Le remplacement de 4 convertisseurs fréquence/tension par un microcontrôleur Arduino UNO, qui aurait du être l’ultime évolution du système électronique de contrôle du pont élévateur n’était en fait qu’une évolution de transition …
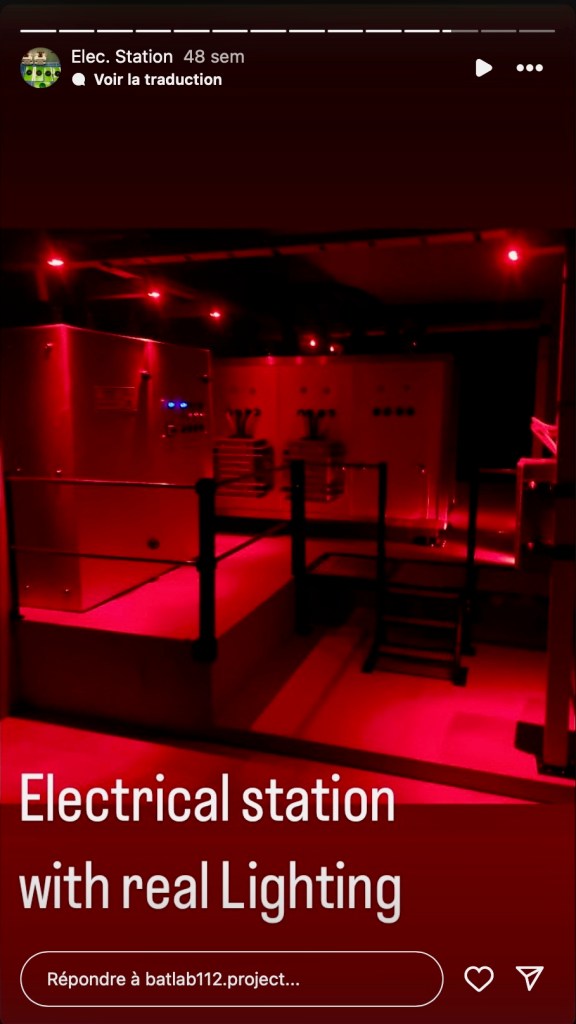
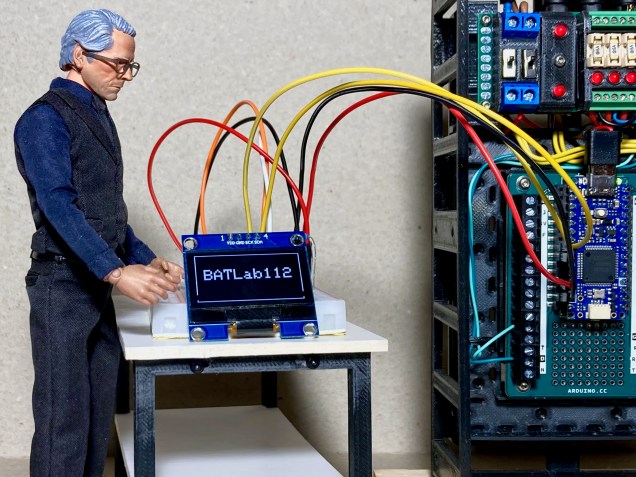
La nouvelle version de l’armoire électrique de contrôle de la vitesse de rotation des moteurs du pont élévateur intègre à présent un microcontrôleur Arduino Nano R4.
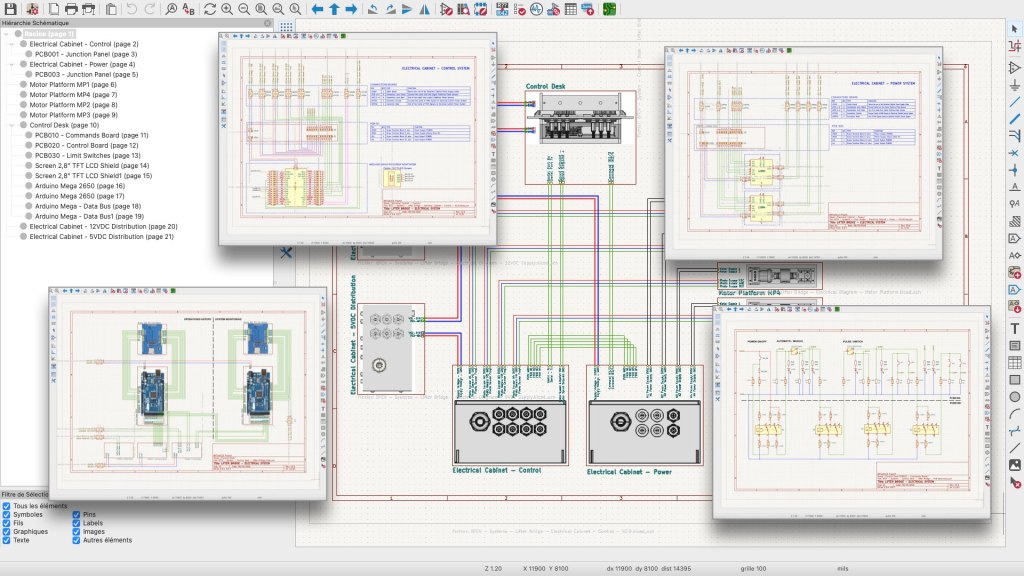
Comme indiqué dans un article précédent, mes premiers travaux de conception électronique ont été réalisés à l’aide de l’éditeur de schémas KiCAD. Dans le cadre pédagogique du projet BATLab112, j’ai constamment veillé à optimiser la qualité et la précision technique de la documentation produite. Au-delà des enjeux strictement liés à l’apprentissage, cette démarche répond également à un objectif opérationnel : assurer une traçabilité rigoureuse de l’avancement de la conception et de la fabrication. Cette exigence s’explique notamment par le rythme parfois irrégulier de l’avancement du projet, fortement conditionné par mes contraintes professionnelles. En effet, le projet BATLab112 est financé sur fonds propres et développé sur mon temps libre. Cette discontinuité dans la planification du travail génère donc des pertes d’efficacité et un risque accru d’erreurs lors de la reprise des activités après de longues périodes d’interruption. C’est précisément ce constat qui m’a conduit à explorer plus en profondeur les fonctionnalités des logiciels utilisés, tels que FreeCAD ou KiCAD, afin de documenter aussi précisément que possible la progression des différentes tâches.
Le présent article s’inscrit dans un contexte particulier. D’une part, l’avancement du pont élévateur à l’échelle 1/12 du diorama, l’équipement industriel le plus complexe du dispositif, a été ralenti à la suite de la réalisation d’une maquette de validation. Les essais menés sur cette maquette ont mis en évidence plusieurs insuffisances dans la conception des schémas électroniques destinés au pilotage du système. D’autre part, cette nécessité de réviser la conception s’est trouvée aggravée par la mise à jour du logiciel vers la version 9.0.7, laquelle a entraîné des comportements inattendus lors de l’ouverture de fichiers créés avec une version antérieure, en particulier ceux reposant sur l’usage de feuilles hiérarchiques.
Face à ces difficultés, il m’a paru indispensable de réexaminer l’usage de cette fonctionnalité afin de renforcer la robustesse de mes futurs fichiers de conception électronique, tout en améliorant la qualité des schémas de commande du pont élévateur.
Principe des feuilles hiérarchiques dans KiCad
Structuration modulaire des schémas électroniques
Dans le logiciel de conception électronique KiCad, la fonctionnalité des feuilles hiérarchiques occupe une place centrale dans la structuration et la gestion de schémas complexes. Elle permet d’organiser un projet en sous-ensembles cohérents, facilitant ainsi la lisibilité, la modularité et la réutilisation des blocs fonctionnels au sein d’un même design ou dans plusieurs projets successifs.
Sur le plan conceptuel, une feuille hiérarchique constitue une représentation encapsulée d’une partie du schéma global. Elle joue un rôle comparable à celui d’un module ou d’une fonction dans un langage de programmation : en isolant une fonction électronique spécifique — telle qu’une alimentation, une interface de commande ou un circuit de régulation — elle permet de clarifier les responsabilités de chaque sous-bloc tout en réduisant la charge cognitive nécessaire à la compréhension du système complet. Cette approche hiérarchique s’avère particulièrement pertinente pour les projets comportant de multiples interactions entre sous-systèmes, où un schéma linéaire et monolithique entraînerait inévitablement une perte de lisibilité.
Création et intégration des feuilles hiérarchiques
Sur le plan opérationnel, KiCad offre deux mécanismes complémentaires au sein de cette fonctionnalité :
La création de feuilles hiérarchiques, qui génère un fichier de schéma distinct et permet de circonscrire un sous-circuit dans un espace dédié.
L’utilisation de symboles hiérarchiques, qui assurent l’intégration de ces sous-schémas au sein du schéma principal, tout en définissant clairement les connexions électriques via des ports d’entrée et de sortie.
Avantages pour la maintenance et la réutilisation des designs
L’un des avantages majeurs de cette approche réside dans la possibilité de réutiliser des blocs fonctionnels sans les reconstruire entièrement. Les concepteurs peuvent ainsi constituer une bibliothèque interne de sous-circuits robustes et validés, contribuant à une standardisation progressive de leurs méthodes de conception. De plus, en cas de modifications, les feuilles hiérarchiques permettent une mise à jour localisée du design, limitant les erreurs potentielles et garantissant une meilleure cohérence globale du projet.
Enfin, la structuration hiérarchique favorise la collaboration au sein d’équipes de conception. Chaque membre peut se voir confier un sous-système particulier, dont le développement est rendu indépendant des autres parties du schéma. Cette division du travail, rendue explicite par la hiérarchie des feuilles, contribue à une gestion plus efficace des tâches ainsi qu’à une documentation technique plus rigoureuse.
