Dans la gestion de projets technologiques, la définition des besoins constitue une étape fondamentale. Elle requiert une analyse approfondie de l’environnement dans lequel s’inscrit le projet afin d’identifier et de comprendre les contraintes spécifiques liées à ce contexte. Dans le cadre du projet BATLab112, l’environnement naturel formé par la grotte abritant la Batcave et la colonie de chauves-souris qui l’occupe revêt une importance particulière, non seulement en tant qu’élément du mythe de Batman, mais aussi en tant qu’écosystème vivant devant être pris en considération dans toute démarche de conception.… Lire la suite →
Première publication :
Dernière mise à jour :
Temps de lecture :
Mots clés :
Article précédent :
La gestion du projet BATLab112
Le développement du projet BATLab112 est l’occasion d’une première approche pédagogique de la notion de gestion de projet.
Voir l'article …- Introduction
- Entre mythe et réalité biologique – Contraintes d’un espace iconique
- Enjeux techniques et environnementaux de la Batmobile dans l’environnement souterrain confiné de la Batcave
- Le réacteur de propulsion de la Batmobile : atouts opérationnels et limites contextuelles
- Contraintes acoustiques liées à l’utilisation du réacteur de la Batmobile en milieu souterrain
- Impacts thermiques de la propulsion par réacteur de la Batmobile dans un environnement confiné
- Conséquences des émissions de CO₂ de la Batmobile sur la qualité de l’air de la Batcave
- Synthèse des limites opérationnelles d’une propulsion unique pour la Batmobile
- Vers une motorisation alternative de la Batmobile adaptée aux contraintes de la Batcave
- Motorisation électrique de la Batmobile : Conséquences pour la conception de l’atelier de la Batcave
- Des articles complémentaires sur la définition des besoins du projet BATLab112
La Batcave et la symbolique fondatrice de la chauve-souris
À partir de 1948, la Batcave est représentée comme une cavité naturelle située sous le manoir Wayne et habitée par une colonie de chauves-souris. C’est à la suite d’un épisode survenu dans le manoir, au cours duquel l’une de ces chauves-souris pénètre dans la demeure, que Bruce Wayne interprète cet événement comme un signe et décide d’adopter la chauve-souris comme emblème de son identité de justicier.
Mais au-delà du symbole qu’elles représentent, la présence de chauves-souris dans la Batcave est d’autant plus importante pour Batman qu’elles sont aussi des alliées très utiles, mobilisables grâce à un émetteur, dans des situations difficiles. L’effet de surprise et de peur, qui suivent leurs apparitions, crée une diversion qui permet à Batman de s’éclipser furtivement.
Batman: Year One – L’irruption d’une chauve-souris comme symbole révélateur
Cet animé issu de l’univers de fiction de Batman, et diffusé en 2012, retrace les débuts de la carrière de Bruce Wayne en tant que justicier masqué, parallèlement à l’ascension de Jim Gordon au sein du commissariat de Gotham. L’intrigue met particulièrement en lumière l’évolution psychologique de Bruce Wayne, qui, après avoir tenté de rendre la justice dans les rues en tant qu’individu anonyme, se retrouve gravement blessé et remet en question la légitimité de ses actions. Plongé dans un profond désarroi, il revit le traumatisme lié à la mort de ses parents. C’est dans ce contexte de vulnérabilité émotionnelle qu’une chauve-souris fait irruption de manière inattendue dans le manoir familial, se posant face à lui et symbolisant le tournant décisif de sa vocation en tant que protecteur de Gotham.
L’irruption de la chauve-souris constitue un élément catalyseur dans la trajectoire de Bruce Wayne, agissant à la fois comme un symbole de peur et d’inspiration. Face à cette apparition, il prend conscience de la nécessité d’adopter une identité capable de canaliser sa détermination et sa colère tout en instillant la crainte parmi les criminels. Cette prise de conscience marque le point de départ de sa transformation en Batman, justicier nocturne opérant dans l’ombre. L’épisode souligne également l’articulation entre le trauma personnel et la construction de l’identité héroïque : la peur et le deuil, loin de paralyser Bruce Wayne, deviennent des moteurs de sa volonté de protéger Gotham, conférant à son futur rôle une dimension à la fois psychologique et symbolique essentielle à sa légitimité en tant que défenseur de la ville.
