
Cet article présente la deuxième partie de la conception détaillée, du pont élévateur à l’échelle 1/12, du diorama de la Batcave du projet BATLab112. Cette deuxième partie porte plus particulièrement sur les quatre plateformes moteurs et leur raccordement électrique.
Introduction
Cet article est la suite de la conception détaillée de la structure mécanique du pont élévateur. L’objectif est à présent de concevoir le design mécanique des 4 plateformes de motorisation des 4 axes du pont élévateur.
Pour plus d’infos :
Benchmarking
Pour respecter l’objectif de réalisme du diorama pédagogique du projet BATLab112, le design des plateformes des moteurs du pont élévateur du diorama est directement inspiré de plateformes réelles.
Le type d’équipement représentée sur la photo est une pompe à eau horizontale électrique très largement utilisé dans l’industrie.
source : modopump.com

Présentation générale
Conception mécanique
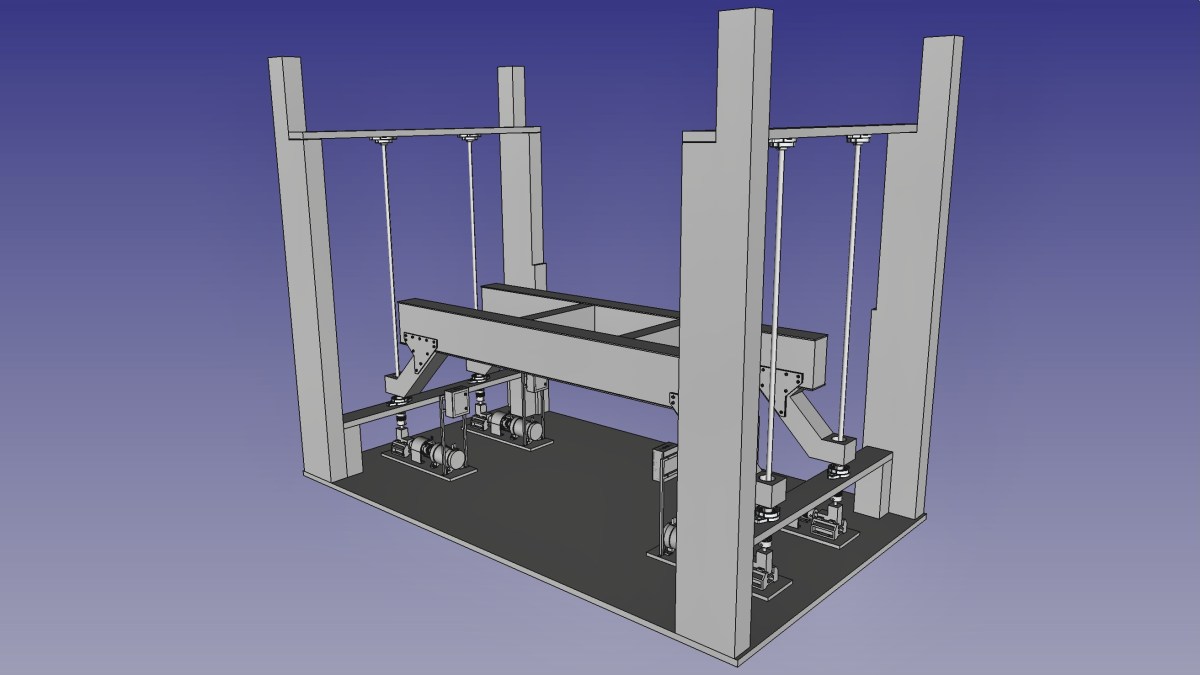
La motorisation des axes du pont élévateur se compose de 4 plateformes identiques, équipées chacune d’un moteur à courant continu couplé à une boîte de renvoi d’angle à 90°. Sur les 4 axes de couplage, une roue codeuse permet à un capteur optique de mesurer la vitesse de rotation du moteur et ainsi de contrôler la vitesse de déplacement vertical du pont élévateur.


Sourcing
Pour définir le design final de cet ensemble et s’assurer de son intégration mécanique dans le diorama, les composants sont sélectionnés dans la phase de conception détaillée en fonction de leurs dimensions et de leurs caractéristiques techniques.

