Introduction
Dans l’industrie, plusieurs types de robots peuvent cohabiter sur un même site de production. Chacun de ces robots étant dédiés à des tâches, des charges ou des vitesses d’exécution spécifiques. Dans cette phase de recherche de solutions inspirantes pour le projet BATLab112, seules les robots de type bras articulés sont pris en compte.
Systèmes industriels existants
Robots de ligne de production
Ces robots sont conçus pour exécuter quelques actions de manière très répétitive et avec une très grande précision. L’organisation en ligne de production d’un grand nombre de ces robots permet d’exécuter l’ensemble des tâches élémentaires d’un processus de fabrication complexe.
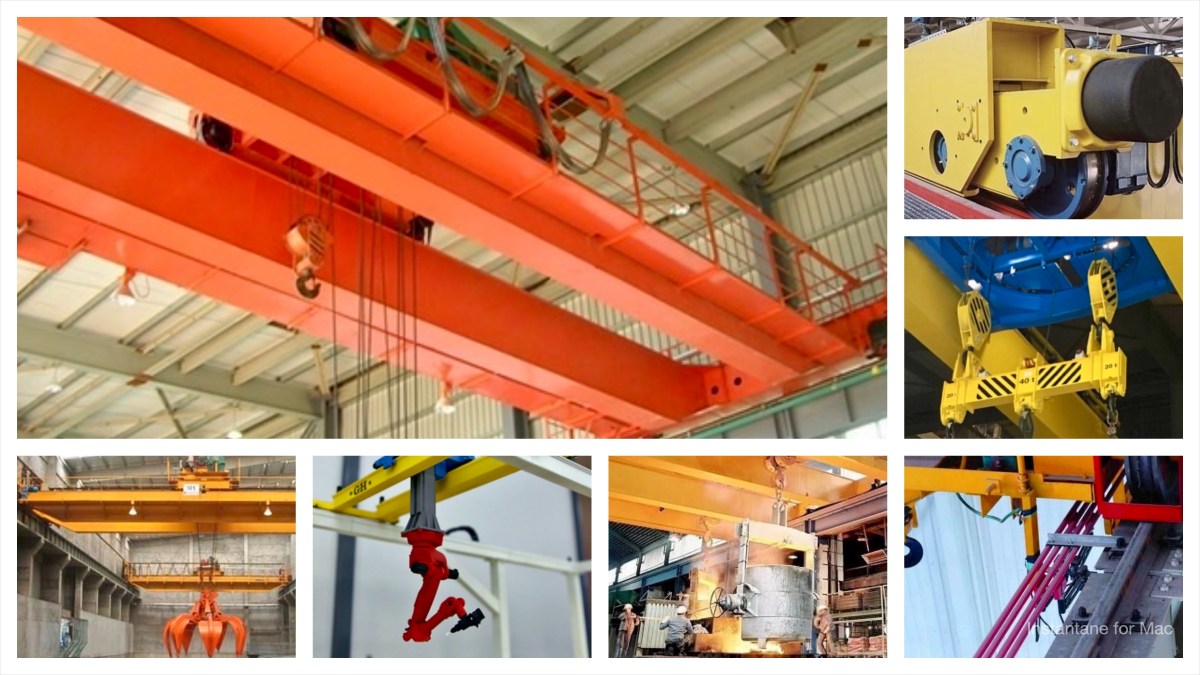
Robots manipulateurs suspendus
Les bras robotiques suspendus offrent l’avantage de ne pas occuper de place au sol, ce qui répond à un besoin d’optimisation de l’espace sur certain site de production.
Robots de levage de charge lourde
Les bras manipulateurs de charges lourdes sont conçus pour la manutention de charges dont la masse peut s’élever jusqu’à plusieurs centaines de kilos.
Quelques exemples inspirants
Cet exemple montre un bras robotique capable de soulever une charge lourde telle qu’une voiture. Ce concept est particulièrement intéressant, car il laisse envisagée une solution de pouvoir soulever la Batmobile si nécessaire.
Cet exemple montre un bras robotique suspendu, dont le design est proche de celui d’un bras capable de lever des charges lourdes. Ce concept est intéressant pour intégrer dans le diorama des bras robotiques capables de lever des charges lourdes tout en ayant un encombrement réduit.