Le retour symbolique des chauves-souris dans la Batcave – La Cour des Hiboux
Dans cet arc narratif des comics consacrés à Batman, le protagoniste est confronté à une série de meurtres apparemment inexpliqués qui l’entraînent dans une enquête complexe visant à identifier un assassin énigmatique, reconnaissable à son apparence évoquant un hibou. L’investigation révèle progressivement que la prochaine victime désignée par ce meurtrier n’est autre que Bruce Wayne lui-même, plaçant ainsi Batman face à une menace directe visant son identité civile.
Au fil de ses recherches, Batman met au jour l’un des mythes urbains les plus anciens de Gotham City, longtemps considéré comme une simple légende : l’existence réelle d’une organisation secrète et influente, connue sous le nom de la Cour des Hiboux. Cette société occulte, enracinée dans l’histoire même de la ville, apparaît comme détentrice de secrets profondément inquiétants et exerce une emprise clandestine sur Gotham depuis des générations.
Parvenant dans un premier temps à déjouer les manœuvres de la Cour, Batman suscite la riposte de l’organisation, qui lance une offensive massive contre lui en déployant une armée d’assassins jusque dans la Batcave. Grâce au soutien logistique et stratégique d’Alfred, Batman réussit néanmoins à neutraliser ses assaillants. La conclusion de cet affrontement revêt une forte dimension symbolique : le retour des chauves-souris dans la Batcave marque la défaite des Hiboux et consacre la victoire de Batman sur cette menace ancestrale.
Entre mythe et réalité biologique – Contraintes d’un espace iconique
Si en 1948, les activités de Batman dans ce milieu naturel ne suscitait pas de question, dans l’approche contemporaine et plus réaliste imposée par la méthode de gestion du projet BATLab112, cet environnement est un élément déterminant. Ainsi, les impacts d’une activité humaine dans la Batcave sont à prendre en compte pour préserver la présence de ces chiroptères faisant partie intégrante du mythe de Batman. Car si les chauves-souris ne sont pas dérangées par la seule présence de l’homme, elles le sont par les conséquences de son activité.
Les effets de l’éclairage artificiel
L’intégration de l’éclairage est indispensable pour rendre un espace souterrain praticable. Cependant, l’éclairage artificiel modifie les cycles lumineux naturels, ce qui peut perturber les rythmes biologiques des chauves-souris. Des études indiquent que les chiroptères tendent à éviter les zones éclairées et que l’intensité ainsi que la nature du spectre lumineux influencent leurs réponses comportementales. Par conséquent, il est souhaitable de limiter la pollution lumineuse en orientant préférentiellement l’éclairage vers les zones nécessaires à l’activité humaine tout en évitant la diffusion large, et en privilégiant des solutions indirectes adaptées.
Les contraintes acoustiques
Les activités humaines génèrent inévitablement des émissions sonores. Dans le cas étudié, l’usage d’outils, de dispositifs mécaniques ou de moteurs peut produire des niveaux sonores élevés susceptibles d’affecter négativement la colonie de chauves-souris. Comme chez la plupart des animaux sauvages, des bruits soudains ou intenses peuvent provoquer un comportement de fuite. Ainsi, la conception spatiale doit intégrer des mesures de réduction et de confinement acoustique, de manière à limiter l’exposition des chiroptères aux nuisances sonores tout en préservant leur liberté de circulation.
