Cet article présente la réalisation du prototype des bras robotiques qui équipent l’atelier de la Batcave du projet BATLab112. L’objectif de ce prototype est de permettre la validation de la conception du design général ainsi que le choix de fabrication par impression 3D.
Modélisation 3D

Logiciel de CAO 3D
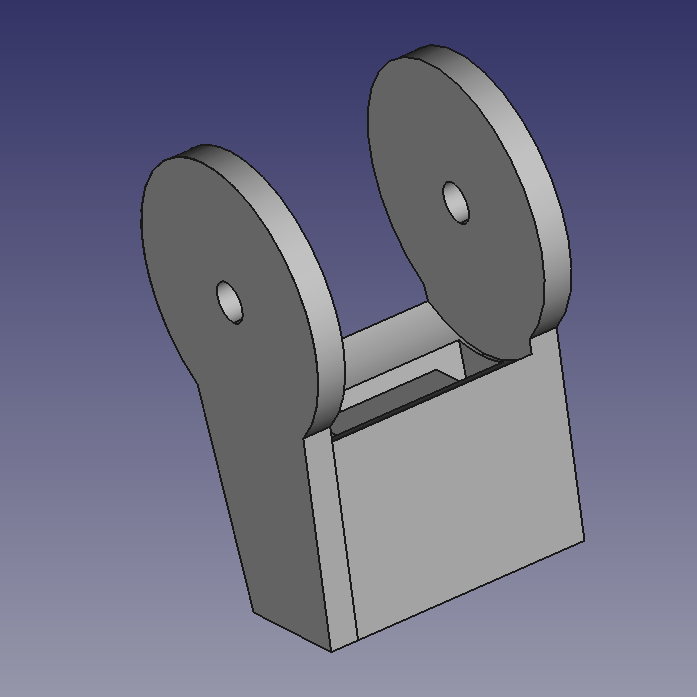
La modélisation 3D des bras robotiques de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.17.
Des bras robotiques à 4 degrés de liberté

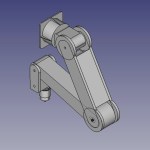
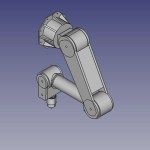
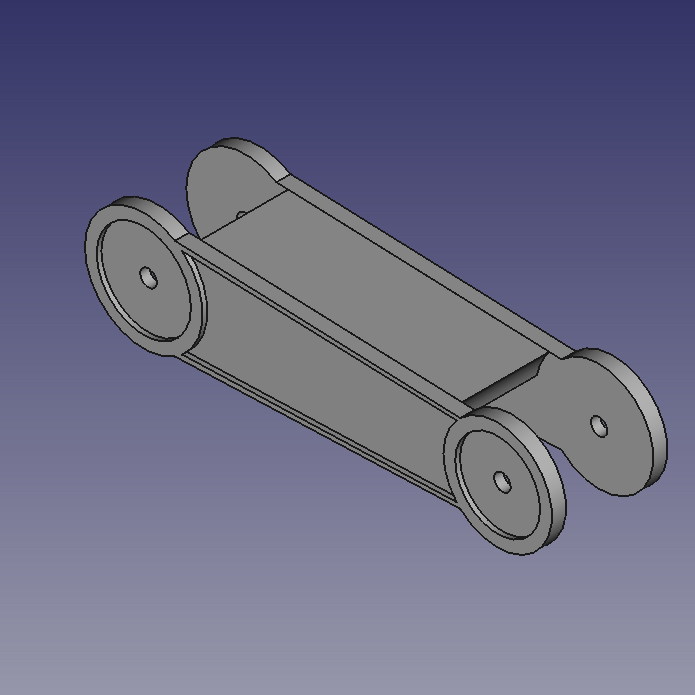
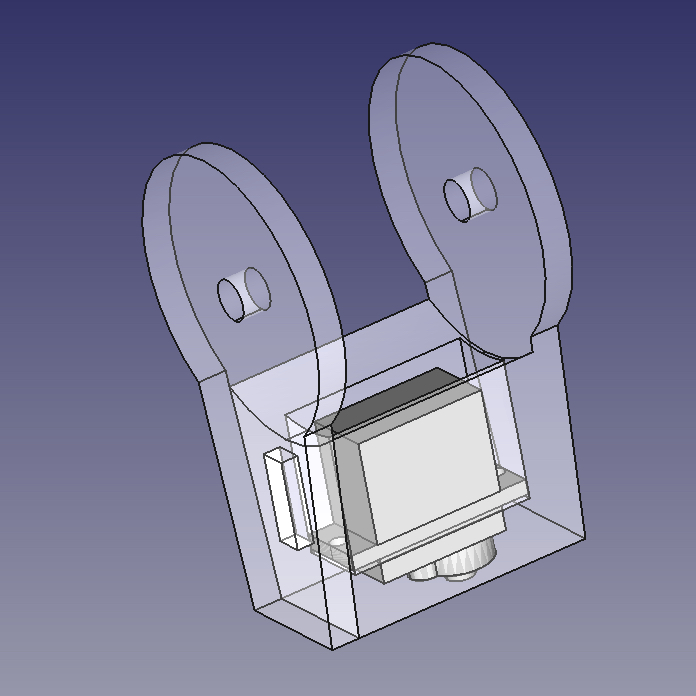
Les bras robotiques disposent de 4 degrés de liberté, autrement dit 4 articulations. Un moteur installé dans chaque articulation en assure sa rotation.
Fabrication
Impression 3D des pièces mécaniques
Les impressions 3D des premières pièces de ce prototype sont réalisées par Paul membre de la communauté de soutien du projet BATLab112, avec une imprimante ANET A8.
Motorisation des articulations
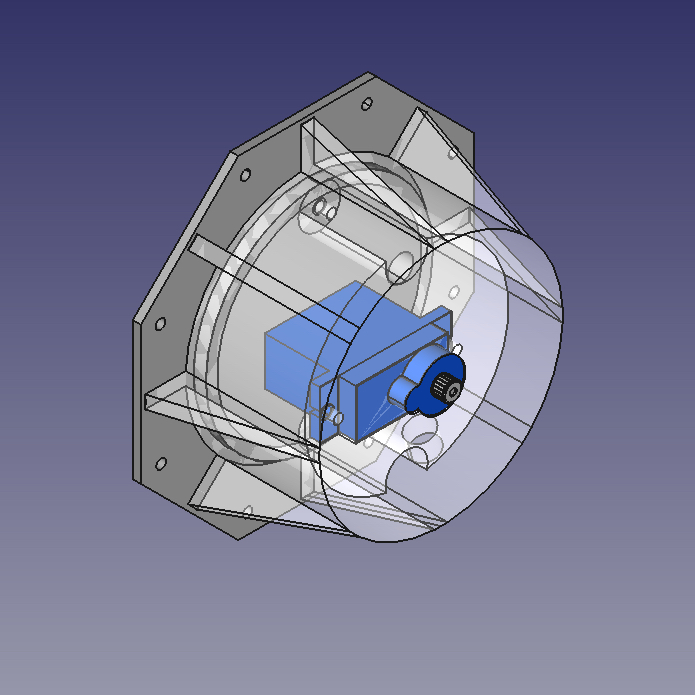
Le choix des moteurs équipant les articulations est déterminant en terme de performance pour les bras robotiques en termes de vitesse et de fluidité des mouvements. Les moteurs sélectionnés pour la réalisation de cette première version sont des servomoteurs.
Servomoteurs

