Objet emblématique en constante mutation, la Batmobile s’impose comme l’un des symboles les plus puissants et les plus signifiants du mythe de Batman. Véhicule, armure et prolongement du corps du héros, elle condense les tensions fondamentales de son univers : entre technologie et humanité, visibilité et secret, puissance et vulnérabilité. Depuis ses premières apparitions dans les comics jusqu’aux versions proposées par Tim Burton, Christopher Nolan, Zack Snyder ou Matt Reeves, ainsi que dans les séries animées de Bruce Timm ou de la Warner Bros., la Batmobile se configure comme un véritable miroir de la psyché du Chevalier Noir et des imaginaires technologiques qui traversent les différentes périodes de son adaptation.
Si la Batmobile fascine par son apparente perfection technique et sa puissance spectaculaire, elle laisse pourtant en suspens une question centrale, rarement explorée explicitement à l’écran : qui veille sur cette machine ? Qui la répare, la modifie, l’adapte sans relâche aux exigences d’un justicier dont les missions n’offrent aucun répit ? Derrière le mythe du héros solitaire se dessine alors l’enjeu, profondément matériel, de la maintenance. Une technologie, si avancée soit-elle, ne peut se soustraire à la nécessité du soin. C’est précisément cette tension entre autonomie mythique et dépendance technique que les différentes représentations cinématographiques et animées donnent à entrevoir — souvent en creux, parfois plus directement.
Les films de Tim Burton (Batman, 1989 ; Batman Returns, 1992) offrent une Batmobile conçue comme un artefact quasi mystique : silhouettes gothiques, surfaces organiques, systèmes de défense autonomes. La machine semble surgir d’un imaginaire baroque, hermétique à toute logique d’atelier. Pourtant, cette sophistication silencieuse laisse affleurer l’idée d’un travail technique complexe, que la mise en scène choisit délibérément de tenir hors champ afin de préserver l’aura du mythe.
Les films de Tim Burton (Batman, 1989 ; Batman Returns, 1992) offrent une Batmobile conçue comme un artefact quasi mystique : silhouettes gothiques, surfaces organiques, systèmes de défense autonomes. La machine semble surgir d’un imaginaire baroque, hermétique à toute logique d’atelier. Pourtant, cette sophistication silencieuse laisse affleurer l’idée d’un travail technique complexe, que la mise en scène choisit délibérément de tenir hors champ afin de préserver l’aura du mythe.
À l’inverse, la trilogie de Christopher Nolan (Batman Begins, 2005 ; The Dark Knight, 2008 ; The Dark Knight Rises, 2012) inscrit la Batmobile — devenue Tumbler — dans un environnement rationalisé, pragmatique et militarisé. Conçue comme un prototype industriel, elle suppose une mécanique sophistiquée, des pièces interchangeables, des protocoles d’essai. Pourtant, même dans cet univers qui privilégie la vraisemblance, l’entretien n’est presque jamais montré : l’infrastructure nécessaire au maintien d’une telle machine demeure implicite, maintenue dans l’ombre.
Cette dialectique entre visibilité et dissimulation se prolonge dans The Batman (Matt Reeves, 2022), où la Batmobile apparaît sous la forme d’un moteur brut, presque féroce, conçu dans la logique d’un atelier artisanal. Chaque vibration semble attester un travail continu, une mécanique vivante façonnée au quotidien.
À l’autre extrémité du spectre, Batman v Superman : Dawn of Justice (Zack Snyder, 2016) montre une Batmobile militarisée, pensée comme un instrument de guerre — un véhicule dont la logistique d’entretien doit nécessairement être lourde, bien que le film choisisse lui aussi de la maintenir hors du cadre narratif.
Au carrefour de ces visions, la figure d’Alfred Pennyworth occupe une place déterminante. Majordome, confident, mais aussi souvent ingénieur discret, il apparaît comme le garant silencieux de la cohérence matérielle du double héroïque de Bruce Wayne. C’est dans Batman v Superman de Zack Snyder que cette dimension technique de son rôle est la plus mise en scène : Alfred y assume pleinement la fonction d’ingénieur en chef, opérant les diagnostics, supervisant les réparations et dialoguant avec la Batcave comme un véritable centre de contrôle.
Dans l’économie narrative comme dans l’économie symbolique de ces œuvres, Alfred incarne ainsi la main invisible qui veille à la pérennité de la machine et, par extension, à celle du mythe. L’entretien de la Batmobile devient alors le signe d’un équilibre subtil entre puissance et vulnérabilité : derrière la force du héros se trouve toujours un travail de réparation, de surveillance et de soin — un travail auquel Alfred donne un visage.
La série d’articles à venir, introduite ici, se propose ainsi d’explorer, œuvre par œuvre, la manière dont chaque film ou série animée articule cette question de la maintenance, de l’invisible et du soutien technique qui rendent possible l’existence même de la Batmobile. Car interroger la machine, c’est interroger la condition héroïque de Batman elle-même : un mythe qui ne tient que grâce à ceux qui, dans l’ombre, le rendent matériellement possible.
L’ultime évolution du système électronique de commande des moteurs du pont élévateur du diorama de la Batcave est en cours de mise au point.
Le remplacement de 4 convertisseurs fréquence/tension par un microcontrôleur Arduino UNO pour le traitement des signaux issus des capteurs optiques des plateformes moteurs et la transmission de données vers la console de commande.
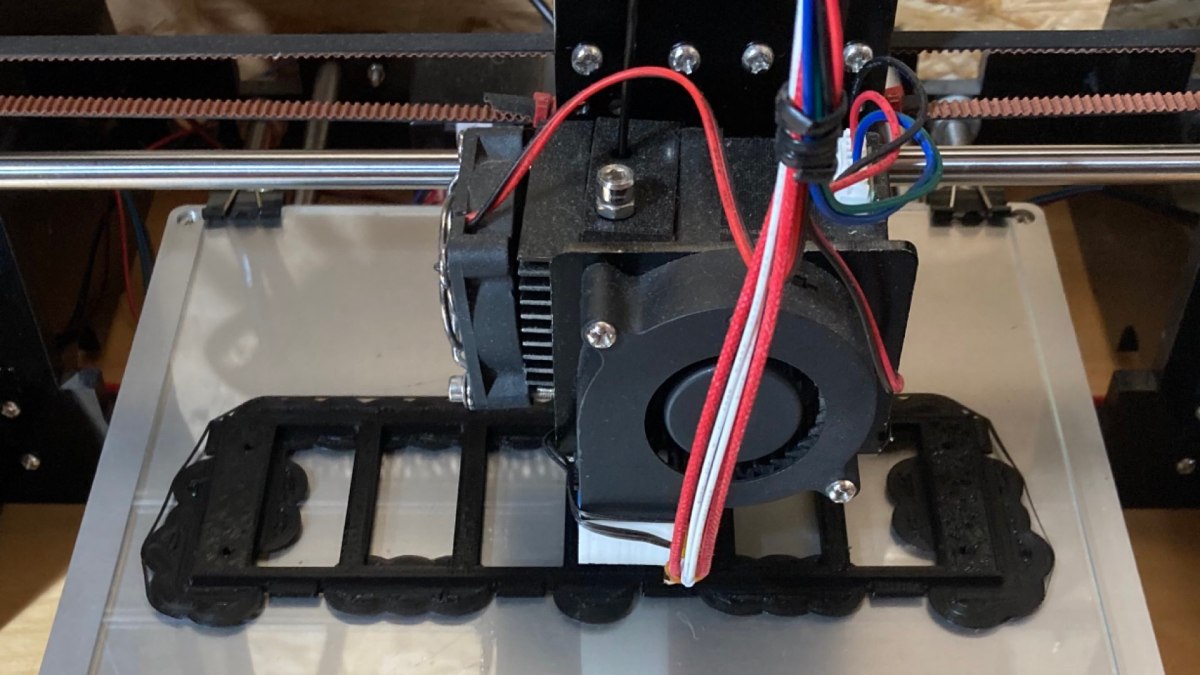
Comme mentionné dans l’article précédent consacré à ce sujet, l’imprimante 3D Anet A8 utilisée dans le cadre du projet BATLab112 m’a été prêtée. Ne disposant d’aucune expérience préalable en impression 3D, j’ai donc débuté avec cette machine dans sa configuration d’origine, en apprenant progressivement ses spécificités et ses limites. Cette initiation s’est déroulée au moment même où je cherchais une solution pour fabriquer les structures internes des armoires électriques du panneau de raccordement du diorama de la Batcave. L’apprentissage de la machine n’était donc pas abstrait : il était orienté par un objectif précis, associé à des contraintes techniques incontournables.
Pour atteindre les niveaux de précision et de qualité d’impression nécessaires à la réalisation de ces pièces, j’ai régulièrement recherché des améliorations techniques permettant d’optimiser les performances de l’Anet A8. La présente mini-série d’articles n’a pas pour ambition de dresser un inventaire exhaustif des modifications possibles pour cette imprimante. Elle vise uniquement à présenter celles qui ont été mises en œuvre dans le cadre du projet BATLab112, en réponse directe aux difficultés rencontrées lors de la fabrication des éléments du diorama.
Le warping
J’ai rencontré les premiers effets sévères de warping, c’est à dire ne pouvant pas être résolus par des bordures d’adhérence plus large, lors de l’impression des panneaux latéraux des consoles de commande. Dans un objectif de robustesse, en vue des manipulations auxquelles ils seront soumis, ces panneaux d’une taille déjà importante (environ 90x90mm), ont une épaisseur de 4mm. Les premiers modèles imprimés présentés des phénomènes de warping quelque soit la taille des bordures d’adhérence. Il faut aussi ajouter que je ne maîtrisais alors pas du tout des éléments essentiels de l’impression 3D telle que la densité de remplissage ou la régulation de la température de la buse.
