
Consoles de commandes
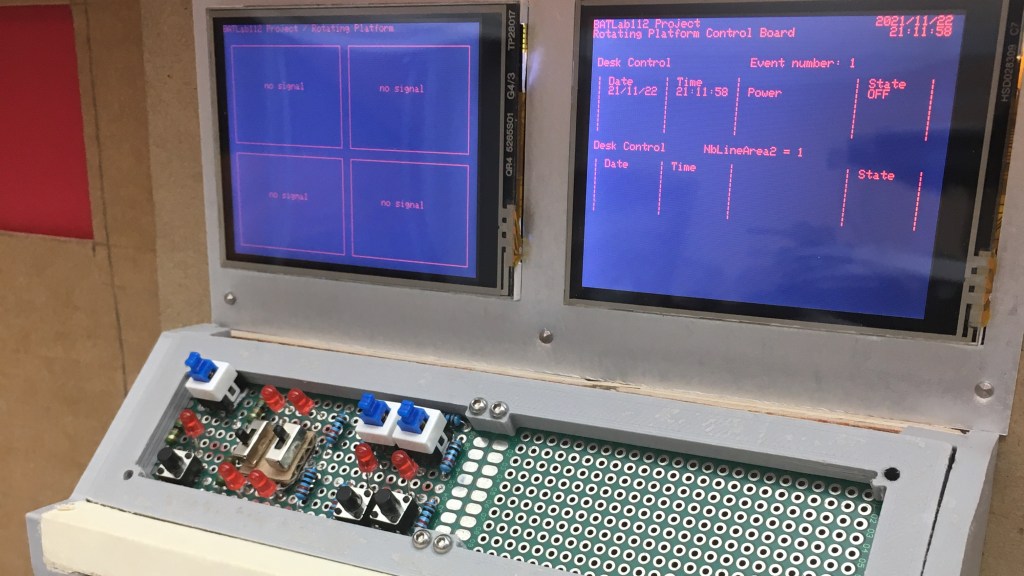
Console de commande – Prototype
Console de commande – Conception préliminaire – Ep2

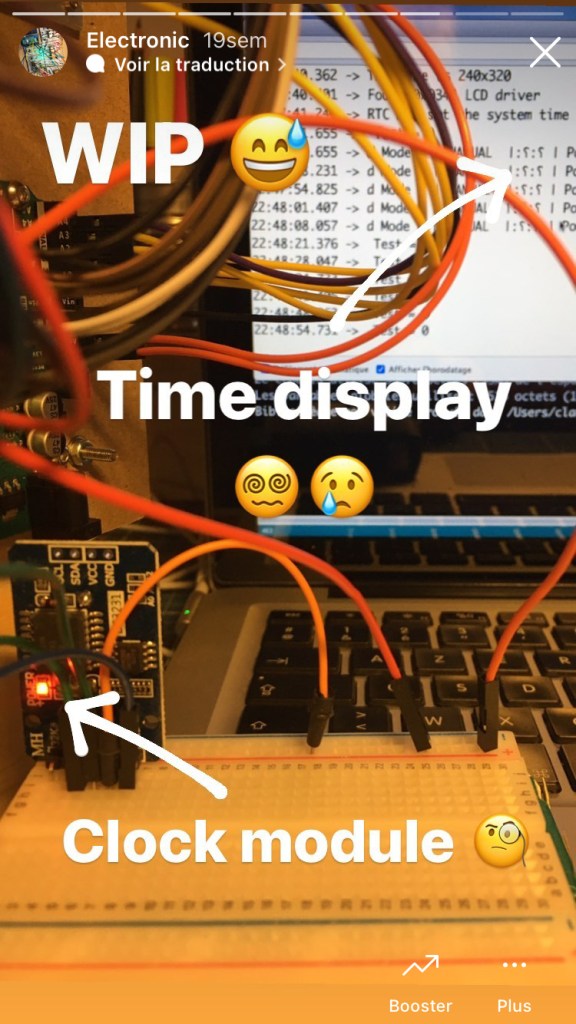
Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
Présentation générale
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.

Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
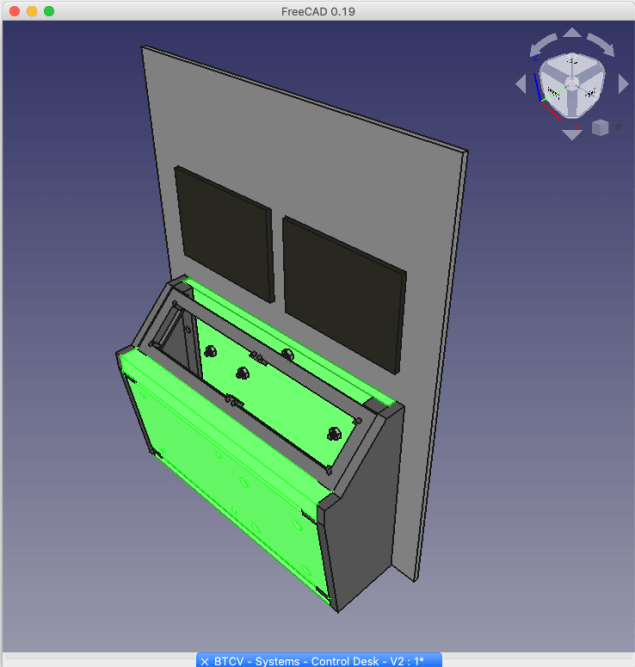
Cartes électroniques de puissance

