Cet article de parangonnage des bras robotiques industriels analyse les principales typologies utilisées dans l’industrie afin d’alimenter la réflexion conceptuelle du projet BATLab112. Il définit le bras robotique comme un manipulateur articulé automatisé, largement employé sur les chaînes de production industrielles, notamment automobiles. L’étude distingue trois catégories majeures : robots de production en ligne, robots manipulateurs suspendus et robots de charges lourdes, en mettant en évidence leurs usages, contraintes spatiales et capacités fonctionnelles. Cette analyse comparative constitue une base de référence pour l’intégration scénographique et technique du diorama de la Batcave.… Lire la suite →
Première publication :
Dernière mise à jour :
Temps de ecture :
Mots clés :
Article précédent :
- Bras robotiques industriels : principes généraux et champs d’application
- Revue des typologies de bras robotiques industriels existants
- Typologies de bras robotiques industriels et domaines d’application
- Intérêt des robots manipulateurs suspendus et de charge lourde pour l’intégration au projet BATLab112
- Voir la suite des articles sur l’étape de parangonnage de la gestion du projet BATLab112
- Voir tous les articles de la gestion du projet BATLab112 sur la conception des bras robotiques équipant le diorama de la Batcave
Bras robotiques industriels : principes généraux et champs d’application
Les bras robotiques industriels constituent des systèmes automatisés articulés conçus pour exécuter des tâches répétitives, précises et à forte valeur ajoutée dans des environnements de production. Ils sont largement utilisés dans des secteurs tels que l’automobile, l’aéronautique, l’électronique, la logistique ou encore l’agroalimentaire, où ils contribuent à l’optimisation des processus et à l’amélioration de la qualité.
Le fonctionnement d’un bras robotique repose sur une architecture cinématique composée de plusieurs axes motorisés, généralement électriques, permettant des mouvements de rotation ou de translation. Ces axes sont pilotés par une unité de contrôle programmable qui coordonne les trajectoires, la vitesse et les efforts appliqués. Le bras est équipé d’un effecteur terminal — pince, outil de soudage, ventouse, capteur ou autre dispositif spécialisé — adapté à la tâche à réaliser. Des capteurs intégrés assurent le retour d’information, garantissant précision, répétabilité et sécurité.
L’utilisation des bras robotiques vise principalement l’automatisation des opérations telles que l’assemblage, la manutention, le soudage, la peinture ou l’inspection. Leur intégration permet de réduire la pénibilité pour les opérateurs humains, d’accroître la productivité et d’assurer une qualité constante. De plus, les évolutions récentes, notamment en robotique collaborative, favorisent une interaction sécurisée entre l’homme et la machine, renforçant la flexibilité et l’adaptabilité des systèmes industriels contemporains.
Revue des typologies de bras robotiques industriels existants
Typologies de bras robotiques industriels et domaines d’application
Robots de production en ligne
Les robots de production en ligne sont principalement intégrés au cœur des chaînes de fabrication automatisées. Ils sont conçus pour exécuter des tâches répétitives à haute cadence, telles que l’assemblage, le soudage, la peinture ou la manutention légère. Leur implantation est généralement fixe, optimisée pour un cycle de production continu et standardisé. Grâce à une programmation précise et à une forte répétabilité, ces robots contribuent à l’amélioration de la productivité, à la réduction des variations de qualité et à la sécurisation des processus industriels.
