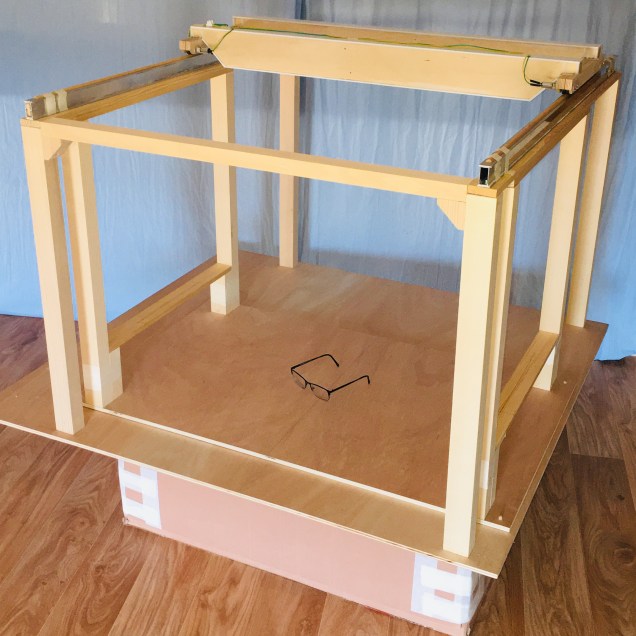
Comme le montre la photo d’en-tête, le prototype de la structure du diorama est réalisée après les prototypes du pont roulant bipoutre et du pont élévateur quatre colonnes. Disposer de ces deux éléments permet de vérifier le bon agencement de la structure tout garantissant leurs intégration. Voir l’article …
Le prototype de la structure est fabriqué entièrement en bois. Les raisons de ce choix sont systématiquement les mêmes pour tout le projet BATLab112. Tout d’abord pour des raisons mécanique. En effet, même si la mousse polyuréthane est souvent utilisée dans la fabrication de diorama, car légère et facile à travailler, le bois assure une meilleure rigidité compte tenu des dimensions et des besoins de précision de fabrication. Ensuite, pour la disponibilité de l’outillage nécessaire. Pour rappel le projet de diorama pédagogique est un projet développé sur fonds propres et donc dans un cadre financier serré. Enfin pour la faciliter d’approvisionnement comparé à des profilés en aluminium par exemple. Pour autant, la qualité des profilés en bois disponibles dans la région de développement du projet BATLab112 n’est pas toujours au rendez-vous, ce qui induit des imprécisions au montage.
Un diorama démontable
Les quatre piliers principaux sont vissés par dessous le plateau pour en garantir le démontage sans compromettre l’esthétique du diorama. Les traverses de renfort, elles aussi réalisée en bois, sont fixées par des tourillons en bois.
La conception préliminaire de la structure du diorama de la Batcave fait suite à la modélisation de l’intégration des systèmes industriels présents dans le diorama. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
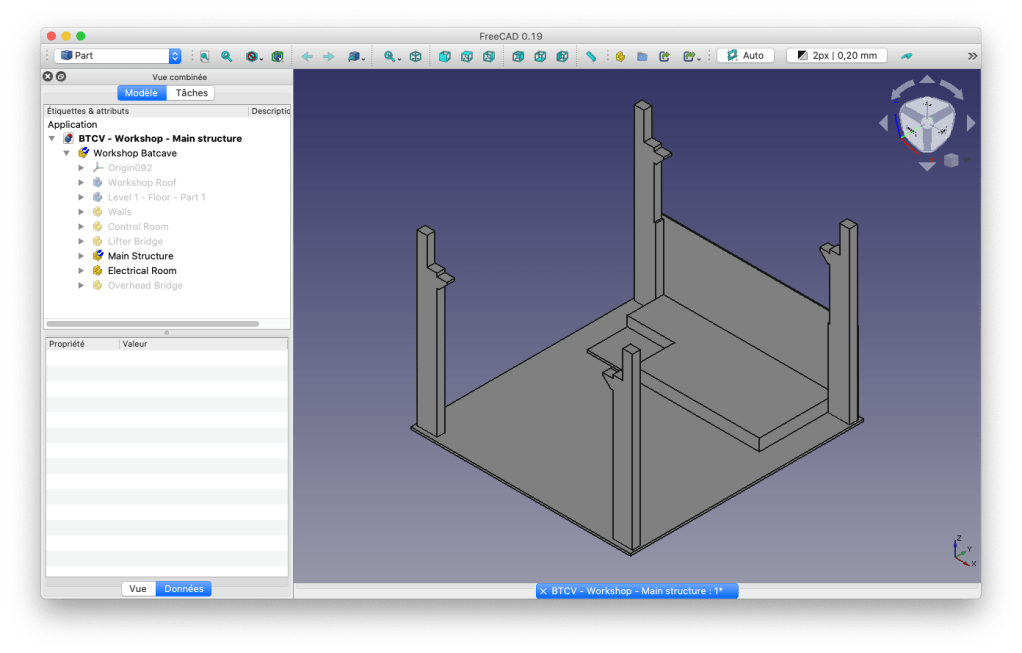
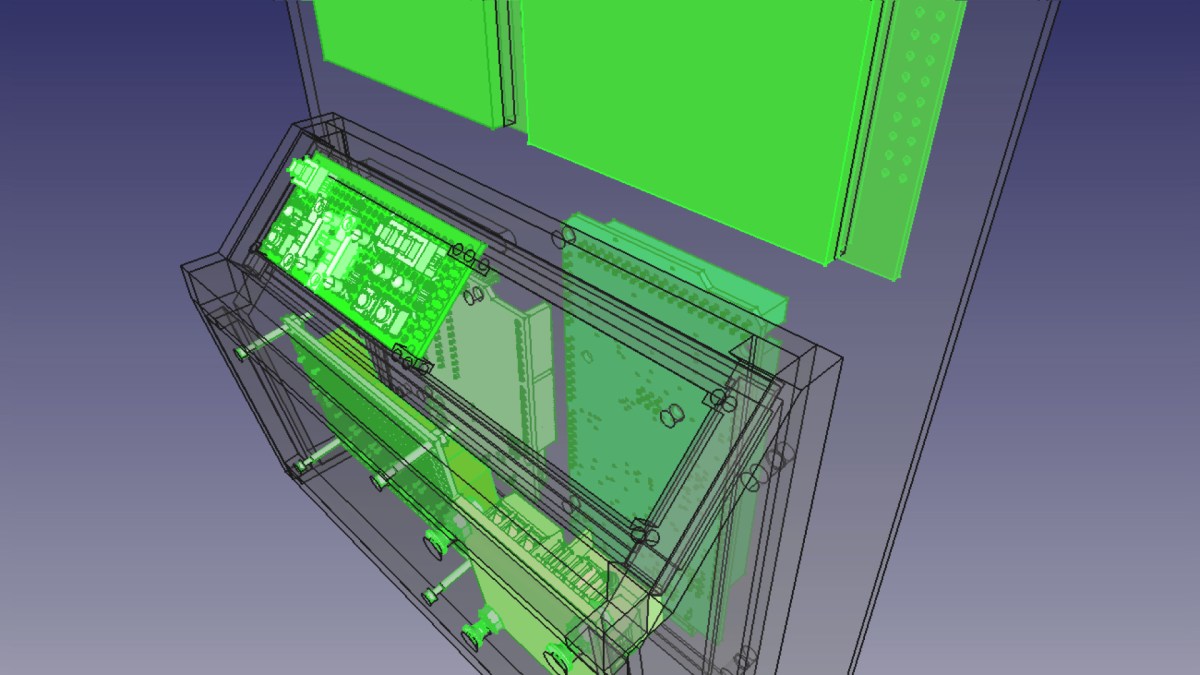
FreeCAD – Batcave Diorama – Main structure – Screenshot 001
FreeCAD – Batcave Diorama – Main structure – Screenshot 002
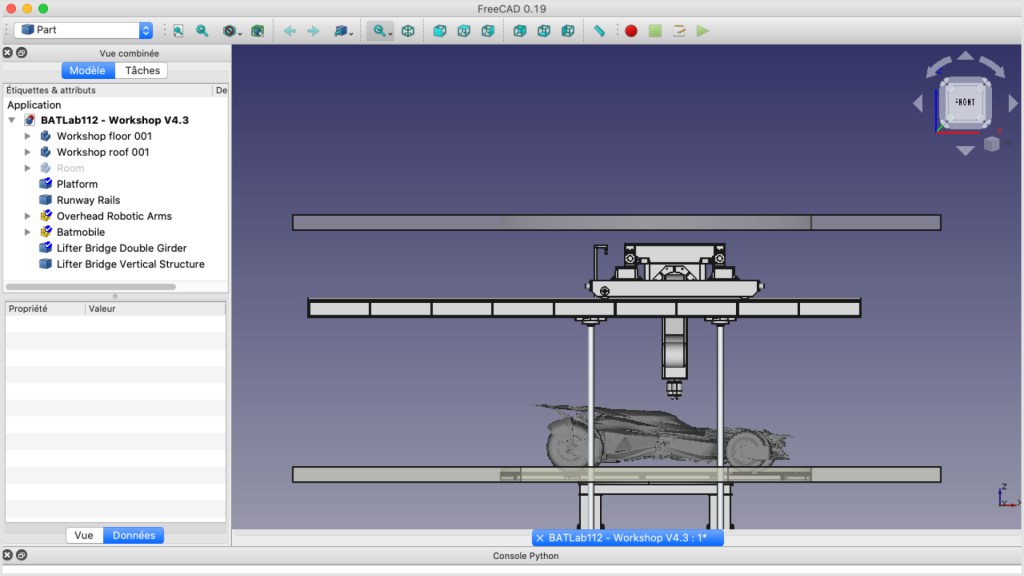
Screenshot 001 – La structure principale est composée d’un plateau sur lequel viennent se fixer les quatre piliers principaux à chaque angle. Ce plateau correspond au niveau 0, celui le plus bas du diorama. Le design des piliers est conçu pour soutenir le plateau du niveau 0, correspondant au niveau d’entrée de la Batmobile dans la Batcave, les chemins de roulements du pont roulant bipoutre, ainsi que le plateau de niveau 0.
Screenshot 002 – Le module du local électrique se glisse entre les piliers du fond du diorama, sur le plateau du niveau 0. Ce module se décompose en deux parties : Une plateforme surélevée et un panneau vertical correspondant au mur de fond.
FreeCAD – Batcave Diorama – Main structure – Screenshot 003
FreeCAD – Batcave Diorama – Main structure – Screenshot 004
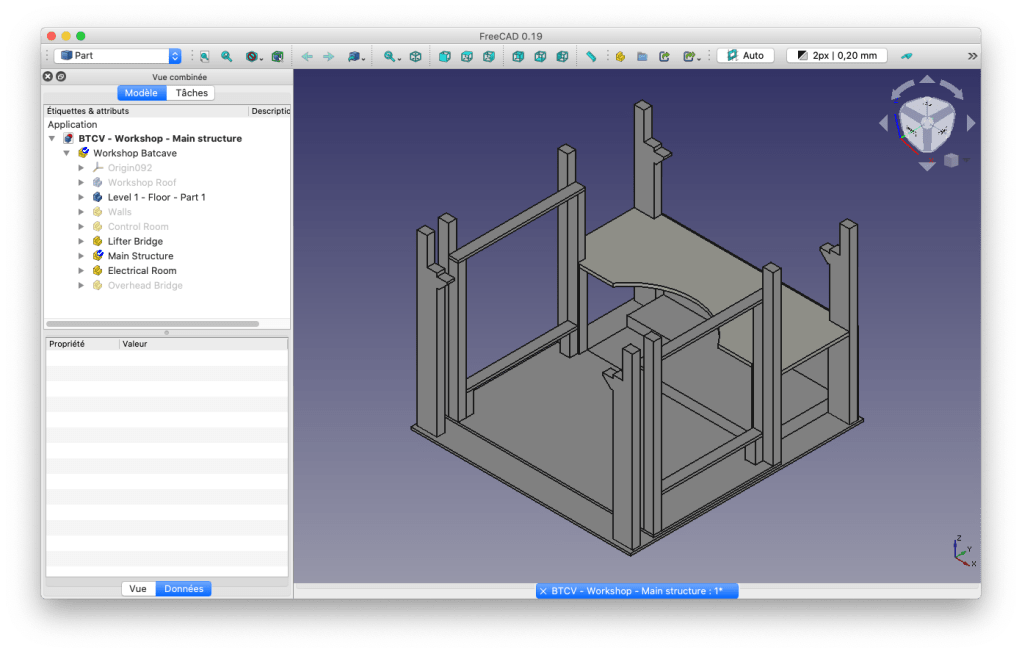
Screenshot 003 – Le module du pont élévateur est posé sur le plateau du niveau 0. Ce module se décompose en un plateau et quatre piliers, ainsi que des renforts pour supporter les quatre axes verticaux du pont élévateur. Ce module est lui aussi conçu pour être démontable, même si sa taille doit permettre de le manipuler d’une seule pièce.
