Le film Justice League diffusé en 2021 est la version director’s cut du film Justice League, sorti en 2017. Réalisé par Zack Snyder et diffusé en 2021, ce long-métrage propose un récit étendu et remanié, plus fidèle à la vision originelle du cinéaste.
Synopsis
Synopsis (VO)
In Zack Snyder’s Justice League, determined to ensure Superman’s ultimate sacrifice was not in vain, Bruce Wayne aligns forces with Diana Prince with plans to recruit a team of metahumans to protect the world from an approaching threat of catastrophic proportions. The task proves more difficult than Bruce imagined, as each of the recruits must face the demons of their own pasts to transcend that which has held them back, allowing them to come together, finally forming an unprecedented league of heroes. Now united; Batman, Wonder Woman, Aquaman, Cyborg and the Flash must save the planet from Steppenwolf, DeSaad and Darkseid and their dreadful intentions.
Source : https://dcextendeduniverse.fandom.com/wiki/Zack_Snyder%27s_Justice_League
Synopsis (VF)
Dans Zack Snyder’s Justice League, Bruce Wayne (Ben Affleck), bien décidé à ce que le sacrifice ultime de Superman (Henry Cavill) ne soit pas vain, s’associe à Diana Prince (Gal Gadot) dans le but de recruter une équipe de métahumains et protéger le monde.
Source : https://fr.wikipedia.org/wiki/Zack_Snyder%27s_Justice_League
Résumé détaillé de la scène
Dans la séquence de la bataille finale, Batman décide de se placer en première ligne, tout d’abord seul aux commandes du Flying Fox pour percer le dôme de défense érigé par Steppenwolf, puis à bord de la Batmobile équipée d’un puissant arsenal embarqué. Grâce à un signal audio de fréquences spécifiques, émis depuis la Batmobile, Batman détourne l’attention des Paradémons sur lui. Ce procédé confère au véhicule le statut d’appât tactique, absorbant la majeure partie de l’assaut ennemi et permettant ainsi aux autres membres de la Justice League de poursuivre leur mission sans être entravés par la masse des créatures.
Dans sa course en direction du pilier centrale des lignes de défense de Steppenwolf, attaquée de toute part par un véritable essaim de Paradémons, la Batmobile abat un grand nombre de ces créatures mais subit des dommages par les quelques assaillants qui parviennent à s’agripper à la structure de la Batmobile pour essayer de lui arracher ses canons. Lorsque la Batmobile arrive au pied du pilier central, elle se trouve sous les feux croisés de puissants canons énergétiques. Un impact direct projette le véhicule en l’air avant de provoquer son explosion. Batman s’éjecte à temps et poursuit le combat au corps à corps.
Analyse et portée symbolique
Cette séquence met en lumière la contribution spécifique de Batman à la dynamique collective. Son absence de pouvoirs surhumains est compensée par une compréhension fine de la guerre asymétrique, sa capacité à exploiter la technologie comme multiplicateur de force et accepter le risque individuel pour garantir l’efficacité du groupe. En ce sens, la Batmobile dans Justice League ne doit pas être interprétée uniquement comme un symbole iconique de la mythologie de Batman, mais comme un outil narratif destiné à traduire en termes visuels la dimension militaire et sacrificielle de son rôle.
La destruction de la Batmobile dans Zack Snyder’s Justice League ne résulte pas d’un affrontement technologique, mais de la confrontation avec une force quasi illimitée en nombre. Le véhicule, symbole de l’ingéniosité et de la puissance technologique de Batman, se trouve ici dépassé non pas par une invention plus avancée, mais par l’accumulation incessante de créatures attirées par sa présence.
La séquence souligne la dimension sacrificielle de l’acte de Batman. En dirigeant la Batmobile au cœur du combat, il accepte de perdre son arme la plus emblématique pour offrir un répit à ses alliés dotés de capacités surnaturelles. Le véhicule cesse alors d’être un simple instrument technologique pour devenir un élément narratif servant à illustrer la détermination du héros à s’exposer lui-même, et à exposer ses ressources, au-delà de toute logique de préservation. Ainsi, la destruction de la Batmobile prend une valeur symbolique double : elle marque à la fois les limites de la technologie humaine face à cette invasion extraterrestre et la transition de Batman d’un rôle d’homme derrière la machine, à celui de stratège et de chef prêt à se sacrifier pour que l’équipe puisse l’emporter.
