Introduction
Ce premier modèle opérationnel de la console de commande permettant de piloter les équipements industriels de la Batcave ; plateforme rotative, pont élévateur, pont roulant et bras robotiques, apporte des évolutions nécessaires suite à la réalisation du prototype. Ces améliorations portent essentiellement sur le design mécanique, l’esthétique et l’électronique.
Évolutions du design mécanique
Profondeur du pupitre

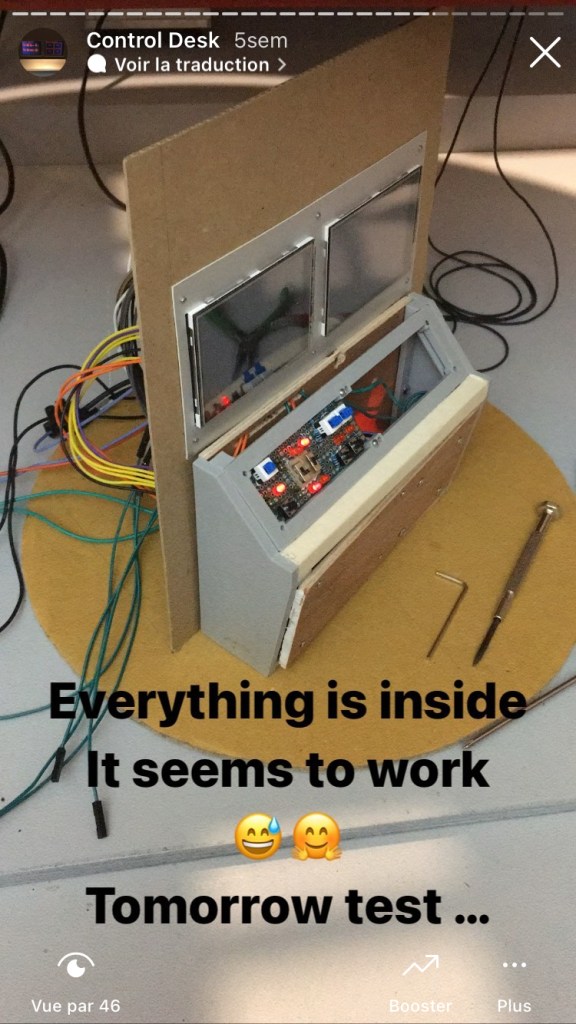