Screenshot 004 – Le demi plateau du niveau 0, correspondant au niveau de l’atelier automatisé de la Batcave, est posé sur la partie basse des deux piliers principaux ainsi que les deux piliers du module du pont élévateur. Le design de ce plateau est conçu pour intégrer l’arrondi de la plateforme rotative au plus prêt, afin de permettre l’accès piéton à la plateforme.
FreeCAD – Batcave Diorama – Main structure – Screenshot 005
FreeCAD – Batcave Diorama – Main structure – Screenshot 006
Screenshot 005 – Le plateau du niveau 0 est posé sur les quatre piliers principaux de la structure.
Screenshot 006 – Le mur du fond est composé des panneaux verticaux du local technique et de la zone de contrôle. Les trois autres murs sont non définis jusque là ; les deux murs latéraux du diorama ainsi que le mur en face avant. Comme ces murs n’ont qu’un rôle esthétique, leurs designs n’est pas étudiés dans cette phase de conception préliminaire dont l’objectif consiste à focaliser sur les aspects fonctionnels du diorama.
Modélisation 3D
FreeCAD
La modélisation de la structure de l’atelier de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
L’animation 3D de présentation de la structure de l’atelier de la Batcave du projet BATLab112 a été réalisé par macros en langage Python sous FreeCad V0.19
Cet article présente la réalisation du prototype de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du prototype de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
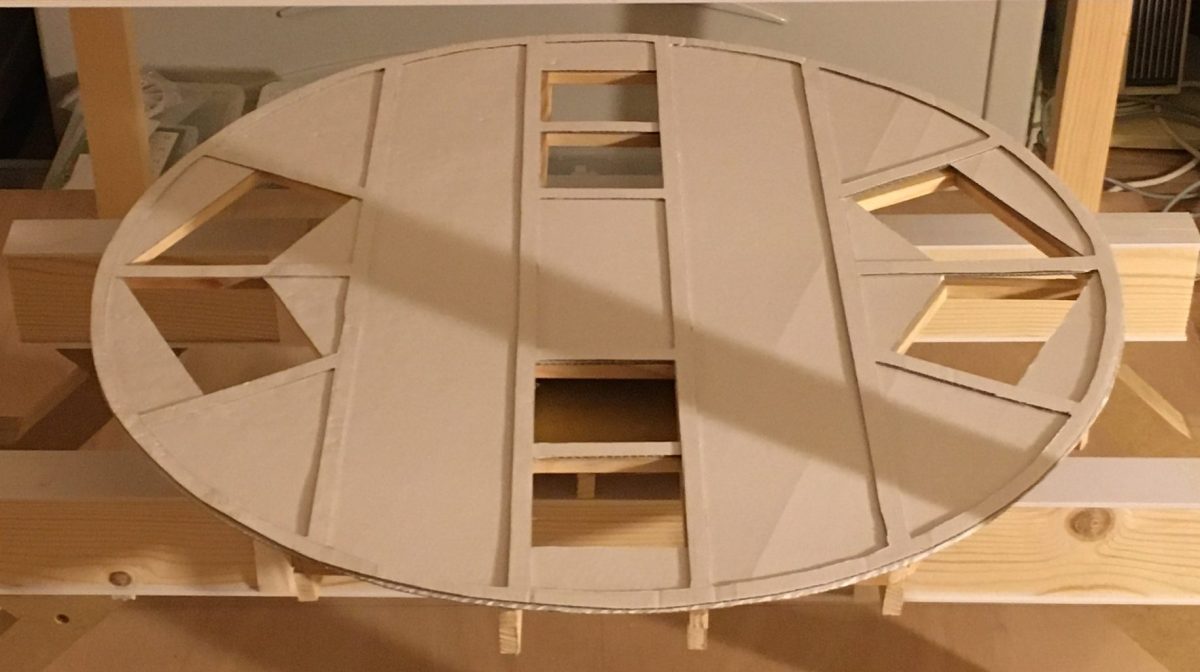
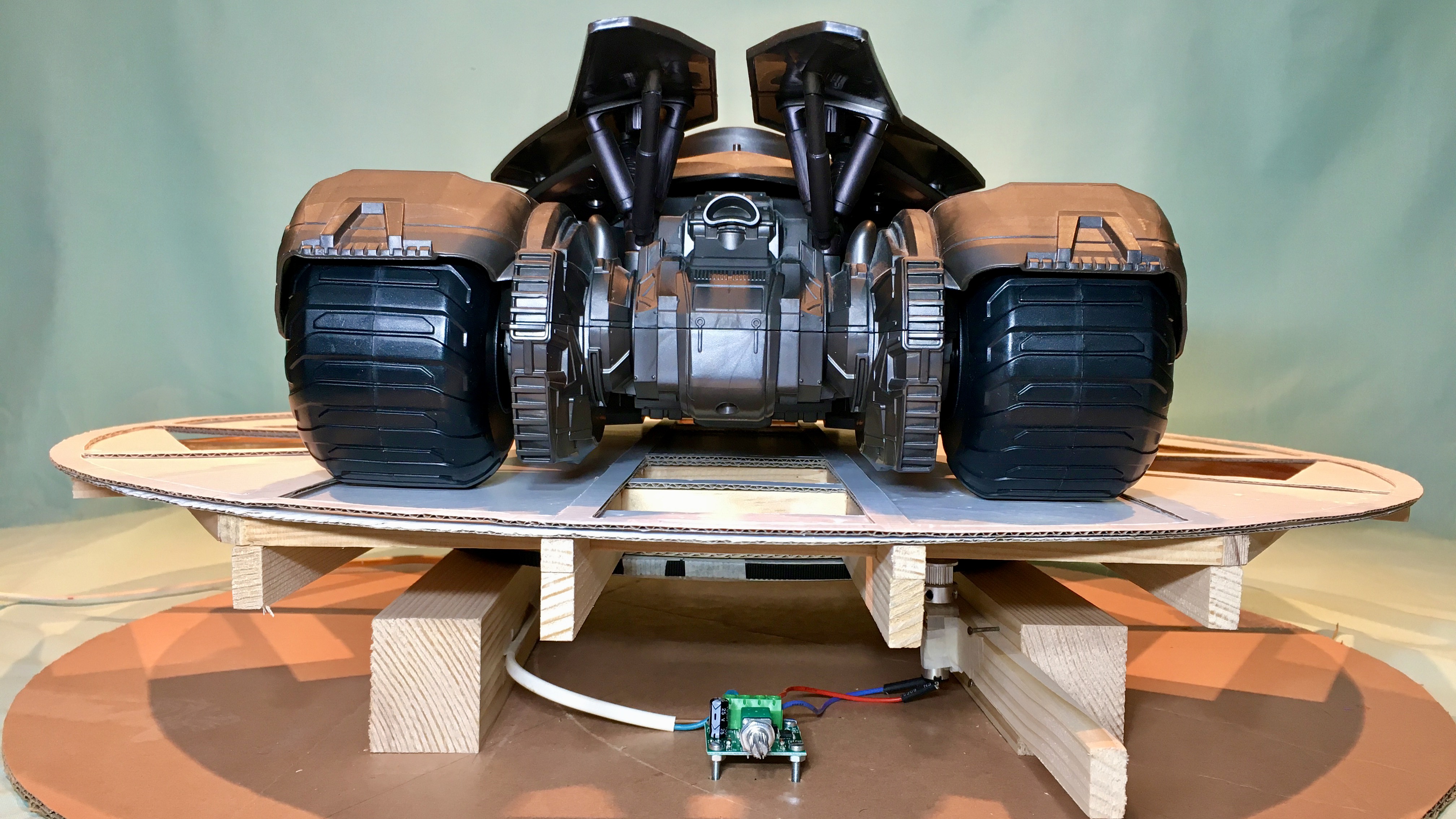
La structure de la plateforme a été fabriquée en bois pour des raisons économiques mais aussi de facilité et rapidité de mise en oeuvre, le montage ayant pu être réalisé par simple collage. La plaque de couverture a été fabriquée en carton. La liaison pivot est assurée par un roulement à bille de type Lazy Susan, généralement utilisé pour des plateaux tournant de table.
La réalisation de ce premier prototype de la plateforme rotative de la Batcave du projet BATLab112 poursuit plusieurs objectifs. Il s’agit dans un premier temps de valider le design issu de la conception préliminaire et dans un deuxième temps de tester la motorisation de ce système.
Valider le design technique
Valider le design fonctionnel
Valider le design mécanique
Tester la motorisation du système
Vues de détails
Design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire
Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite à des différences de côtes rencontrées lors de la réception de pièces manufacturées.
Prototype n°1
Les différents éléments ont été assemblés par collage. La fabrication de la structure en bois est plutôt satisfaisante. Même si les imperfections des pièces de bois utilisées ne permettent pas une précision au millimètre, cette structure présente une surface d’appui pour le plateau suffisamment plane. Elle est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Pour améliorer la précision de fabrication, une solution consisterait à rectifier toutes les pièces de bois avant assemblage ou d’opter pour des profilés aluminium.
Design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le poids total, de la plateforme et du modèle réduit de la Batmobile, doit être le plus faible possible, pour autoriser l’utilisation d’un micro-moteur pour la rotation, afin d’être conforme avec les exigences d’échelle 1/12 du projet. Il s’agit donc ici de contrôler particulièrement si l’utilisation de matériaux légers est compatible avec l’assemblage du roulement à bille plus lourd.
Prototype n°1
L’assemblage de la structure en bois sur le roulement à billes de type Lazy Susan est réalisé grâce à 1 cercle de carton. Ce cercle est collé sur la structure. Les pions (en blancs sur la photo) fixent l’ensemble sur le roulement à billes. Cet assemblage est satisfaisant pour solidariser la structure en bois avec la couronne extérieure du roulement à billes. Il autorise la rotation de l’ensemble par rapport à la couronne intérieure. Le design fonctionnel est donc validé.
Une amélioration consisterait à réaliser le cercle d’assemblage entre la structure en bois et le roulement à billes dans un matériau plus rigide que du simple carton d’emballage ce qui éviterait les éventuelles déformations.
Résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids du modèle réduit de la Batmobile.
Conception préliminaire
Le plateau de la plateforme doit être d’une épaisseur très mince (inférieure à 2mm), pour des raisons de cohérence avec l’échelle 1/12 du projet. Il est nécessaire de s’assurer d’une part que sa réalisation puisse se faire dans un matériau suffisamment léger (ici du carton) pour ne pas rendre l’ensemble trop lourd pour la capacité des moteurs du pont élévateur et de la plateforme. D’autre part, il est aussi nécessaire de s’assurer que ce plateau ne se déforme pas sous le poids du modèle réduit de la Batmobile.
Prototype n°1
Le plateau de la structure est découpé dans une plaque de carton d’emballage d’épaisseur 1mm. Dans un premier temps, ce plateau est simplement posé sur la structure en bois. L’ensemble structure et plateau supporte tout à fait le poids du modèle réduit de la Batmobile. Le plateau ne se déforme pas sous le poids de la Batmobile. L’architecture de la structure de la plateforme associé à un plateau de faible épaisseur est donc validée.
Une amélioration consisterait à réaliser le plateau par découpe laser pour obtenir une découpe plus précise.
Motorisation
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
L’engrenage de transmission est réalisé avec une poulie montée sur l’axe du moteur et une courroie GT2 5mm entourée autour du diamètre extérieur du roulement à billes. La courroie n’a pas été collée mais juste maintenue par du ruban adhésif. Le moteur est lui aussi simplement maintenu par du ruban adhésif contre un des supports provisoires de la plateforme. Le test est concluant malgré un montage sommaire. Cependant, ce montage ne permet pas de réaliser une rotation complète de la plateforme à cause de la présence du ruban adhésif.
La prochaine version de cette transmission devra intégrer le collage définitif de la courroie ainsi qu’une fixation plus appropriée du moteur.