D’autres articles du blog BATLab112

Justice League 2021 – La destruction de la Batmobile comme symbole sacrificiel
Le film Justice League diffusé en 2021 est la version director’s cut du film Justice League, sorti en 2017. Réalisé par Zack Snyder et diffusé…
Lire la suite …
The Dark Knight 2008 – La destruction de la batmobile comme symbole de mutation
Ce film intitulé The Dark Knight en version originale est le deuxième film de la trilogie réalisée par Christopher Nolan, sorti en 2008.
Lire la suite …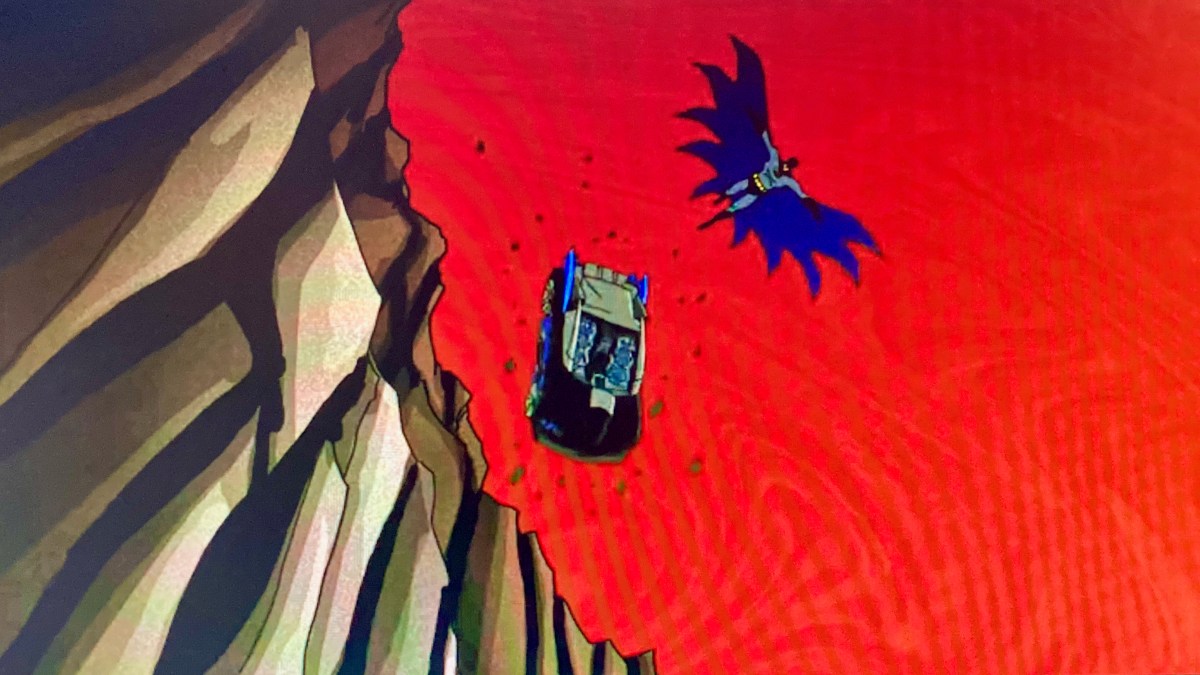
The Batman 2004 – RPM – La destruction de la Batmobile comme symbole de remise en cause
Cet épisode intitulé Nanovirus en version française est le cinquième épisode de la saison 3 de la série animée The Batman, diffusée entre 2004 et…
Lire la suite …Voir tous les articles
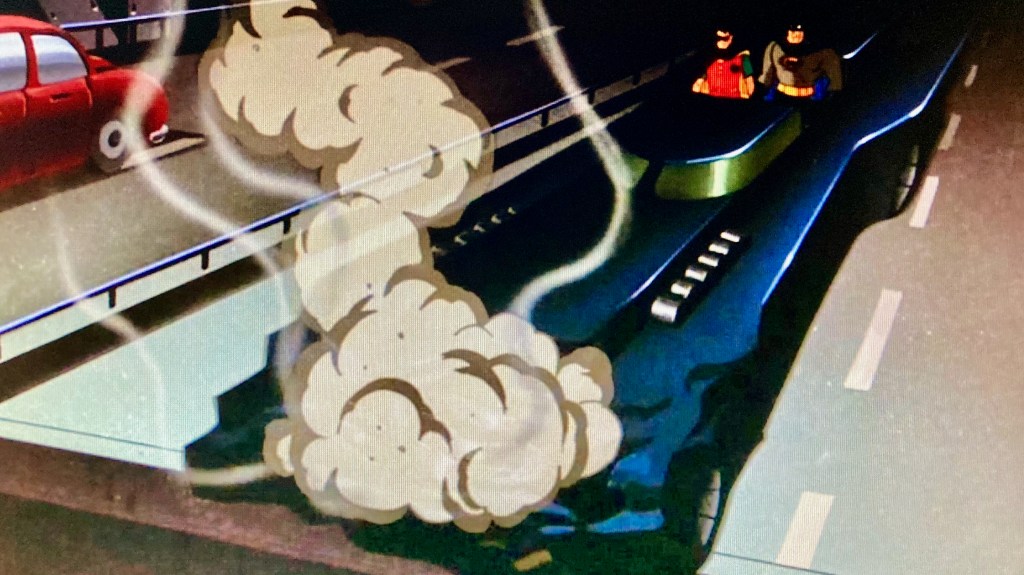
Batman – The Animated Series 1992 – La Batmobile endommagée pour la première fois
Cet épisode intitulé Le super mécanicien en version française (The Mechanic en VO) est le 55eme de la série animée Batman, diffusée à partir 1992.