Application au pont élévateur du projet BATLab112
Principe de fonctionnement du pont élévateur
Le pont élévateur intégré au diorama du projet BATLab112 a pour fonction d’assurer le déplacement vertical de la Batmobile entre les deux niveaux de l’atelier robotisé. Son principe de fonctionnement s’inspire directement des ponts élévateurs électriques à quatre colonnes utilisés dans l’industrie automobile pour le levage de véhicules lourds à des fins de maintenance. Chaque colonne de ce type de dispositif est équipée d’une vis sans fin entraînée par un moteur électrique. La synchronisation des quatre moteurs permet de contrôler de manière coordonnée la montée ou la descente de la plateforme supportée par l’ensemble des colonnes, en fonction du sens de rotation imposé à ces derniers.
Intégration dans l’atelier robotisé du diorama
Cet équipement s’insère dans un ensemble plus large d’installations composant le diorama du projet BATLab112, lequel comprend notamment :
Une plateforme rotative soutenue par les colonnes du pont élévateur
Un pont roulant bipoutre équipé de deux bras robotiques destinés à la manipulation de charges importantes
Un poste électrique assurant la distribution de l’énergie nécessaire au fonctionnement des différents équipements
Quatre consoles de commande dédiées au pilotage individuel de chacun de ces sous-systèmes.
L’ensemble de ces dispositifs vise à atteindre un niveau élevé de réalisme tant fonctionnel qu’esthétique.
Architecture hiérarchique du schéma électrique
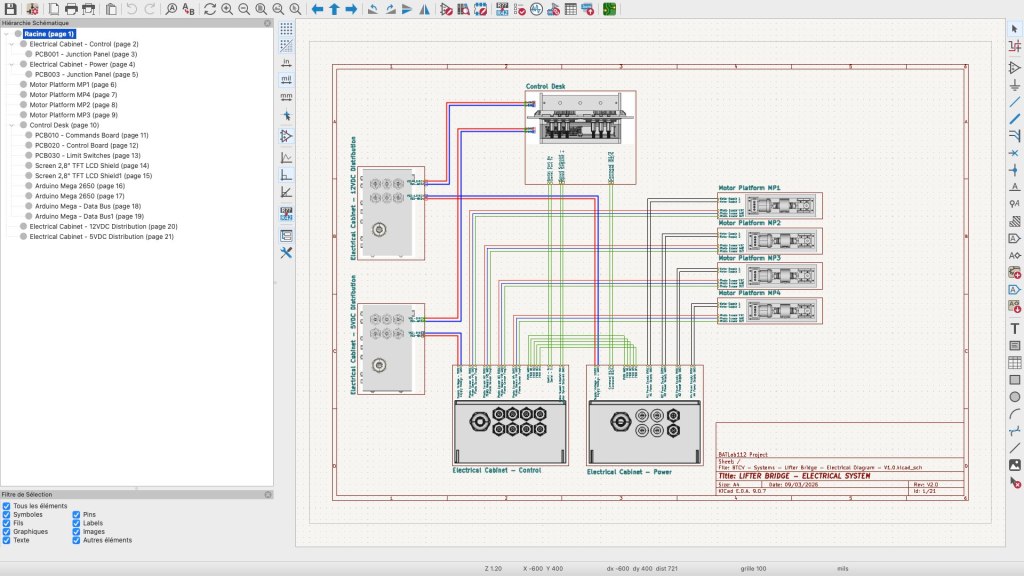
Niveau 1 : Architecture générale du système
Le premier niveau hiérarchique du schéma électrique du pont élévateur correspond à la structure générale de son architecture de commande et d’alimentation. Il comprend :
Une console de commande
Deux armoires électriques destinées respectivement à l’asservissement des moteurs (régulation, contrôle du sens de rotation, ajustement de la vitesse)
Quatre plateformes moteurs assurant l’entraînement mécanique des quatre colonnes
Deux armoires issues du poste électrique, garantissant une distribution de l’énergie électrique
Niveau 2 : Organisation interne des équipements
Le second niveau hiérarchique décrit l’organisation interne des modules constituant chacun des équipements précédemment mentionnés.
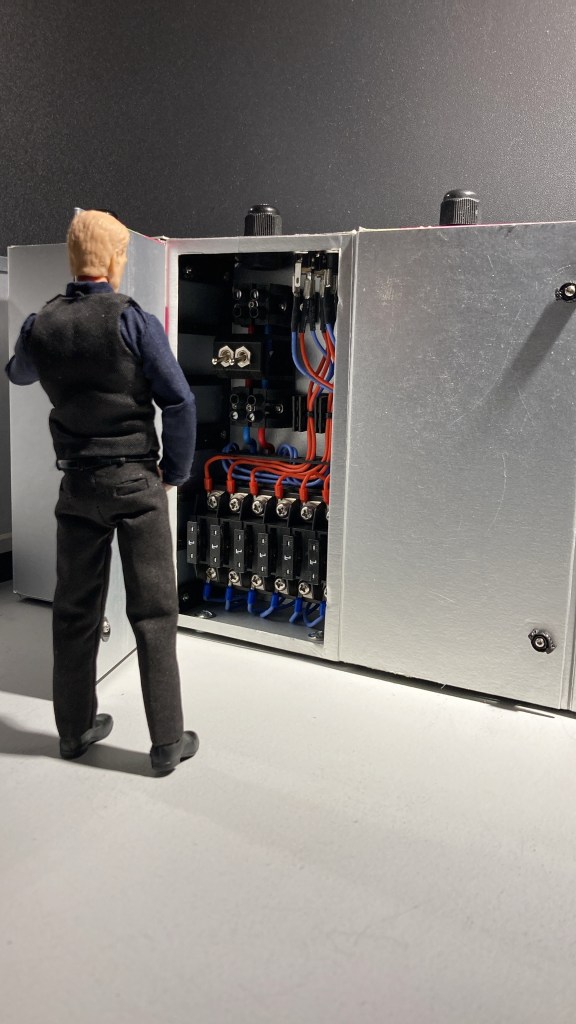
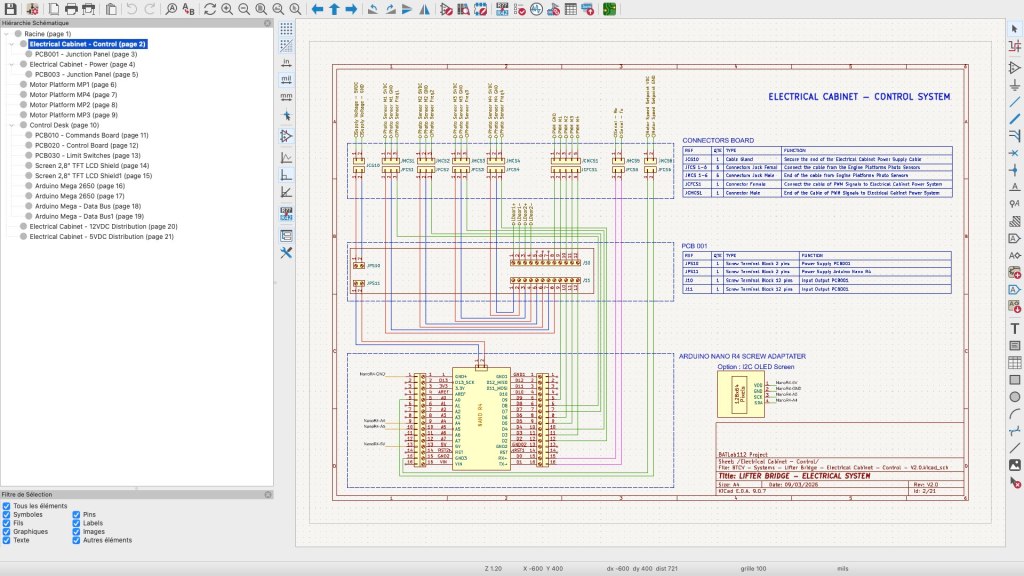
Armoire électrique 1 : Régulation de la vitesse de rotation des moteurs
L’armoire électrique qui regroupe les équipements électroniques de régulation de la vitesse de rotation des moteurs contient :
Un module adaptateur accueillant un microcontrôleur de type Arduino R4
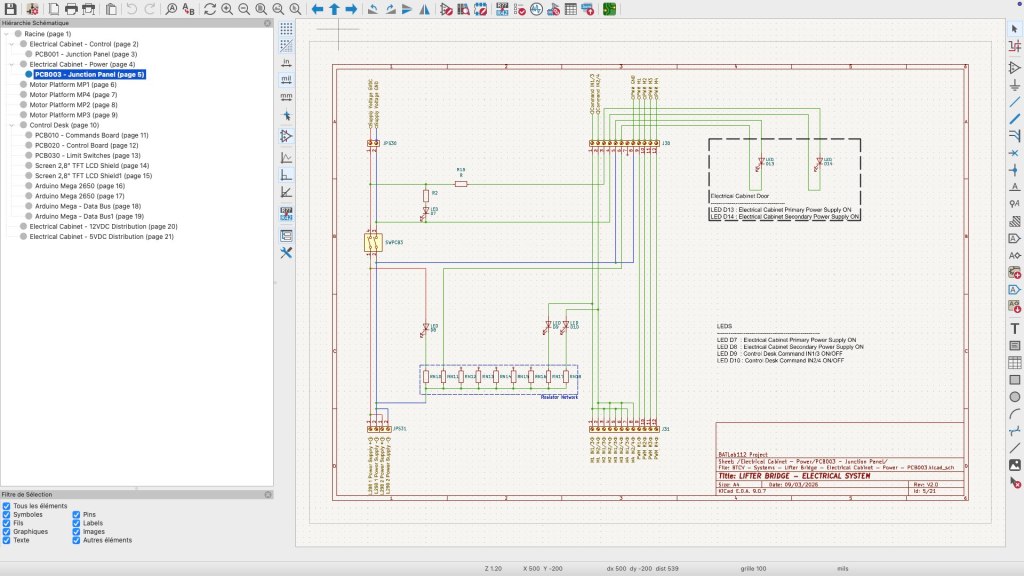
Un circuit imprimé (PCB) regroupant les fonctions de sectionneur principal, porte-fusible et bornier.