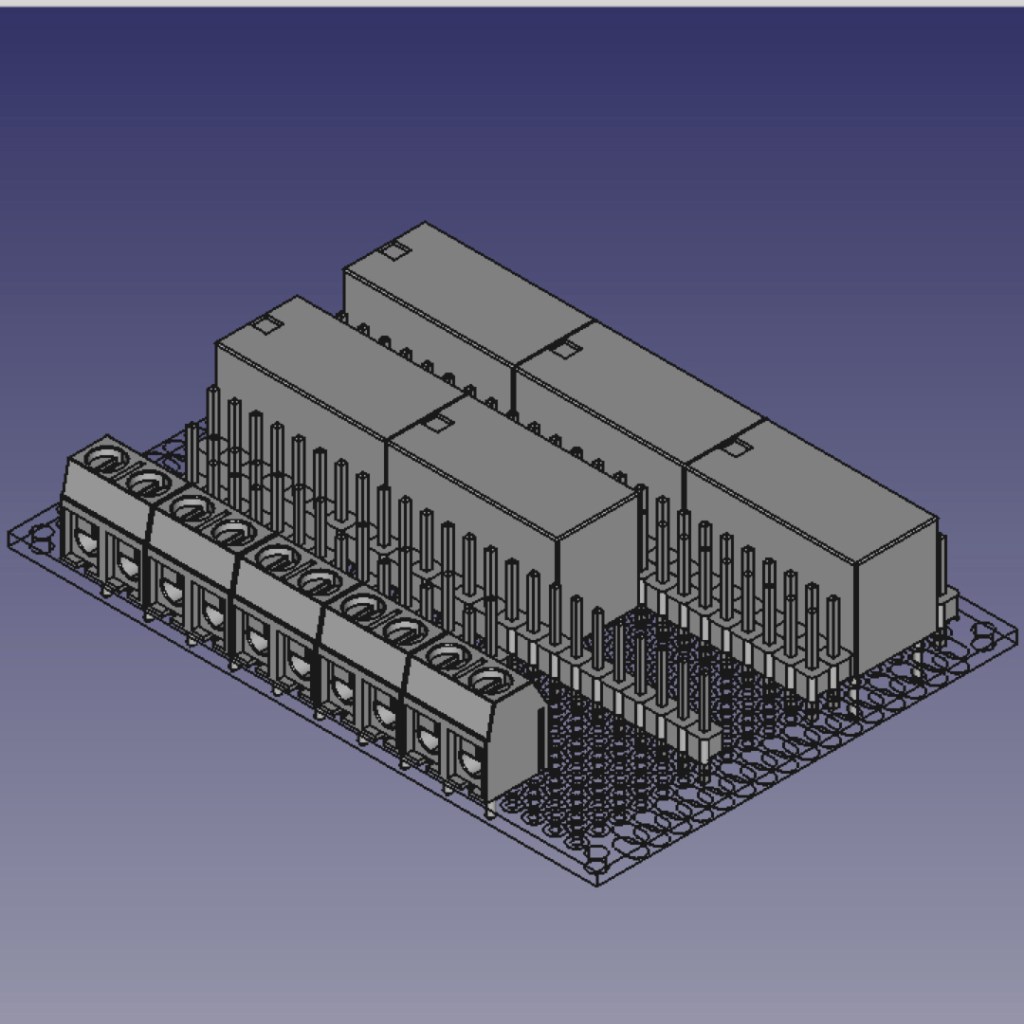

Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
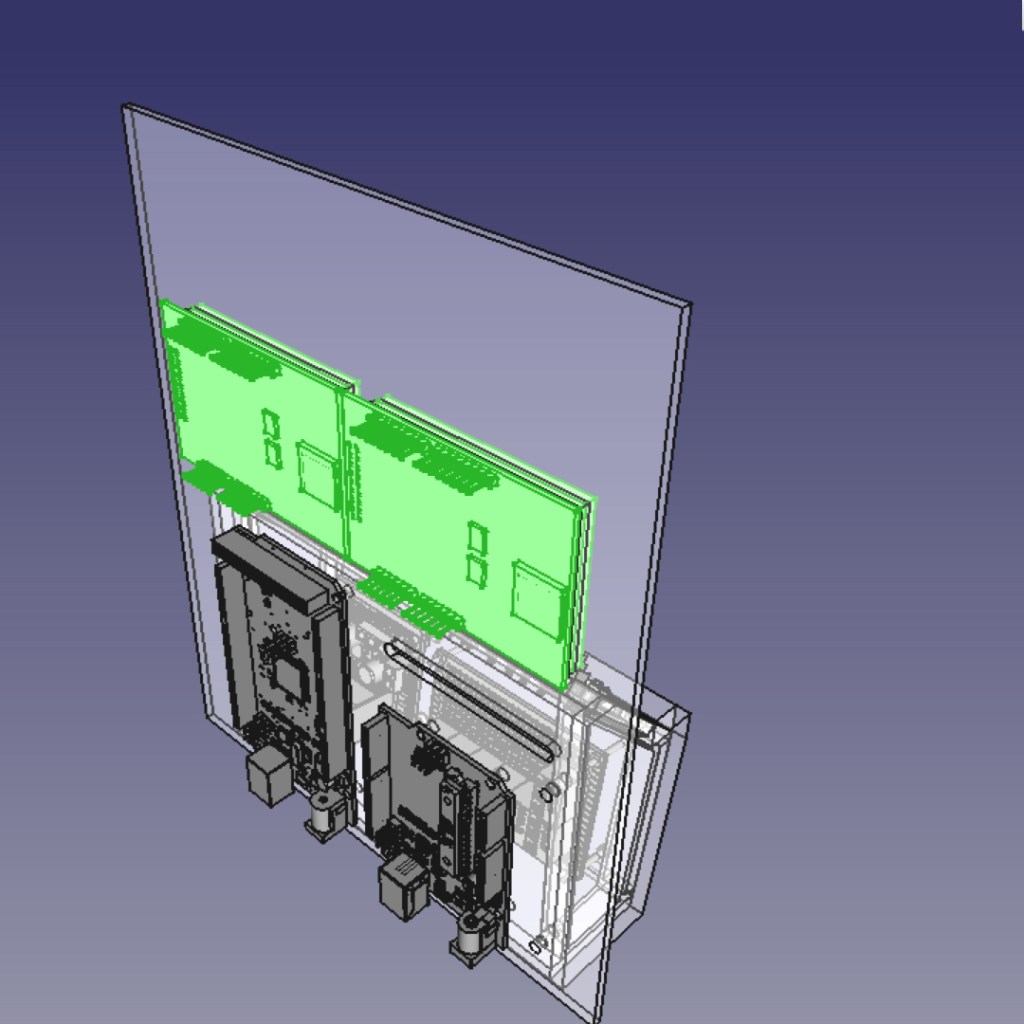
Cartes Arduino
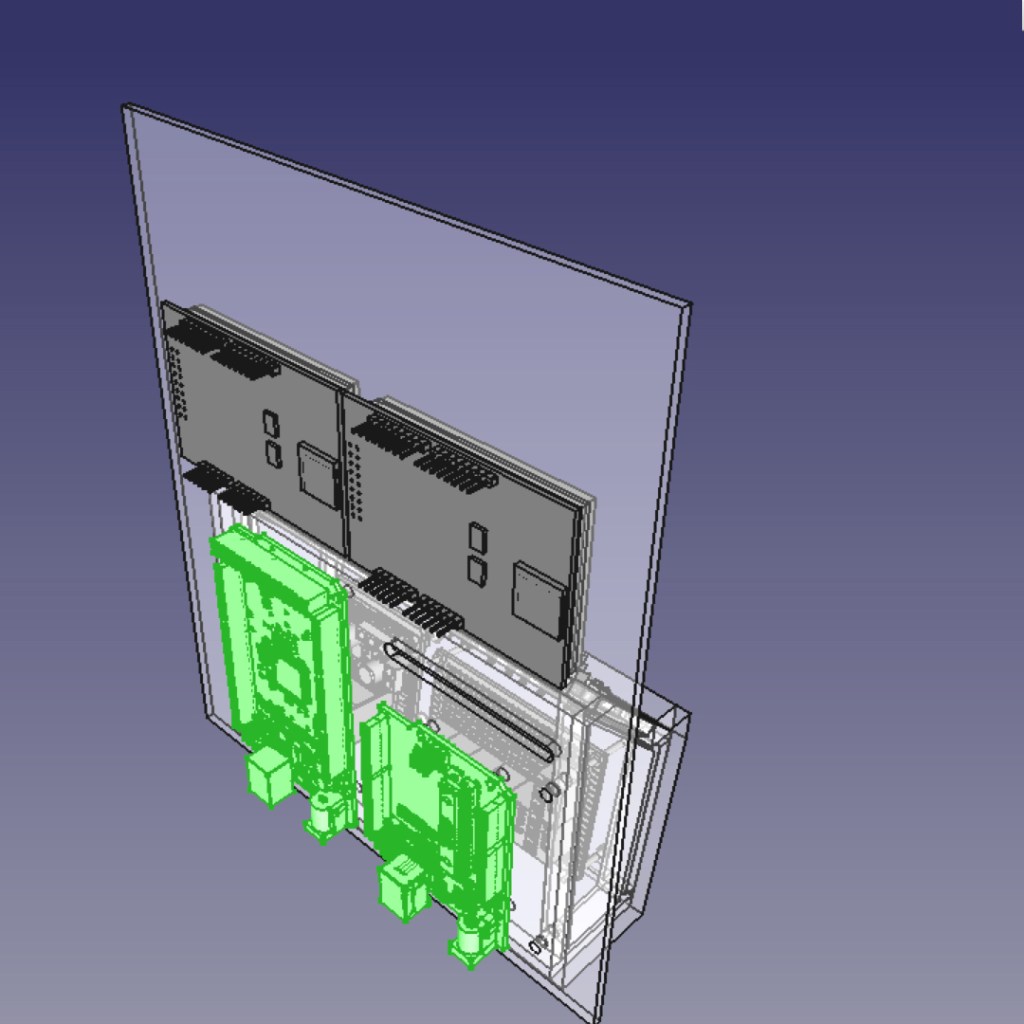


Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
Panneau des commandes



La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
Ecrans de contrôle


Modélisation 3D
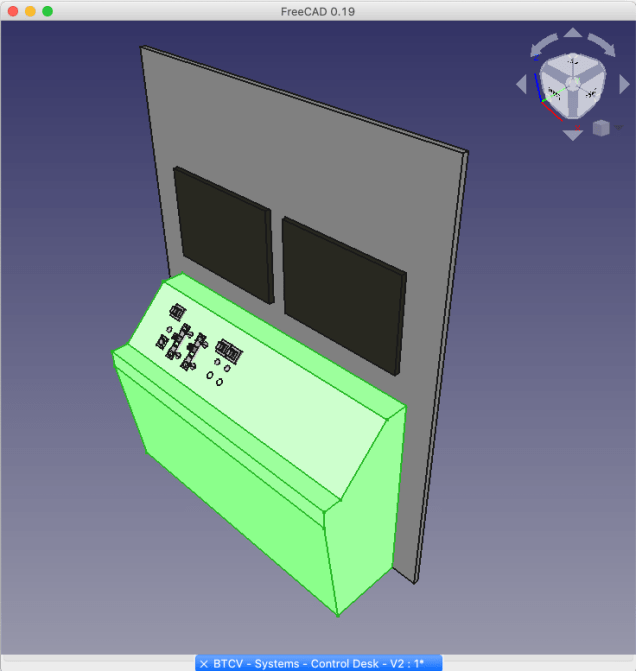
FreeCAD

La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
GrabCAD

Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Modeles 3D



Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.
Voir aussi
Articles – Conception préliminaire