L’adhésif bleu sur le plateau chauffant
Comme le montre ces screenshots Instagram, pendant la phase de fabrication des consoles de commandes, j’ai utilisé de l’adhésif bleu appliqué sur le plateau chauffant pour éviter les phénomènes de warping. Même si ce type d’adhésif est efficace pour éliminer ces phénomènes, il y a quelques inconvénients à cette méthode. Tout d’abord, il est nécessaire de recouvrir tout le plateau chauffant de l’imprimante 3D avec l’adhésif pour éviter que ce dernier se décolle. Par conséquent, même si un rouleau d’adhésif n’est pas très cher, en fonction du nombre d’impressions, la quantité utilisée peut vite être importante, et ainsi représentée un budget non négligeable, sans parler de la quantité de déchets produits. Ensuite, cet adhésif est souvent très pénible à retirer de la surface des pièces en contact avec le plateau chauffant, ce qui oblige à une phase de nettoyage assez longue et fastidieuse.
La plaque de verre borosilicate : une alternative durable
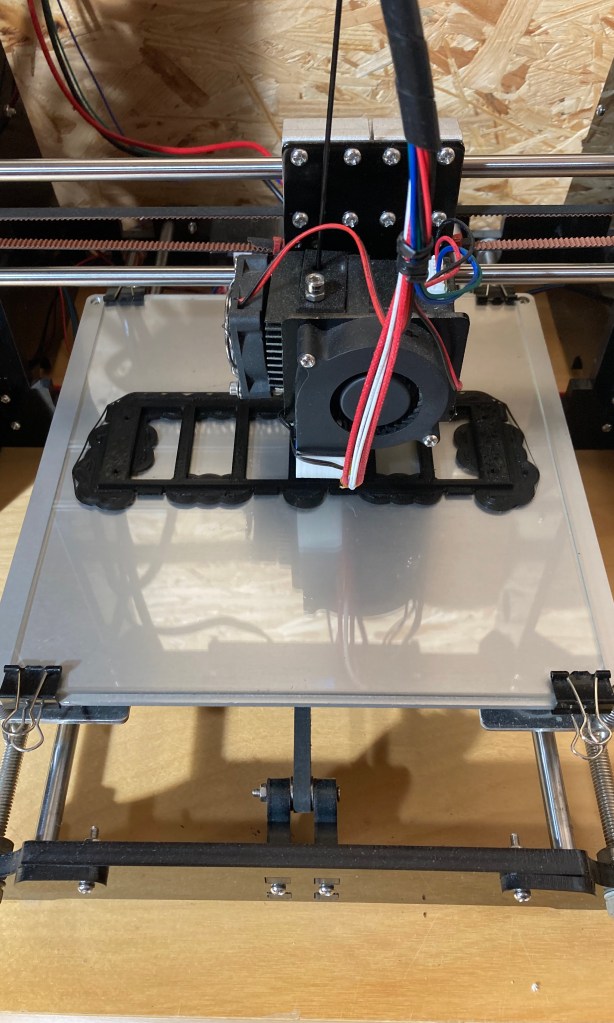
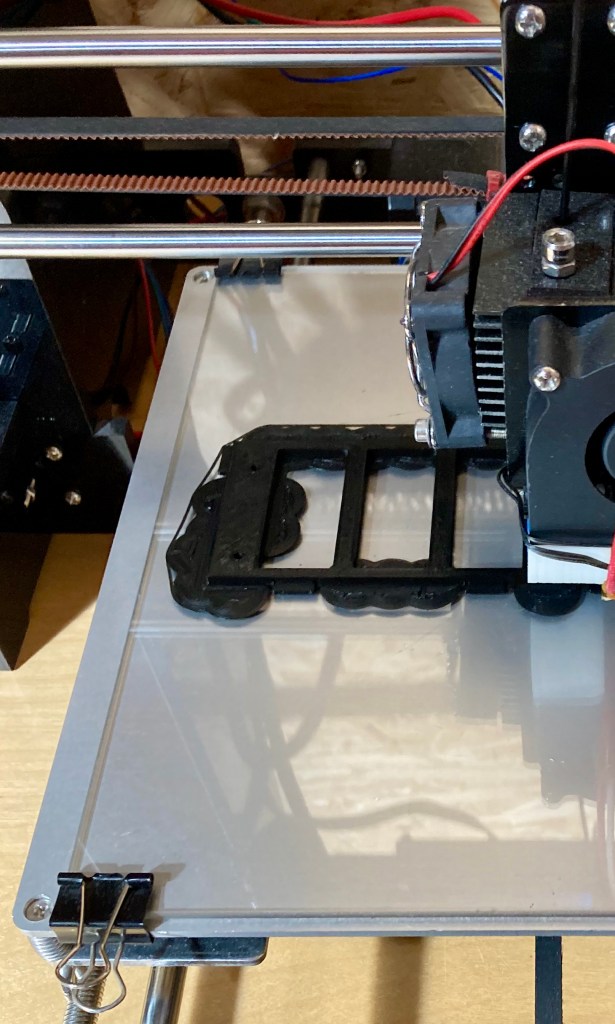
En alternative à l’adhésif bleu, j’utilise désormais une plaque de verre borosilicate fixée sur le plateau chauffant de l’imprimante 3D. Bien que cette solution soit plus coûteuse à l’achat, l’investissement se révèle rapidement rentable dans le cadre d’une utilisation régulière — en particulier pendant la phase de fabrication des structures internes des armoires électriques du panneau de raccordement du diorama de la Batcave.
L’installation de cette plaque est extrêmement simple : comme l’illustre la photographie, quatre pinces doubles de bureau suffisent pour la maintenir solidement en place. Le principal inconvénient de cette méthode réside dans la légère réduction de la surface utile du plateau chauffant, la plaque étant légèrement plus petite que le plateau d’origine. Cette contrainte reste toutefois marginale au regard des bénéfices obtenus.
Depuis la mise en place de cette plaque de verre borosilicate sur l’Anet A8 dédiée au projet BATLab112, je n’ai plus constaté de phénomène de warping sur les pièces imprimées. Bien que la plaque n’élimine pas totalement la nécessité d’utiliser une bordure d’adhérence, elle en réduit considérablement la taille. Cette optimisation permet non seulement de diminuer le temps d’impression, mais également de réduire la quantité de matière perdue, ce qui s’avère particulièrement pertinent dans un projet reposant sur des séries de pièces complexes et répétitives.
Comme mentionné dans l’article précédent consacré à ce sujet, l’imprimante 3D Anet A8 utilisée dans le cadre du projet BATLab112 m’a été prêtée. Ne disposant d’aucune expérience préalable en impression 3D, j’ai donc débuté avec cette machine dans sa configuration d’origine, en apprenant progressivement ses spécificités et ses limites.
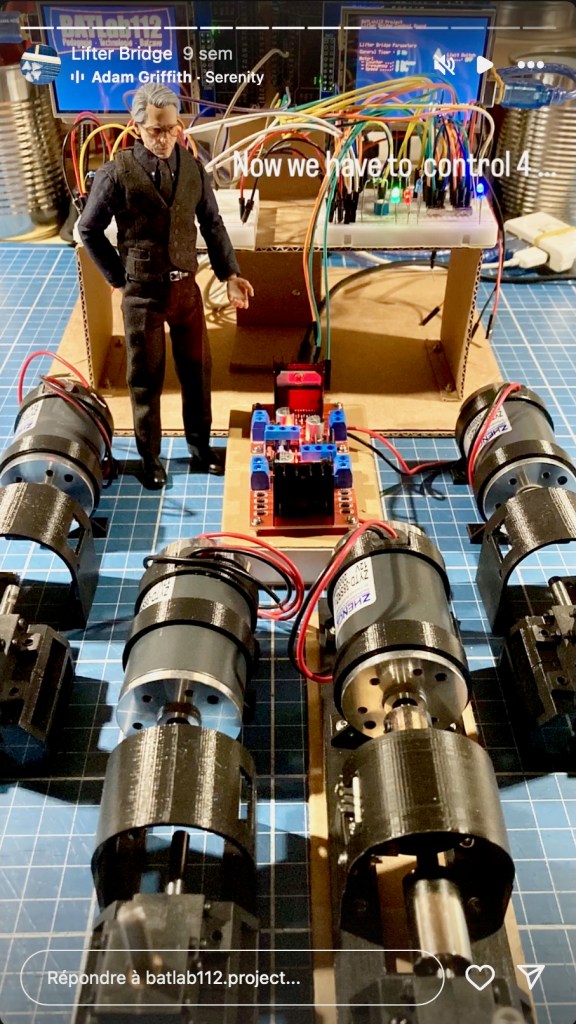
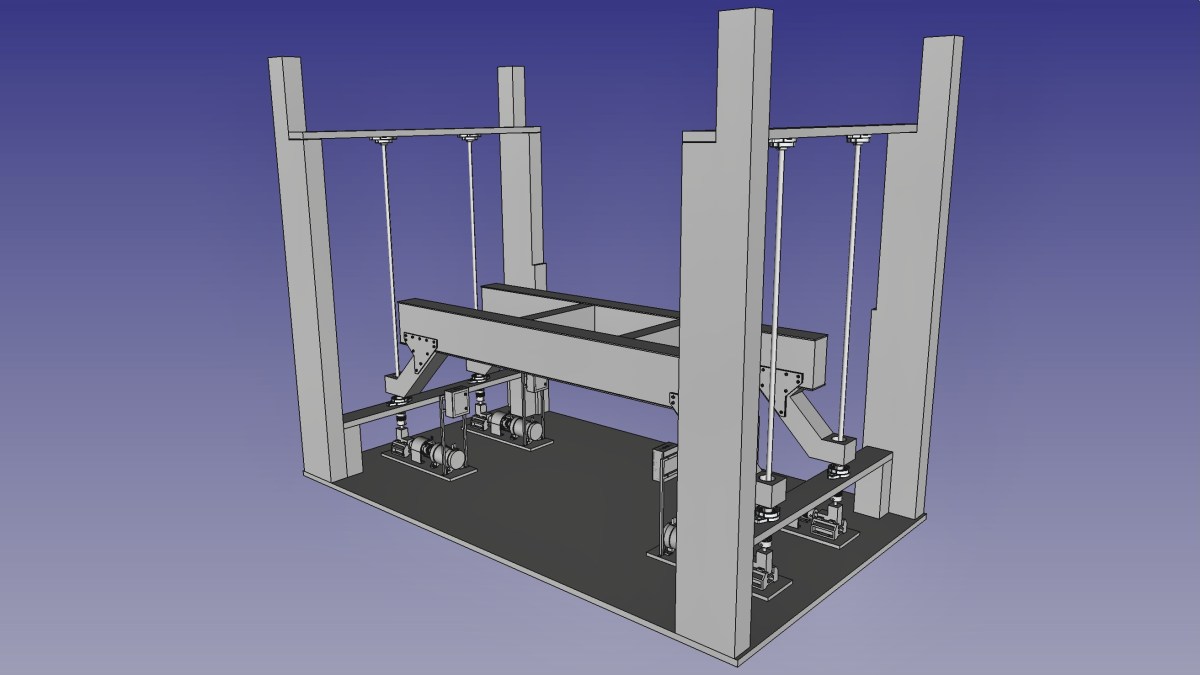
Cet article présente le premier prototype des plateformes de motorisation des axes du pont élévateur à l’échelle 1/12, du diorama de la Batcave du projet BATLab112.