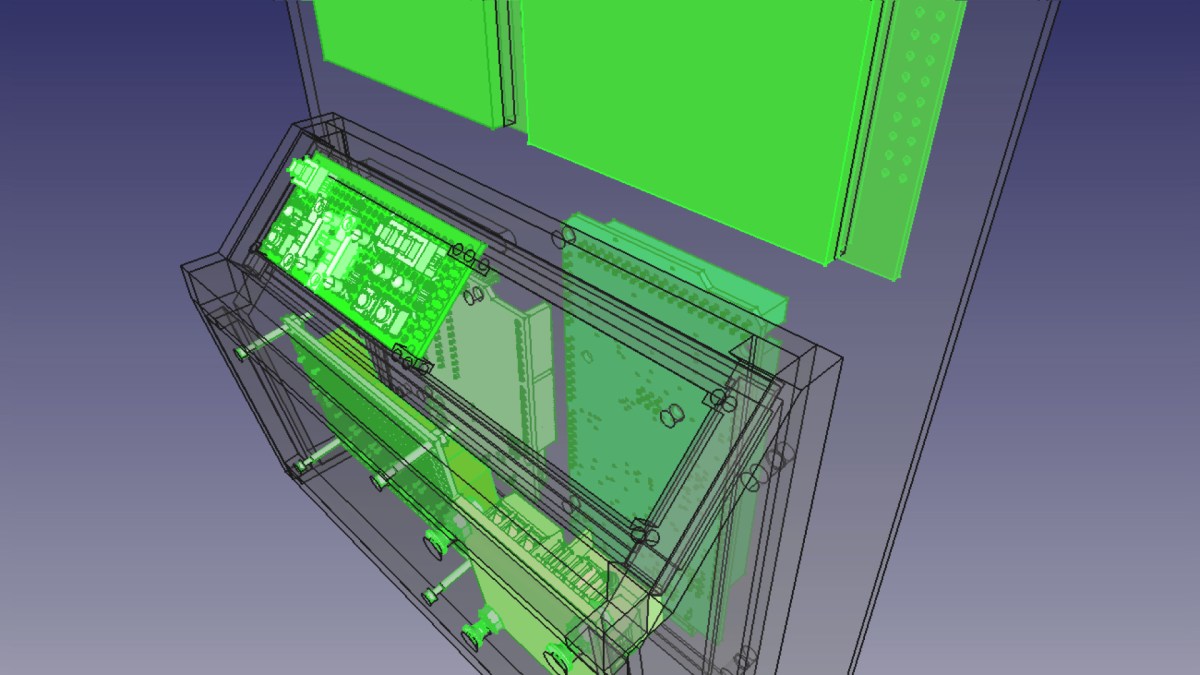
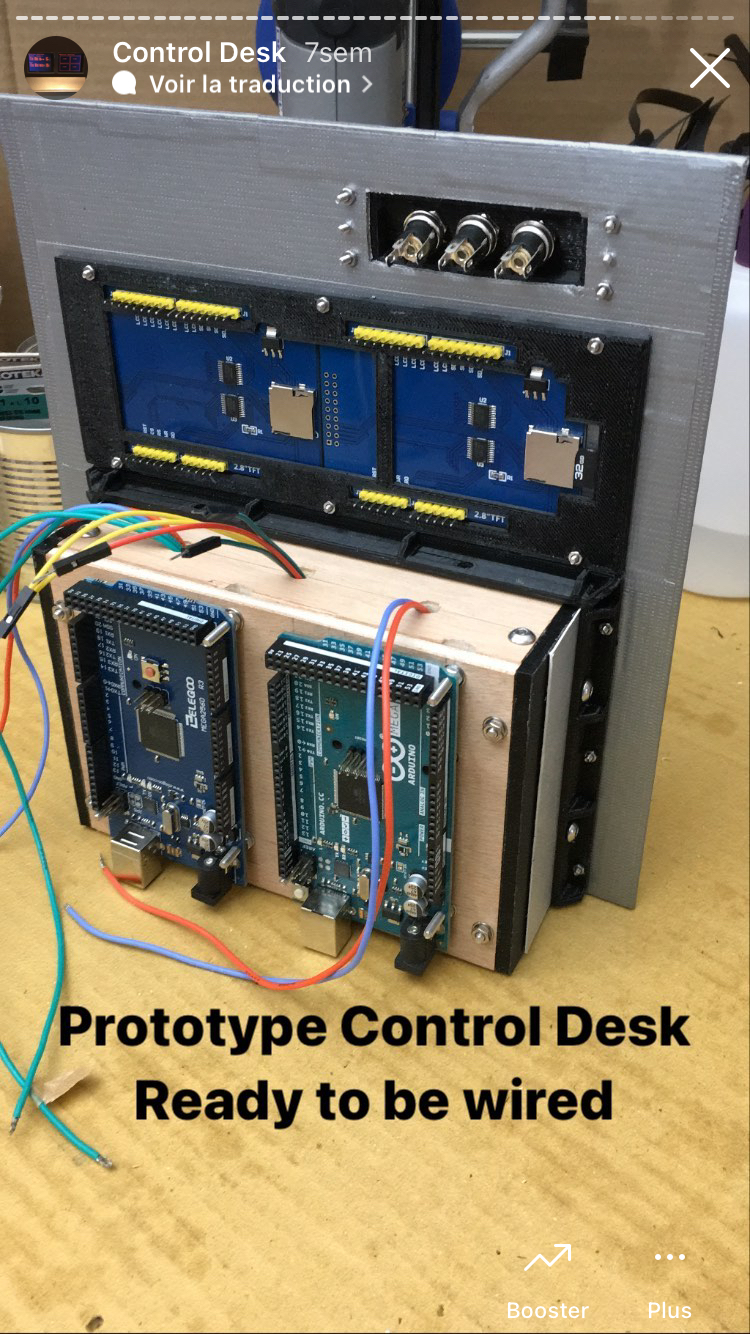
Le design du prototype de la console de commande ne permettait pas de contenir aisément tout le câblage interne nécessaire et encore moins d’en autoriser une modification (Photos N°1 & 2). Le design de ce premier modèle opérationnel présente des dimensions plus grandes des panneaux latéraux offrant une plus grande profondeur et facilitant ainsi l’intégration et la modification du câblage (Photos 3 & 4).
