
Cet article présente le premier prototype des plateformes de motorisation des axes du pont élévateur à l’échelle 1/12, du diorama de la Batcave du projet BATLab112.
Introduction
L’article précédent celui-ci, présente la conception détaillée de la plateforme de motorisation des axes du pont élévateur. Cet article se focalise sur le design des composants de la plateforme et leurs dimensionnement pour aboutir à leurs modélisation 3D sur FreeCAD. Cette modélisation permet notamment de s’assurer de la bonne intégration du design général des plateformes de motorisation dans le diorama de la Batcave.
Pour plus d’infos :

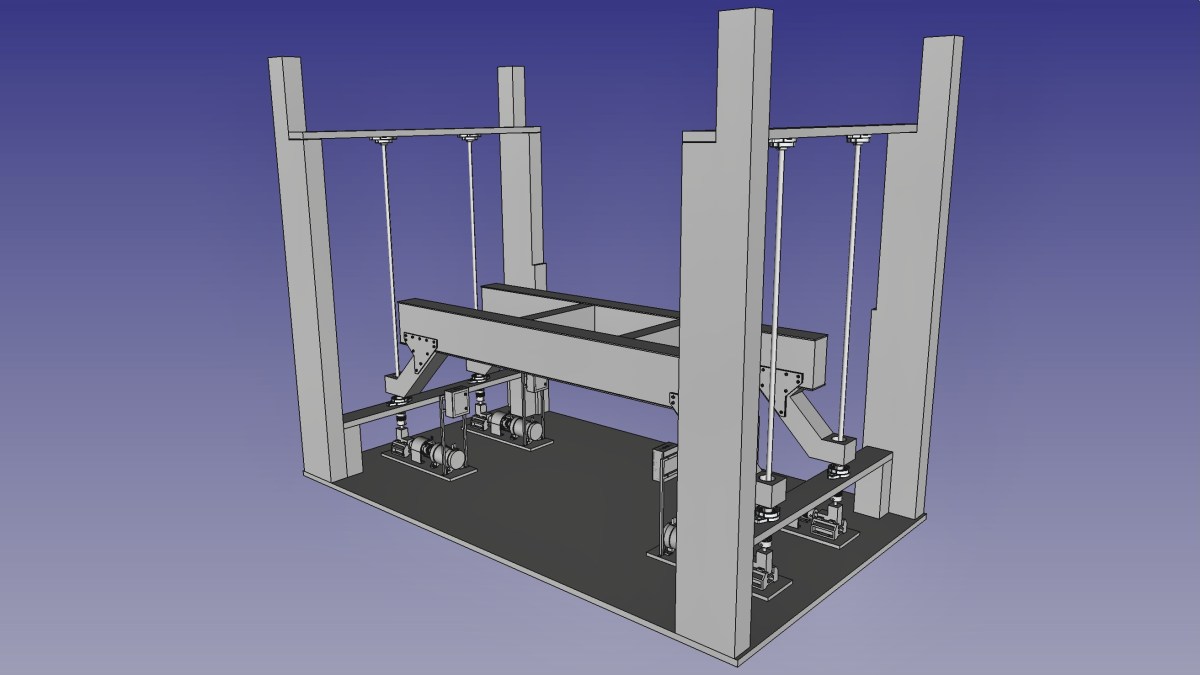
Présentation générale
Pour rappel, le fonctionnement de ces plateformes de motorisation des axes du pont élévateur, repose sur trois composants actifs : un moteur, une roue codeuse et un engrenage à renvoi d’angle. Comme ces composants ont déjà été spécifiés dans l’article de conception détaillée, il s’agit ici, plus particulièrement, de focaliser sur la fabrication des pièces nécessaires pour assembler ces composants actifs sur la plateforme.
Sourcing
Le sourcing des composants actifs et des pièces mécaniques est réalisé à partir d’une plateforme de ventes en ligne. Ce choix est essentiellement dicté par un objectif de limiter le nombre de fournisseur, mais aussi de permettre une centralisation des commandes et ainsi d’envisager des économies d’échelle, notamment sur les frais de livraison.




Pour plus d’informations concernant les caractéristiques de ces composants, voir l’article sur la conception détaillée des plateformes moteurs :