Qualification de ce choix
Avantages
Alimentation électrique en courant continu
- Intégration technique facilité
- Compatibilité avec l'électronique de commande (Arduino notamment)
Asservissement en position angulaire
- Commande simplifiée
- Conforme avec la logique mécanique des articulations
Maintien de la position
- Commande simplifiée
Dimensions réduites
- Intégration mécanique facillité
Approvisionnement et coût
Inconvénients
Technologie
Cette technologie n'est pas conforme avec celle des robots industriels. Cet aspect sera pris en compte dans une futur version
Couple
Capacité incertaine à assurer le mouvement
Tests de fonctionnement
Electronique de commande
Ce test de fonctionnement utilise une électronique de commande décrite dans l’article suivant :

Commande du bras robotique .V1
Présentation de la réalisation de la première version de l’électronique de commande des bras robotisés équipant l’atelier de la Batcave du projet BATLab112.
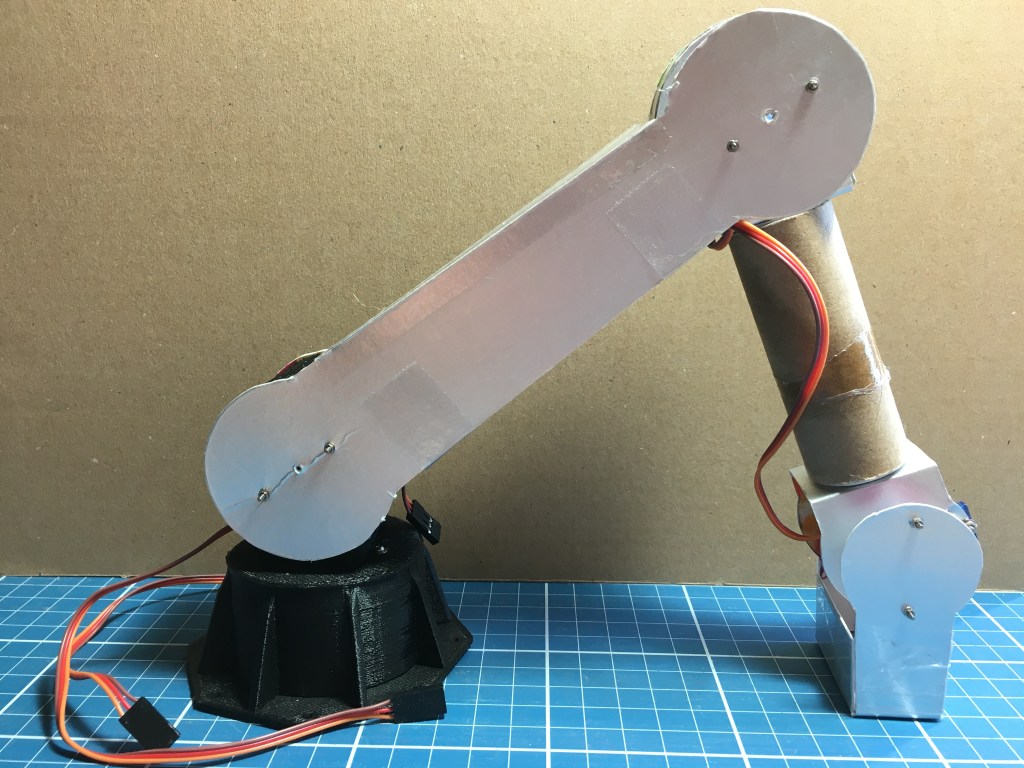
Pour valider cette électronique de commande, une maquette du bras robotique a été réalisée en emballage alimentaire. Le résultat obtenu est plutôt satisfaisant, compte tenu d’un niveau passable de qualité de fabrication, comme le montre la vidéo suivante.
Alimentation électrique
Le circuit d’alimentation électrique utilisé est le même que celui pour valider la commande électronique. Ce circuit est constitué des composants suivants :