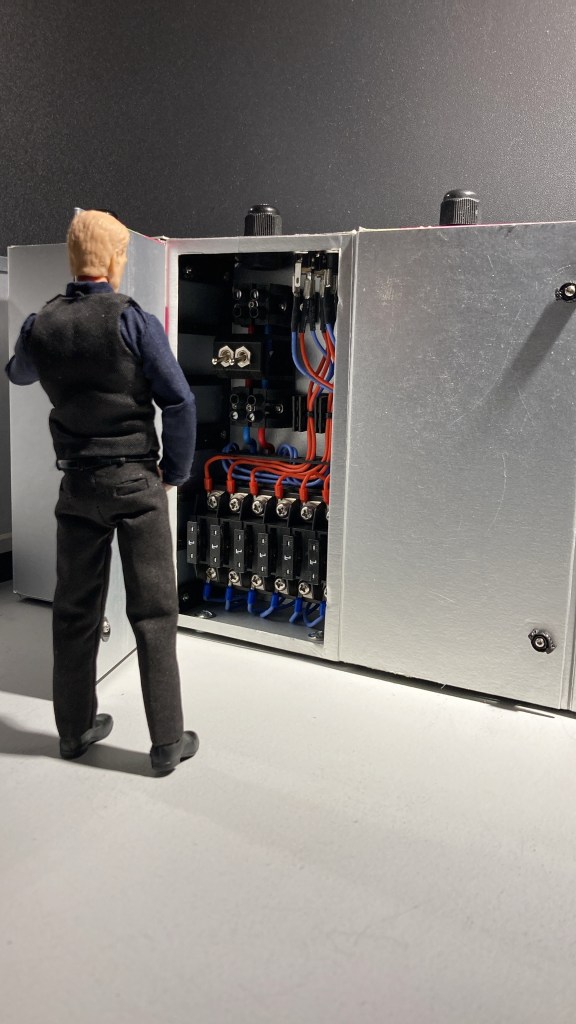
L’article présente la fabrication d’un prototype d’armoire de distribution électrique basse tension pour le diorama du projet BATLab112, conçu pour distribuer les tensions 5 VDC, 6 VDC et 12 VDC vers les consoles de commande. Il expose les retours d’expérience des prototypes antérieurs, l’impression 3D de la structure interne et la modification du design pour résoudre les échecs…
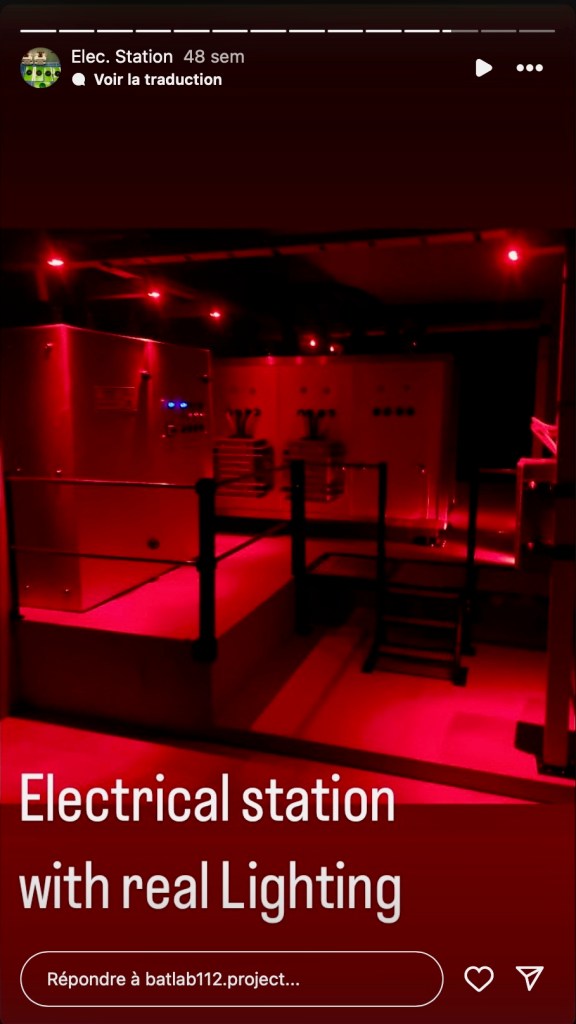
Dans The Batman (2022), le réalisateur Matt Reeves propose une réinterprétation radicale de la Batcave, marquant une rupture nette avec les représentations antérieures du mythe. En abandonnant la monumentalité technologique et l’esthétique quasi cathédrale des versions précédentes, Reeves ancre son dispositif scénographique dans une matérialité brute, inscrite au cœur de la topographie urbaine de Gotham. Située dans une ancienne station de métro désaffectée — vestige d’une infrastructure souterraine désormais obsolète — la Batcave se présente comme un espace liminal, à mi-chemin entre friche industrielle et atelier clandestin. Ce déplacement géographique et symbolique traduit un glissement de paradigme : la Batcave cesse d’être un sanctuaire isolé, lieu de retrait et de transcendance, pour devenir un interstice au sein de la ville, une zone de passage où se superposent le chaos urbain et l’intériorité tourmentée du justicier.
Une scénographie de la précarité
Sur le plan scénographique, cette nouvelle Batcave se distingue par un dépouillement quasi documentaire. Les murs de brique, les structures métalliques oxydées, la poussière omniprésente et la lumière parcimonieuse composent un environnement d’une matérialité tangible, voire triviale. L’esthétique de la friche, substituée à la grandiloquence architecturale, confère à l’espace une dimension de précarité maîtrisée : tout y paraît provisoire, réaffecté, fonctionnel. Ce choix visuel opère un recentrage du mythe sur la figure de l’enquêteur, ramenant Batman du statut de chevalier technologique à celui de détective urbain. L’équipement minimaliste — poste informatique bricolé, pont élévateur pour la maintenance manuelle de la Batmobile — souligne cette tension entre rudimentaire et contrôle, entre empirisme et obsession méthodique.
Sur le plan symbolique, la Batcave de Matt Reeves incarne un retour au réel, en réaction à l’omniprésence technologique de la vision de Zack Snyder. Elle exprime la condition d’un Bruce Wayne encore en construction, dont l’identité de Batman n’a pas encore atteint sa pleine maturité. L’espace souterrain devient ainsi le reflet d’un processus de formation : un lieu de travail, d’expérimentation et de transformation plutôt qu’un sanctuaire du secret.
Dans cette logique, la Batmobile occupe une place centrale. Loin des versions sophistiquées et futuristes des adaptations précédentes, elle apparaît ici comme une machine artisanale, assemblée manuellement. Véritable prolongement du corps du héros, elle matérialise la tension entre puissance brute et inachèvement, entre instinct et maîtrise. Son moteur brutal, ses soudures visibles, sa mécanique apparente traduisent le même principe de construction progressive qui traverse la Batcave elle-même.
Ainsi, l’ensemble de cet univers souterrain fonctionne comme une métaphore du devenir : la Batcave, la Batmobile et Batman participent d’un même mouvement d’élaboration. Tous trois incarnent un état transitoire, où la quête d’identité se forge dans la matière et la poussière. Cette poétique de l’inachevé réinscrit le mythe dans une dynamique d’authenticité et de fragilité, rappelant que le héros, avant d’être une figure de légende, est d’abord un être en train de se construire.
Conclusion
Ainsi conçue, la Batcave de The Batman se redéfinit comme un véritable laboratoire urbain, un espace liminal où se conjuguent la mémoire de la ville, la matérialité du monde et l’ombre du héros. Ni caverne mythologique ni mausolée monumental, elle devient un interstice entre le visible et l’invisible, où se fabrique, dans la pénombre du réel, la légende encore inachevée du justicier de Gotham.
Suite à la réalisation du premier prototype opérationnel, cet article présente la reprise de la conception de l’électronique de commande du pont élévateur, du diorama de la Batcave du projet BATLab112.