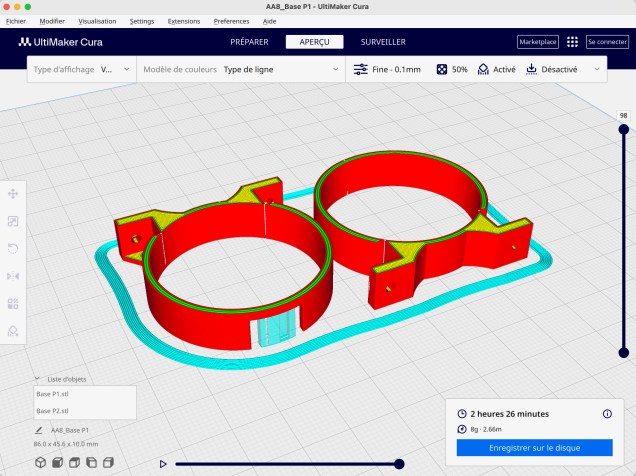
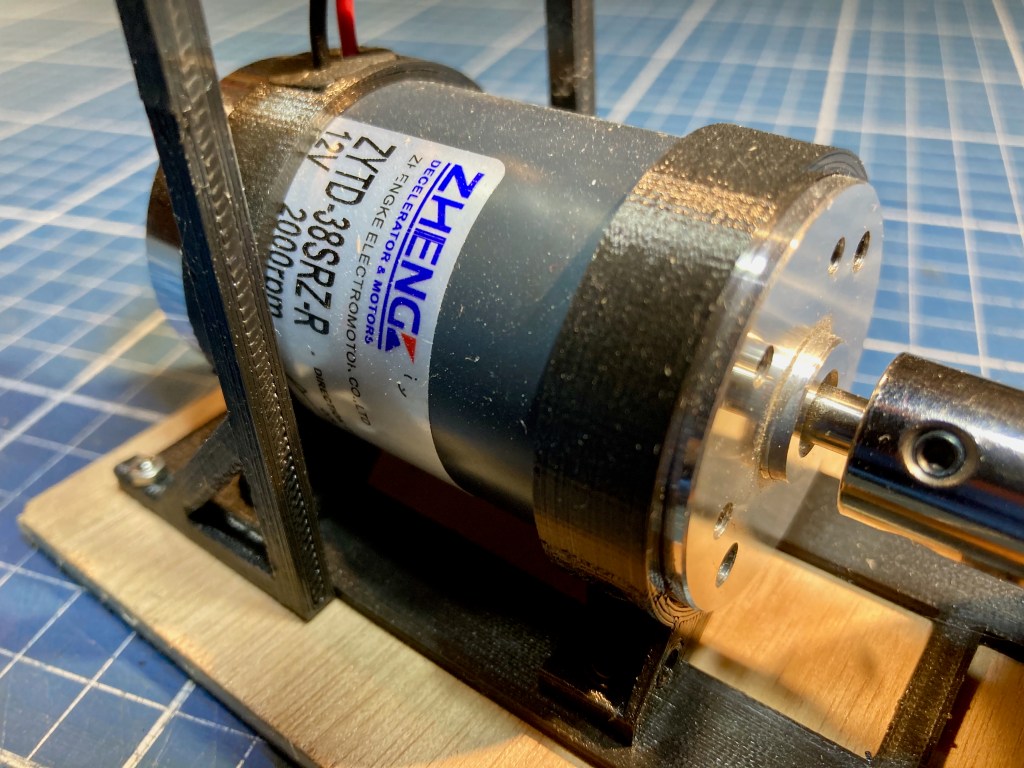
Support moteur
Le support moteur se compose de deux parties réalisées par impression 3D. Le design de ces deux parties est très similaire, la seule différence réside dans l’espace dédié au passage des câbles électriques sur la partie arrière. Chaque partie de ce support est montée sur le moteur par ajustement. La fixation de l’ensemble sur la plateforme est réalisé par boulonnage.


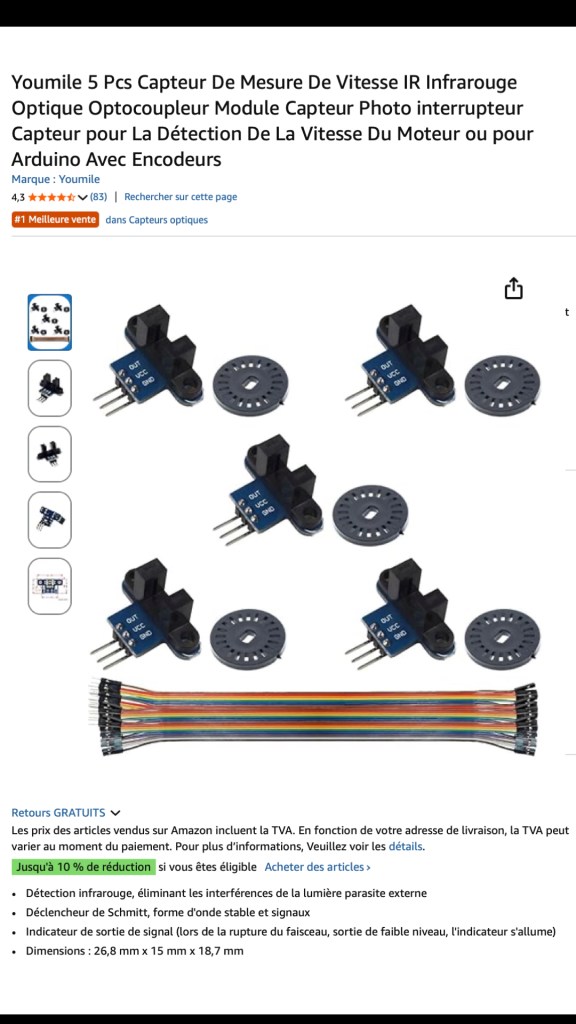
Support du capteur de la roue codeuse
Le capteur de vitesse se compose d’une roue codeuse et d’un capteur photocoupleur fixe qui convertit la vitesse de rotation de la roue codeuse en signal électrique.