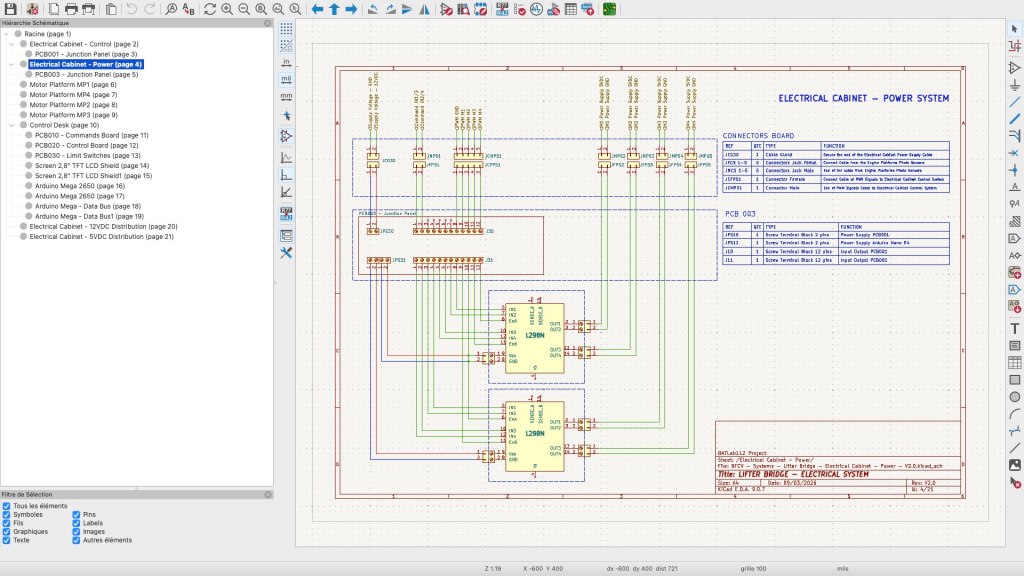
Armoire électrique 2 : Interface de puissance électrique et de contrôle du sens de rotation des moteurs
L’armoire électrique qui regroupe les équipements électroniques de contrôle du sens de rotation des moteurs contient :
Deux modules constitués de doubles ponts en H
Un circuit imprimé (PCB) regroupant les fonctions de sectionneur principal et bornier.
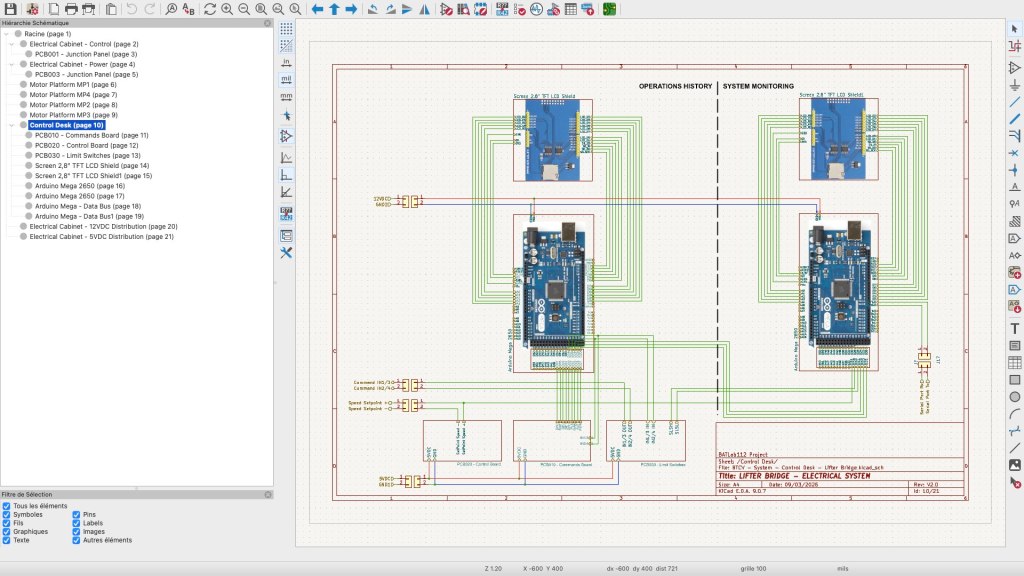
Console de commande
La console de commande contient :
Deux cartes Arduino Mega 2560, associées à deux écrans LCD TFT de 2,8 pouces
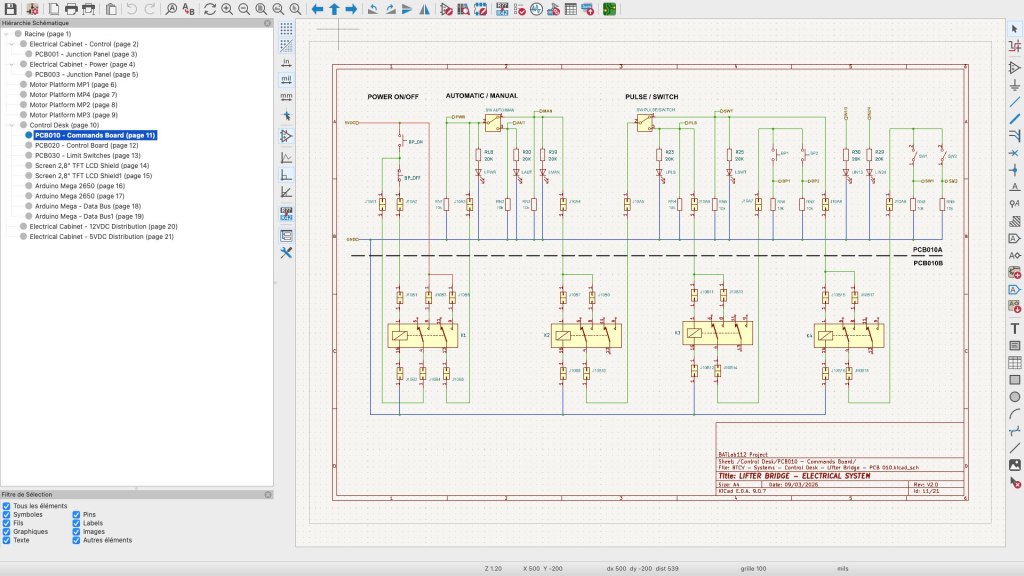
Trois circuits imprimés (PCB) dédiés aux fonctions de commande électronique.
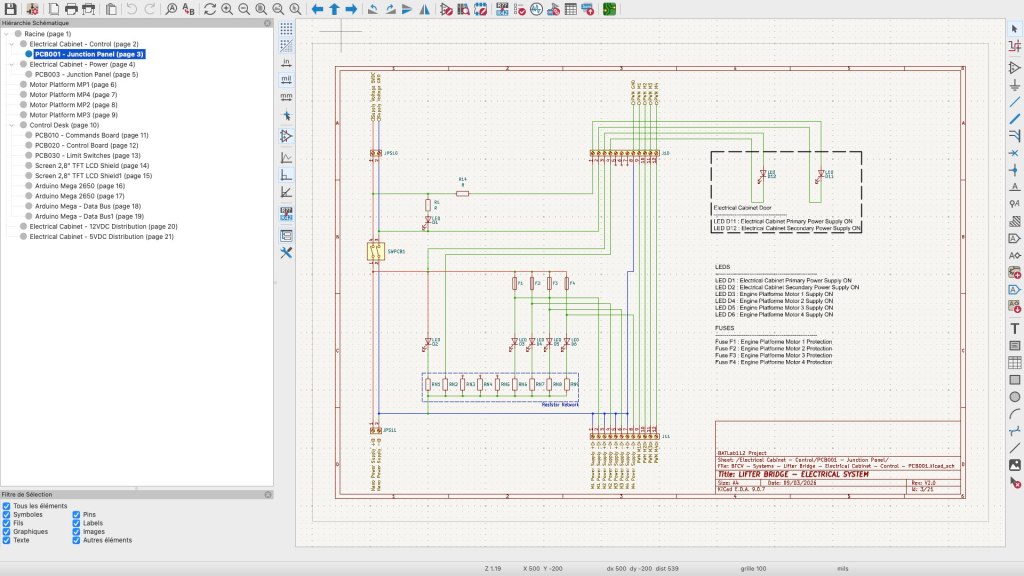
Niveau 3 : Conception détaillée des circuits électroniques
Enfin, le troisième niveau hiérarchique permet de détailler le schéma électronique propre à chacun des PCB identifiés au niveau supérieur. Ce niveau constitue l’unité de description la plus fine, garantissant une documentation précise et exploitable pour la conception, la vérification et la maintenance des différents modules électroniques du pont élévateur.
Conclusion
Le fichier final de conception réalisé sous KiCad regroupe l’ensemble des feuilles schématiques correspondant à tous les modules de chacun des niveaux hiérarchiques. Cette organisation centralisée offre une navigation efficace au sein du projet : elle permet de sélectionner rapidement le degré de détail souhaité lors de la consultation des schémas, tout en conservant une vision d’ensemble du fonctionnement global du système. Une telle visibilité est particulièrement utile pour appréhender la structure et la cohérence des liaisons établies entre les différents équipements définis au premier niveau hiérarchique.