Cet article fait suite à la conception détaillée de l’électronique de commande et la réalisation d’un premier prototype opérationnel de l’électronique de commande du pont élévateur du diorama pédagogique à l’échelle 1/12 de la Batcave du projet BATLab112.
Les essais effectués à l’aide du montage prototype ont mis en évidence que les modules de conversion des signaux de fréquence, issus des capteurs optiques des plateformes moteurs, en signaux de tension exploitables par la carte Arduino Mega intégrée à la console de commande du pont élévateur, ne sont pas adaptés. En effet, la conversion de signaux de fréquence trop faibles génère des tensions dont les variations en amplitude, corrélées à la fréquence, sont insuffisantes pour permettre une interprétation fiable et précise par le microcontrôleur.
L’objet de cet article est double. Il s’agit, dans un premier temps, de proposer une nouvelle conception de l’électronique de commande, en remplaçant les modules de conversion fréquence/tension par des cartes Arduino, capables d’assurer directement la lecture, le traitement et la transmission des signaux issus des capteurs optiques. Dans un second temps, l’objectif est d’introduire plusieurs améliorations fonctionnelles absentes de la première version du système, notamment la mise en place d’une régulation de vitesse pour chacun des quatre moteurs assurant l’entraînement des axes du pont élévateur. Cette évolution vise à garantir un mouvement synchronisé et sécurisé de l’ensemble des plateformes, tout en offrant une meilleure stabilité et une précision accrue lors des phases de montée et de descente.
Les éléments conservés depuis la version initiale
Dans une volonté de minimiser l’impact des modifications envisagées, tant en termes de temps que de coût, certains éléments existants doivent être conservés. Cette approche vise à réutiliser au maximum les composants et sous-ensembles déjà en place, afin de limiter les interventions matérielles et de garantir la compatibilité avec l’infrastructure électrique actuelle du projet.
Les armoires électriques
L’implantation de cette électronique au sein des deux armoires électriques est conservée. Les dimensions mécaniques de ces armoires demeurent inchangées, afin de maintenir la cohérence avec les autres ensembles électriques similaires du projet.
La conception de l’agencement de l’armoire dédiée au contrôle de la vitesse et du sens de rotation des moteurs n’est que marginalement affectée par le changement de procédé de mesure de la vitesse. Cependant, l’analyse du fonctionnement du prototype a mis en évidence la nécessité d’une évolution majeure : le système doit désormais permettre de piloter la vitesse de rotation de chacun des moteurs de manière indépendante. Cette modification ouvre la voie à une régulation plus fine du mouvement de chaque axe du pont élévateur, garantissant un meilleur équilibrage et une synchronisation plus précise de l’ensemble.
Dans le montage initial, le signal issu du générateur à rapport cyclique variable, conçu à partir d’un oscillateur NE555, produit un signal carré unique distribué simultanément vers les quatre entrées des deux doubles ponts en H assurant le pilotage des moteurs. Cependant, ce dispositif, entièrement autonome et dépourvu de rétroaction, ne permet aucune régulation dynamique du rapport cyclique en fonction des variations de vitesse propres à chacun des moteurs. En conséquence, toute fluctuation mécanique ou électrique affectant un moteur se répercute sur l’équilibre global du système, sans possibilité de correction différenciée.
Schéma électronique
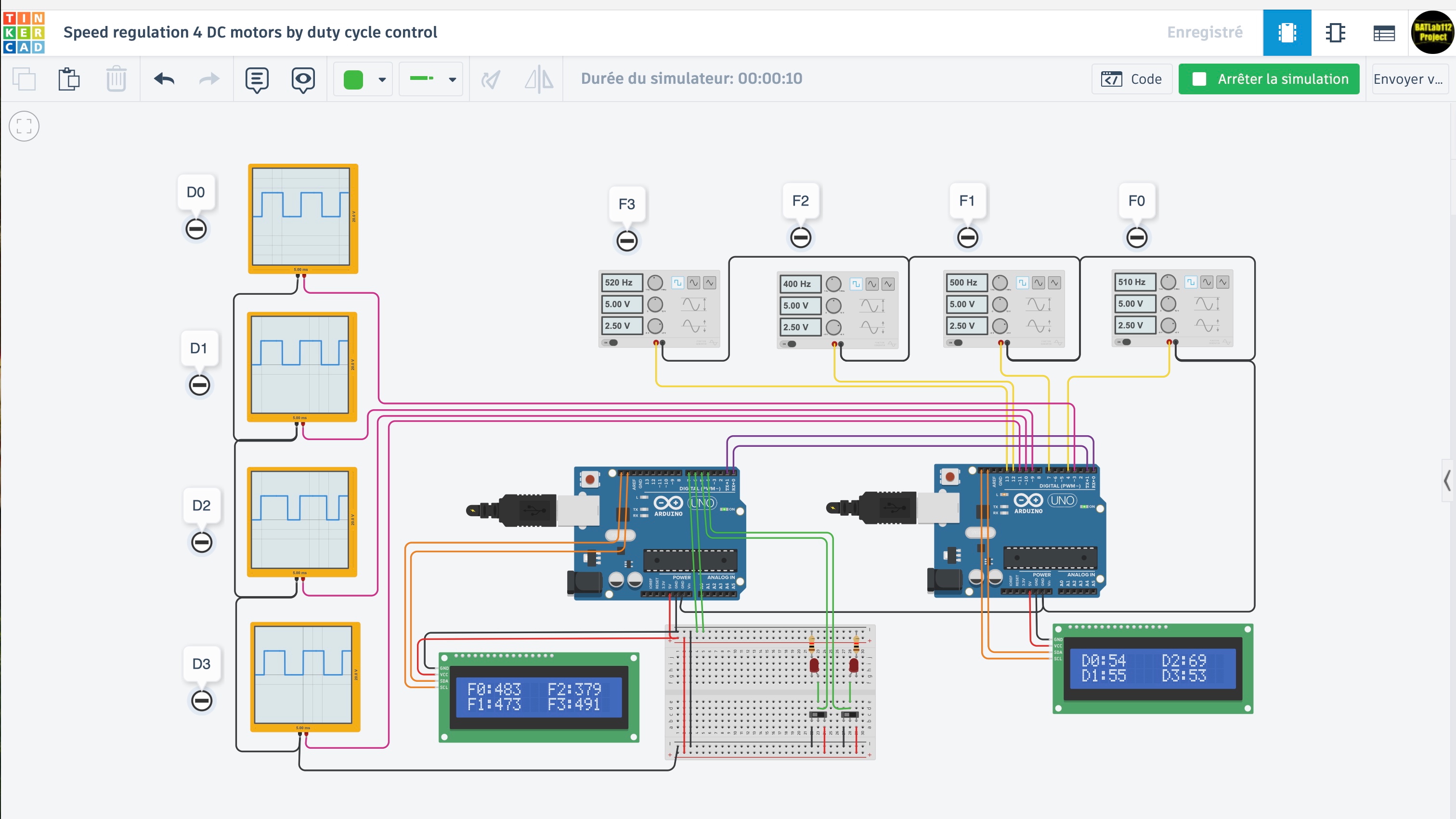
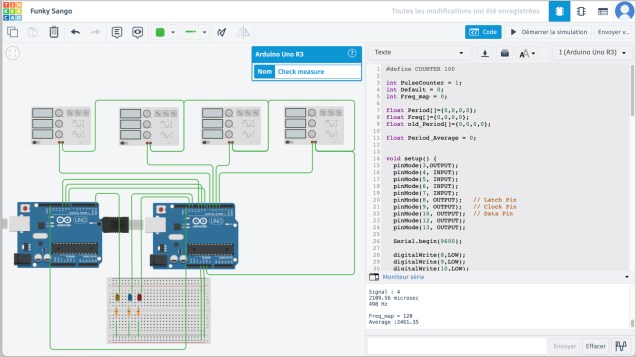
La reprise de cette conception électronique a également constitué l’occasion d’utiliser, pour la première fois dans l’avancement du projet BATLab112, l’outil en ligne TinkerCAD, dédié à la conception et à la simulation de circuits électroniques. Cet environnement virtuel a permis de modéliser les nouveaux schémas de commande avant leur réalisation concrète, facilitant ainsi les phases de test, de validation et d’ajustement. L’usage de TinkerCAD a également contribué à limiter les erreurs de conception, qui se sont déjà avérées coûteuses en temps et en ressources matérielles, en permettant d’anticiper les incompatibilités potentielles entre composants et de valider les principes de fonctionnement avant toute phase de prototypage physique.
Au centre de ce schéma, les deux cartes Arduino Uno jouent un rôle de représentation :
celle située à gauche symbolise la carte Arduino Mega 2650 utilisée dans la console de commande ;
celle située à droite correspond à la nouvelle carte Arduino intégrée au montage, dédiée à l’acquisition et au traitement des signaux électriques provenant des capteurs optiques de mesure des vitesses de rotation des moteurs.
Dans cette simulation, l’écran TFT 2,8″ associé à la carte Mega a dû être remplacé par un écran LCD I2C 16×2, en raison des limitations de la bibliothèque de composants disponibles dans TinkerCAD. Toutefois, ce remplacement s’est révélé être une opportunité technique : il a permis d’envisager une solution d’affichage local, directement au plus près des armoires de raccordement électriques. Les faibles dimensions et la simplicité de câblage de ces écrans LCD offrent de nouvelles perspectives d’intégration, notamment sur la porte même des armoires électriques.
La platine de prototypage électronique présente sur le schéma remplit quant à elle un rôle symbolique, représentant la console de commande physique du dispositif.
Enfin, les quatre générateurs de fonctions simulent les signaux issus des capteurs optiques placés sur les plateformes moteurs. Ces générateurs, réglables individuellement, sont associés à quatre oscillogrammes permettant d’observer les rapports cycliques et les signaux de commande de vitesse de rotation produits par la carte Arduino. Cette configuration a notamment permis de valider expérimentalement la régulation de vitesse des moteurs dans un environnement virtuel.