L’étude des effets des technologies employées met en évidence des enjeux supplémentaires liés à l’intégration d’équipements motorisés, notamment la Batmobile. L’utilisation d’un réacteur à propulsion dans un milieu confiné soulève plusieurs problèmes : niveaux sonores élevés, émission de chaleur susceptible de déséquilibrer l’écosystème thermique de la grotte, et production de dioxyde de carbone pouvant altérer la composition de l’air. Ces facteurs exigent une réflexion approfondie afin de développer des solutions alternatives ou complémentaires, telles que des motorisations électriques permettant des déplacements silencieux et sans émissions directes, tout en répondant aux impératifs de discrétion et de sécurité.
Conclusion
L’analyse de l’environnement iconique du projet BATLab112 illustre l’importance de prendre en compte, dès les premières phases de conception, les interactions entre l’activité humaine et les composants naturels d’un contexte donné. Au-delà des considérations esthétiques ou symboliques, des facteurs tels que l’éclairage, l’acoustique et les impacts des technologies employées doivent être intégrés de manière systématique. Cette approche permet non seulement de répondre aux besoins fonctionnels, mais aussi de garantir la durabilité et la cohérence écologique de l’intervention, même dans un cadre fictionnel.
L’aménagement de la Batcave du projet BATLab112 doit proposer une architecture assurant la pérennité de la colonie de Chauves-souris dans la Batcave. Cette architecture doit notamment permettre de contenir les émissions sonores issues des activités de Bruce Wayne et Alfred Pennyworth et autoriser l’utilisation d’éclairage. Ces contraintes imposent donc une architecture conçues à base d’espaces clos mais sans pour autant nuire à la libre circulation des chiroptères.
Enjeux techniques et environnementaux de la Batmobile dans l’environnement souterrain confiné de la Batcave
Le réacteur de propulsion de la Batmobile : atouts opérationnels et limites contextuelles
L’une des caractéristiques récurrentes de la Batmobile, attestée dès 1966, réside dans l’intégration d’un grand nombre d’équipements et de dispositifs technologiques. Parmi ceux-ci, un élément s’est progressivement imposé comme une signature emblématique du véhicule : le réacteur arrière, destiné à assurer une propulsion à très grande vitesse. Cet équipement constitue un avantage déterminant dans le cadre de déplacements longue distance ou de poursuites à haute intensité, en permettant à la Batmobile d’atteindre des vitesses de pointe élevées malgré une masse importante, résultant notamment de la présence de blindages et de systèmes embarqués complexes. Toutefois, l’emploi d’un tel mode de propulsion pour les phases d’entrée et de sortie de la Batcave apparaît inadapté, tant au regard des contraintes spatiales de l’environnement souterrain que des impacts potentiels associés à ce type de motorisation.
Contraintes acoustiques liées à l’utilisation du réacteur de la Batmobile en milieu souterrain
La turbine d’un réacteur génère des émissions sonores de très forte intensité, dont le niveau peut atteindre des valeurs de l’ordre de 150 dB. L’émission de telles ondes acoustiques dans un environnement souterrain confiné, tel que la Batcave, induirait des phénomènes de réverbération et de résonance particulièrement marqués. Ces effets acoustiques seraient susceptibles de perturber gravement la colonie de chauves-souris présente, dont les comportements reposent en grande partie sur l’écholocation. Par ailleurs, la répétition de sollicitations acoustiques de forte amplitude pourrait, à plus long terme, contribuer à une fragilisation de la structure géologique de la cavité, en raison des contraintes vibratoires exercées sur le milieu rocheux.
Impacts thermiques de la propulsion par réacteur de la Batmobile dans un environnement confiné
Par ailleurs, le dégagement thermique particulièrement élevé associé au fonctionnement d’un tel dispositif de propulsion présenterait des risques significatifs au contact d’éléments organiques, qu’il s’agisse de la végétation, de la faune cavernicole, notamment les chauves-souris, ou des occupants humains de la Batcave. Au-delà de ces risques immédiats, une dissipation d’énergie thermique répétée et régulière, correspondant à la fréquence des phases d’entrée et de sortie de la Batmobile, entraînerait une élévation notable de la température moyenne de la cavité. Une telle modification des conditions thermiques pourrait alors provoquer un déséquilibre profond des équilibres physico-chimiques de l’environnement souterrain, compromettant la stabilité de l’écosystème de la grotte.