Pour plus d’infos
Pour en apprendre plus sur le contenu et le fonctionnement de ces schémas
Pour découvrir le diorama à l’échelle 1/12 du projet BATLab112
Cet article détaille l’optimisation de l’électronique embarquée de l’armoire électrique de contrôle du pont élévateur du projet BATLab112, intégrant un Arduino Nano R4. Cette évolution améliore la compacité de l’armoire électrique, la robustesse du câblage et la maintenabilité du système. Le Nano R4 permet également un pilotage plus précis des moteurs via des signaux PWM,…
Migration Arduino Uno vers Nano R4 : évolution du système de contrôle du pont élévateur
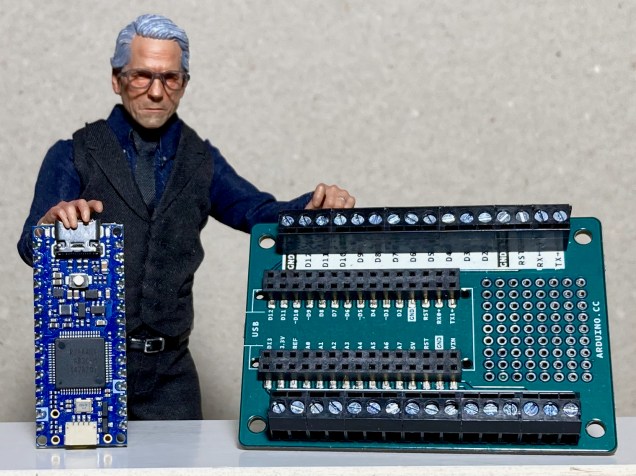
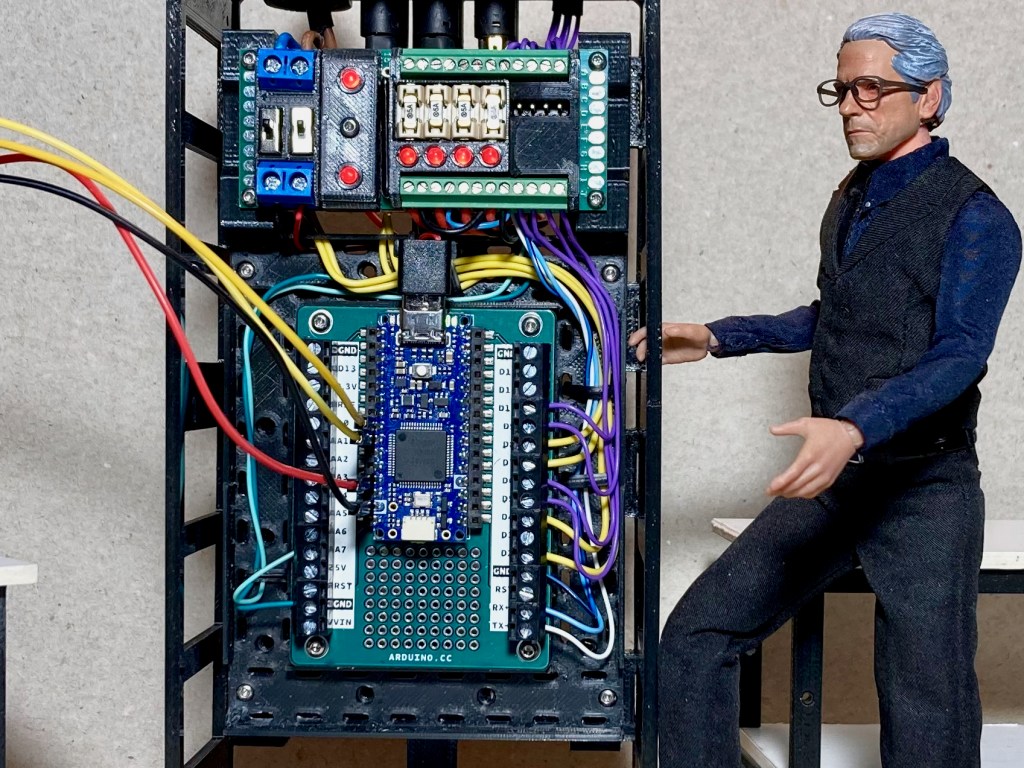
Suite à la phase de prototypage précédente, consacrée à la validation du principe de mesure et de régulation des vitesses des quatre moteurs du pont élévateur, une nouvelle évolution technique a été engagée : le remplacement de la carte Arduino Uno utilisée pour l’acquisition des signaux par une carte Arduino Nano R4 montée sur une carte adaptateur avec borniers à vis.
Cette mise à jour s’inscrit dans une démarche d’amélioration continue visant à renforcer la fiabilité, la compacité et la maintenabilité de l’électronique de commande du pont élévateur du diorama de la Batcave dans le cadre du projet BATLab112.
Validation du prototype précédent : acquisition des signaux et régulation PWM des moteurs
Le prototype antérieur avait permis de démontrer qu’une seule carte Arduino pouvait avantageusement remplacer les modules de conversion fréquence/tension initialement envisagés. L’Arduino Uno assurait alors la lecture des quatre signaux issus des capteurs optiques, leur traitement, puis la transmission des informations vers la console de commande.
Si cette architecture s’est révélée fonctionnelle, elle présentait néanmoins certaines limites. D’une part, l’encombrement de la carte Arduino Uno constituait une contrainte notable au regard des dimensions internes de l’armoire électrique. D’autre part, cette solution n’apportait pas d’amélioration significative en matière de robustesse du câblage, point identifié comme critique lors des phases de validation précédentes, notamment avec l’utilisation de PCB dédiés à la conversion fréquence/tension.
Arduino Nano R4 : une solution compacte pour systèmes embarqués contraints
Miniaturisation et intégration optimisée dans l’armoire électrique
Le format Nano, même associé à une carte adaptateur avec borniers à vis, permet un gain de place significatif par rapport à une carte Arduino Uno. Cette réduction d’encombrement autorise une implantation verticale du module sur son support, optimisant ainsi l’organisation interne de l’armoire électrique.
Cette nouvelle configuration favorise une circulation plus rationnelle des câbles, désormais intégrés dans des chemins dédiés. Elle contribue également à améliorer le réalisme global du diorama, en rapprochant l’architecture de celle d’une installation industrielle réelle.
Connectique renforcée : bornier à vis et accessibilité des signaux pour maintenance
Fiabilité du câblage et robustesse des connexions
L’utilisation d’une carte adaptateur équipée de borniers à vis constitue une amélioration majeure en termes de fiabilité. Ces connecteurs offrent une meilleure tenue mécanique et réduisent les risques de faux contacts, en particulier dans un environnement soumis à des manipulations ou à des vibrations.
Cette évolution corrige les limites observées sur les précédents modules de conversion, dont la connectique était moins adaptée à une exploitation durable.
Accès simplifié et modularité pour tests et mises à jour
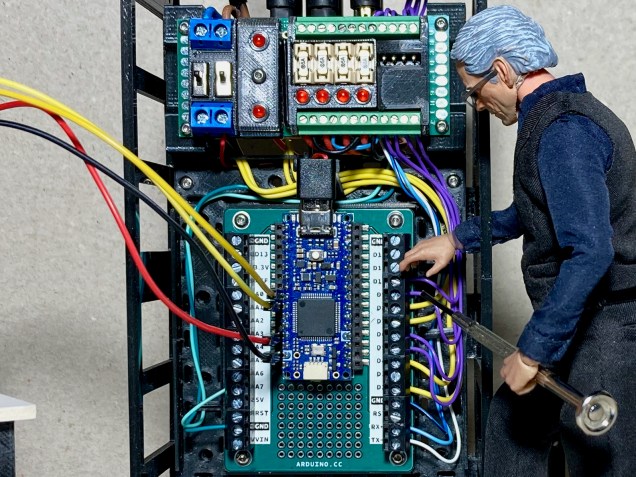
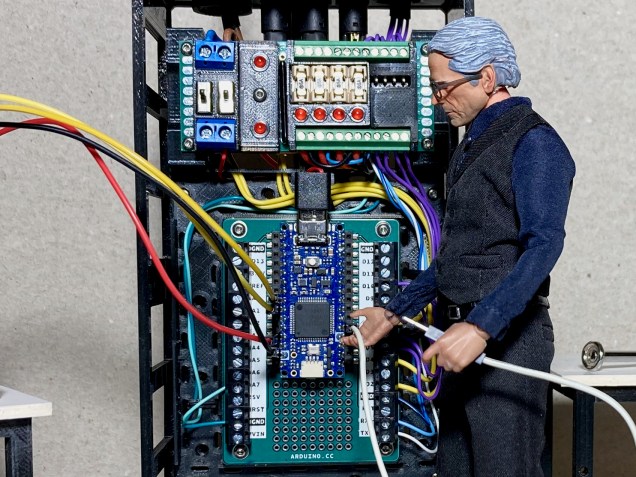
Le faible encombrement de l’Arduino Nano R4 et son mode de connexion à la carte adaptateur facilitent les opérations de maintenance. Il devient possible de retirer rapidement la carte pour effectuer des mises à jour du programme (sketch) ou réaliser des tests fonctionnels en toute sécurité.
Par ailleurs, le connecteur support du Nano R4 est doté d’une double rangée de broches, permettant l’utilisation de câbles de prototypage. Cette caractéristique autorise la réalisation de mesures de contrôle directement sur les entrées et sorties de la carte, sans démontage du système, ce qui constitue un atout important en phase de mise au point.
Communication et alimentation : exploitation du port USB-C et interfaces embarquées
Le connecteur USB-C de l’Arduino Nano R4 présente un double avantage. Il permet non seulement d’assurer l’alimentation électrique de la carte, mais également d’envisager une communication directe avec l’environnement de développement Arduino (IDE).
Cette double fonctionnalité simplifie les opérations de configuration, de diagnostic et de mise à jour logicielle, tout en limitant le nombre de connectiques nécessaires. Elle s’inscrit pleinement dans une logique de simplification et de rationalisation de l’architecture embarquée.