Un convertisseur 230VAC / 12VDC – 180 W pour l’alimentation électrique des 2 convertisseurs suivants.
Source : www.amazon.fr

Un convertisseur 12V DC / 5V DC – 50W pour l’alimentation électrique de l’électronique de commande et de la carte Arduino Due.
Source : www.amazon.fr

Un convertisseur 12VDC / 6VDC – 60W pour l’alimentation électrique des 4 servomoteurs.
Source : www.amazon.fr
Test fonctionnel mécanique
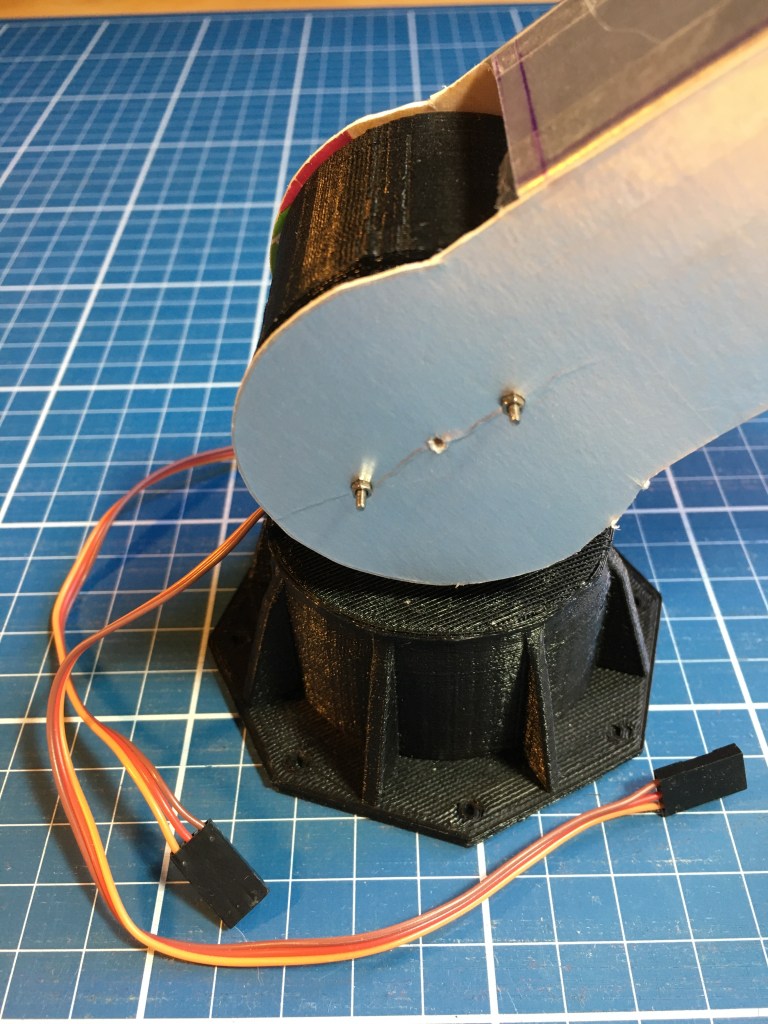
Configuration mécanique
Le montage utilisé comprend la tourelle et l’épaule en impression 3D associé uniquement au bras, réalisé en emballage alimentaire.


Résultats
Les résultats des premiers tests sont plutôt décevants. Le bras entre en oscillation très rapidement.
Plusieurs pistes sont à explorer pour résoudre ce problème :
– Le découplage de l’alimentation électrique des servomoteurs.
– La modification de la fréquence des signaux PWM émis par la carte Arduino.
– Le changement du servomoteur de l’épaule.





























{kind=link}