Évolution depuis la version initiale
Mesure de la vitesse de rotation des moteurs
La mesure de la vitesse de rotation des moteurs est la fonction la plus impactée par les évolutions de cette nouvelle conception. Jusqu’à présent, cette mesure était assurée par des modules de conversion fréquence/tension, qui se sont révélés inadaptés aux conditions réelles de fonctionnement et aux niveaux de signaux fournis par les capteurs.
Comme évoqué précédemment, l’objectif consiste à remplacer ces modules par une ou plusieurs cartes Arduino, chargées d’assurer l’acquisition, le traitement et la conversion des signaux de fréquence issus des capteurs optiques positionnés sur les quatre plateformes moteurs.
L’utilisation de l’outil de simulation TinkerCAD joue ici un rôle essentiel : elle permet d’expérimenter différentes configurations pour déterminer le nombre de cartes Arduino nécessaires à la gestion simultanée des signaux, ainsi que le modèle le plus approprié. Ce choix dépendra à la fois des capacités d’entrée/sortie disponibles et des contraintes d’encombrement mécanique, afin de garantir une intégration optimale en remplacement direct des anciens modules de conversion.
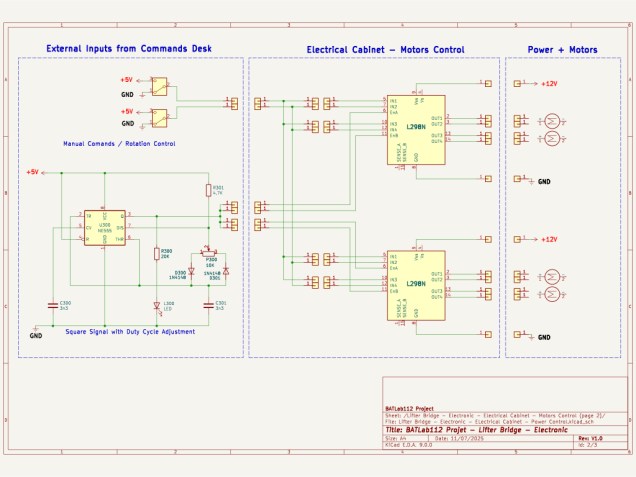
Edition des schémas électroniques
La simulation du montage électronique du diorama de la Batcave du projet BATLab112 est éditée avec l’application Web TinkerCAD.
Script d’acquisition et traitement des signaux de vitesse moteur
/**************************************************************/ /* Script for Arduino Check Measure */ /* Measures and converts the frequency values from the */ /* generators to transmit them to the second Arduino */ /**************************************************************/ #include <LiquidCrystal_I2C.h>
/**************************************************************/ /* Function : ReadPeriod() */ /* Input : The signal number of the measured period */ /* Return : none */ /* Digest : Use the Arduino pulseIn command to measure */ /* the signal period in microseconds */ /**************************************************************/ float ReadPeriod(int signal) { int pin = 0; float VarPeriod = 0; PulseCounter = 0; while(PulseCounter <= COUNTER) { VarPeriod = (VarPeriod + pulseIn(signal,HIGH)); VarPeriod = (VarPeriod + pulseIn(signal,LOW)); PulseCounter++; } VarPeriod = VarPeriod / PulseCounter; return VarPeriod; }
Limite de fonctionnement du script
Régulation de la vitesse de rotation des moteurs
Le modèle de la bibliothèque TinkerCAD de moteur à courant continu équipé d’un encodeur ne permet, à priori, pas de simuler le fonctionnement réel de l’encodeur. Cette limitation a directement conduit à adopter une approche simplifiée pour la régulation de la vitesse des moteurs. En l’absence de signaux de retour exploitables, la régulation du rapport cyclique du signal PWM de pilotage reste très rudimentaire dans cette première version du script.
À partir d’une configuration initiale des rapports cycliques fixée à 70 % :
#define DUTY_CYCLE_INIT 70
La plus petite valeur parmi les quatre vitesses de rotation simulées est utilisée comme référence pour ajuster les rapports cycliques des trois autres moteurs. Cette méthode, bien que cohérente dans le cadre des contraintes de la simulation, ne constitue pas une véritable régulation en boucle fermée : elle repose uniquement sur une logique de comparaison relative, sans mesure réelle de la vitesse issue d’un encodeur.
De plus, les délais d’exécution du code et les latences propres à l’environnement de simulation TinkerCAD limitent la précision des ajustements et induisent un comportement parfois irrégulier. Ces approximations rendent difficile toute extrapolation directe du fonctionnement simulé vers un système physique réel.
Ainsi, le script doit être considéré avant tout comme une première approche conceptuelle de la régulation multi-moteurs. Il permet de valider les principes d’organisation du code — gestion des signaux PWM, comparaison des vitesses, et synchronisation relative — tout en offrant une base solide pour une future version du programme.
Ces lignes de script déclarées en commentaire correspondent à la mise en œuvre initiale de diviseurs de fréquence appliqués aux signaux PWM générés par les broches 3, 9, 10 et 11. L’objectif de cette modification était d’augmenter la fréquence de modulation, passant d’environ 490 Hz à des valeurs supérieures à 20 kHz, afin de rendre les signaux inaudibles pour l’oreille humaine. Cette approche avait été envisagée pour améliorer le confort sonore du système lors des phases de commande moteur. Cependant, elle a été finalement mise de côté, car l’augmentation de la fréquence PWM provoquait des dysfonctionnements dans la communication I2C utilisée par l’écran LCD, rendant son affichage inopérant. Une solution alternative, consistant à utiliser des bibliothèques spécialisées telles que PWM.h, sera étudiée ultérieurement afin d’obtenir un contrôle plus fin des fréquences de modulation sans interférer avec les autres périphériques du système.
Bienfaits des limites de TinkerCAD
Les limites rencontrées lors de l’utilisation de TinkerCAD apparaissent clairement dès la conception du schéma électronique, notamment en raison de l’absence de certains composants essentiels utilisés dans le cadre du projet BATLab112, tels que la carte Arduino Mega 2560 ou encore les écrans TFT 2,8″.
Cependant, loin de constituer un frein, ces contraintes se sont révélées particulièrement formatrices. Elles ont favorisé une approche plus inventive et une optimisation du travail de conception. En effet, cette première expérience d’utilisation de TinkerCAD a permis de démontrer qu’une seule carte Arduino Uno pouvait remplacer les quatre modules de conversion fréquence/tension initiaux, tout en assurant l’acquisition et le traitement des signaux issus des capteurs.
L’absence de certains composants dans l’environnement de simulation a également encouragé la recherche de solutions alternatives et l’amélioration des montages existants. Ainsi, la nécessité d’optimiser l’utilisation des broches disponibles sur l’Arduino Uno, en nombre plus limité que sur la Mega 2560, a conduit au développement de nouvelles stratégies de communication. Parmi celles-ci, la mise en place d’un échange de données par liaison série entre l’Arduino dédié à l’acquisition et au traitement des signaux de vitesse de rotation des moteurs, et l’Arduino de la console de commande responsable de l’affichage, constitue une évolution majeure. Cette approche a permis non seulement d’alléger le câblage, mais aussi d’améliorer la modularité et la clarté fonctionnelle du système.
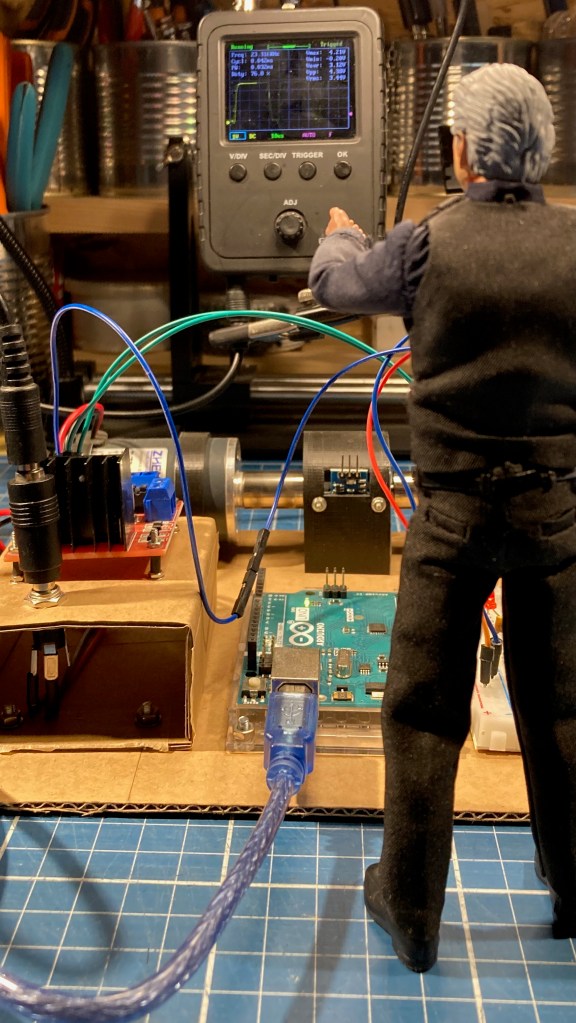
Prototypage de validation
Maquette de prototypage
Cette maquette de prototypage est destinée à valider le câblage ainsi que le fonctionnement de la carte Arduino dédiée à l’acquisition, au traitement et à la transmission des signaux de vitesse des quatre moteurs. Elle constitue une étape préalable essentielle avant l’intégration du système complet sur le prototype fonctionnel.