Nouvelle architecture de l’armoire électrique de contrôle : intégration et performance du système
Optimisation de l’architecture de l’armoire électrique grâce à l’Arduino Nano R4
Cette démarche d’amélioration s’étend également au PCB de raccordement interne de l’armoire électrique. Dans sa version précédente, celui-ci présentait des limites de conception, notamment une résistance mécanique insuffisante pour supporter les contraintes induites par les opérations de vissage et de dévissage des câbles au niveau des connecteurs. La nouvelle version corrige ces faiblesses en renforçant la robustesse mécanique de la carte, tout en intégrant des fonctionnalités supplémentaires. Elle inclut désormais une protection par fusibles de la distribution électrique issue de l’armoire, ainsi que des broches dédiées aux tests fonctionnels de transmission des signaux PWM.
Transmission directe des signaux PWM via RJ12 vers les modules de puissance L298N
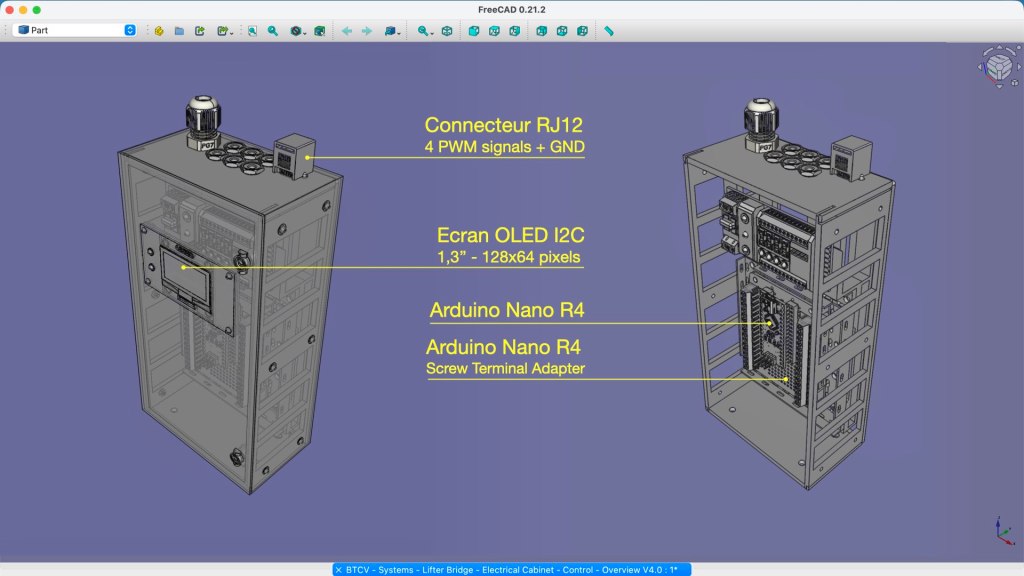
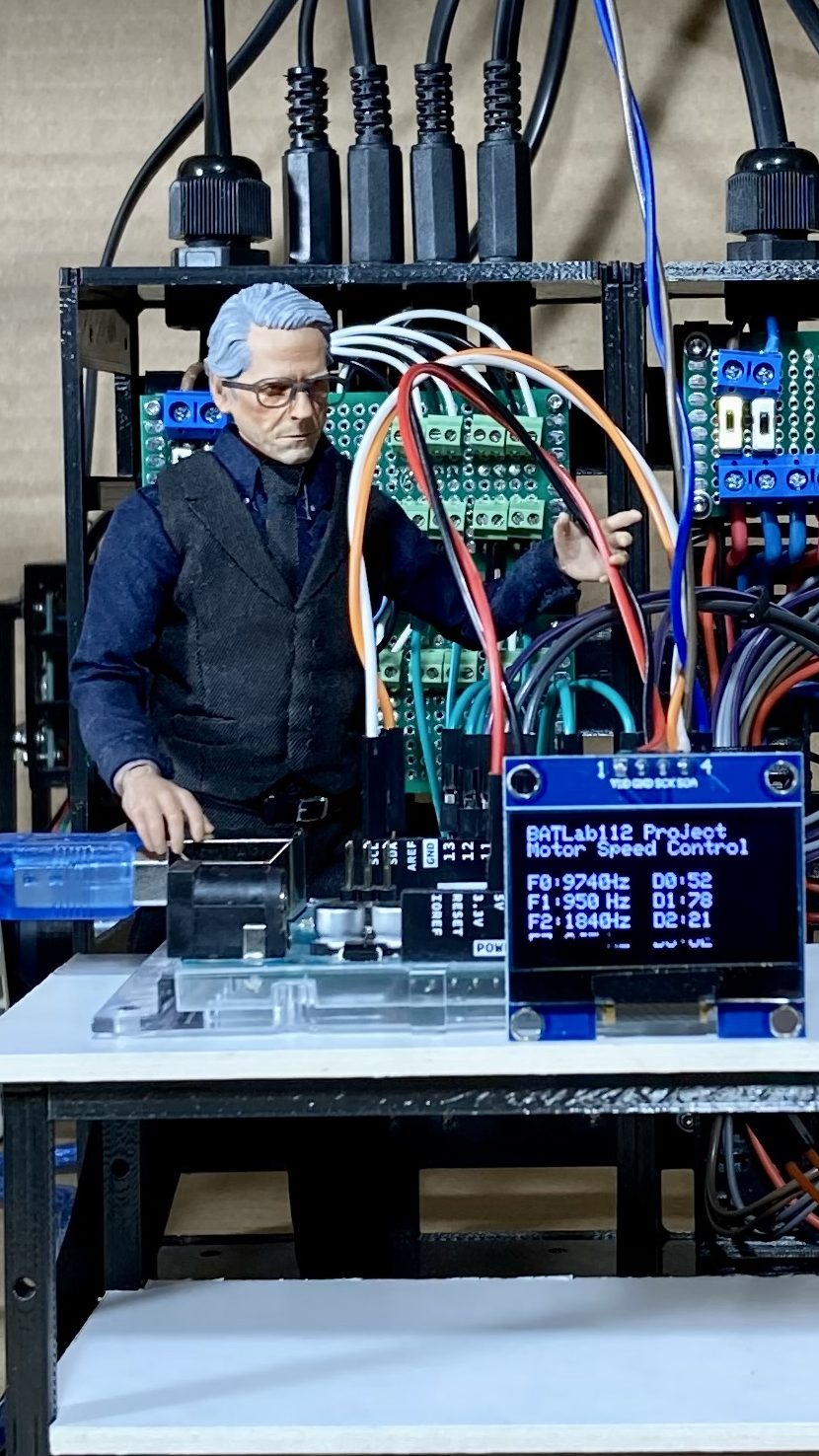
Les capacités de l’Arduino Nano R4 permettent d’envisager une évolution fonctionnelle notable : la transmission directe, via un câble RJ12, des signaux PWM dédiés à la régulation de la vitesse de rotation de chacun des moteurs. Ces signaux sont acheminés vers des modules de puissance de type L298N, en charge du pilotage effectif des moteurs au sein de l’armoire de puissance.
Cette organisation contribue à simplifier la chaîne de commande, en réduisant les intermédiaires électroniques, tout en renforçant la cohérence entre les niveaux de contrôle et de puissance. Elle favorise également une meilleure lisibilité des flux fonctionnels au sein du système.
Intégration d’un écran OLED I2C pour supervision locale et diagnostic embarqué
Dans ce nouveau contexte, l’intégration d’un écran OLED local apparaît comme une évolution cohérente. Connecté via le bus i2c, cet équipement offre la possibilité d’afficher en temps réel l’état de fonctionnement du système au plus près de son implantation. Il constitue ainsi un outil précieux pour les opérations de supervision, de diagnostic et de maintenance, en fournissant un retour d’information direct et indépendant de la console principale.
Évolution logicielle du système embarqué : adaptation au Nano R4
Le changement de carte ne s’est pas limité à une évolution matérielle. Il s’est accompagné d’une refonte du script Arduino afin d’exploiter pleinement les capacités du Nano R4. Cette évolution logicielle vise à améliorer la précision des mesures, la qualité de la régulation et la robustesse globale du système de contrôle du pont élévateur.
Mesure précise des vitesses moteur : acquisition optimisée des signaux capteurs
Dans la version précédente reposant sur des convertisseurs fréquence/tension, les signaux issus des capteurs optiques présentaient des fréquences trop faibles pour permettre une mesure précise et fiable. Cette limitation impactait directement la qualité du retour d’information nécessaire à la régulation.
L’utilisation directe de l’Arduino Nano R4 permet désormais une lecture plus fine des quatre signaux des capteurs optiques. Grâce à une meilleure résolution temporelle et à une acquisition directe des impulsions, le système est capable de mesurer avec précision les variations de vitesse des moteurs.
Régulation PWM optimisée : amélioration du calcul du rapport cyclique
L’évolution logicielle a également porté sur l’optimisation de la régulation des moteurs. Le calcul du rapport cyclique des signaux PWM a été affiné afin d’assurer un pilotage plus précis de la vitesse de rotation.
L’intégration de la bibliothèque dédiée « pwm.h » facilite la gestion des signaux PWM en offrant des fonctions plus adaptées et plus performantes. Elle permet notamment de simplifier la génération des signaux tout en améliorant leur précision.
Conclusion : Arduino Nano R4, une évolution clé pour un pont élévateur miniature fiable et performant
Transition Arduino Uno vers Nano R4 : bilan des améliorations matérielles et fonctionnelles
Le passage de l’Arduino Uno au Nano R4 marque une étape significative dans le développement de l’électronique du pont élévateur. Plus compact, plus performant et mieux adapté aux contraintes d’intégration en environnement miniature, ce nouveau contrôleur contribue à une amélioration globale du système.
Au-delà du gain d’encombrement, cette évolution se traduit par une meilleure maîtrise des aspects techniques, notamment en matière de précision de mesure, de régulation des moteurs et de qualité du câblage. Elle participe également à l’amélioration de l’esthétique du dispositif, en permettant une intégration plus discrète et plus cohérente avec le réalisme recherché.