Conséquences des émissions de CO₂ de la Batmobile sur la qualité de l’air de la Batcave
Enfin, en ce qui concerne les émissions de dioxyde de carbone, un réacteur constitue un système de conversion énergétique transformant l’énergie chimique contenue dans un carburant, généralement le kérosène, combinée à un comburant tel que l’air ambiant, en énergie cinétique destinée à produire une force de propulsion. Ce processus de combustion s’accompagne inévitablement de rejets de dioxyde de carbone (CO₂). Dans un environnement confiné tel qu’une grotte, l’accumulation de ces émissions serait susceptible de modifier significativement la composition chimique de l’atmosphère intérieure. Une telle altération pourrait, à terme, compromettre la qualité de l’air et rendre celui-ci impropre à la respiration humaine, tout en affectant plus largement l’équilibre de l’écosystème cavernicole.
Synthèse des limites opérationnelles d’une propulsion unique pour la Batmobile
La présente analyse ne remet pas en cause la pertinence de l’intégration d’un réacteur de propulsion sur la Batmobile, lequel demeure un élément central de ses capacités opérationnelles. Elle vise en revanche à mettre en évidence le fait que ce dispositif constitue, dans la majorité des représentations, l’unique mode de propulsion du véhicule, alors même qu’il présente des limitations significatives dans certains contextes d’utilisation. En particulier, les contraintes acoustiques, thermiques et atmosphériques précédemment identifiées démontrent que l’usage d’un réacteur n’est pas compatible avec les phases d’entrée et de sortie de la Batcave. Il apparaît dès lors nécessaire d’envisager un mode de propulsion complémentaire, spécifiquement adapté aux exigences de discrétion, de sécurité et d’absence d’émissions, propres à un environnement souterrain confiné.
Vers une motorisation alternative de la Batmobile adaptée aux contraintes de la Batcave
Les limites identifiées liées à l’usage exclusif d’une propulsion par réacteur au sein d’un environnement souterrain confiné conduisent à envisager l’intégration d’un mode de propulsion alternatif pour la Batmobile, spécifiquement adapté aux phases d’entrée, de sortie et de circulation interne dans la Batcave. À cet égard, les évolutions récentes observées dans le secteur des véhicules industriels lourds apportent des éléments de réponse crédibles. Les motorisations électriques associées à des systèmes de batteries de forte capacité démontrent désormais leur aptitude à déplacer des masses supérieures à quatre tonnes, tout en offrant des autonomies dépassant 800 kilomètres à des vitesses compatibles avec les besoins opérationnels du véhicule.
L’adoption d’une propulsion électrique complémentaire permettrait ainsi de répondre simultanément aux exigences de discrétion acoustique, de maîtrise thermique et d’absence d’émissions de dioxyde de carbone, essentielles à la préservation de l’écosystème cavernicole et à la sécurité des occupants de la Batcave. Une telle configuration hybride, combinant propulsion électrique pour les environnements confinés et réacteur pour les phases de projection rapide et de poursuite à haute intensité, renforcerait la cohérence technique et environnementale de la Batmobile, tout en maintenant l’intégralité de ses capacités opérationnelles.
Motorisation électrique de la Batmobile : Conséquences pour la conception de l’atelier de la Batcave
En conclusion, l’intégration d’une motorisation électrique au sein de la Batmobile implique une adaptation fonctionnelle de l’atelier automatisé de la Batcave. Celui-ci doit être en mesure de prendre en charge l’ensemble des opérations spécifiques associées à ce type de propulsion, notamment le remplacement rapide des batteries afin d’éviter les contraintes liées aux temps de recharge, ainsi que la recharge et la gestion de batteries de substitution. Ces exigences soulignent que l’évolution du système de propulsion de la Batmobile ne peut être envisagée indépendamment de l’infrastructure technique de la Batcave, laquelle doit être pensée comme un environnement pleinement compatible avec les technologies électriques avancées.