Caractéristiques techniques
- Alimentation . : 12V CC
- Puissance …… : 7W
- Vitesse : 2000 tr/min
Sourcing
Caractéristiques techniques
- Alimentation : 3,3V à 5V CC
- Sortie : Numérique
- Capteur : Infrarouge
Sourcing
Caractéristiques techniques
- Réduction . : 1:1
- Engrenage : Conique
- Matière : Nylon et Acier
Sourcing
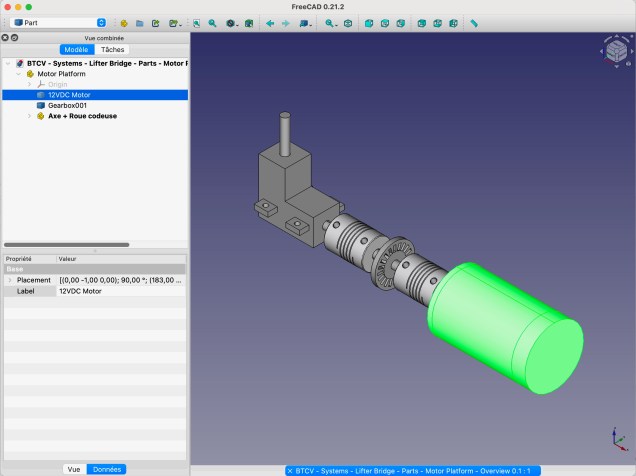
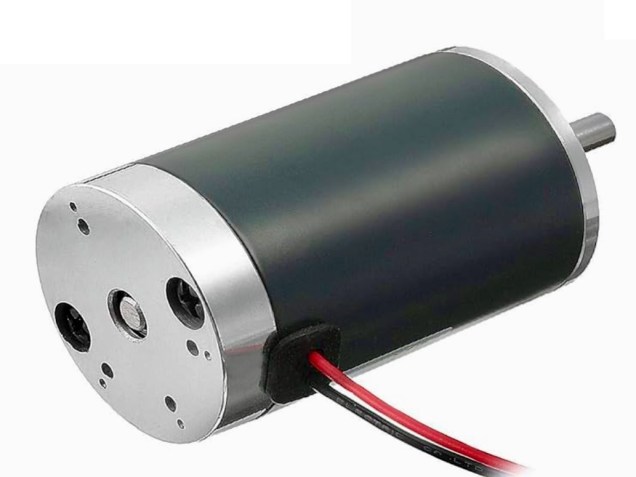
Moteur à courant continu
Ce modèle de moteur est sélectionné pour ses dimensions mécaniques compatibles avec le rendu réaliste imposé par l’échelle 1/12 du diorama, mais aussi pour ses caractéristiques électriques garantissant le bon fonctionnement final du système. La tension d’alimentation en 12V, associée à une vitesse de rotation nominale élevée, laissent envisager un couple mécanique satisfaisant après réduction de la vitesse de rotation.
Roue codeuse et capteur optique
Ce capteur est sélectionné pour la simplicité de sa mise en œuvre, son encombrement compatible avec l’échelle du diorama et un signal de sortie numérique. Comme le montre la photo, ce modèle est souvent vendu par petit lot de pièces.
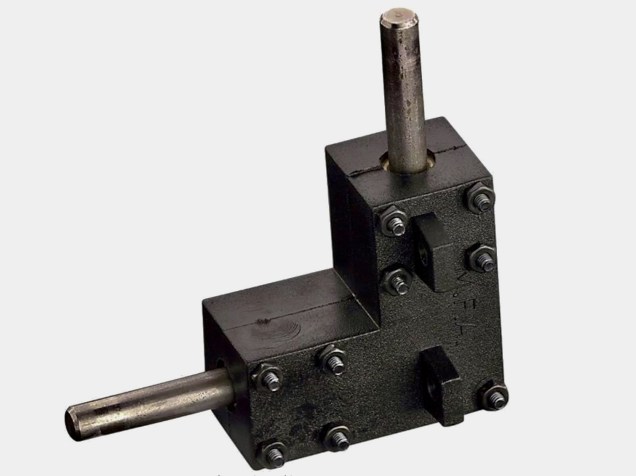
Engrenage angulaire
Le choix de ce type d’engrenage est relativement restreint sur un marché grand public autorisant des commandes à l’unité. Ce modèle d’engrenage angulaire est sélectionné pour son rapport de réduction de 1:1 mais aussi pour son design mécanique robuste, équipé de pattes de fixation.
Conception électrique
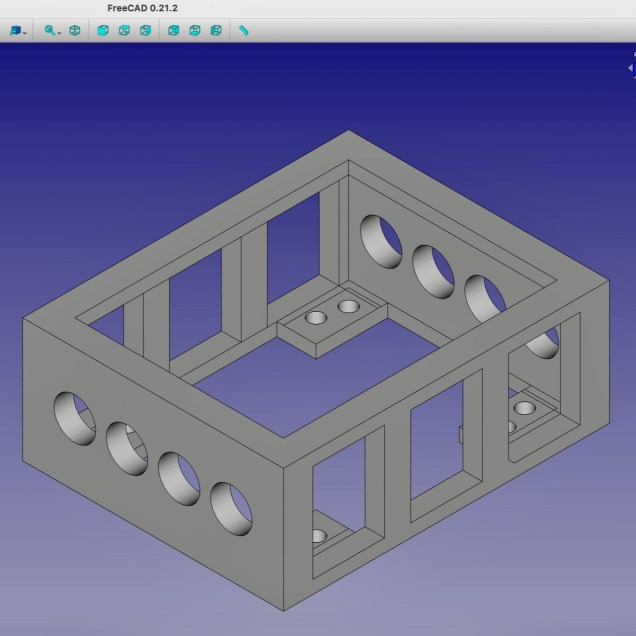
La conception électrique porte ici essentiellement sur l’armoire électrique qui doit assurer le raccordement de la tension d’alimentation des moteurs ainsi que le signal de sortie de la roue codeuse. Pour concevoir le design mécanique de cette armoire électrique, ainsi que son intégration générale sur la plateforme, il est nécessaire de penser auparavant sa conception électrique
L’objectif de reproduction réaliste du câblage d’une telle armoire n’est pas envisageable compte tenu des contraintes d’intégration des composants nécessaires. Cependant, les armoires électriques du pont élévateur vont faire l’objet d’une évolution dans leur design, par rapport à la conception des précédentes armoires électriques du diorama du projet BATLab112.