Projet BATLab112 : vers un système embarqué miniature inspiré des standards industriels
Cette évolution ne se limite pas à un simple remplacement de carte électronique. Elle illustre la maturation progressive du projet BATLab112, qui tend à dépasser le stade du prototype expérimental pour se rapprocher d’un système embarqué structuré, fiable et maintenable.
La conception du diorama technique s’inscrit ainsi dans une logique comparable à celle d’un projet industriel : prise en compte des contraintes d’intégration, fiabilisation des connexions, optimisation des performances et anticipation des besoins de maintenance. Le pont élévateur devient alors un véritable équipement miniature, dont le fonctionnement et l’architecture s’inspirent directement des standards de l’ingénierie embarquée.
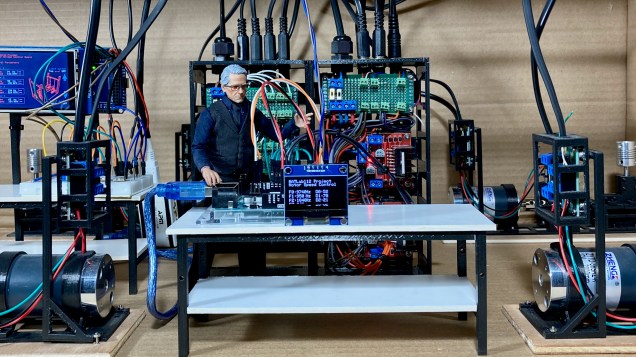
Perspectives : intégration finale et tests en conditions réelles
La prochaine étape du projet consistera à intégrer l’armoire électrique de Contrôle avec cette nouvelle architecture électronique au sein du système électronique de commande du pont élévateur. Cette phase permettra de valider le comportement du système en conditions réelles d’exploitation.
Le film Justice League diffusé en 2021 est la version director’s cut du film Justice League, sorti en 2017. Réalisé par Zack Snyder et diffusé en 2021, ce long-métrage propose un récit étendu et remanié, plus fidèle à la vision originelle du cinéaste.
Synopsis
Synopsis (VO)
In Zack Snyder’s Justice League, determined to ensure Superman’s ultimate sacrifice was not in vain, Bruce Wayne aligns forces with Diana Prince with plans to recruit a team of metahumans to protect the world from an approaching threat of catastrophic proportions. The task proves more difficult than Bruce imagined, as each of the recruits must face the demons of their own pasts to transcend that which has held them back, allowing them to come together, finally forming an unprecedented league of heroes. Now united; Batman, Wonder Woman, Aquaman, Cyborg and the Flash must save the planet from Steppenwolf, DeSaad and Darkseid and their dreadful intentions.
Dans Zack Snyder’s Justice League, Bruce Wayne (Ben Affleck), bien décidé à ce que le sacrifice ultime de Superman (Henry Cavill) ne soit pas vain, s’associe à Diana Prince (Gal Gadot) dans le but de recruter une équipe de métahumains et protéger le monde.
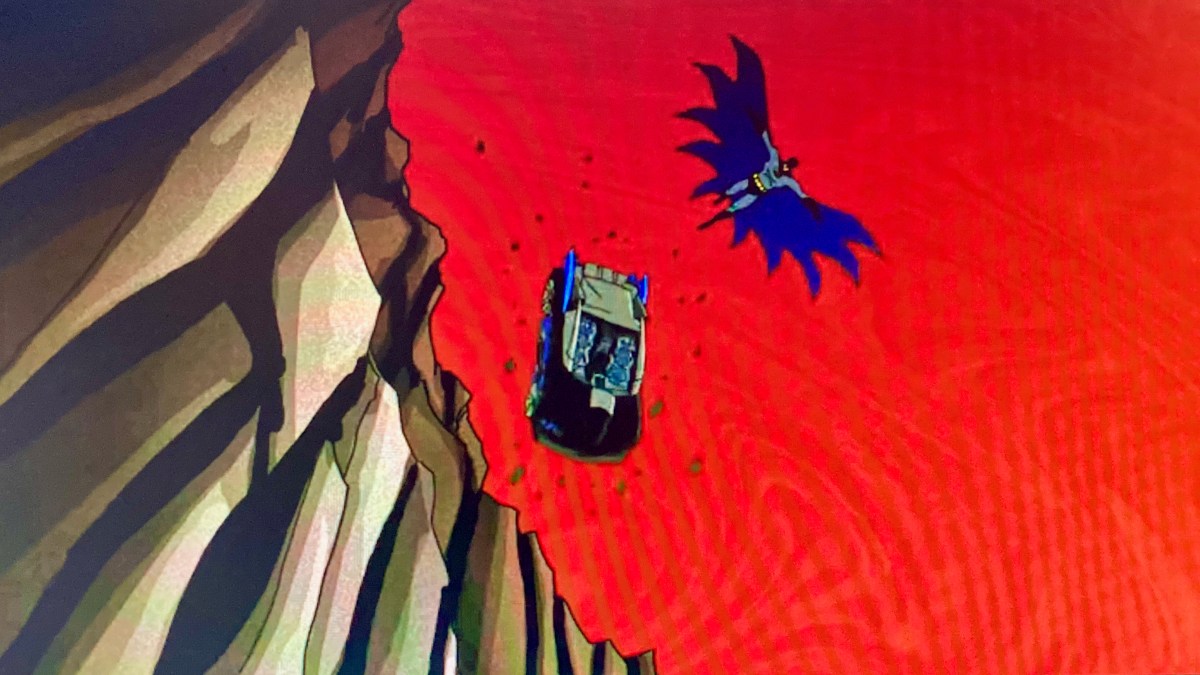
Dans la séquence de la bataille finale, Batman décide de se placer en première ligne, tout d’abord seul aux commandes du Flying Fox pour percer le dôme de défense érigé par Steppenwolf, puis à bord de la Batmobile équipée d’un puissant arsenal embarqué. Grâce à un signal audio de fréquences spécifiques, émis depuis la Batmobile, Batman détourne l’attention des Paradémons sur lui. Ce procédé confère au véhicule le statut d’appât tactique, absorbant la majeure partie de l’assaut ennemi et permettant ainsi aux autres membres de la Justice League de poursuivre leur mission sans être entravés par la masse des créatures.
Dans sa course en direction du pilier centrale des lignes de défense de Steppenwolf, attaquée de toute part par un véritable essaim de Paradémons, la Batmobile abat un grand nombre de ces créatures mais subit des dommages par les quelques assaillants qui parviennent à s’agripper à la structure de la Batmobile pour essayer de lui arracher ses canons. Lorsque la Batmobile arrive au pied du pilier central, elle se trouve sous les feux croisés de puissants canons énergétiques. Un impact direct projette le véhicule en l’air avant de provoquer son explosion. Batman s’éjecte à temps et poursuit le combat au corps à corps.
Analyse et portée symbolique
Cette séquence met en lumière la contribution spécifique de Batman à la dynamique collective. Son absence de pouvoirs surhumains est compensée par une compréhension fine de la guerre asymétrique, sa capacité à exploiter la technologie comme multiplicateur de force et accepter le risque individuel pour garantir l’efficacité du groupe. En ce sens, la Batmobile dans Justice League ne doit pas être interprétée uniquement comme un symbole iconique de la mythologie de Batman, mais comme un outil narratif destiné à traduire en termes visuels la dimension militaire et sacrificielle de son rôle.
La destruction de la Batmobile dans Zack Snyder’s Justice League ne résulte pas d’un affrontement technologique, mais de la confrontation avec une force quasi illimitée en nombre. Le véhicule, symbole de l’ingéniosité et de la puissance technologique de Batman, se trouve ici dépassé non pas par une invention plus avancée, mais par l’accumulation incessante de créatures attirées par sa présence.
La séquence souligne la dimension sacrificielle de l’acte de Batman. En dirigeant la Batmobile au cœur du combat, il accepte de perdre son arme la plus emblématique pour offrir un répit à ses alliés dotés de capacités surnaturelles. Le véhicule cesse alors d’être un simple instrument technologique pour devenir un élément narratif servant à illustrer la détermination du héros à s’exposer lui-même, et à exposer ses ressources, au-delà de toute logique de préservation. Ainsi, la destruction de la Batmobile prend une valeur symbolique double : elle marque à la fois les limites de la technologie humaine face à cette invasion extraterrestre et la transition de Batman d’un rôle d’homme derrière la machine, à celui de stratège et de chef prêt à se sacrifier pour que l’équipe puisse l’emporter.
Objet emblématique en constante mutation, la Batmobile s’impose comme l’un des symboles les plus puissants et les plus signifiants du mythe de Batman. Véhicule, armure…
Dans The Batman (2022), le réalisateur Matt Reeves propose une réinterprétation radicale de la Batcave, marquant une rupture nette avec les représentations antérieures du mythe.
Ce film intitulé The Dark Knight en version originale est le deuxième film de la trilogie réalisée par Christopher Nolan, sorti en 2008.
Synopsis
Synopsis (VO)
Batman, Lieutenant Gordon, and District Attorney Harvey Dent set out to dismantle organized crime in Gotham, but are soon confronted by the chaos unleashed by the Joker, who pushes the city — and Batman himself — to their limits.
Batman, le lieutenant Gordon et le procureur Harvey Dent entreprennent de démanteler le crime organisé à Gotham, mais se retrouvent rapidement confrontés au chaos instauré par le Joker, qui met à l’épreuve la ville et Batman lui-même.
Batman est plus que jamais déterminé à éradiquer le crime organisé qui sème la terreur en ville. Epaulé par le lieutenant Jim Gordon et par le procureur de Gotham City, Harvey Dent, Batman voit son champ d’action s’élargir. La collaboration des trois hommes s’avère très efficace et ne tarde pas à porter ses fruits jusqu’à ce qu’un criminel redoutable vienne plonger la ville de Gotham City dans le chaos.