La suite des articles sur la définition des besoins du projet BATLab112
La prise en compte d’un environnement iconique : Préserver les chauves‑souris dans la Batcave
Dans la gestion de projets technologiques, la définition des besoins constitue une étape fondamentale. Elle requiert une analyse approfondie de…
Lire la suite …
Une partie prenante incontournable : Alfred Pennyworth au cœur du projet BATLab112
Lors de la phase de définition des besoins, l’identification et la prise en compte des parties prenantes autres que le…
Lire la suite …
La prise en compte de l’existant : le cas mythique de la Batmobile
Dans la première étape de gestion d’un projet technologique, la collecte des besoins du client passe par la prise en…
Lire la suite …Les articles de l’étape de gestion de projet suivante : Le cahier des charges

Atelier de la Batcave – Cahier des charges – Ep2
Cette animation apporte des précisions sur des éléments contenus dans le diorama pédagogique
Lire la suite …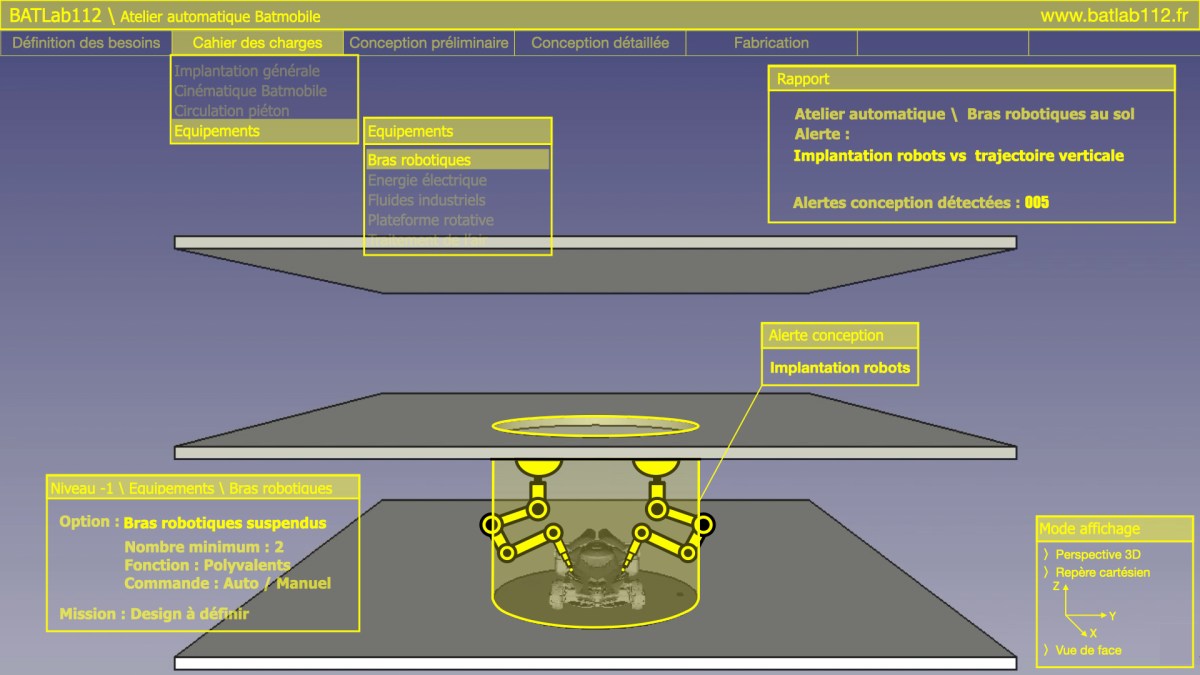
Atelier de la Batcave – Cahier des charges – Ep1
La phase d’élaboration du cahier des charges constitue une étape structurante dans tout projet d’ingénierie, en ce qu’elle formalise, de manière rigoureuse et explicite, l’ensemble…
Lire la suite …