Lire la suite …
Le mythe de la Batmobile
Objet emblématique en constante mutation, la Batmobile s’impose comme l’un des symboles les plus puissants et les plus signifiants du mythe de Batman. Véhicule, armure…
Lire la suite …
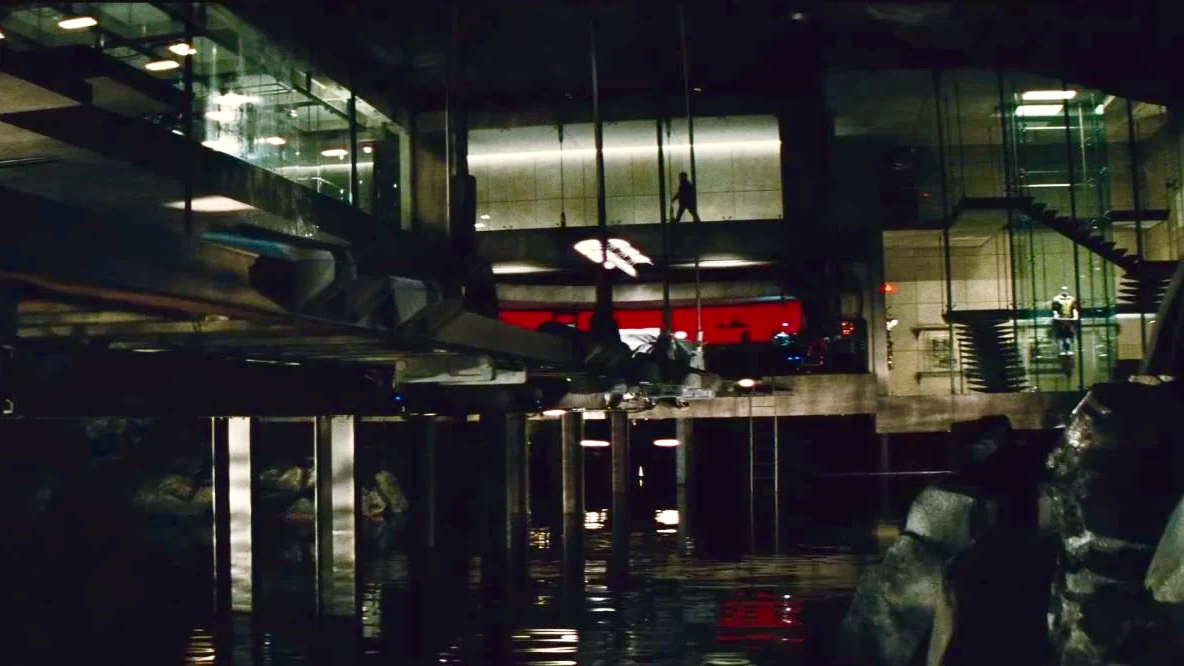
La Batcave du film – The Batman – 2022 … Entre précarité et authenticité
Dans The Batman (2022), le réalisateur Matt Reeves propose une réinterprétation radicale de la Batcave, marquant une rupture nette avec les représentations antérieures du mythe.
Lire la suite …