Résumé détaillé
La destruction de la Batmobile, appelée Tumbler dans cette trilogie, survient lors d’une séquence centrale du film. Batman escorte Harvey Dent, qui s’est volontairement livré à la police afin de servir d’appât au Joker. Une poursuite s’engage dans les rues de Gotham : le convoi est pris pour cible par les hommes du Joker, lourdement armés. Le Tumbler absorbe dans un premier temps les attaques, sa conception militaire lui permettant de résister aux impacts d’armes automatiques et aux explosions.
Cependant, l’affrontement atteint son paroxysme lorsque le Joker déploie un lance-roquettes. Le projectile atteint de plein fouet le Tumbler, qui encaisse l’impact mais dont la structure se trouve irrémédiablement compromise. Le véhicule s’arrête, endommagé au-delà de toute réparation, avant d’entrer en phase d’autodestruction partielle. De cette carcasse fumante s’extrait alors la Batpod, une moto intégrée au châssis du Tumbler, que Batman enfourche pour poursuivre la traque.
Analyse et portée symbolique
La destruction du Tumbler s’inscrit dans une logique narrative et symbolique de fragilisation. Contrairement à l’image traditionnelle de la Batmobile comme machine invulnérable et incarnation de la supériorité technologique de Batman, Nolan choisit de montrer sa vulnérabilité face à une escalade de violence et de chaos incarnée par le Joker. La séquence fonctionne comme une rupture : le héros se voit privé de son outil le plus puissant au moment où la menace atteint son intensité maximale.
Mais la scène introduit également une dynamique de renouveau. La révélation de la Batpod, jaillissant littéralement des ruines du Tumbler, illustre la capacité d’adaptation et la prévoyance stratégique de Batman. La perte du véhicule principal ne signe pas une défaite totale, mais marque une mutation nécessaire, symbolisant la transition d’une puissance brute à une mobilité plus flexible. Ainsi, la scène dépasse l’effet spectaculaire pour fonctionner comme un pivot symbolique : elle illustre la vulnérabilité des outils du héros, tout en affirmant sa capacité à se réinventer face au chaos.
Dans le film Batman v Superman: Dawn of Justice de Zack Snyder, diffusé en 2016, la Batcave est radicalement différentes des représentations souterraines et gothiques…
Dans le film Batman de Tim Burton en 1989, la Batcave est plongée dans une ambiance sombre où quelques éclats ponctuels de lumière artificielle contraste…
Depuis sa première apparition officielle en 1944, dans Detective Comics n°83, la Batcave s’est imposée comme un espace mythique au sein de l’univers de Batman.
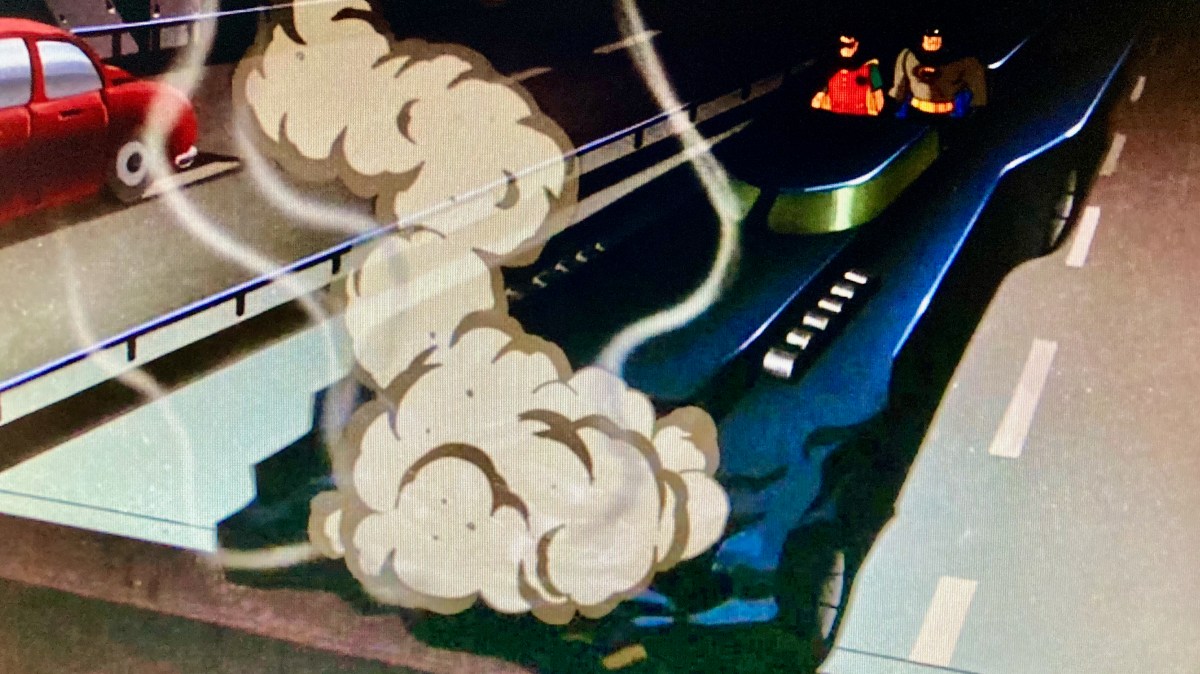
Cet épisode intitulé Nanovirus en version française est le cinquième épisode de la saison 3 de la série animée The Batman, diffusée entre 2004 et 2008.
Synopsis
Synopsis (VO)
A new villain, Gearhead, makes his first appearance robbing a charity race, and Batman soon finds himself forced to upgrade the Batmobile, after it is destroyed, to keep up with the cybernetic villain.
Un nouveau méchant, Gearhead, fait sa première apparition en volant une course caritative, et Batman se retrouve bientôt obligé de mettre à niveau la Batmobile, après sa destruction, pour suivre le méchant cybernétique.
Cet épisode met en scène une confrontation entre Batman et Gearhead, un ancien pilote de course dont la carrière fut brisée à la suite d’un accident, gravement mutilé, qui a survit grâce à l’implantation de prothèses cybernétiques de haute technologie qui lui permettent notamment de se connecter à divers systèmes électroniques.
Gearhead au volant d’une voiture devenue une extension de lui-même, grâce aux nanotechnologies de ses prothèses cybernétiques, attaque un fourgon de transport de fond. Batman se lance alors dans une course poursuite à très grande vitesse dans les rues de Gotham, qui tourne rapidement à l’avantage de Gearhead. Sortie de Gotham, sur une route sinueuse et escarpée, Gearhead éblouît Batman à l’aide d’un puissant flash, à l’entrée d’un virage dangereux, Batman perd le contrôle de la Batmobile qui effectue une sortie de route. Batman a juste le temps de s’éjecter avant que la Batmobile s’écrase et explose au fond du ravin. Batman ne peut que faire face à la Batmobile en feu, laissant s’éloigner Gearhead.
De retour à la Batcave, Batman aidé de Alfred, décide de construire une nouvelle Batmobile plus performante grâce notamment à un nouveau prototype de moteur en cours de développement au sein des entreprises Wayne Technologies.
Analyse et portée symbolique
La destruction de la Batmobile survient dans le cadre d’une confrontation directe avec un antagoniste dont les ressources technologiques surpassent, pour la première fois dans la série animée, celles du véhicule emblématique de Batman. Cet épisode marque une rupture symbolique : la Batmobile, généralement présentée comme l’incarnation de l’ingéniosité et de la supériorité technique du héros, se trouve cette fois-ci dépassée et vulnérable. La séquence s’impose par son intensité visuelle et dramatique. Contrairement à d’autres adaptations où le véhicule n’est que temporairement endommagé, il est ici totalement anéanti, consumé par une explosion qui le réduit en cendres et en flammes. Cette destruction dépasse la simple perte matérielle : elle remet en cause, de manière inédite, le rapport de Batman à sa propre technologie et à l’illusion d’invincibilité qu’elle conférait.
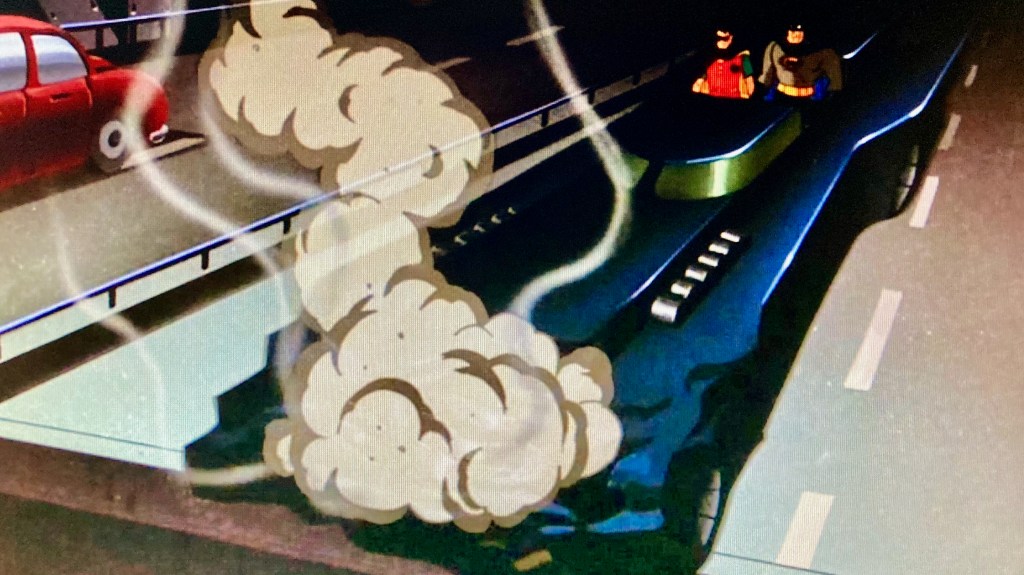
Cet épisode intitulé Le super mécanicien en version française (The Mechanic en VO) est le 55eme de la série animée Batman, diffusée à partir 1992.