Adaptations par rapport au montage TinkerCAD
Dans cette version matérielle, les générateurs de fréquences utilisés dans le montage TinkerCAD sont remplacés par un clone d’Arduino Mega, chargé de délivrer quatre signaux PWM. Deux de ces signaux sont associés à un diviseur de fréquence, permettant d’alterner entre deux valeurs de fréquences distinctes afin de simuler différentes vitesses de rotation des moteurs.
La carte Arduino Uno couplée à un écran LCD, représentant la console de commande dans la simulation TinkerCAD, est remplacée par la carte Arduino Mega équipée d’un écran TFT 2,8″. Cet ensemble est directement issu de la console de commande réelle du système.
De son côté, l’écran LCD initialement utilisé sur la carte Arduino Uno en charge de la mesure, du traitement et de la transmission des informations, est désormais remplacé par un écran OLED I2C, plus compact et offrant une intégration dans l’armoire électrique.
Conclusion
Le fonctionnement général de cette maquette est validé. Les échanges entre les cartes, ainsi que la génération et la lecture des signaux de vitesse, se comportent conformément aux attentes. La prochaine étape consistera à intégrer ce montage dans les armoires électriques du prototype initial du système de commande, en liaison avec les plateformes moteurs, afin de procéder aux essais en conditions réelles.
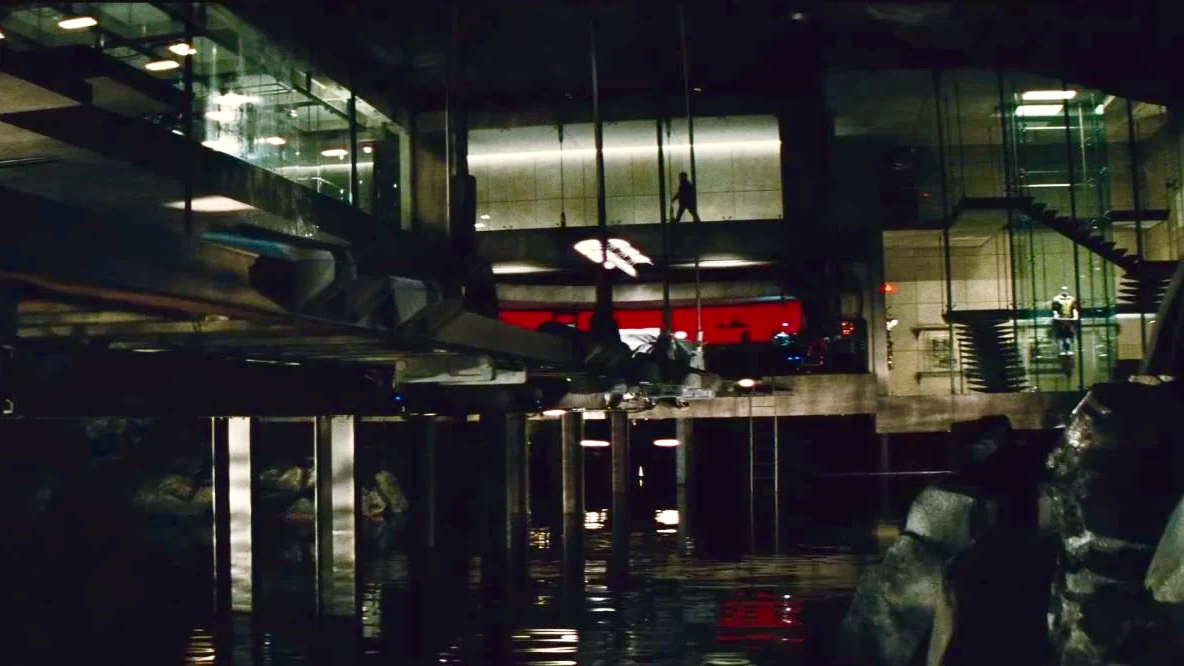
Dans le film Batman v Superman: Dawn of Justice de Zack Snyder, diffusé en 2016, la Batcave est radicalement différentes des représentations souterraines et gothiques héritées de Tim Burton ou de Christopher Nolan. Elle est conçue comme un espace épuré, fractionné en ilots lumineux, dans une atmosphère presque clinique, qui traduit à la fois l’évolution du personnage de Bruce Wayne et la reconfiguration symbolique de son rapport à la technique. La scénographie repose sur un minimalisme architectural et le refus de l’iconographie cavernicole qui caractérisait les itérations précédentes.
Un espace transparent et rationalisé
Loin des grottes humides et ténébreuses des versions antérieures, la Batcave de Zack Snyder adopte les codes visuels de l’architecture contemporaine : surfaces vitrées, structures métalliques apparentes et plans ouverts. L’eau y demeure présente, une nappe d’eau souterraine traverse l’espace, mais elle ne constitue plus un élément menaçant ou chaotique, elle devient un signe de continuité naturelle, une trace du sous-sol maîtrisée par la technologie humaine. Cette scénographie reflète la volonté de Zack Snyder de représenter un Batman vieillissant, dont l’efficacité repose désormais sur l’ordre et la précision plutôt que sur la force brute ou l’instinct.
Le dispositif scénographique privilégie la transparence fonctionnelle : chaque élément de décor expose son usage, sans mystère ni artifice. Les murs de verre, les passerelles métalliques et la présence constante de technologies font de cet espace un laboratoire d’ingénierie plutôt qu’un repaire mythique. La Batcave devient ainsi un environnement de travail rationnel, où la dimension héroïque se dissout dans la routine technique.
La lumière blanche et froide, diffuse et calculée, remplace l’obscurité expressive des films précédents. Ce choix scénographique traduit une mutation symbolique : Batman n’est plus le chevalier de l’ombre, mais un tacticien passer maître dans l’art du contrôle et de la planification. Les écrans, les systèmes électro-mécaniques et le matériel de laboratoire omniprésents soulignent une domination technologique totale, mais également une forme de solitude. Le personnage de Bruce Wayne évolue dans un espace où chaque geste est dictée par la technologie, qui devient à la fois outil et limite.
La Batcave de Zack Snyder exprime ainsi une esthétique du désenchantement : le lieu mythique du secret héroïque se transforme en un espace d’observation et de contrôle, marqué par la froideur rationnelle du monde moderne. La scénographie se fait le miroir du personnage : vieillissant, désabusé, mais toujours rigoureusement maître de son environnement.
La Batcave comme dispositif narratif
Sur le plan narratif, la Batcave de Batman v Superman: Dawn of Justice s’affirme moins comme un sanctuaire que comme une plateforme stratégique, un espace de préparation et de calcul. Elle n’est plus le lieu du secret intérieur, mais celui de la planification méthodique. C’est depuis cette base, intégralement rationalisée, que Bruce Wayne orchestre son affrontement contre Superman, conçoit ses armes et élabore l’armure de combat. Dans cette perspective, la Batcave fonctionne comme une projection mentale du héros : un espace où se spatialise sa psyché, dépouillée, rigide, ordonnée, presque aseptisée. L’absence de décor superflu et la prédominance de la matière brute (verre, métal, roche nue) traduisent une esthétique de la fonctionnalité absolue, où chaque élément répond à une finalité opératoire. Le mythe héroïque s’y trouve ainsi ramené à une mécanique rationnelle, un dispositif d’efficacité et de contrôle, vidé de toute dimension mystique ou symbolique.
Cette interprétation se trouve renforcée par la présence d’un élément iconographique majeur : la salle des trophées, transformée en autel mémoriel. Au cœur de cet espace épuré, une vitrine expose le costume du défunt Robin, souillé par le graffiti moqueur du Joker. Cette installation scénographique, à la fois sobre et tragique, opère comme une mémoire matérielle du trauma. Elle convertit la Batcave en mausolée, lieu de recueillement et de culpabilité silencieuse. Ce fragment d’histoire personnelle, inséré dans un décor déshumanisé, révèle la double fonction de la Batcave : centre opérationnel et espace de deuil. Le contraste entre la froideur mécanique du lieu et la charge émotionnelle du costume exposé renforce l’idée d’un Batman désenchanté, vieillissant, dont la foi dans l’héroïsme s’est muée en cynisme méthodique. Le dépouillement visuel de la Batcave devient dès lors le signe d’une désincarnation progressive du héros : l’humain s’efface derrière la machine, l’émotion derrière la logique.
Ainsi, la scénographie de Zack Snyder propose une lecture métaphorique du héros postmoderne, dont l’univers est désormais industrialisé et rationalisé. La Batcave ne représente plus la caverne initiatique ou le refuge intérieur des versions classiques, mais bien un centre de commandement et de logistique. Elle n’abrite plus l’ombre du mystère, mais la lumière crue de la stratégie, celle d’un monde où le mythe s’est converti en dispositif de surveillance et où le héros, prisonnier de sa propre rationalité, ne trouve plus refuge que dans la froide transparence de la technologie.
Conclusion : une Batcave post-symbolique
La Batcave de Batman v Superman incarne un tournant dans la représentation spatiale du mythe. En substituant la transparence à l’ombre, la froideur fonctionnelle à la mystique du secret, Zack Snyder inscrit Batman dans une ère de technologie désacralisée. Le décor ne sert plus à révéler la part obscure du héros, mais à exposer la rationalisation extrême de son univers. Là où les versions antérieures de Tim Burton et Christopher Nolan faisaient de la Batcave un lieu d’émergence identitaire, Zack Snyder en fait un espace de repli contrôlé : le reflet d’un monde où la technique, devenue omniprésente, ne laisse plus place au mystère.
Dans le film Batman Begins de Christopher Nolan diffusé en 2005, la destruction de la Batcave intervient à un moment charnière du récit, marquant la fin d’un cycle fondateur. Loin d’être un simple événement spectaculaire, cet effondrement s’inscrit dans une logique profondément symbolique : celle de la mise à l’épreuve du héros. Par sa mise en scène, Nolan fait de cette séquence un moment de rupture scénographique et narrative où l’espace de la Batcave, jusque-là garant de la cohérence du mythe, se délite sous la pression du chaos.