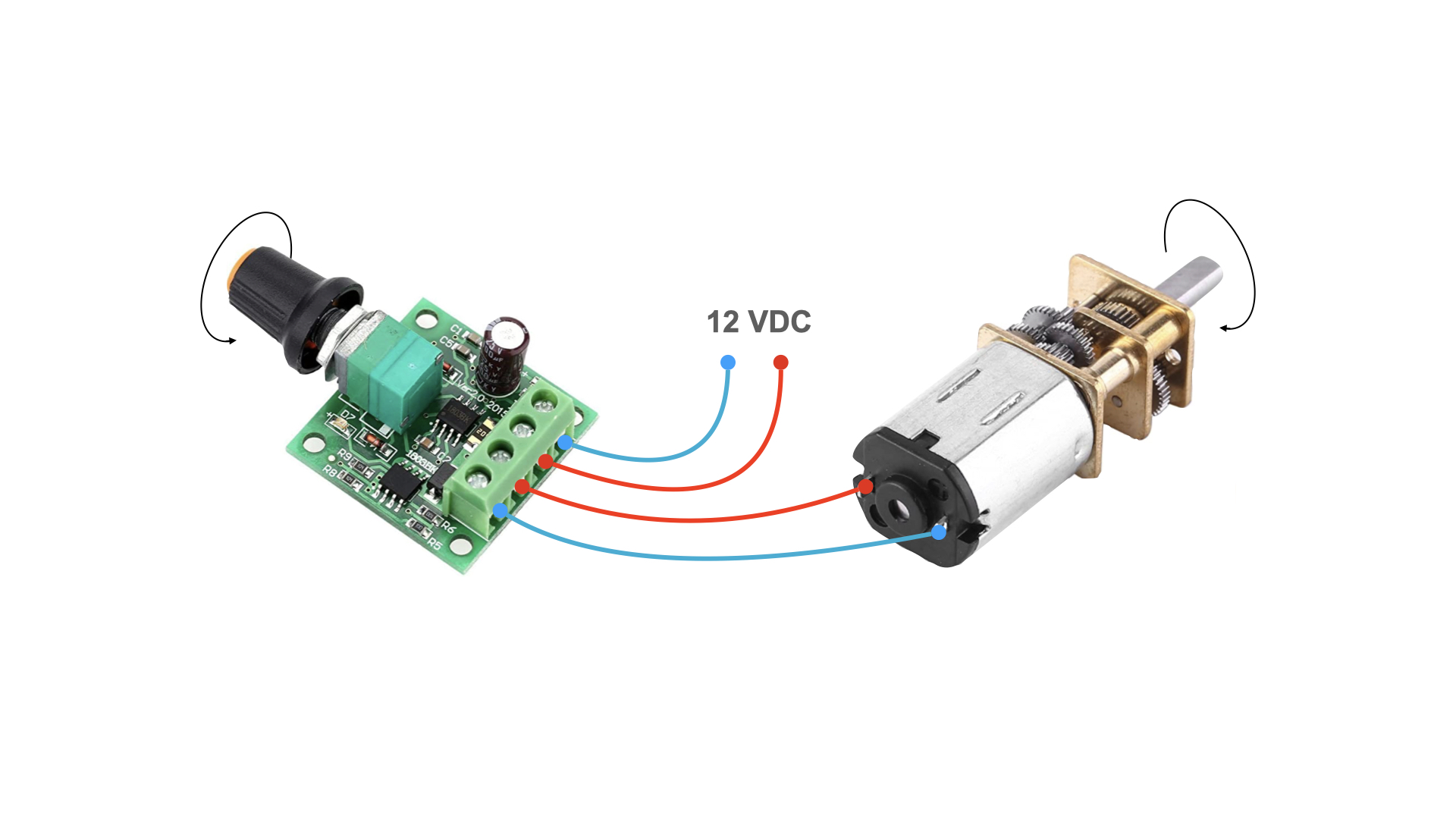
Moteur
Ce test de motorisation a été réalisé avec un micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler la tension d’alimentation du moteur et ainsi ajuster la vitesse de rotation de la plateforme. Le couple du moteur associé au rapport de réduction de l’engrenage suffit pour entrainer l’ensemble ; plateforme et modèle réduit de la Batmobile. Le test de motorisation est donc validé.
Validation fonctionnelle
Conclusion
Ce premier prototype de la plateforme rotative de la Batmobile équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
La Batcave est un espace plutôt restreint qui ne permet pas à la Batmobile de faire un demi tour rapidement. Ce constat est problématique car il implique d’une part des manoeuvres complexes et d’autres part une perte de temps inacceptable compte tenu des possibles enchaînements des mission de Batman. La plateforme rotative de la Batcave du projet BATLab112 est une solution à ce problème. Elle permet à la Batmobile d’être toujours prête pour repartir vers de nouvelles aventures. Le design général de cette plateforme a été définie lors de la phase de conception préliminaire. Ce design, inspiré de systèmes industriels de type Turntable Car, optimise de plus l’espace occupé par cet équipement.
Objectif
L’objectif de cette fiche est de présenter le dimensionnement de l’engrenage de transmission qui assure la rotation de la plateforme ainsi que son rapport de réduction. Les résultats de cette étude serviront ensuite au dimensionnement du moteur d’entrainement de cette rotation.
Rappels théoriques
Définitions
Voici tout d’abord trois définitions issues de la théorie des engrenages. Ces définitions sont directement associées à des éléments de la solution mise en oeuvre dans la rotation de la plateforme de la Batmobile du projet BATLab112.
Engrenage
Un engrenage est un mécanisme élémentaire composé de deux roues dentées mobiles autour d’axes de position relative invariable. L’une des roues entraine l’autre par l’action des dents successivement en contact. La roue qui a le plus petit nombre de dents est appelée pignon.
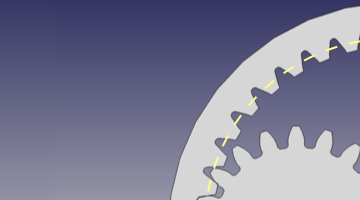
Couronne
Une couronne (ou couronne de train planétaire) est une roue extérieure à denture intérieure.
Engrenage intérieur
Un engrenage intérieur est un engrenage dont l’une des roues est une roue à denture intérieure.
Principes théoriques
Voici quatre principes de la théorie des engrenages. Ces principes sont nécessaires pour le calcul du nombre de dents présents sur la couronne. Ce résultat nous permet ensuite de calculer le ratio entre la vitesse du pignon et celle de la couronne.
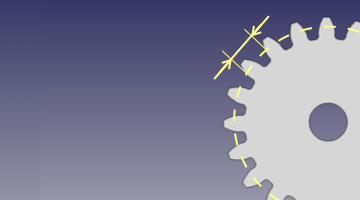
Pas
La distance entre les profils homologues de deux dents consécutives mesurée suivant une procédure définie.
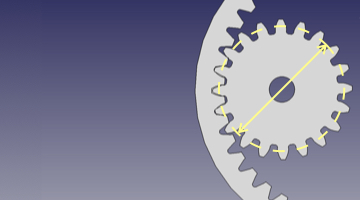
Diamètre primitif
Un diamètre primitif est le diamètre du cercle primitif de fonctionnement
Module
Le module d’une roue, est le quotient du pas exprimé en millimètre par le nombre π M = P / π
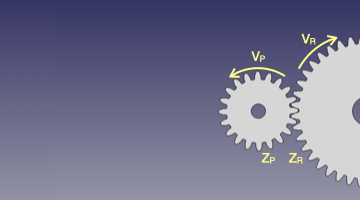
Rapport de réduction
Le rapport des vitesses et égale au rapport inverse des nombres de dents. NP / NR = VR / VP
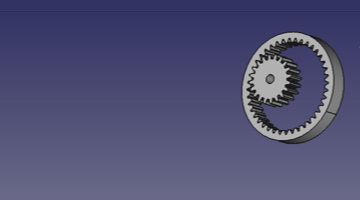
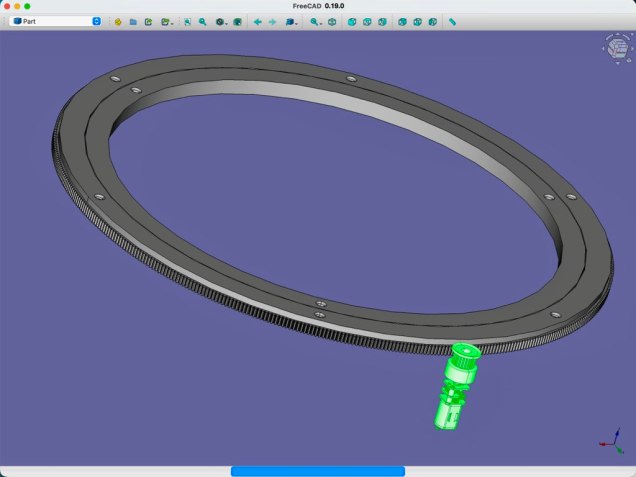
Description de l’engrenage de la plateforme rotative
Les caractéristiques de l’engrenage de transmission de la rotation de la plateforme définis lors de la phase de conception préliminaire sont les suivantes : engrenage à denture droite.
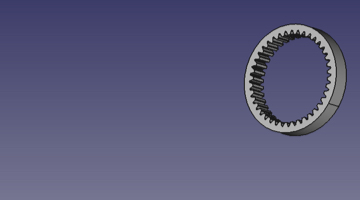
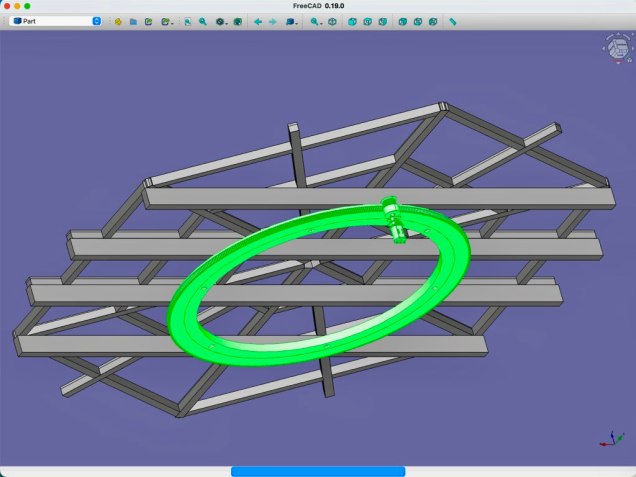
Le mouvement de rotation est assurée par un roulement à bille de type Lazy Susan couramment utilisé pour réalisé des plateaux tournants de table. Le diamètre extérieur de ce roulement est de 300mm. La roue de l’engrenage est réalisée à partir d’une courroie dentée, collée sur la face extérieure du roulement de type Lazy Susan.
Caractéristiques techniques
Ce kit contient : 2 poulies et 1 courroie conçues pour les mécanismes de mouvements linéaires notamment des imprimantes 3D.
Poulies : – Nombre de dents : 20 – Diamètre de l’axe : 5mm – Diamètre total : 15mm – Hauteur totale : 15mm
Courroie : – Longueur : 2000mm – Largeur : 6 mm
Ce roulement à bille de type Lazy Susan est généralement utilisé pour fabriquer des plateaux tournants sur table. Il en existe de différents diamètres.
Lazy Susan : – Diamètre extérieur : 300mm
Calcul du nombre de dents de la couronne
1. Diamètre primitif de la couronne
Dans une première approximation, compte tenu de la faible épaisseur de la courroie, nous allons considérer que le diamètre primitif est identique au diamètre intérieur du roulement Lazy Susan.
Diamètre primitif = 254 mm
2. Calcul du module de la couronne
La couronne utilisée est de type GT2 donc ayant un pas de 2mm. D’après la théorie des engrenages, le module est le résultat du quotient du pas, exprimé en millimètre, par le nombre π.
Module = 2 / π = 0,64
3. Calcul du nombre de dents
D’après la théorie des engrenages, la valeur du diamètre primitif est le résultat de la multiplication du module par le nombre de dents. N : Nombre de dents M : Module D : Diamètre primitif
si D = M * N donc N = D / M
Nombre de dents = 300 / 0,64 = 469 Le nombre de dents sera arrondi à 470
Calcul du rapport de réduction
D’après la théorie des engrenages, le rapport des vitesses et égale au rapport inverse des nombres de dents. R : Rapport de réduction NP : Nombre de dents du pignon (poulie) NR : Nombre de dents de la roue (Couronne) VR : Vitesse de la Roue VP : Vitesse du pignon R = NP / NR = VR / VP. Nous pouvons donc calculer le rapport de réduction de l’engrenage grâce aux nombre de dents de la poulie et de la couronne.
Rapport de réduction = 20 / 470 = 0,042
Conclusion
Avec une poulie de 20 dents et une couronne de 470 dents nous obtenons un rapport de réduction de l’engrenage de 0,042. Cette valeur est inférieure à 1, conformément à la notion de rapport de réduction. En reprenant la formule du rapport de réduction : R = VR / VP , nous pouvons alors écrire que VR = VP * R , autrement dit la vitesse de rotation de la roue est égale à 0,042 fois celle du pignon. En reprenant l’équation dans l’autre sens : R = VR / VP , nous pouvons alors écrire que VP = VR * (1 / R) avec 1 / R = 23,8. Autrement dit, la vitesse de la poulie est environ 24 fois plus rapide que la couronne.
Cet article présente le modèle à l’échelle 1/12 de la Batmobile utilisé comme prototype pour réaliser le diorama pédagogique du projet BATLab112.… Lire la suite →
Cet article contient des références à des marques commerciales. Ceci n’est en aucun cas un placement de produit ou de la publicité. Ces produits sont cités au titre de la référence qu’ils représentent dans la recherche de solutions techniques dans le contexte du projet BATLab112.