Synopsis
Synopsis (VO)
Thanks to an accident during a high-speed chase, the Batmobile is virtually demolished. When Batman takes the car to his mechanic Earl Cooper, the Penguin discovers the repair shop and tampers with the Batmobile, putting it under his control.
Synopsis (VF)
La bande du Penguin s’échappe et la Batmobile est pratiquement désintégrée lors d’une poursuite à haute vitesse.
Résumé détaillé de la scène
Cet épisode s’ouvre sur une séquence de course poursuite à dans les rues de Gotham entre Batman et Robin à bord de la Batmobile et une voiture dont l’ornement de capot est à l’effigie du Pinguin. Alors qu’il talonne la voiture, Batman est confronté à une manœuvre désespérée de ses adversaires : ceux-ci s’élancent vers un pont levant dont le tablier est en cours de descente, parvenant à se jeter dans le vide avant de s’écraser sur une barge affiliée au Pingouin. La Batmobile, lancée à pleine vitesse, parvient à éviter la chute mais reste partiellement engagée sous le tablier du pont. L’impact de la lourde structure métallique endommage la partie avant du véhicule. Contraint par cet accident mécanique imprévu, Batman et Robin, abandonne la poursuite, sidérée devant l’étendue des dégâts.
L’épisode se développe ensuite autour de la relation entre Batman et Earl Cooper, mécanicien de confiance et concepteur des modifications de la Batmobile, lequel devient la cible d’une manipulation du Pingouin, exploitant cette faille technique pour piéger le Chevalier Noir.
Analyse et portée symbolique
La Batmobile, objet iconique de l’univers de Batman, cristallise l’image d’une machine infaillible, fruit d’une ingénierie quasi surhumaine. Or, l’épisode Le super mécanicien brise cette illusion de perfection. La scène du pont levant, où le véhicule est endommagé par une simple contrainte mécanique urbaine, opère un renversement symbolique : la machine n’est pas invincible et, par extension, le héros qui l’utilise ne l’est pas davantage.
Cette vulnérabilité introduit une tension essentielle dans Batman: The Animated Series : le Chevalier Noir, malgré son aura mythique, reste un être faillible. Contrairement à certains super-héros dotés de pouvoirs surnaturels, Batman dépend d’artefacts technologiques et de son ingéniosité humaine. En fragilisant son outil principal, l’épisode met en exergue la précarité de son combat. L’endommagement de la Batmobile devient dès lors une métaphore de la fragilité du héros, susceptible d’être pris en défaut par les aléas, l’imprévu ou les limites de la matière.
Sur un plan narratif et symbolique, cet accident prépare également la confrontation avec le Pingouin. En exploitant la défaillance mécanique, l’antagoniste illustre la possibilité, pour le crime organisé, de tirer profit des failles techniques et humaines de Batman. La Batmobile endommagée incarne ici une vulnérabilité exposée, rendant visible ce que le héros s’efforce habituellement de masquer : sa dépendance à une infrastructure matérielle et à des alliés humains.
Enfin, replacée dans le cadre plus large de la série, cette séquence participe d’une écriture récurrente où Batman est représenté non pas comme une figure d’omnipotence, mais comme un être constamment mis à l’épreuve. L’endommagement de la Batmobile renvoie à une vérité fondamentale : l’efficacité du héros repose autant sur sa résilience que sur sa capacité à reconnaître et surmonter ses limites. En ce sens, la fragilisation de son véhicule ne constitue pas seulement un obstacle narratif, mais une réflexion implicite sur la condition héroïque elle-même, définie moins par l’absence de failles que par la manière de les assumer et de les dépasser.
Permettre aux élèves de découvrir les principes fondamentaux de l’électricité et de l’électronique à travers l’expérimentation, sans apport théorique préalable, en développant la curiosité scientifique et la compréhension intuitive des phénomènes électriques.
Objectifs détaillés
Identifier les éléments essentiels d’un circuit électrique simple.
Comprendre les notions de circuit fermé, polarité, tension et résistance à partir de manipulations concrètes.
Expérimenter différents montages et observer leurs effets.
Coopérer au sein d’un groupe pour résoudre un défi expérimental.
Verbaliser les observations et en tirer des conclusions collectives.
Compétences mobilisées
Observer et expérimenter.
Travailler en équipe et communiquer efficacement.
Raisonner par hypothèse et déduction.
Relier la théorie à la pratique.
Développer la motricité fine et la rigueur technique dans l’assemblage.
Programme
Mise en situation
Durée : 10 min
Objectif : Eveiller la curiosité et susciter l’engagement.
Présentation du matériel avec une explication technique sommaire.
Question-problème : « Comment faire s’allumer cette LED ? »
Les élèves formulent des hypothèses et mettent en oeuvre un montage validé par l’intervenant-e.
Expérimentation libre
Durée : 20 min
Objectif : découvrir le fonctionnement d’un circuit simple par essai-erreur.
Par petits groupes, à partir du montage réalisé précédemment, les élèves testent différentes configurations de branchement.
L’intervenant-e guide par questionnement :
« Pourquoi cela ne s’allume-t-il pas ? »
« Que se passe-t-il si on inverse la polarité ? »
Les élèves apprennent par tâtonnement et observation directe.
Structuration des connaissances
Durée : 30 min
Objectif : consolider les apprentissages issus de la manipulation.
Observer, identifier et comprendre le fonctionnement des différents systèmes présents dans le diorama, en les reliant à des applications concrètes issues du monde réel.
Programme
Étude descriptive et fonctionnelle des dispositifs techniques
Chaque système technique intégré au diorama fait l’objet d’une analyse guidée par un ensemble de questions fondamentales visant à en expliciter le fonctionnement et la finalité dans le monde réel : Qu’est-ce que c’est ? À quoi cela sert-il ? Comment cela fonctionne-t-il ?
Pont élévateur
Bras robotiques
Pont roulant
Plateforme rotative
Consoles de commande
Poste électrique
Lien entre fiction et réalité technologique
Les éléments de réponse issus de cette démarche sont ensuite replacés dans le cadre narratif de la Batcave, afin d’établir un lien entre la réalité technique et son interprétation à l’échelle. Cette mise en perspective permet de vérifier que le modèle réduit du système restitue fidèlement les principes de fonctionnement et les usages identifiés, tout en favorisant une compréhension globale, à la fois technique et contextuelle, de l’objet étudié.
Analyse de la transposition de technologies réelles dans un univers imaginaire.
Identification des principes scientifiques dissimulés derrière la mise en scène scénographique et narrative.
Expérimentation et manipulation
Pour chaque système technique, un relevé détaillé des mouvements et des mécanismes de déplacement est réalisé, afin d’en d’en mesurer la cohérence lors de la manipulation de ces dispositifs représentés dans le diorama.
Mise en pratique via les consoles de commande pour activer les différents systèmes techniques du diorama.
Observation et interprétation des interactions entre dispositifs mécaniques et numériques.
Découvrir le diorama en guidant les élèves dans la compréhension de son rôle en tant qu’outil d’exploration pédagogique et technique.
Susciter une réflexion collective et participative sur la fonction de la Batcave, envisagée non seulement comme espace narratif, mais également comme support d’analyse technologique et scientifique.
Favoriser l’appropriation progressive des notions abordées tout en développant la capacité des élèves à relier observation, compréhension technique et interprétation symbolique.
Programme
Cette séquence pédagogique propose aux élèves une initiation progressive à l’univers de la Batcave en mobilisant à la fois leur curiosité culturelle et leur esprit d’analyse technique. Elle s’appuie sur le diorama pédagogique du projet BATLab112 comme support d’observation, d’expérimentation et de réflexion collective.
Introduction à l’univers de Batman
Les élèves sont invités à découvrir le personnage de Batman à travers une approche historique et narrative :
Qui est Batman ? Quelles sont ses particularités et ses valeurs ?
La Batcave, qu’est-ce que c’est ? À quoi sert-elle dans l’univers du héros ?
La Batmobile, qu’est-ce que c’est ? Quelles sont ses fonctions et ses symboliques ?
Cette phase introductive vise à replacer ces éléments emblématiques dans un cadre culturel et technologique permettant de comprendre leur rôle au sein du récit et leur potentiel pédagogique.
Batman, un héros sans super pouvoirs : un prétexte pédagogique
À partir de la figure d’un héros dépourvu de pouvoirs surnaturels, les élèves sont amenés à réfléchir sur la place de la technologie comme facteur de dépassement et d’ingéniosité humaine.
Discussion collective sur la manière dont Batman compense l’absence de superpouvoirs par l’usage de dispositifs techniques et scientifiques.
Réflexion critique sur les limites et les risques liés à l’usage des technologies dans notre société contemporaine (surveillance, dépendance, impact environnemental).
Cette étape permet d’introduire une dimension éthique et citoyenne à l’analyse des innovations techniques.
La Batmobile : entre mécanique et imaginaire
Le diorama sert ici de support à l’étude de la Batmobile comme objet technologique complexe.
Présentation des composantes mécaniques et des principes de fonctionnement intégrés à la maquette.
Observation des systèmes techniques et de leurs représentations à l’échelle du modèle réduit.
Mise en perspective avec les enjeux réels de la maintenance, de l’innovation et de la durabilité dans le secteur automobile.
Cette séquence vise à développer la culture technologique des élèves tout en nourrissant leur imagination créative.
La dimension technologique du quotidien héroïque
En prolongement de l’étude de la Batmobile, cette phase introduit les notions de maintenance préventive et corrective, essentielles à la fiabilité des systèmes techniques.
Présentation des principes de fonctionnement des dispositifs de contrôle et d’entretien.
Sensibilisation aux métiers techniques et scientifiques liés à la conception, à la performance et à la sécurité des équipements.
Cette dernière étape permet d’ouvrir la réflexion sur les perspectives professionnelles et éducatives associées aux filières technologiques et industrielles, tout en donnant du sens à l’apprentissage à travers un ancrage concret et motivant.