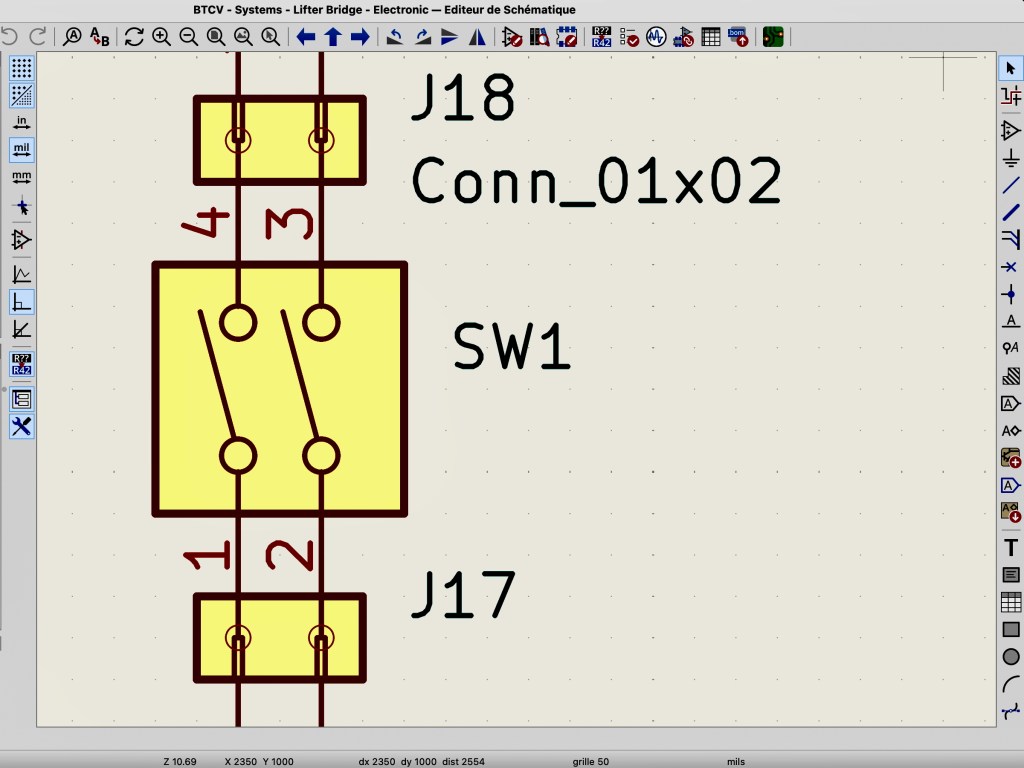
Sectionneur électrique
Le premier objectif est de remplacer le bloc de jonction, présent dans les premières armoires électriques du diorama, pour le raccordement électrique d’alimentation des moteurs, par un système à base de switches et de deux connecteurs, faisant office de sectionneur électrique comme illustré sur l’extrait du schéma ci-contre.
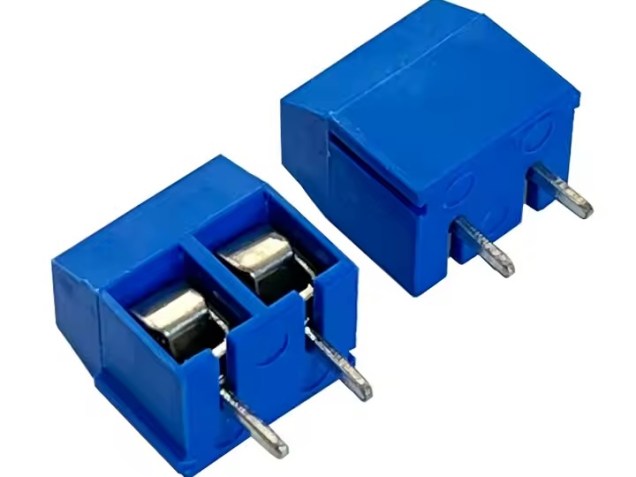
Bornier de raccordement
Le remplacement du bloc de jonction contraint aussi le câblage de la roue codeuse de chaque moteur. Elles seront donc raccordées via un connecteur à trois contacts, faisant office de bornier électrique.