Le support du capteur photocoupleur se compose d’une seule pièce réalisée par impression 3D. Ce support assure le maintien du capteur en position et assure la fixation de l’ensemble sur la plateforme, par boulonnage.



Support de l’engrenage à renvoi d’angle
Ce support se compose de deux parties, réalisées par impression 3D, qui s’assemblent par emboitement. La forme de la partie supérieure du support assemblé est conçue pour maintenir latéralement l’engrenage à renvoi d’angle qui est fixé ensuite par boulonnage. Le support assure la fixation de l’ensemble sur la plateforme par boulonnage.




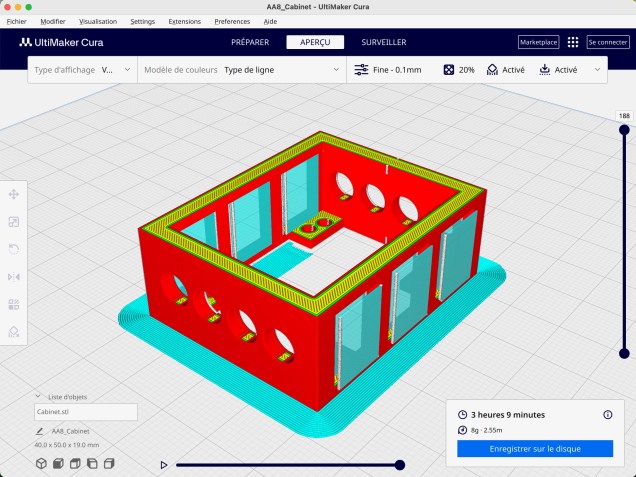
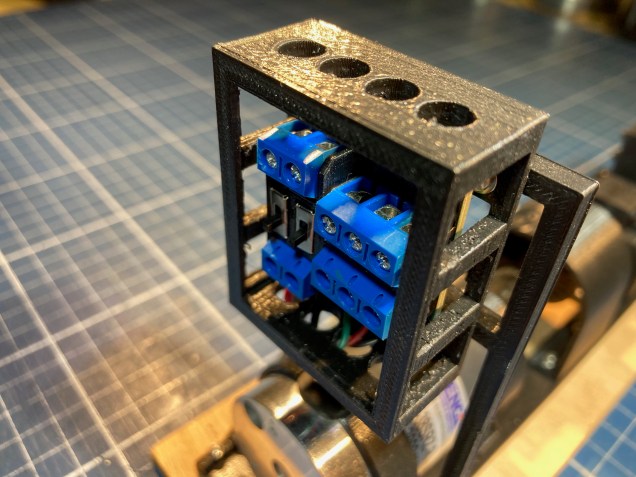
Armoire électrique
La phase de conception détaillée de la plateforme a apportée une modification au design de la structure des petites armoires électriques par rapport à celles déjà existantes sur le diorama. Ce nouveau design permet de prendre en compte le remplacement du bloc de jonction, initialement présent dans l’armoire, par un mini PCB. Cette structure est réalisée par impression 3D.
Pour plus d’informations :


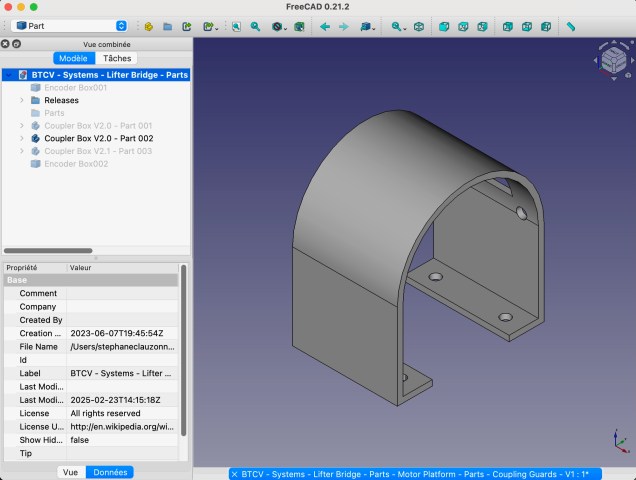
Portique de l’armoire électrique
Le portique permet le montage par boulonnage de l’armoire électrique de la plateforme moteur. Le portique est réalisé par impression 3D.




Modélisation 3D

La modélisation du poste électrique équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Impression 3D


L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
Prochaine étape
La première version de la conception détaillée de tous les composants mécaniques du pont élévateur est achevée. La prochaine étape consiste à concevoir et réaliser le prototype de l’électronique de commande.