Introduction
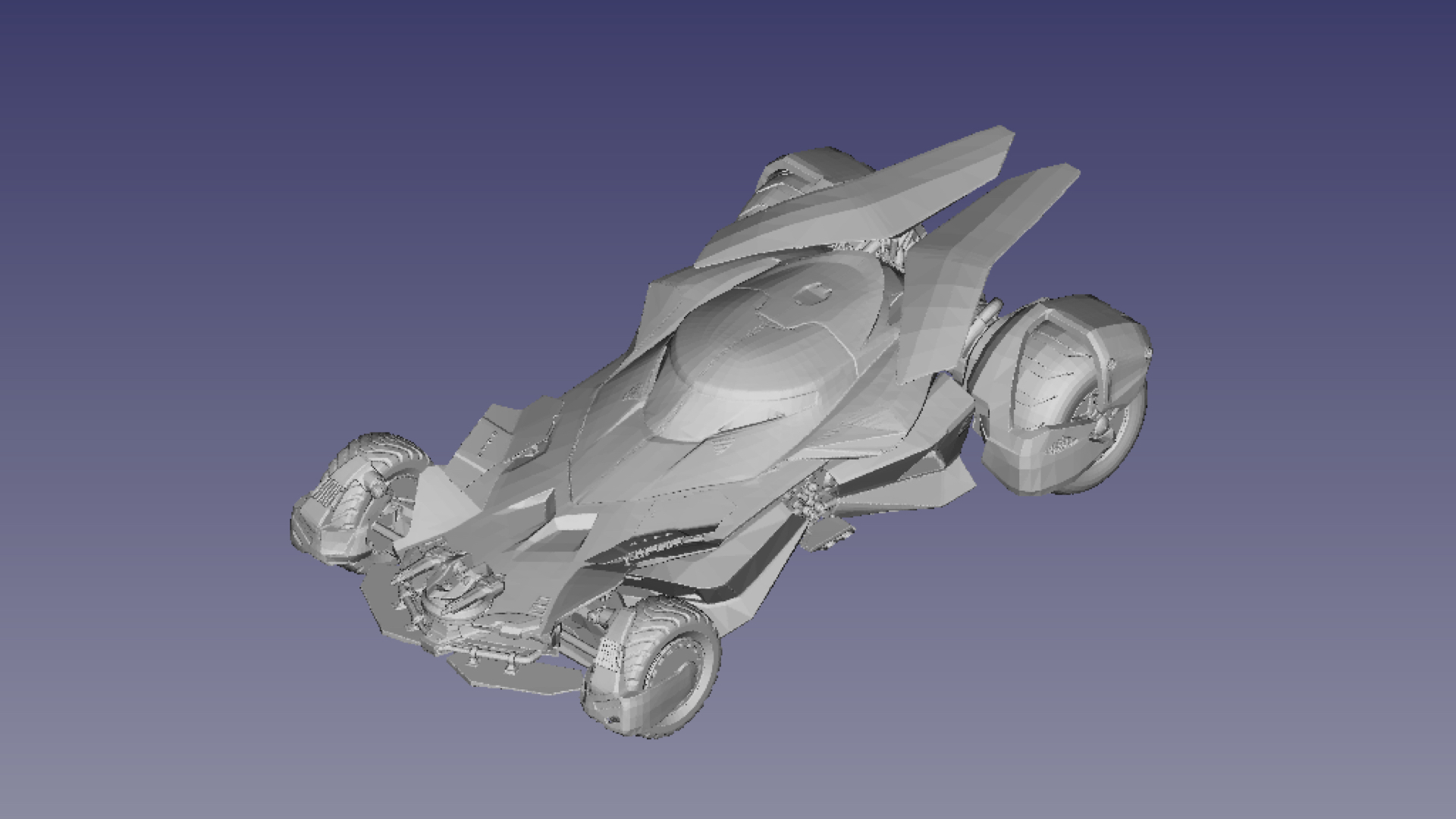
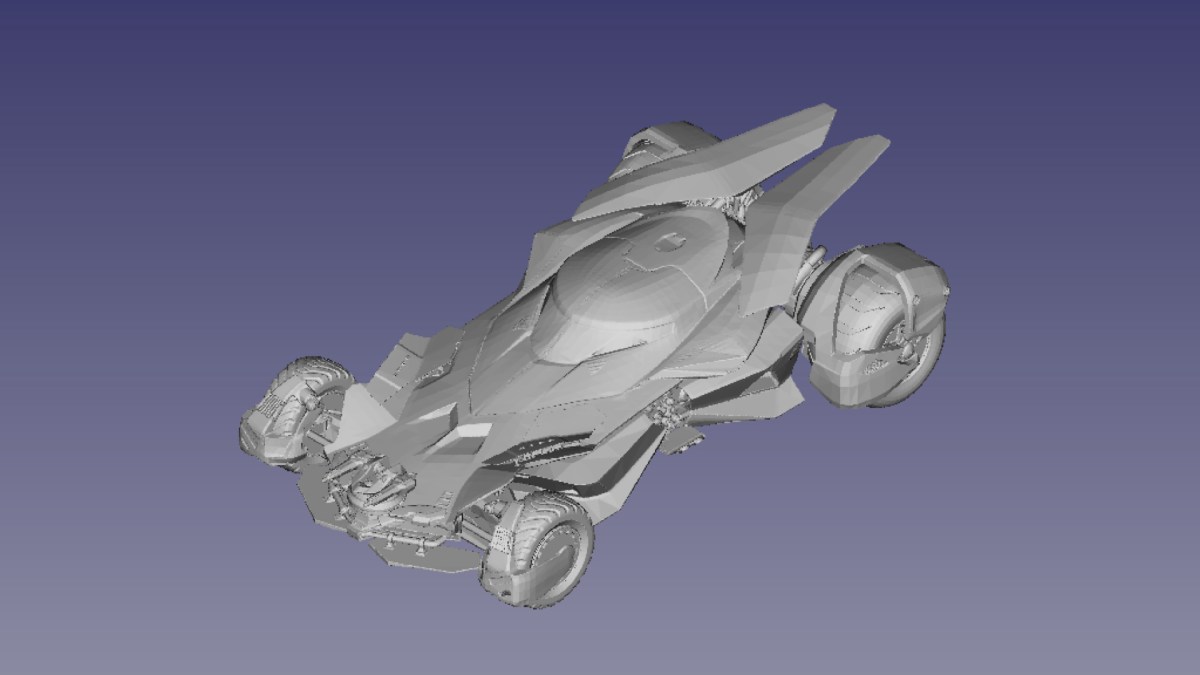
Dans les articles précédents, le type de la Batmobile du projet BATLab112 et le modèle miniature qui sera utilisé dans le diorama de la Batcave ont été définis. Ce choix s’est porté sur la Batmobile des films de Zack Snyder ; Batman V Superman de 2016 et Justice League de 2021. Le modèle miniature à l’échelle 1/12 est produit par Mattel : DC Comics™ Justice League Multiverse Batmobile.
Disposer du modèle numérique de la Batmobile, permet tout d’abord une meilleure visualisation des proportions lors de la phase de conception de l’atelier et des systèmes automatisés. Mais ce modèle permet surtout de garantir une conception du design de chaque équipement, conforme aux dimensions de la Batmobile et ainsi de garantir les libertés de mouvements nécessaires pour ces équipements.
Modèle numérique de la Batmobile
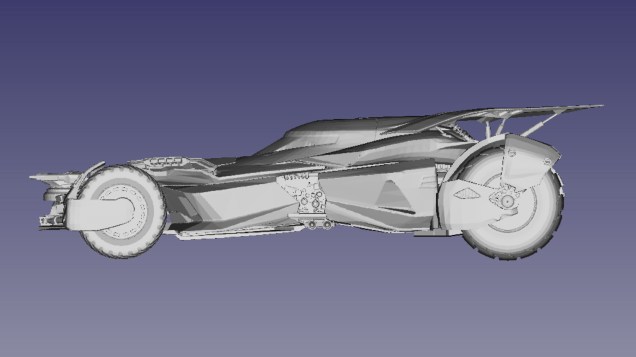
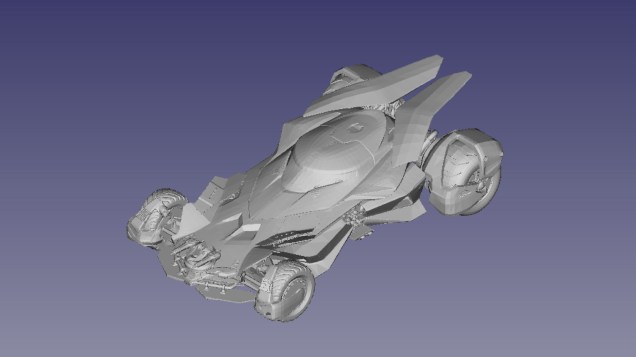
Pour des raisons d’efficacité et de rendu final, le modèle numérique de la Batmobile n’a pas été crée par le projet BATLab112, même si cette opération représentait un exercice intéressant. Obtenir un résultat esthétiquement satisfaisant aurait était très chronophage, préjudiciable à l’avancé du projet. De nombreux modèles de cette Batmobile sont présents sur internet. Cependant, même pour les modèles payants, la très grande majorité d’entre eux présentent plusieurs défauts.
Certains fichiers sont corrompus ou le modèle est inutilisable.
Le rendu esthétique n’est pas très satisfaisant car souvent le modèle est trop peu détaillé.
Les proportions du modèles ne sont pas conformes à une représentation à l’échelle.
Le format des fichiers proposés au téléchargement ne sont pas compatibles avec le format des fichiers du logiciel FreeCAD, utilisé pour concevoir le design du diorama du projet BATLab112.
Le modèle sélectionné pour servir de référence au projet BATLab112 est obtenu à partir de la plateforme de partage collaborative GrabCAD.
Le rendu esthétique est très satisfaisant
Les proportions du modèle sont conformes avec une représentation à l’échelle
Le format du fichier de ce modèle numérique est compatible avec le logiciel FreeCAD, utilisé pour concevoir le design du diorama du projet BATLab112.
La modélisation numérique du diorama pédagogique de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du diorama pédagogique de la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Comme déjà évoqué, la taille de ce modèle réduit de Batmobile est déterminante en terme de dimensionnement générale du projet. Dans la phase de conception préliminaire une modélisation 3D à l’échelle 1/12 de la Batmobile a été utilisée. Dans la phase de conception détaillée et de prototypage, il est nécessaire à présent de valider l’intégration dimensionnelle de ce véhicule.
Plateforme rotative
Le premier système du projet BATLab112, directement impacté par l’intégration du modèle réduit de la Batmobile, est la plateforme rotative. La longueur du modèle réduit de la Batmobile, impose une dimension minimale du diamètre de la plateforme. Par contre, le diamètre de cette plateforme est une contrainte déterminante pour le dimensionnement d’autres systèmes et au final, sur les dimensions hors tout de la maquette. Par conséquent, de la longueur de ce modèle réduit, dépend le respect des objectifs de transportabilité du diorama pédagogique.
Pont élévateur
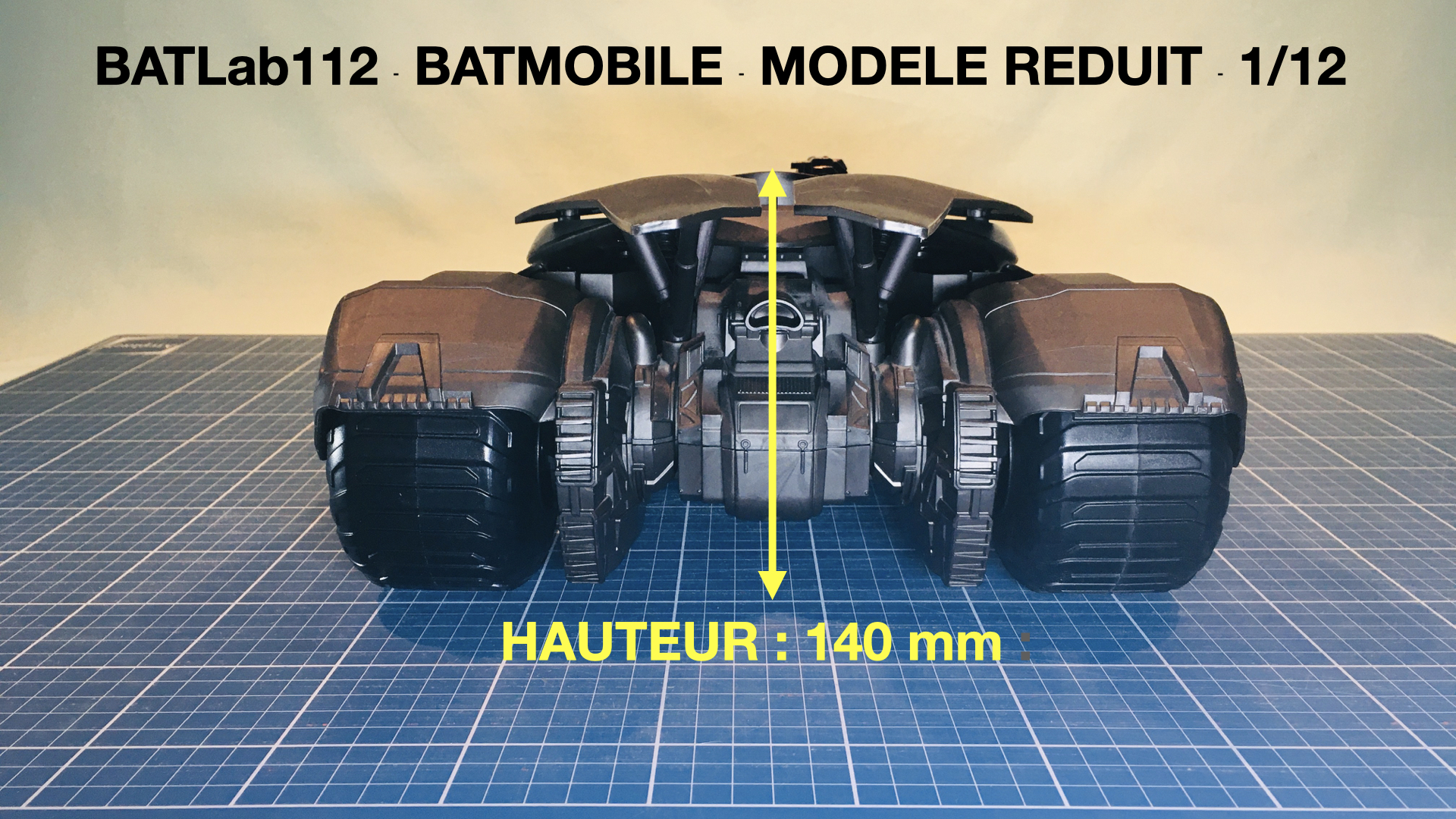
Le deuxième système du projet BATLab112 visé par l’intégration du modèle réduit de la Batmobile est le pont roulant. La hauteur sous poutres de ce pont, destinée à l’espace de manoeuvre des bras robotiques, cumulée à la hauteur des poutres, ainsi que la hauteur de la Batmobile, influe directement sur la hauteur finale de la maquette. Par conséquent, la hauteur du modèle réduit est une contrante déterminante dans le dimensionnement général du diorama de la Batcave.