Dimensions du panneau vertical
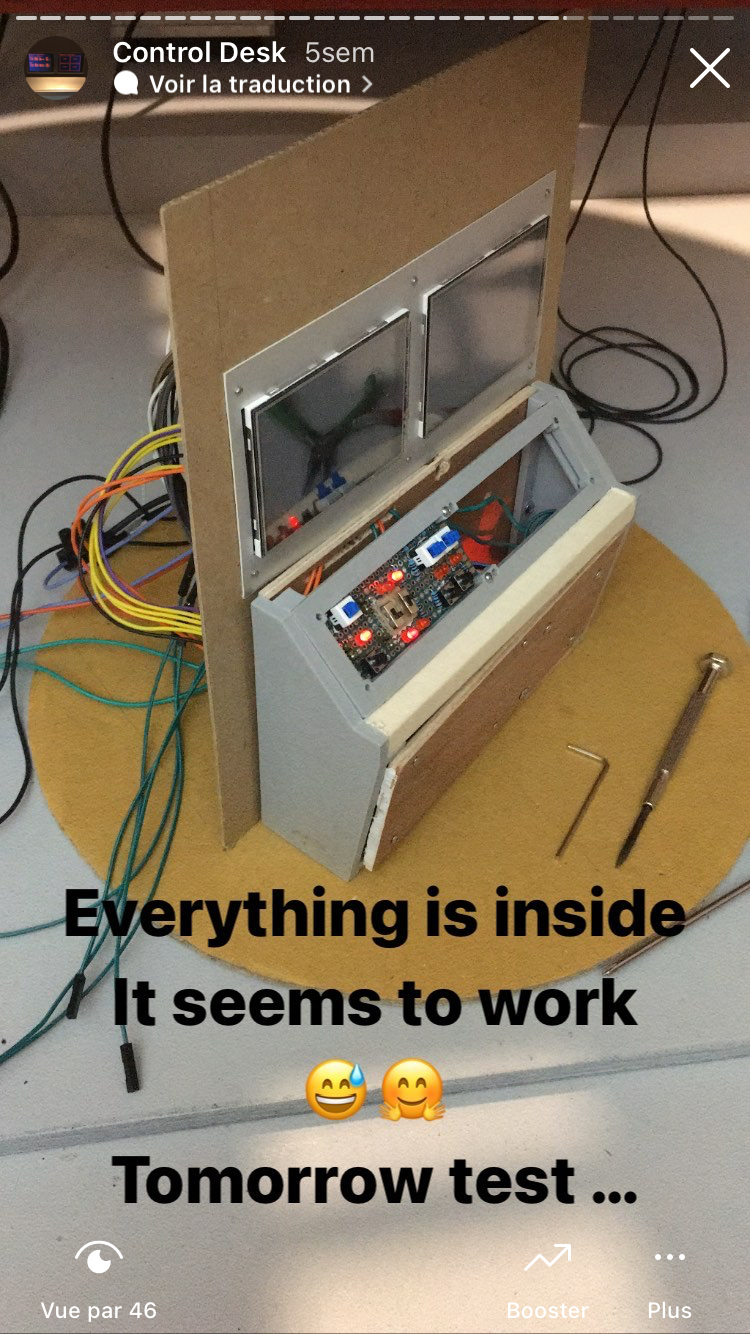

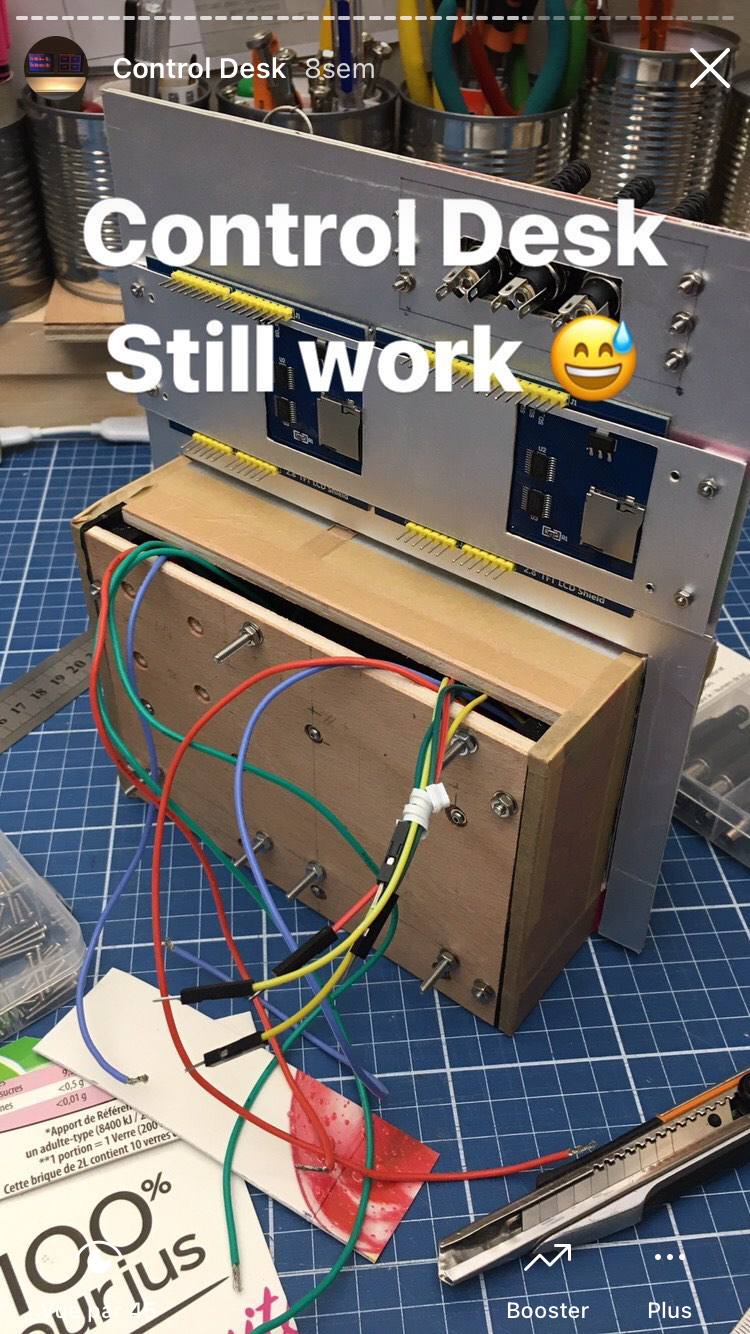

La hauteur du panneau vertical du prototype s’est avérée insuffisante pour intégrer les borniers de connexion en prises type jack (Photos n°1 & 2). Les dimensions de ce panneau ont été modifiées pour faciliter l’intégration de ces borniers (Photos n°3 & 4). L’ajout de borniers supplémentaires permet aussi de prendre en compte une erreur de conception du prototype concernant l’alimentation des cartes Arduino par des tensions supérieures à 5VDC.
Assemblage des sous-ensembles




Le design du panneau vertical du prototype était assemblé directement sur le panneau arrière du pupitre (Photo n°1). Le design du panneau de ce modèle opérationnel est beaucoup plus découpé pour prendre en compte la profondeur supplémentaire de la console. Cette nouvelle contrainte rend son assemblage sur le pupitre plus complexe. Deux pièces d’assemblage ont donc été conçues (Photo n°2). Ces pièces facilite le montage et le démontage (Photos n°3 & 4).