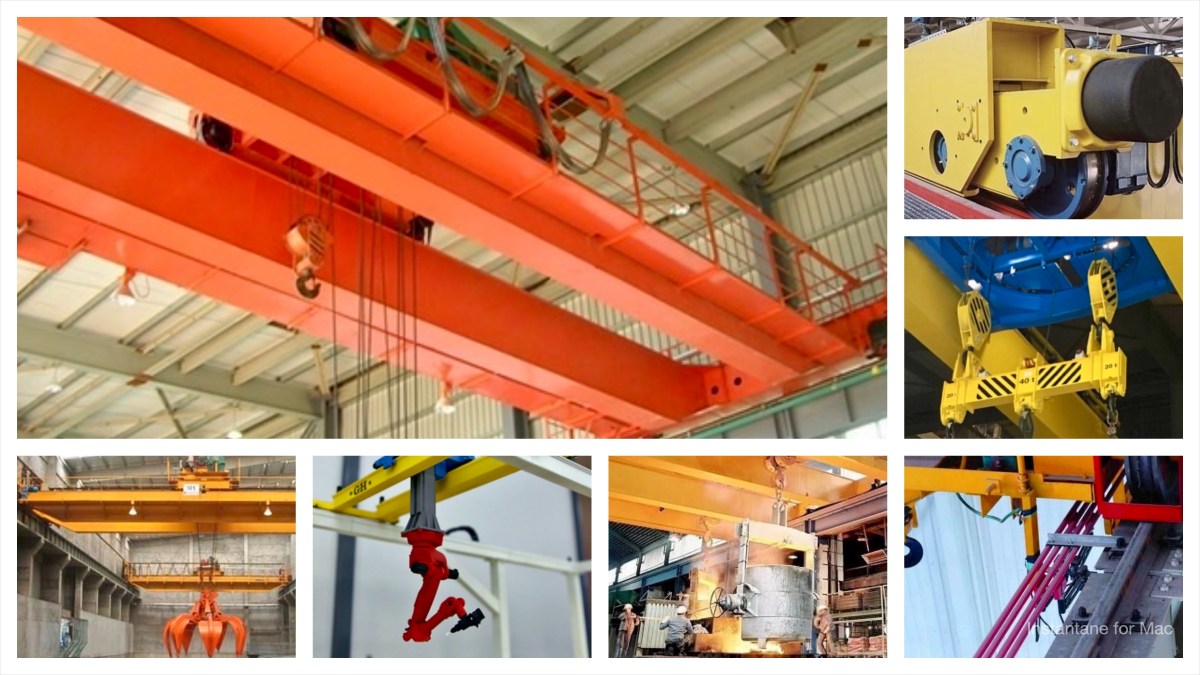
Robots manipulateurs suspendus
Les robots manipulateurs suspendus se distinguent par leur implantation en hauteur, généralement fixés à une structure porteuse, à un rail ou à un pont roulant. Cette configuration libère l’espace au sol et permet une intervention au-dessus des zones de travail. Ils sont particulièrement adaptés aux environnements contraints ou aux applications nécessitant une large zone de couverture, comme la manutention de pièces volumineuses ou l’intervention sur des ensembles complexes. Leur architecture favorise la flexibilité des trajectoires et une intégration efficace dans des systèmes industriels modulaires.
Robots de charges lourdes
Les robots de charges lourdes sont spécifiquement conçus pour la manipulation de masses importantes, pouvant atteindre plusieurs centaines de kilogrammes, voire plusieurs tonnes. Ils sont utilisés dans des secteurs tels que la sidérurgie, la construction mécanique, l’aéronautique ou l’automobile, pour le déplacement, le positionnement ou l’assemblage de composants de grande dimension. Leur conception privilégie la robustesse structurelle, la puissance des actionneurs et la fiabilité des systèmes de contrôle, garantissant des opérations sûres et précises malgré des contraintes mécaniques élevées.
Intérêt des robots manipulateurs suspendus et de charge lourde pour l’intégration au projet BATLab112
En conclusion, l’analyse des différentes typologies de bras robotiques industriels souligne le potentiel particulier des robots manipulateurs suspendus et des robots de charge lourde pour des applications complexes. Les manipulateurs suspendus offrent une grande liberté de déplacement au-dessus des zones de travail, optimisant l’espace et la flexibilité des interventions, tandis que les robots de charge lourde assurent la manipulation sécurisée de pièces volumineuses ou massives. La combinaison de ces deux caractéristiques présente un intérêt stratégique pour le projet BATLab112, en permettant l’intégration d’un système capable à la fois de se déplacer au-dessus du diorama et de manipuler des éléments lourds avec précision et sécurité.