Cet article présente le modèle à l’échelle 1/12 de la Batmobile utilisé comme prototype pour réaliser le diorama pédagogique du projet BATLab112.… Lire la suite →
Cet article contient des références à des marques commerciales. Ceci n’est en aucun cas un placement de produit ou de la publicité. Ces produits sont cités au titre de la référence qu’ils représentent dans la recherche de solutions techniques dans le contexte du projet BATLab112.
Introduction
Il est important de souligner que si cette article est publié alors que le projet entre dans sa phase de conception détaillée, cette analyse du « prototype » de la Batmobile du projet BATLab112 date des tous premiers instants du projet. En effets, le choix du modèle et de la taille de la Batmobile sont des éléments déterminants nécessitant d’être pris en compte dès le début du projet.
La phase de définition des besoins à souligner l’importance de la Batmobile, une icône indissociable du personnage de Batman et de la Batcave. Le modèle de la Batmobile, pris en référence pour la réalisation du projet BATLab112, a été défini dans un précédent article, pour dimensionner les équipements de la Batcave du projet. Le modèle de la Batmobile du projet Batlab112 est celle des films de Zack Snyder ; Batman vs Superman, Dawn of Justice de 2016, et Justice League de 2017-2021.
Il existe de nombreux modèles réduits de la Batmobile des films de Zack Snyder, mais seulement deux sont présentés comme compatibles à l’échelle 1/12. Ce sont des modèles réduits relativement onéreux à l’achat et plutôt destinés à des collectionneurs.
Ultimate Justice League Batmobile
Présentation générale
Ce modèle réduit est commercialisé par Mattel™. Ce modèle est aujourd’hui officiellement présenté comme un modèle réduit à l’échelle 1/10. Il faut préciser que lors de sa sortie commerciale, il était alors présenté comme un modèle compatible à l’échelle 1/12, comme l’attestait la figurine livrée avec. La taille de cette figurine était similaire à celle de figurines de marques célèbres à l’échelle 1/12.
Avantages de ce modèle
En terme de perspectives d’intégration dans le projet BATLab112, ce modèle réduit de Batmobile est très intéressant. Il dispose d’une qualité de fabrication très soignée, offrant un niveau de réalisme tout à fait satisfaisant avec les ambitions d’un diorama pédagogique. De plus, ce modèle radio-commandé très abouti, permet d’envisager son intégration dans les automatismes du projet BATLab112 de manière relativement directe et rapide.
Inconvénients de ce modèle
Même si à l’heure où cet article est publié, le prix de ce modèle réduit est en général inférieur, il était initialement d’un montant de l’ordre de 400€ pour un modèle neuf et de 200€ pour un modèle d’occasion. Ce montant représentait un inconvénient important pour le projet. En effet, ce modèle réduit devait être intégré très tôt, dès la phase de conception préliminaire, sans certitude sur la faisabilité du projet à cette échelle.
Comme évoqué lors de la présentation générale de ce modèle réduit, son échelle ne respecte pas le ratio 1/12. Sa capacité à être compatible avec des figurines à l’échelle 1/12, n’est pas un critère suffisant pour le projet BATLab112. Ses dimensions plus importantes que l’échelle 1/10 lui confère, est une source de difficultés d’intégration dans le projet.
DC Comics™ Justice League Multiverse Batmobile
Présentation générale
Ce modèle réduit est commercialisé par Mattel™. Ce modèle réduit est présenté comme respectant le ratio 1/12 et compatible avec des figurines à cette échelle. Ce modèle réduit est plutôt rare sur le marché français. Il est très apprécié par les collectionneurs comme modèle d’exposition pour sa conformité avec l’échelle 1/12.
Avantages de ce modèle
Ce modèle réduit dispose d’une qualité de fabrication soignée offrant un niveau de réalisme tout à fait satisfaisant avec les ambitions d’un diorama pédagogique. Le prix de ce modèle réduit est d’environ 80$ pour un modèle neuf et peut s’élever jusqu’à plus de 150$ pour un modèle d’occasion du fait de sa rareté.
Inconvénients de ce modèle
Ce modèle réduit n’est pas radio-commandé et ne dispose d’aucun équipement électrique.
Conclusion
Le choix de l’échelle de réalisation du projet BATLab112 étant fixé pour respecter des contraintes de dimensions finales du diorama, il n’est donc pas envisageable d’opter pour une échelle 1/10. Intégrer un modèle réduit au ratio 1/10 aurait donc soit des conséquences en terme d’esthétique sur le rendu réaliste, soit en terme de contrainte d’intégration pour respecter les objectifs de transportabilité du diorama. Par conséquent, le modèle réduit – Ultimate Justice League Batmobile, n’est pas retenu pour le projet.
Le modèle réduit – Multiverse Justice League Batmobile, est celui retenu pour la réalisation du diorama pédagogique du projet BATLab112. Même si ce dernier est dépourvu de commande électrique, sa conception est compatible avec une intégration à postériori de système de commande à distance, permettant de l’intégrer dans les automatismes du diorama.
Revue de détail
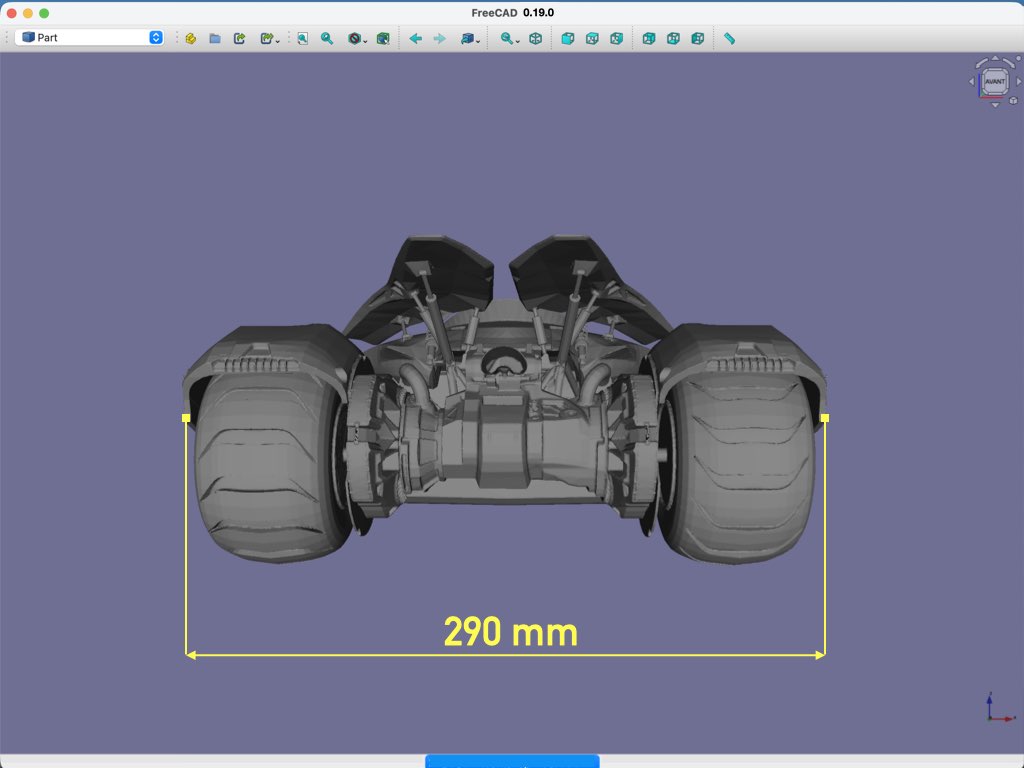
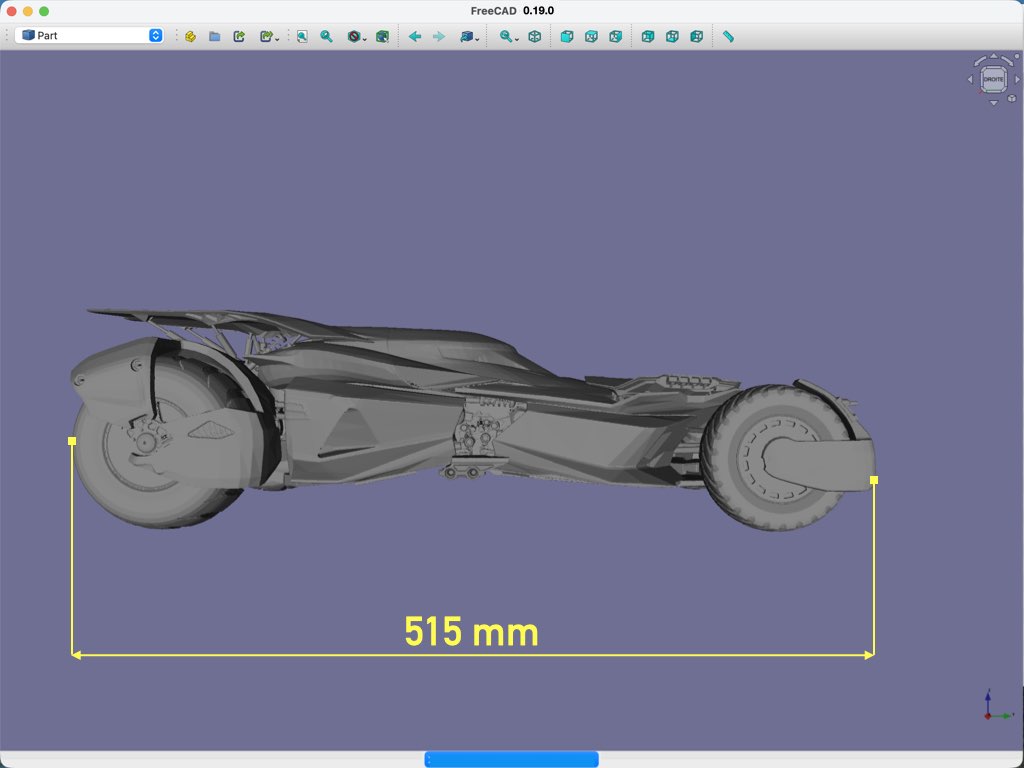
Le tableau suivant, compare les côtes attendues de ce modèle réduit de Batmobile avec celles du véhicule utilisé dans les films de Zack Snyder. Nous pouvons constater que les proportions ont été parfaitement respectées pour la longueur et la largeur. Il semble que la hauteur du modèle réduit soit légèrement plus grande que celle du véhicule réel.
Cet article présente l’intégration, la dernière étape de la conception préliminaire de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La simulation de l’intégration des équipements industriels, consiste à rassembler tous les équipements industriels conçus séparément, dans une modélisation globale de l’atelier de la Batcave du projet BATLab112. Le premier objectif est de contrôler la cohérence du dimensionnement respectif de ces équipements, ainsi que la conformité de leurs interactions fonctionnelles. Le deuxième objectif est de définir la structure de l’architecture générale de l’atelier.
Les quatre équipements industriels sont intégrés ici dans leurs dernières versions issues de la conception préliminaire. La structure générale du diorama supportant ces équipements est symbolisée par les deux plans horizontaux. Cette mise en situation permet de contrôler si les dimensions du diorama prévues dans le cahier des charges sont respectées.
Vues de détails
Situation n°1
Situation n°2
Cette simulation de l’intégration des équipements permet de contrôler l’implantation verticale des équipements.
La situation n°1 représente le pont roulant positionné au dessus de la plateforme de la Batmobile en position basse. Les bras robotiques en position initiale, passent au dessus de la Batmobile.
