Résumé :
Cet article présente la conception préliminaire des bras robotiques du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
Introduction
Les bras robotiques du projet BATLab112 sont entièrement conçus pour répondre aux exigences du projet. Même si il existe de nombreux modèles commerciaux de bras robotiques dits d’apprentissage, la taille de ces modèles n’est pas forcément compatible avec l’échelle de réalisation au 1:12 du projet et leur esthétique n’est jamais conforme à celle d’un robot industriel.




Présentation générale

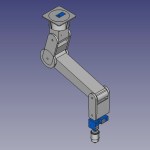
Les bras robotiques disposent de 4 degrés de liberté, autrement dit 4 articulations. Un moteur installé dans chaque articulation en assure la rotation.
Modélisation 3D
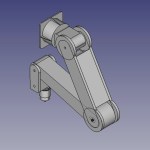
Evolution du design des versions des bras robotiques
Le design des bras robotiques est contraint par l’espace disponible dans l’atelier automatisé de la Batcave, notamment la hauteur sous plafond. A cette contrainte s’ajoute la contrainte de pouvoir accéder à tous les points de la surface de la Batmobile.



FreeCAD

La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Vues de détails
Base

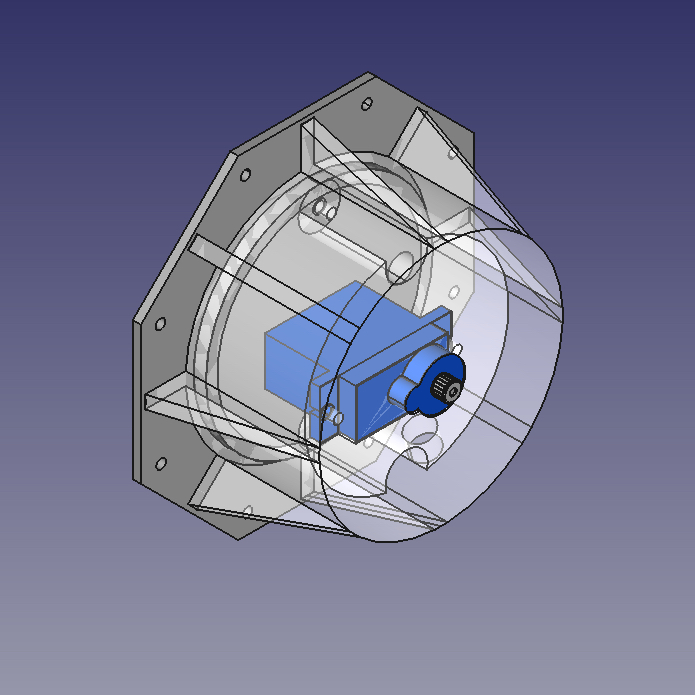
La base est la pièce qui assure la fixation du bras robotique sur le pont roulant bipoutre. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 1/2 de l’épaule.
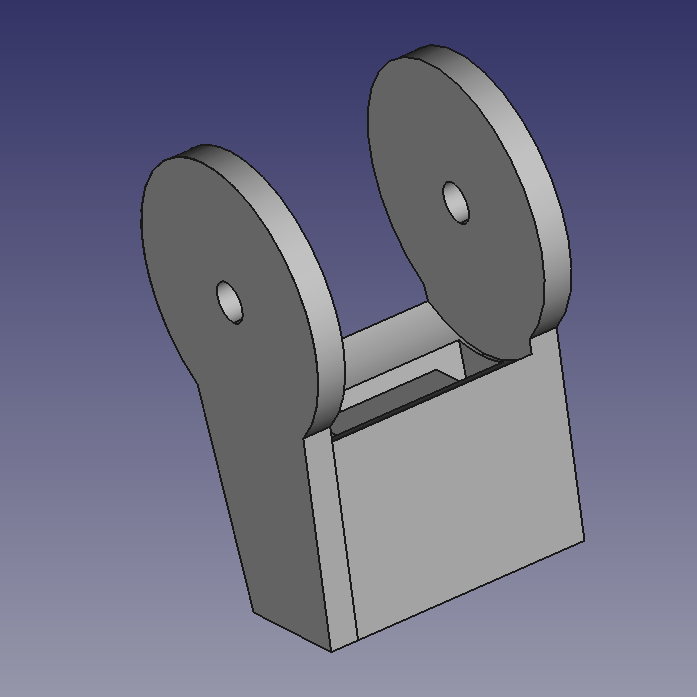
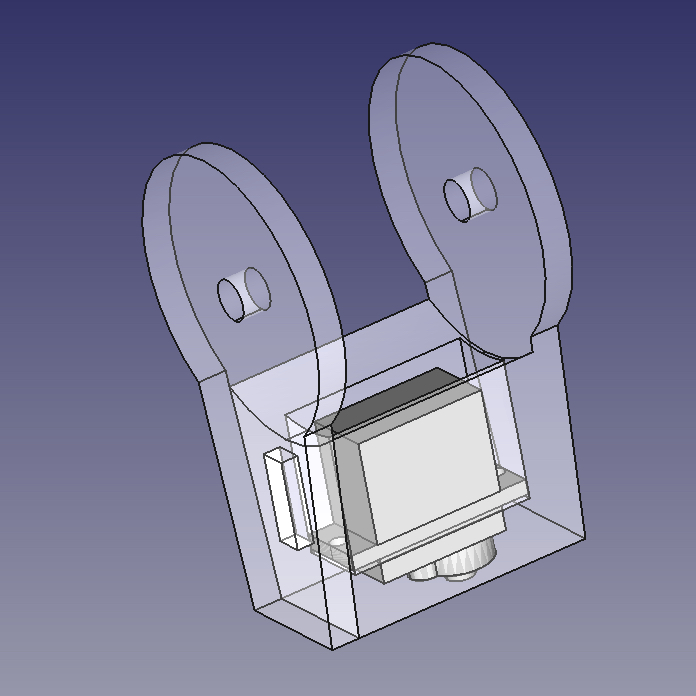
Epaule