Une scénographie de la déstabilisation
Bien que la destruction de la Batcave ne soit pas représentée de manière explicite, la séquence finale de l’incendie du manoir Wayne, provoqué par Ra’s al Ghul, en constitue la métaphore visuelle et narrative. L’intensification progressive des effets visuels et sonores culmine avec la chute du monte-charge, entraînant Bruce Wayne et Alfred Pennyworth dans les profondeurs de la Batcave. Jusqu’alors perçue comme un espace de contrôle et d’ordre, la Batcave se voit soudain plongée au cœur du chaos et de la déflagration.
La lumière joue ici un rôle déterminant dans cette déconstruction symbolique. L’obscurité naturelle de la grotte, auparavant garante de son mystère et de sa stabilité, est brutalement traversée par une lumière orangée issue des flammes. Ces éclats intermittents révèlent des fragments du décor ; poutrelles, structures métalliques, parois rocheuses, dont la visibilité fragmentée traduit la désagrégation de l’espace lui-même.
Ainsi, la Batcave, autrefois sanctuaire de retrait et d’unité, se transforme en un lieu de désordre visuel et sensoriel, où s’effondre temporairement l’ordre symbolique qui fondait l’identité du héros.
Une lecture narrative de la destruction comme passage initiatique
Sur le plan narratif, cette destruction s’inscrit dans la logique d’un rite de passage. Après la victoire apparente du héros, la chute de la Batcave marque le passage obligé par le chaos et la déconstruction de l’image du héros en formation. De ses ruines, à la fois physiques et symboliques, émerge non plus un simple justicier, mais une figure légendaire : Batman, transfiguré par l’épreuve, s’élève désormais dans l’ordre du mythe.
Cette annonce d’une renaissance consécutive à la chute, constitue un motif central dans la dynamique narrative du film. Cette thématique est explicitement formulée à deux reprises par Alfred Pennyworth : d’abord lorsque le jeune Bruce Wayne tombe dans le puits, puis plus tard, dans l’ascenseur, alors qu’Alfred examine les blessures de son maître. Sa réplique — « Pourquoi tombons-nous, Monsieur ?… Pour mieux nous relever. » — condense à elle seule la philosophie du redressement qui articule l’ensemble du récit. Ainsi, la destruction de la Batcave ne saurait être perçue comme une fin, mais bien comme le prélude à sa reconstruction annoncée, inscrivant l’espace du repaire dans un cycle symbolique de mort et de renaissance.
Conclusion
La destruction de la Batcave dans Batman Begins ne constitue pas une péripétie secondaire, mais un moment de reconfiguration fondamentale. Scénographiquement, elle traduit la perte du contrôle et la dissolution de l’ordre. Symboliquement, elle réactive la mémoire du traumatisme originel et confronte le héros à la nécessité d’un nouveau commencement. Narrativement, elle fonctionne comme un seuil, la fin d’un monde souterrain, annonçant l’avènement d’un espace de surface, plus abstrait, dans The Dark Knight.
En ce sens, l’effondrement de la Batcave chez Nolan dépasse la dimension spectaculaire du désastre : il devient un acte de purification symbolique. La destruction du refuge marque la fin de la genèse et ouvre la voie à la maturation du mythe, selon une logique de renouvellement qui fait du chaos non pas la négation de l’ordre, mais sa condition de possibilité.
Dans le film Batman Begins de Christopher Nolan, diffusé au cinéma en 2005, la Batcave se présente non pas comme un espace préexistant et achevé, mais comme un lieu en devenir, un chantier de symboles où se cristallisent à la fois la renaissance du héros et l’émergence de son dispositif mythologique. Contrairement à la version de Tim Burton où la Batcave apparaissait comme un environnement technicisé, presque monumental, celle de Nolan s’inscrit dans un rapport étroit à la matière brute, à l’élément tellurique et à la logique d’une genèse.
Une scénographie du réalisme et du désordre
La première apparition de la Batcave intervient dans un espace dépourvu d’artifice, un environnement humide, obscur, où la lumière naturelle s’infiltre difficilement. Les surfaces rocheuses suintent, les parois demeurent irrégulières, et le ruissellement constant de l’eau confère à l’ensemble une texture organique, presque vivante. Le dispositif scénographique repose sur un jeu d’oppositions : l’ombre domine l’écran, mais quelques éclats de lumière percolent, révélant ponctuellement des fragments de roche ou d’eau en mouvement. Cette composition lumineuse crée une atmosphère de liminalité, entre obscurité et clarté, entre nature et technique, entre l’homme et le mythe.
L’absence initiale d’aménagement technologique traduit une forme de nudité originelle : la grotte, encore vierge de toute intervention humaine, fonctionne comme un espace matriciel. C’est dans ce vide encore informe que Bruce Wayne entreprend la construction de son identité héroïque. La scénographie exprime alors un rapport dialectique entre le chaos et la structuration : la grotte, lieu du désordre naturel, devient progressivement le socle d’un ordre à venir, celui de la justice organisée sous la figure de Batman.
L’émergence de la technique
Au fur et à mesure de la narration, l’espace subit des transformations fonctionnelles : l’installation de plates-formes, d’éclairages ponctuels, l’utilisation d’un ancien monte charge, jusqu’à la présence du Tumbler, nouvelle incarnation de la Batmobile, qui marque la progression du héros dans la maîtrise de son environnement. Toutefois, ces ajouts demeurent visuellement discrets et partiellement dissimulés, comme absorbés par la topographie de la grotte. La technologie n’y apparaît pas comme une force invasive, mais comme une extension contrôlée de la matière originelle.
Cette approche s’inscrit dans la logique réaliste et matérialiste, qui refuse la spectacularisation néo-gothique des précédentes versions (notamment celles de Burton). Ici, la Batcave ne se donne pas à voir comme un décor théâtral, mais comme un environnement plausible, soumis aux lois de la physique et de la gravité. Ce réalisme scénographique renforce la crédibilité du dispositif narratif, tout en soulignant le rapport organique entre l’homme, son espace et sa technologie.
Symbolique de la descente et de la reconstruction
Sur le plan symbolique, la Batcave représente le lieu de la descente initiatique. Le parcours de Bruce Wayne vers les profondeurs de sa demeure familiale équivaut à une plongée dans son inconscient : il affronte la peur primordiale des chauves-souris qui, enfant, l’avait terrifié. En redescendant dans la grotte, il rejoue le traumatisme originel, mais le convertit cette fois en force de maîtrise et de création.
La scénographie soutient cette symbolique : les verticalités rocheuses, les faisceaux lumineux descendant de la surface, et le mouvement circulaire des colonies de chauves-souris composent un langage visuel de la transformation. La grotte, espace de peur, devient espace de savoir et de pouvoir. C’est dans cette matrice sombre que se forge le personnage de Batman, dont la naissance s’opère littéralement sous terre, avant toute apparition publique.
Une articulation narrative entre espace et identité
Dans Batman Begins, la Batcave ne constitue pas un simple lieu d’opération logistique. Elle agit comme un acteur narratif, au même titre que les personnages. Son état d’inachèvement au début du film reflète l’incomplétude du protagoniste. À mesure que la grotte s’équipe et se structure, le héros se définit, perfectionne son équipement, et accède à sa forme finale. La scénographie matérialise donc la dynamique de la construction identitaire : l’espace, d’abord brut, devient ordonné ; le héros, d’abord fragmenté, devient figure cohérente.
La Batcave de Nolan s’inscrit ainsi dans une logique d’intériorité et de réalisme. Elle ne relève plus du merveilleux technologique, mais du vraisemblable symbolique. En refusant l’ornementation et la monumentalité, Nolan choisit une scénographie du dépouillement : la grotte n’est plus un sanctuaire de puissance, mais une matrice psychologique, un laboratoire d’identité, et le reflet d’une philosophie narrative où l’acte de devenir Batman se confond avec celui de donner forme à son propre espace.
Retour sur l’usage tardif de la simulation électronique dans le projet BATLab112
L’utilisation de l’outil de simulation est intervenue tardivement dans le développement du projet BATLab112. Plusieurs raisons expliquent ce choix chronologique. Tout d’abord, les phases de conception et de mise au point des montages électroniques nécessaires à l’équipement du diorama pédagogique ont toujours constitué pour moi des moments privilégiés d’expérimentation et de manipulation concrète. Ces étapes de prototypage manuel répondaient à une démarche d’apprentissage active, où la compréhension passait par l’expérience directe plutôt que par la modélisation. Je ne ressentais donc pas le besoin d’avoir recours à un outil de simulation préliminaire.
Il est vrai que j’utilise depuis plusieurs années le logiciel KiCAD, un outil complet et performant de conception et de simulation de circuits électroniques. Cependant, mon usage de KiCAD s’est jusqu’à présent limité à la conception et à la documentation des schémas électriques, sans exploiter ses fonctions avancées de simulation. Cela suffisait à garantir la traçabilité et la reproductibilité des montages réalisés.
Par ailleurs, jusqu’à une période récente, je n’avais pas été confronté à des circuits dont la complexité justifiait une phase de simulation préalable. Les montages développés – qu’il s’agisse de circuits analogiques simples, comme des générateurs de signaux carrés, ou de circuits de commande manuelle pour les consoles du projet – restaient suffisamment accessibles pour être directement testés sur maquette. Il en allait de même pour les montages à base de cartes Arduino, dont la complexité tenait davantage à la programmation qu’à la structure électronique elle-même.