La situation n°2 représente la plateforme de la Batmobile en position haute. Les dimensions du pont élévateur assure le bon positionnement verticale de la plateforme par rapport au sol du niveau supérieur. Le dégagement du pont roulant permet l’élévation de la plateforme.
Simulation fonctionnelle 3D
L’intérêt de la simulation fonctionnelle en 3D, autrement dit visualiser à ce stade de la conception du projet, la mise en mouvement coordonné des équipements industriels composants l’atelier robotique de la Batcave du projet BATLab112, est double. Si la conception 3D permet une mise en situation statique des objets, la simulation 3D permet une appréhension plus fine des comportements dynamiques de ces objets. Cette approche a permis notamment d’expérimenter différents types d’organisation de l’atelier sans avoir besoin de réaliser de prototypes.
Modélisation 3D
FreeCAD
La modélisation de l’atelier de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
La simulation fonctionnelle 3D de la version présentée de la configuration de l’atelier est satisfaisante, notamment la cinématique de la Batmobile et de l’ensemble ; pont roulant et bras robotiques. La conception préliminaire de chacun des quatre équipements est donc validée.
La conception préliminaire de la plateforme rotative fait suite à la phase d’étude des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
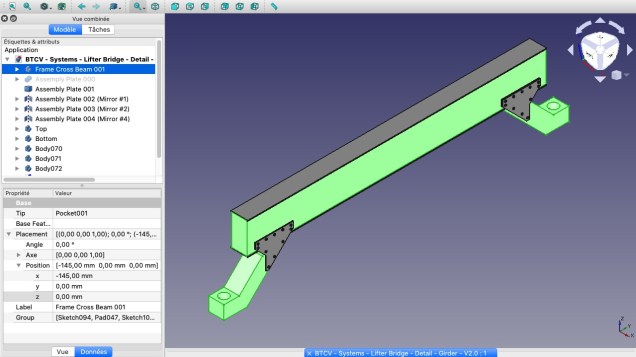
Le concept du pont élévateur bipoutre 4 colonnes est l’association de deux concepts industriels, le pont élévateur 4 colonnes et le pont suspendu bipoutre. Les deux poutres se déplacent selon un axe vertical grâce aux actions synchronisées des 4 colonnes de levage. Chaque poutre est entrainée par 2 colonnes en vis-à-vis.
Dimensionnement
Le pont élévateur doit être en capacité de soulever la Batmobile dont la masse du modèle le plus lourd est de 3000 kg, ainsi que la plateforme rotative. dont la masse reste inférieure à 2000 kg. En prenant en compte un coefficient de sécurité et compte-tenu des normes en terme de capacité de levage constatée, le pont élévateur pris en référence pour le projet BATLab112 aura donc une capacité de levage d’environ 5 tonnes.
Design
Pour satisfaire aux objectifs de réalisme d’un diorama pédagogique, les designs des systèmes industriels de l’atelier du projet BATLab112 sont inspirés de designs de systèmes existants. Celui des poutres du pont élévateur 4 colonnes est inspiré de système tel que celui présenté dans la photo ci-contre.
Vues de détails
Modélisation 3D
FreeCAD
La modélisation du pont élévateur de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du pont élévateur équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
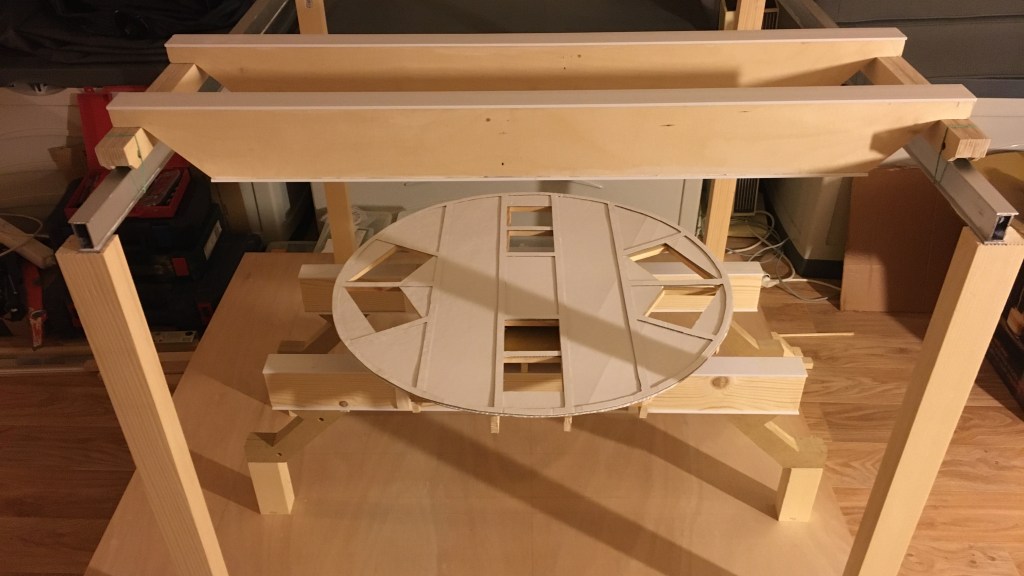
Après une phase de fabrication des principaux sous-ensembles, voici une première implantation générale du diorama de la Batcave du projet BATlab112.
Trois équipements industriels sont déjà visibles sur ce premier aperçu. Le pont roulant suspendu est le système dont la réalisation est la plus avancée. Les 4 poteaux à chaque angle du plateau, supportant les rails du pont roulant, donnent une idée du volume général du diorama. La plateforme rotative réalisée en carton est pour l’instant simplement posée sur le pont élévateur. Le pont élévateur est le système le moins avancé dans sa réalisation.
Cet article présente la conception préliminaire de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.… Lire la suite →
Enjeux de la conception préliminaire de la plateforme rotative : influence du modèle de la Batmobile
La conception préliminaire s’inscrit dans la continuité du cahier des charges défini par la méthode de gestion de projet du projet BATLab112. Cette phase a pour objectif de formaliser le design général de la plateforme rotative destinée à accueillir la Batmobile au sein du diorama pédagogique de la Batcave à l’échelle 1/12.
Parmi l’ensemble des équipements industriels miniatures intégrés au diorama du projet BATLab112, la plateforme rotative constitue un élément central dont les choix de conception conditionnent largement les étapes ultérieures du développement. Plusieurs articles antérieurs ont mis en évidence l’importance stratégique du choix du modèle de Batmobile retenu. En effet, les dimensions de ce véhicule influencent l’ensemble de la chaîne de conception en déterminant le dimensionnement des différents systèmes industriels du diorama.
Au sein de ces systèmes, la plateforme rotative occupe une position singulière, en raison de son interaction directe avec la Batmobile. Elle assure à la fois la fonction de zone de stationnement et les fonctions mécaniques de rotation et de translation verticale. À ce titre, les dimensions hors tout du véhicule constituent un paramètre déterminant, impactant directement le dimensionnement et les caractéristiques fonctionnelles de la plateforme rotative.
Les articles dédiés à la définition de la Batmobile du projet BATLab112
Principes de conception mécanique de la plateforme rotative
La structure mécanique de la plateforme rotative s’appuie sur les enseignements issus de la phase de parangonnage, au cours de laquelle une analyse comparative de plateformes rotatives industrielles existantes a été menée. Cette démarche a permis d’identifier des principes de conception éprouvés, transposables au diorama du projet BATLab112.
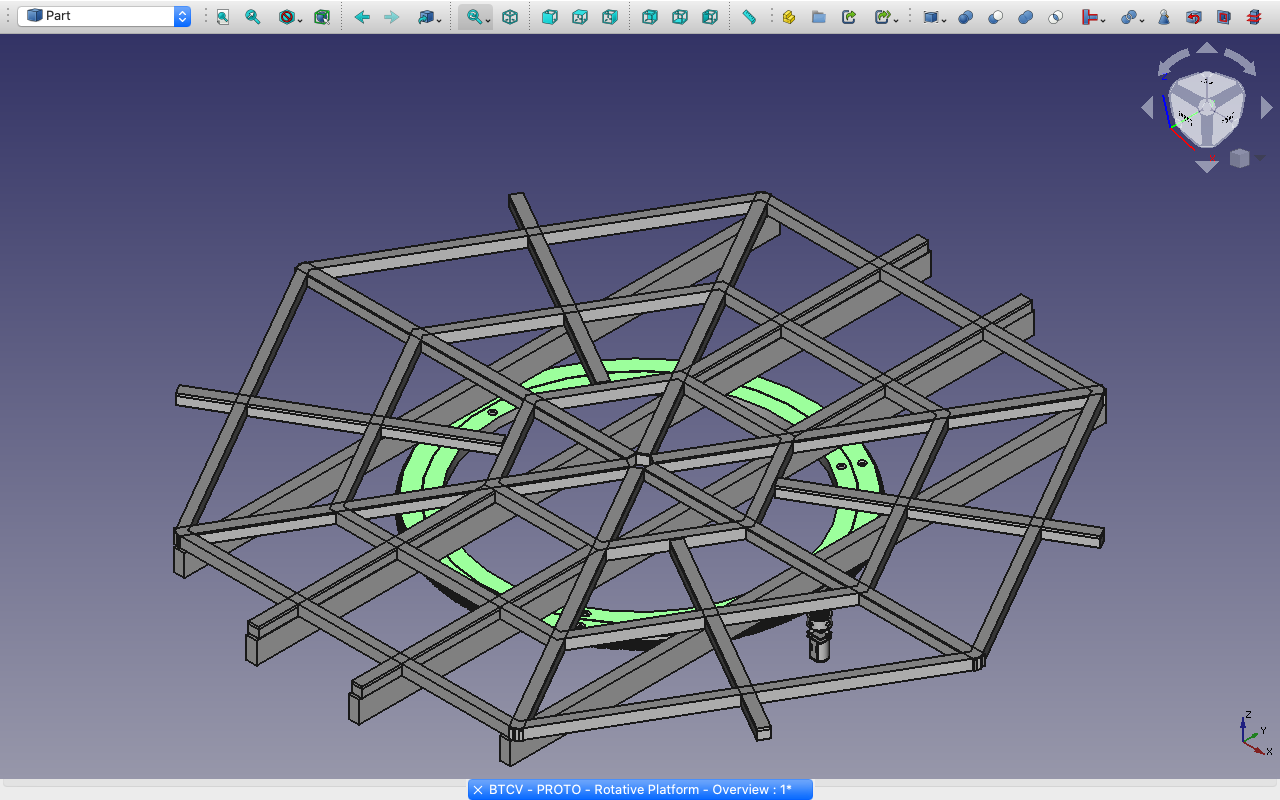
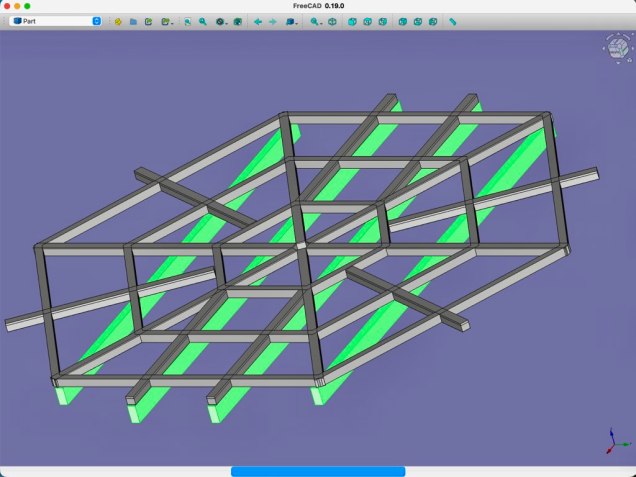
Architecture structurelle du plateau de la plateforme rotative
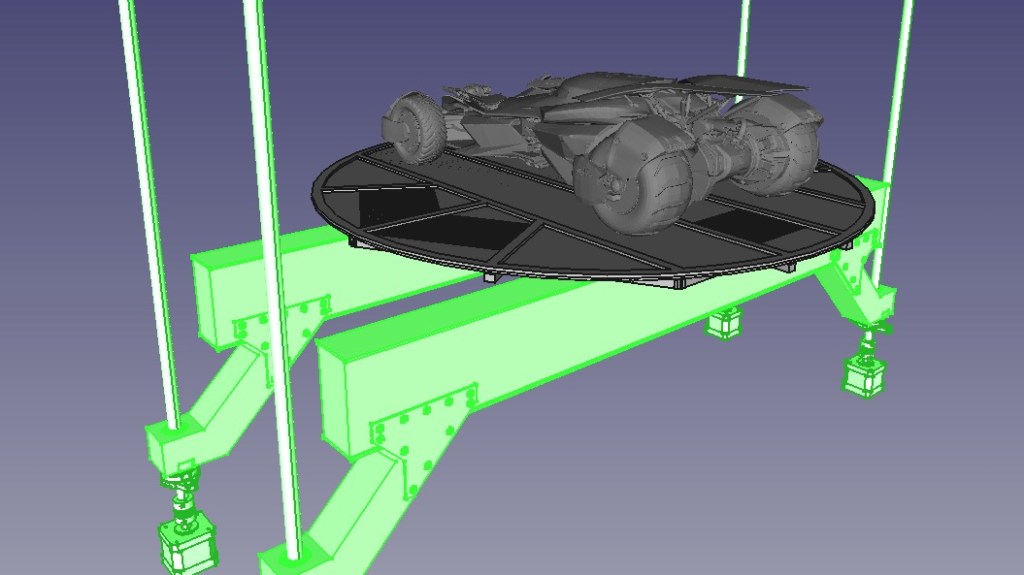
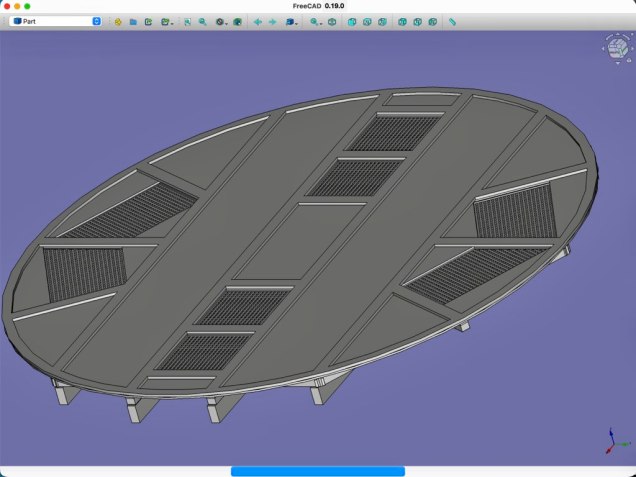
La structure portante de la plateforme est constituée de quatre longerons, définis comme des poutres parallèles orientées selon le sens de circulation de la Batmobile. Ces longerons supportent une structure alvéolaire formant un hexagone régulier, sur laquelle viennent se fixer l’ensemble des éléments constitutifs du plateau. L’ensemble de cette structure est solidaire de la bague extérieure d’un roulement à billes, assurant la fonction de rotation du système.