Sourcing


Caractéristiques techniques
- Tension ….. : 300V CC
- Intensité … : 10A
- Broche …… : 2
Sourcing
Caractéristiques techniques
- Tension ….. : 300V CC
- Intensité … : 10A
- Broche …… : 3
Sourcing
Modélisation 3D
FreeCAD
Le projet BATLab112 utilise la version 0.21.2 de FreeCAD dans le cadre de la conception préliminaire et détaillée du diorama de la Batave à l’échelle 1/12.

La modélisation du poste électrique équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Modélisation des pièces mécaniques

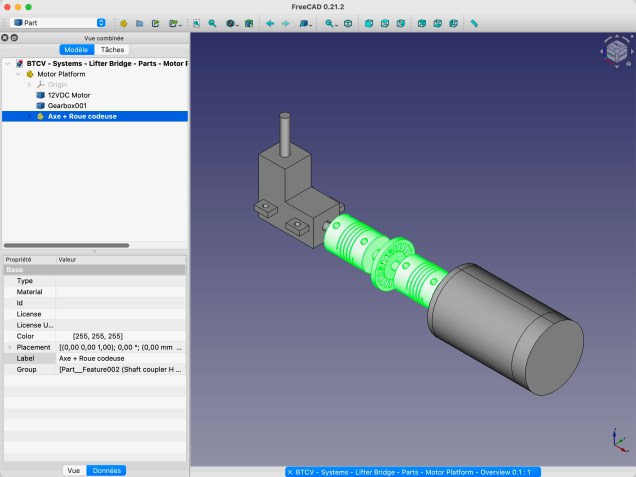
Contrairement à d’autres composants utilisés dans les systèmes industriels de la Batcave, aucun modèle 3D n’est disponible librement pour chacun dses composants de la plateforme ; moteur, roue codeuse, engrenage à renvoi d’angle. Par conséquent, leur modélisation 3D est réalisée avec le logiciel FreeCAD pour définir dans un premier temps leur design général. La prise en compte de leurs dimensions externes permet de présenter leurs intégration sur une plateforme.
Modélisation des composants électroniques
Les modèles 3D des composants électroniques sont disponibles dans la bibliothèque de GrabCAD

Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.