C’est l’échec rencontré lors du développement du système de commande du pont élévateur du diorama qui a profondément modifié cette approche. Le prototype réalisé a mis en évidence plusieurs faiblesses, tant dans la conception du circuit que dans le choix des composants utilisés. Une révision complète de l’électronique s’est alors imposée, accompagnée d’une réflexion sur l’adéquation des composants employés. Les essais ont notamment révélé les limites des modules manufacturés de convertisseurs fréquence-tension, qui se sont avérés inadaptés aux besoins spécifiques du projet.
Parmi les alternatives envisagées figure l’utilisation de microcontrôleurs Arduino, dont certains modèles compacts, tels que l’Arduino Nano, pourraient être intégrés directement à la place des modules défaillants. Cependant, la complexité de cette nouvelle architecture, ainsi que les interrogations techniques qu’elle soulève en matière de performances et de faisabilité, rendent désormais indispensable le recours à une phase de simulation électronique. Celle-ci constitue aujourd’hui une étape clé pour fiabiliser la conception et sécuriser la prochaine phase de développement du projet.
Découverte et prise en main de TinkerCAD comme outil de simulation
C’est dans ce contexte de remise en question de la conception électronique du pont élévateur que j’ai découvert les fonctionnalités de simulation de TinkerCAD.
La première approche de TinkerCAD Circuits s’est révélée particulièrement intuitive. L’environnement graphique, simplifié et accessible via un navigateur internet, permet de concevoir des schémas en quelques minutes, en disposant virtuellement des composants standards (résistances, transistors, capteurs, microcontrôleurs Arduino, etc.) tout en visualisant en temps réel le comportement du montage. Cette approche favorise une compréhension immédiate du fonctionnement du circuit, sans nécessiter l’installation d’un logiciel complexe ou la gestion de bibliothèques de composants.
La simulation intégrée offre également un avantage pédagogique indéniable : elle permet d’expérimenter sans risque matériel et de valider des hypothèses de fonctionnement avant toute phase de prototypage réel. Dans le cadre de BATLab112 School, où l’objectif est à la fois technique et éducatif, cette dimension de visualisation et d’expérimentation virtuelle peut s’avérer très pertinente.
Toutefois, les premières expérimentations ont également mis en évidence certaines limites propres à l’outil. Si TinkerCAD s’avère idéal pour simuler des montages simples ou intermédiaires, il atteint rapidement ses limites dès lors que le projet requiert des composants spécifiques, des conditions de charge complexes ou des signaux analogiques précis. Les modèles proposés restent génériques, et les réglages fins, tels que la mesure de bruit, la gestion de la fréquence d’horloge ou la caractérisation des composants, ne sont pas toujours disponibles.
Malgré ces limites, l’usage de TinkerCAD représente une étape charnière dans mon approche de la conception électronique du projet BATLab112.
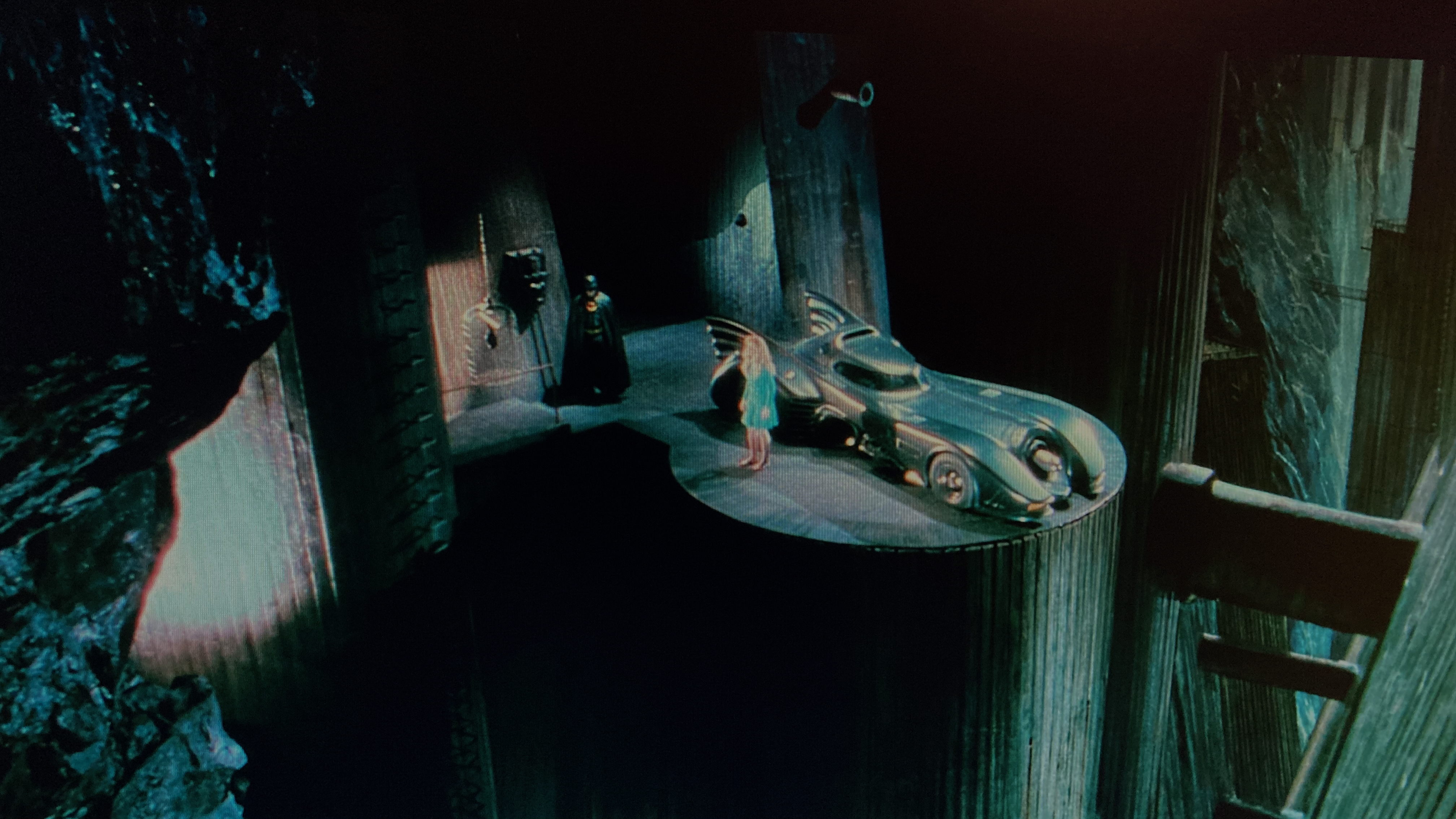
Dans le film Batman de Tim Burton en 1989, la Batcave est plongée dans une ambiance sombre où quelques éclats ponctuels de lumière artificielle contraste avec l’ombre. Elle est dominée par l’esthétique souterraine d’une grotte minérale, marquée par la rugosité de la matière. Sa scénographie emprunte largement au vocabulaire gothique et industriel : arches monumentales, parois rocheuses suintantes, dispositifs mécaniques massifs. Au coeur de ce décor monumental, un plateau principal est dominé par une vaste plateforme circulaire où trône la Batmobile, comme une relique sacrée au centre d’un sanctuaire.
L’iconographie de la roche brute s’articule à celle du métal noir dans un jeu d’ombres et de sources lumineuses qui découpent l’espace en zones de mystère et d’activité, soulignant la dimension fragmentaire du lieu. La Batcave est conçue comme un labyrinthe de pierre. Des structures métalliques s’intègrent de manière presque organique à la roche, assurant une continuité et guidant le cheminement vers une plateforme éclairée par un halo de lumière froide. Sur cette plateforme, est installé le centre technologique de la Batcave, un assemblage confus, à flanc de roche, d’ordinateurs, d’écrans et d’appareils.
Lorsque la caméra de Tim Burton nous montre la Batcave, c’est au travers du regard de Vicky Vale, lorsqu’elle découvre pour la première fois cet antre mythique. Tout, dans la mise en scène, repose sur l’exploration et la retenue : le lieu n’est pas donné d’emblée, il se dévoile par fragments, comme un secret qu’il faut mériter. L’œil du spectateur, guidé par la caméra, avance dans le lieu avec la même prudence que celui de Vicky, oscillant entre fascination et vertige. Le mouvement du cadre épouse la trajectoire de son regard : glissant lentement sur les surfaces, s’attardant sur les machines, s’élevant vers les arches monumentales. Ce n’est pas seulement une exploration architecturale, mais une traversée sensorielle.
Les mouvements de caméra, fluides et mesurés, traduisent l’ambivalence du regard : curiosité, peur, émerveillement. À mesure que Vicky s’avance, la caméra explore à son rythme, s’attarde sur les détails, effleure les surfaces, se perd parfois dans la brume. Ce parallélisme entre son regard et celui du spectateur crée une expérience presque hypnotique : la Batcave devient un espace d’initiation, un passage vers la compréhension du mythe.
Lorsque la caméra s’attarde sur Bruce Wayne, silhouette presque absorbée par les ténèbres, le contraste avec la présence lumineuse de Vicky Vale prend tout son sens. Elle regarde, il se fond. Elle observe la matière, il devient ombre. Ce jeu de perception transforme la Batcave en miroir inversé : c’est moins un espace que l’on visite qu’un esprit que l’on traverse.
Burton conçoit la Batcave comme un prolongement de la psyché gothique de Batman : une matrice obscure, à la fois de contrôle et d’introspective. Loin d’un simple décor fonctionnel, la Batcave devient ici une architecture mentale, qui matérialise l’intériorité tourmentée du héros dans un espace à la fois naturel, architectural et psychique.
La dualité scénographique, entre nature et artifice, exprime le déchirement intérieur de Bruce Wayne, partagé entre humanité et brutalité, entre héritage familial et croisade nocturne.