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la plateforme est modélisé. L’assemblage des différentes pièces n’est pas pris en compte ici.
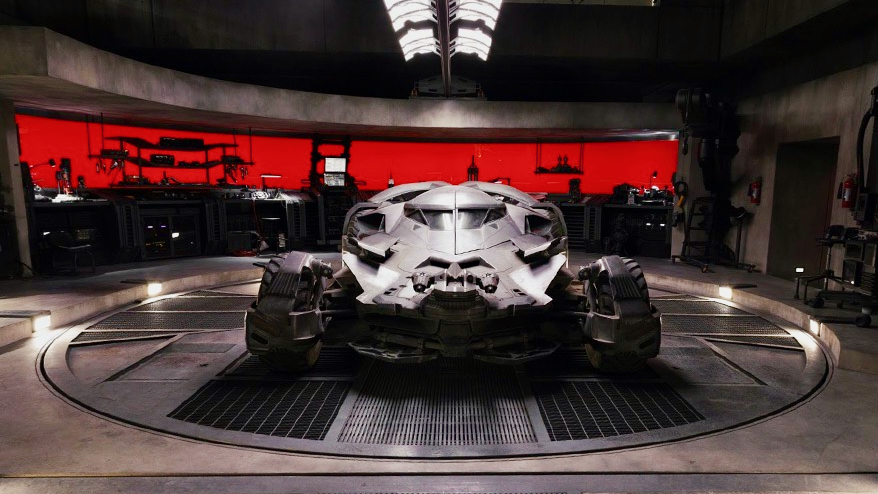
Références esthétiques et cohérence avec le modèle de Batmobile
L’apparence générale du plateau de la plateforme rotative du diorama du projet BATLab112 s’inspire directement des dispositifs visibles dans la Batcave des films Batman v Superman: Dawn of Justice (2016) et Justice League (2021). Ce choix est motivé, d’une part, par une logique de cohérence esthétique avec le modèle de Batmobile retenu pour le projet, lui-même issu de ces productions cinématographiques, et, d’autre part, par le degré de réalisme et de niveau de détail particulièrement élevé de cette plateforme au regard des différentes représentations fictionnelles de la Batcave. Parmi l’ensemble des plateformes rotatives observables dans les œuvres consacrées à Batman, celle de ces films se distingue en effet comme l’une des plus abouties sur les plans visuel, mécanique et fonctionnel, ce qui en fait une référence pertinente pour un projet à vocation à la fois pédagogique et technique.
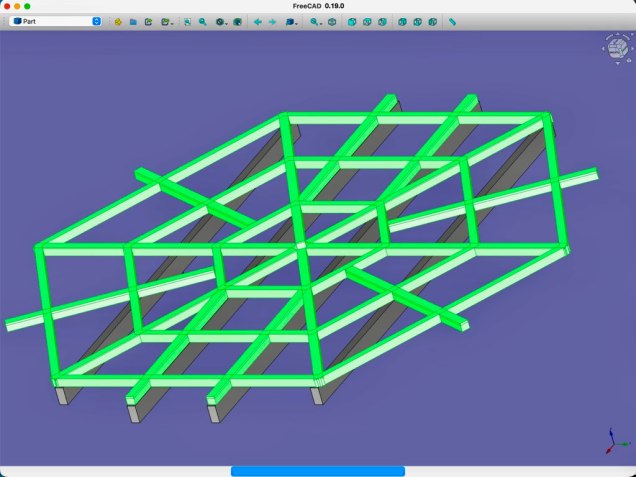
Fonctionnalité du design et contraintes mécaniques
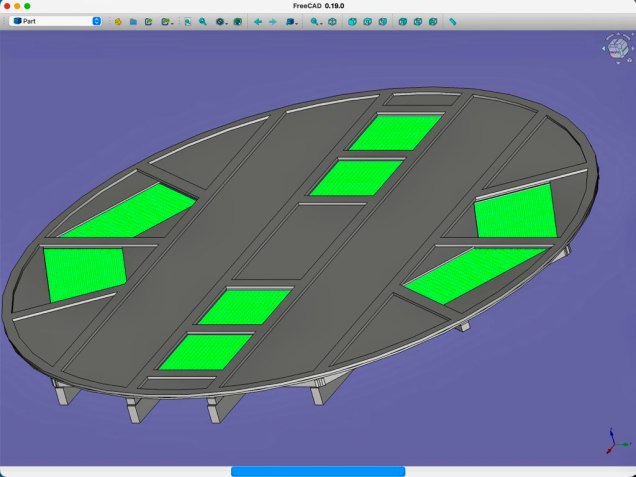
À l’échelle réelle, la plateforme rotative représentée correspond à un dispositif de six mètres de diamètre, animé d’un mouvement de rotation combiné à une translation verticale. Même à faible vitesse de rotation, le déplacement d’un plateau de cette dimension génère des phénomènes aérodynamiques susceptibles de créer une portance non négligeable. Cette portance entraîne des forces verticales pouvant provoquer des vibrations ou des sollicitations excessives sur la structure portante et sur les éléments fixés au plateau, compromettant la stabilité et la précision du système. Pour limiter ces effets, des ouïes ont été intégrées au plateau afin de favoriser le passage de l’air à travers la structure. En permettant à l’air de s’échapper plus facilement, ces ouvertures réduisent la pression exercée sur la face inférieure du plateau et atténuent ainsi les perturbations induites par la portance. Cette disposition contribue à maintenir la plateforme dans un état de fonctionnement stable, en minimisant les contraintes mécaniques et en optimisant la sécurité et la durabilité de l’ensemble du système.
Intégration environnementale : gestion de l’humidité et des écoulements
Par ailleurs, l’intégration de ces ouïes répond à des contraintes environnementales spécifiques liées à la localisation supposée de la Batcave. L’environnement cavernicole, caractérisé par une hygrométrie élevée et des phénomènes possibles de ruissellement, impose en effet une prise en compte des conditions d’exploitation du dispositif. Les ouvertures ménagées dans le plateau facilitent l’évacuation des eaux susceptibles de s’accumuler à sa surface, limitant ainsi les risques de stagnation, de corrosion prématurée des composants mécaniques et de dégradation fonctionnelle du système. Cette approche contribue à renforcer la crédibilité technique du dispositif tout en assurant une cohérence accrue entre le design de la plateforme et le contexte environnemental dans lequel elle est intégrée.
Dimensions de la plateforme rotative du projet BATLab112
L’analyse croisée des articles consacrés au parangonnage des plateformes rotatives industrielles, au cahier des charges de l’atelier automatique de la Batcave, ainsi qu’aux différentes étapes de définition et de conception de la Batmobile du projet BATLab112, permet de définir les dimensions, et plus particulièrement le diamètre, de la plateforme rotative intégrée au diorama pédagogique à l’échelle 1/12.
Apports du parangonnage industriel dans le dimensionnement d’une plateforme rotative à l’échelle 1/12
Les études de parangonnage ont mis en évidence que, dans un contexte industriel réel, les plateformes rotatives dédiées à la manutention ou à l’orientation de véhicules sont systématiquement dimensionnées à partir de l’encombrement maximal de l’objet transporté, auquel s’ajoutent des marges fonctionnelles garantissant la sécurité, la fluidité des mouvements et la compatibilité avec les systèmes périphériques. Cette logique a été transposée au projet BATLab112 afin de garantir un haut niveau de réalisme pédagogique.
Contraintes du cahier des charges de l’atelier automatique de la Batcave
Le cahier des charges de l’atelier automatique et son analyse détaillée ont ensuite permis d’identifier plusieurs contraintes structurantes : l’enveloppe globale du diorama, limitée à environ un mètre de côté, la nécessité d’autoriser une rotation complète de la Batmobile sans déplacement longitudinal, ainsi que l’intégration de la plateforme dans un système plus large comprenant un dispositif de levage et des équipements d’atelier. Ces contraintes fixent un cadre dimensionnel strict au sein duquel la plateforme rotative doit s’inscrire.
Influence du modèle de Batmobile sur le diamètre de la plateforme rotative
La définition du modèle de Batmobile retenu pour le diorama constitue un élément déterminant du dimensionnement. À l’échelle 1/12, la longueur théorique maximale de la Batmobile de référence est estimée à environ 600 mm. Sur cette base, le diamètre de la plateforme rotative a été fixé à 600 mm, valeur correspondant au minimum nécessaire pour permettre la rotation complète du véhicule dans des conditions réalistes et fonctionnelles, tout en respectant les contraintes d’encombrement du diorama.
Toutefois, la phase de conception détaillée de la Batmobile apporte un élément complémentaire renforçant la pertinence de ce choix. En effet, le modèle physique effectivement utilisé dans le diorama présente une longueur réelle inférieure à 600 mm à l’échelle 1/12. Ce constat introduit une marge dimensionnelle supplémentaire entre l’encombrement du véhicule et le diamètre de la plateforme. Cette marge contribue à sécuriser le fonctionnement du système rotatif, à faciliter les tolérances d’assemblage et à préserver la liberté de mouvement lors des phases de rotation et de levage, sans remettre en cause la cohérence globale du design.
Validation finale du diamètre pour la plateforme rotative du diorama BATLab112
Ainsi, le diamètre de 600 mm retenu pour la plateforme rotative apparaît non seulement comme une réponse directe aux contraintes issues du cahier des charges et du modèle théorique de Batmobile, mais également comme un choix robuste et conservatif, renforcé par le fait que le véhicule réel intégré au diorama est légèrement plus compact que la valeur maximale initialement considérée.
En conclusion, la plateforme rotative du projet BATLab112, dimensionnée à 600 mm de diamètre à l’échelle 1/12, constitue un compromis optimal entre réalisme industriel, contraintes d’intégration spatiale, exigences fonctionnelles et objectifs pédagogiques. La longueur effective inférieure à 600 mm du modèle physique de Batmobile confirme a posteriori la validité de ce dimensionnement et garantit une exploitation fiable et cohérente du système au sein du diorama de la Batcave.
Conception du système de transmission de la rotation
L’objectif est d’obtenir un mouvement de rotation fluide, précis et suffisamment coupleux, tout en respectant les contraintes d’encombrement propres à l’échelle 1/12.