Rendu esthétique général



Le nouveau design du panneau verticale de ce modèle a induit un changement de matériau de fabrication. La couleur naturelle du carton utilisé pour la première version pouvait être satisfaisante en terme de rendu esthétique réaliste. La couleur blanc satiné du panneau de cette nouvelle version n’est pas très satisfaisante (Photo n°1). Le test d’habillage de ce panneau avec la même matière que la console, ainsi qu’un test avec du ruban adhésif de couleur gris métallisé, n’ont pas donné de résultat satisfaisant (Photo n°2 & 3). La solution retenue est un habillage réalisé avec du vinyle adhésif gris anthracite.
Évolutions électroniques
Réalisation des cartes électroniques
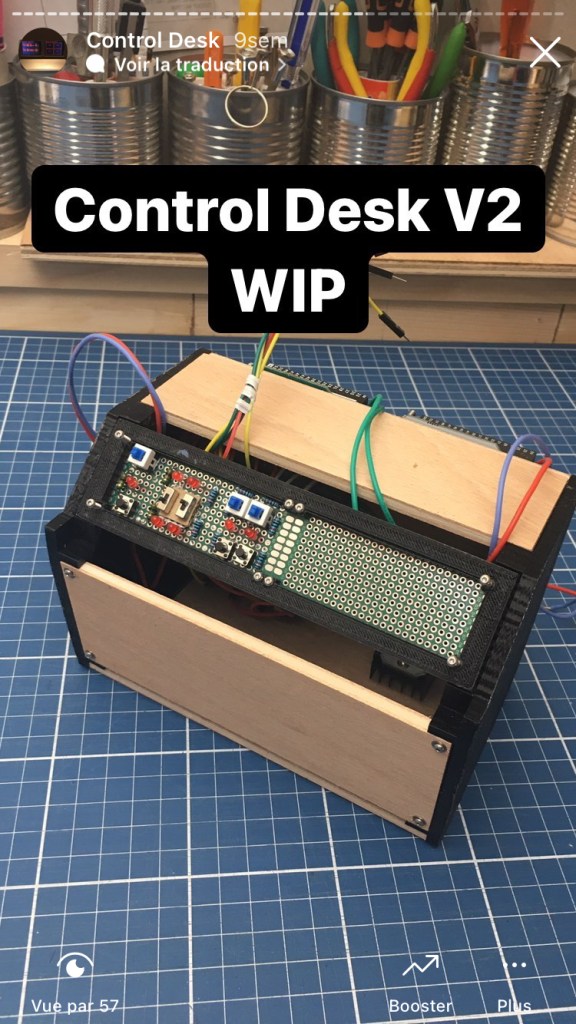
La méthode de réalisation des cartes électroniques a été revue, notamment pour celle du panneau de commande. Le routage manuel a été simplifié rendant plus aisée la soudure manuelle des composants.
Modèles de cartes Arduino
Deux cartes Arduino Mega équipent ce premier modèle de la console de commande. Ces cartes permettent de piloter l’affichage des écrans tout en conservant des broches d’entrées/sorties libres pour assurer d’autres fonctions comme par exemple la synchronisation entre les deux cartes.
Test de validation fonctionnelle
Les deux vidéos suivantes montrent le bon fonctionnement de la console de commande. La première vidéo focalise plus particulièrement sur le fonctionnement des commandes manuelles du panneau de contrôle ainsi que l’affichage horodaté de ces commandes sur l’écran de droite. La deuxième vidéo montre la liaison entre les commandes manuelles et le pilotage de la plateforme rotative. L’affichage de l’écran débauche n’est pas encore réellement opérationnel.
Conclusion
Le design de ce premier modèle de la console de commande est satisfaisante. Les principes d’assemblages des différents sous-ensembles sont fonctionnels. L’électronique de commande ainsi que la gestion de l’affichage des commandes et leur l’horodatage par les carte Arduino est en cours de codage. L’esthétique générale de cette version est plutôt satisfaisante même si certains détails sont à améliorer. Il reste encore à finaliser et valider la programmation.