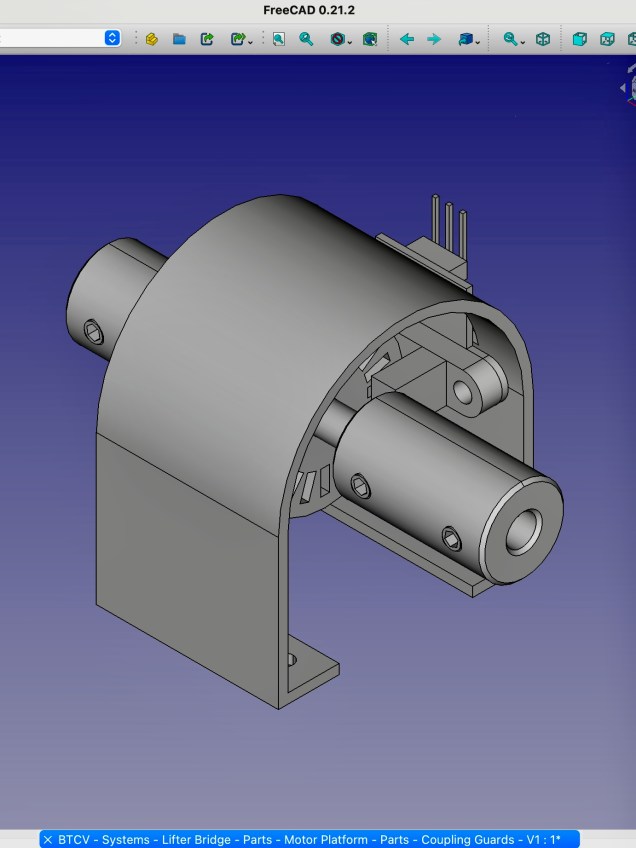
Conception détaillée de la plateforme
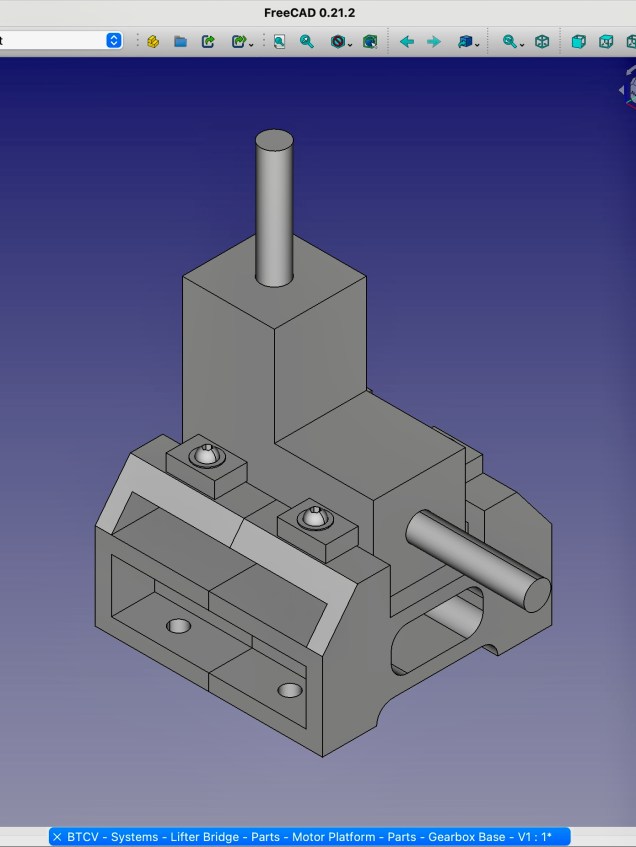
La modélisation complète et détaillée d’une plateforme nécessite l’intégration d’éléments complémentaires, comme le coupleur monté sur l’axe vertical en sortie de l’engrenage à renvoi d’angle, le portique supportant l’armoire électrique et aussi la base d’accueil et de fixation de tous les composants.

Vue d’ensemble


Prochaine étape
La première version de la conception détaillée de tous les composants mécaniques du pont élévateur est achevée. La prochaine étape consiste à concevoir et réaliser le prototype de l’électronique de commande.