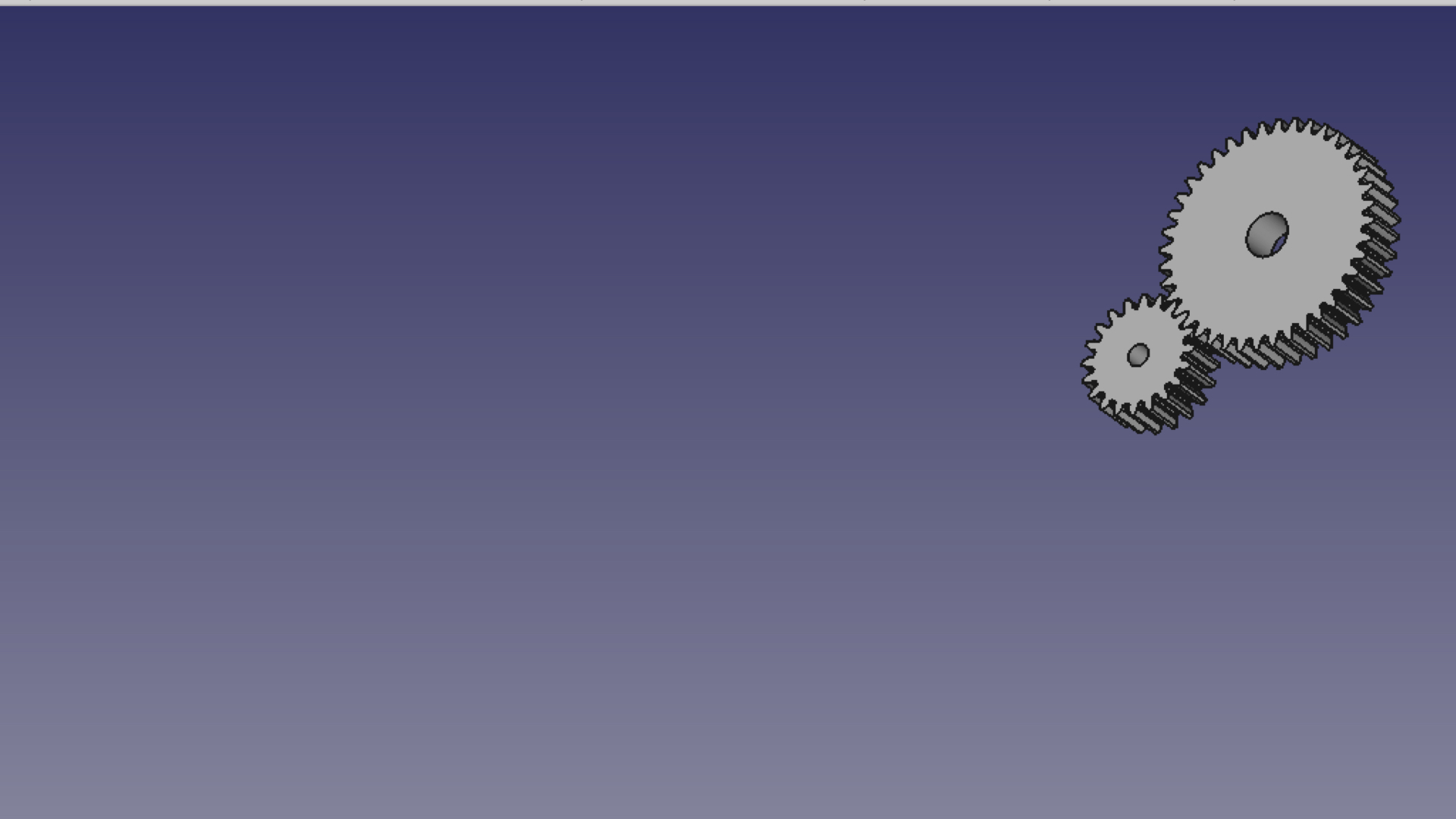
Définition des composants mécaniques
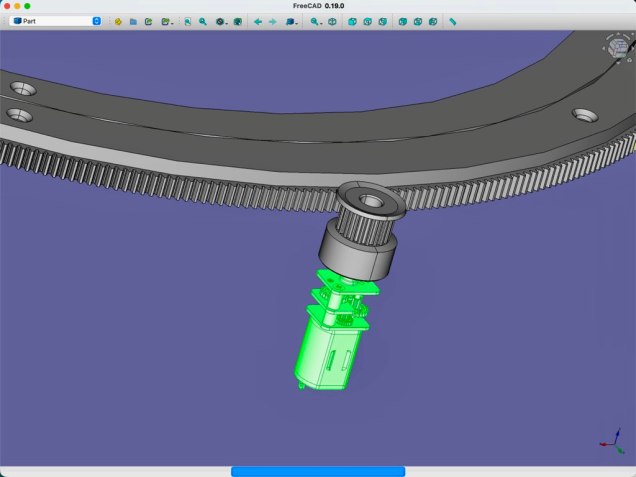
La conception du système de transmission de la rotation nécessite, dès les premières étapes, l’identification du type de moteur, du pignon d’entraînement et de la couronne dentée à utiliser. Ces choix conditionnent la faisabilité mécanique de l’ensemble, en déterminant le rapport de réduction, le couple transmissible et l’intégration à l’échelle 1/12. Sans cette définition préalable, le dimensionnement de la transmission ne pourrait être validé de manière réaliste.
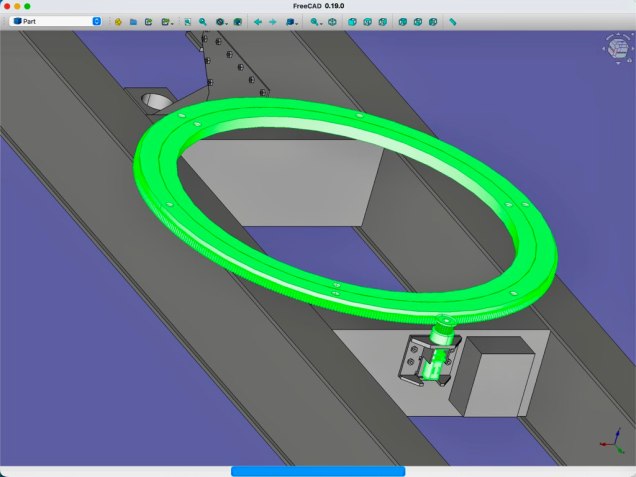
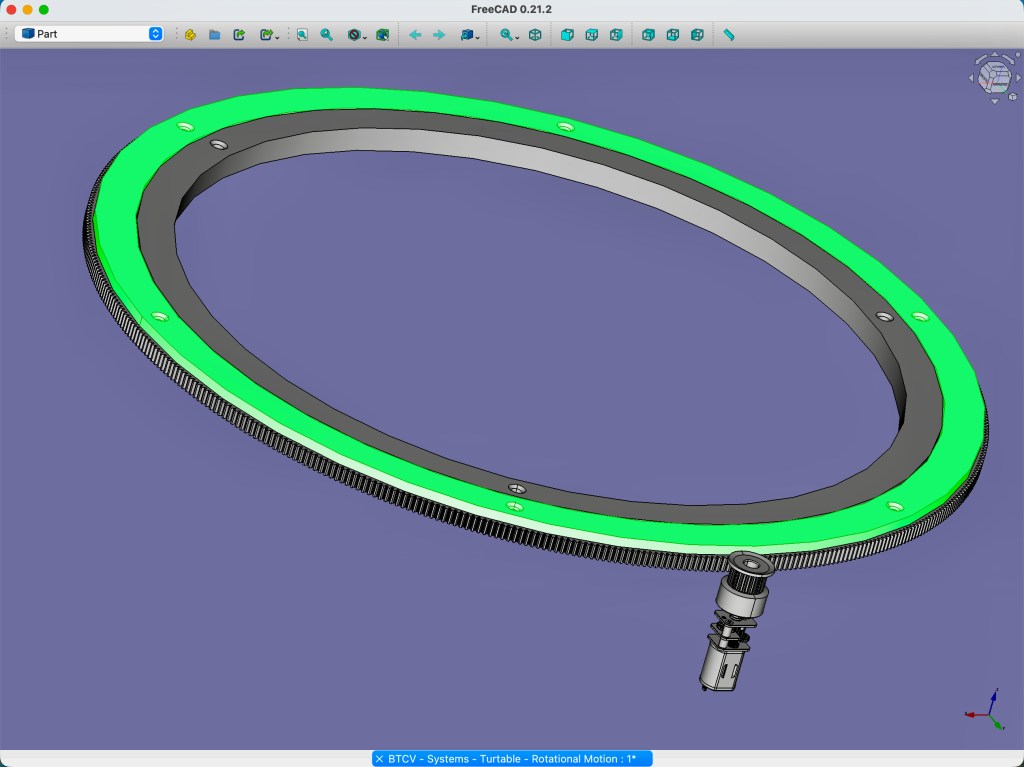
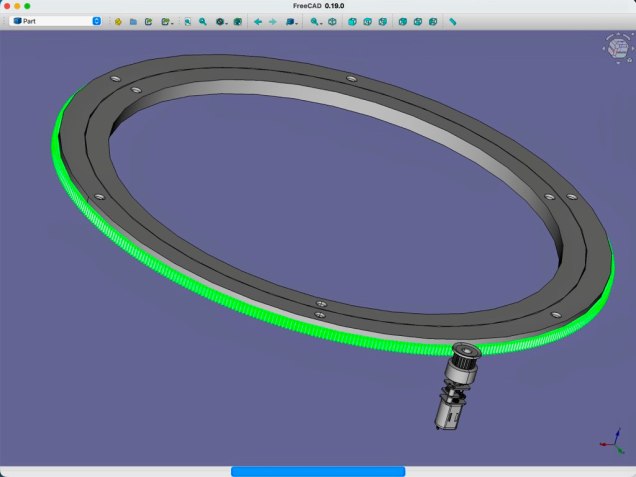
La solution retenue associe un roulement à billes de type Lazy Susan assurant le support mécanique du plateau, et un système poulie–courroie crantée utilisé comme mécanisme de transmission circulaire. La courroie, collée sur la périphérie du roulement, joue le rôle de couronne dentée, tandis qu’une poulie montée sur l’axe du moteur agit comme pignon menant. Ce choix permet de détourner des composants standards issus de l’impression 3D pour un usage en rotation continue.
Poulies
Nombre de dents : 20
Diamètre de l’axe : 5mm
Diamètre total : 15mm
Hauteur totale : 15mm
Courroie
Longueur : 2000mm
Largeur : 6 mm
Roulement à billes Lazy Susan 12″
Corps en aluminium
Billes en acier
Diamètre extérieur : 12″ – 300mm
Hauteur : 3/4″ – 19mm
Poids : 0,62 kg
Calcul du nombre de dents de la couronne
Diamètre primitif de la couronne
Dans une première approximation, compte tenu de la faible épaisseur de la courroie, nous allons considérer que le diamètre primitif est identique au diamètre intérieur du roulement Lazy Susan.
Diamètre primitif = 254 mm
Calcul du module de la couronne
La couronne utilisée est de type GT2 donc ayant un pas de 2mm. D’après la théorie des engrenages, le module est le résultat du quotient du pas, exprimé en millimètre, par le nombre π.
Module = 2 / π Module = 0,64
Calcul du nombre de dents
D’après la théorie des engrenages, la valeur du diamètre primitif est le résultat de la multiplication du module par le nombre de dents. N : Nombre de dents M : Module D : Diamètre primitif si D = M * N donc N = D / M
Nombre de dents = D / M Nombre de dents = 300 / 0,64 Nombre de dents = 469 Le nombre de dents sera arrondi à 470
Calcul du rapport de réduction
D’après la théorie des engrenages, le rapport des vitesses et égale au rapport inverse des nombres de dents. R : Rapport de réduction NP : Nombre de dents du pignon (poulie) NR : Nombre de dents de la roue (Couronne) VR : Vitesse de la Roue VP : Vitesse du pignon
Rapport de réduction = NP / NR Rapport de réduction = 20 / 470 Rapport de réduction = 0,042
Motorisation
Le dimensionnement de l’engrenage de transmission de la plateforme rotative permet de définir précisément le rapport nécessaire entre le moteur d’entraînement et la rotation du plateau.
Définition des composants mécaniques
Le choix du moteur d’entraînement du système de transmission de la rotation s’est porté sur un micro-motoréducteur à couple élevé, présentant un rapport de réduction de 1:1000. Ce type de motorisation offre un compromis adapté entre compacité, couple disponible et facilité d’intégration, en cohérence avec les contraintes mécaniques et spatiales imposées par l’échelle 1/12.
Ce motoréducteur est décliné en plusieurs versions de vitesse de rotation nominale, permettant d’ajuster précisément la vitesse angulaire du plateau rotatif en fonction du rapport de transmission retenu. Cette modularité facilite la validation de la faisabilité du système et garantit une rotation lente, maîtrisée et compatible avec l’objectif pédagogique du diorama.
La vitesse de rotation du moteur est celle du pignon dans la transmission par engrenage. Le calcul montre que la vitesse du moteur doit donc être environ 24 fois plus grand que la vitesse souhaitée de la plateforme.
R = VR / VP VP = VR * (1 / R) Vitesse Pignon = Vitesse Roue * (1/0,042) Vitesse Pignon = Vitesse Roue * 23,8
Définition de la vitesse de rotation nominale du moteur
Pour une vitesse cible de rotation de la plateforme fixée à 1 tr/min, et compte tenu d’un rapport de réduction de 24, la vitesse nominale requise du moteur est de 24 tr/min. Le motoréducteur retenu étant disponible dans une version standard à 20 tr/min, la vitesse effective de rotation de la plateforme est légèrement inférieure à l’objectif initial. Dans cette configuration, un tour complet de la plateforme est réalisé en 1 minute et 12 secondes, valeur jugée compatible avec les contraintes fonctionnelles et pédagogiques du projet.
Modélisation 3D de la plateforme rotative de la Batmobile du projet BATLab112
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire de la plateforme rotative équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.