La pièce constituant l’épaule du bras robotique se fixe sur la base. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 2/2 de l’épaule.
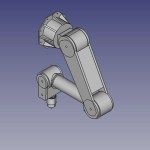
Bras et Avant-bras
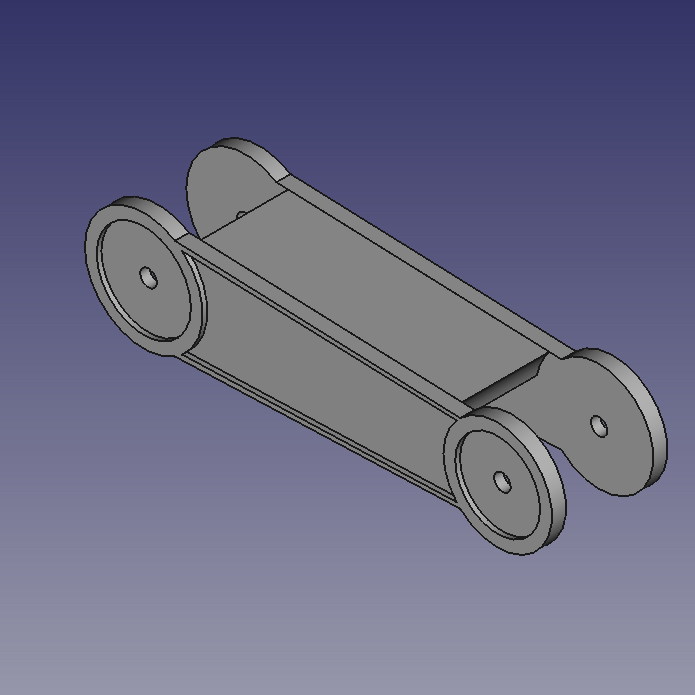

Coude


La pièce qui assure la rotation 1/1 du coude intègre le Troisième servomoteur.
Poignet
La pièce constituant le poignet intègre un éventuel cinquième servomoteur dont la présence dépendra du design final du préhenseur.
Préhenseur
La conception du préhenseur reste à faire. L’objectif est de concevoir ( ou d’utiliser un concept existant ) un préhenseur capable de de s’équiper de différents outils spécialisés.
Calcul de masse
Le calcul de la masse maximale de chacune des composantes mécaniques du bras ; épaule, bras, avant-bras, permet de sélectionner le matériau adéquat pour la fabrication de ces pièces et de les dimensionner plus précisément ; épaisseur, densité …
Configurations de calcul
Configuration n°1 :

Cette première configuration présente des conditions favorables de ce calcul : Le bras à l’horizontal et l’avant bras vertical. Le poids équivalent aux poids de ces deux pièces (P) s’exerce à une distance restreinte du point de rotation. Par conséquent, le couple exercé par le moteur de l’épaule est plus faible que dans la deuxième configuration.
Configuration n°2 :

Cette configuration présente des conditions défavorables de ce calcul : le bras et l’avant bras sont tendus à l’horizontale. Le poids équivalent aux poids des deux pièces, s’exerce à une distance plus grande que dans la première configuration. Par conséquent, le couple exercé par le moteur de l’épaule est plus important.
Remarque : Même si la deuxième configuration reste improbable compte tenu de l’implantation des bras robotiques dans le diorama, elle permet une estimation des valeurs limites.
Données et approximations pour ce calcul
Le bras et l’avant-bras du bras robotique ont la même longueur (L = 15 cm).
Le bras et l’avant-bras du bras robotique ont la même masse (m) répartie de manière homogène.
La masse du poignet ( et du préhenseur ) sont négligées.
Caractéristiques techniques d’un servomoteur
Le site affiche un couple sous 4,8V de 1kg/cm (voir extrait). L’unité utilisée n’est pas conforme avec celle d’un couple qui devrait être 1kg.cm. Nous utiliserons cette valeur pour la suite des calculs.
Calculs
Configurations 1 :

C = L/2 x m + L x m
C = (L/2 + L) x m
C = 3/2L x m
m = C / 3/2L
m = 1 / (3/2×15)
m = 44g
Configuration 2 :

C = L/2 x m + 3/2L x m
C = (L/2 + 3/2L) x m
C = 2L x m
m = C / 2L
m = 1 / (2×15)
m = 33g