Articles – Console de commande



Console de commande – Electronique – Ep1

Cet article présente la conception électronique du prototype de commande de la console de commandes du diorama de la Batcave du projet BATLab112.
Introduction
La réalisation du diorama technique du projet BATLab112 requiert la mise en œuvre d’une infrastructure de commande fiable, didactique et cohérente avec les fonctions attendues du dispositif final. La console de commande, élément central de l’interface opérateur, constitue à ce titre un module critique. Elle assure l’articulation entre les commandes manuelles, les systèmes d’automatisation futurs et l’ensemble des actionneurs mécaniques, notamment le moteur de la plateforme rotative.
Après validation du concept mécanique de la console et de l’agencement des composants électroniques (écrans, boutons, commutateurs, microcontrôleurs), une première étape de prototypage électronique a été entreprise. L’objectif de cette phase est de vérifier la pertinence des choix techniques, d’évaluer l’ergonomie des modes de commande et de valider les comportements fonctionnels avant passage à une intégration définitive.
Le présent document propose une description détaillée de cette première version électronique, de son architecture générale aux essais menés sur maquette, en adoptant une démarche rigoureuse conforme aux standards de conception en électronique appliquée.
+ d’infos sur la conception préliminaire de la console de commande :
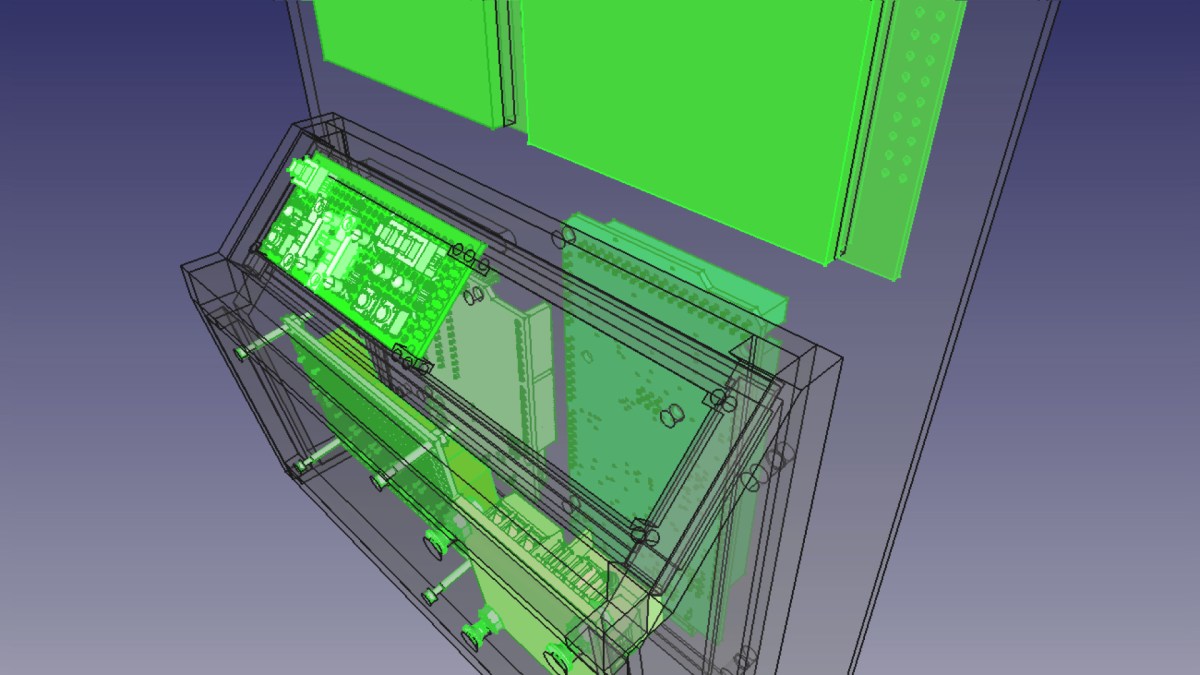
Schéma électronique
Architecture générale du système
La structure électronique de la console de commande repose sur un schéma de principe élaboré à l’aide du logiciel libre KiCad, choisi pour sa flexibilité, sa richesse fonctionnelle et sa compatibilité avec les environnements de prototypage rapide.
L’architecture est organisée en deux sous-systèmes principaux :
- Le module de gestion des commandes manuelles, intégrant les commandes de l’opérateur (boutons, commutateurs, voyants).
- Le module d’interface de puissance, assurant la mise en forme et la distribution des signaux vers le moteur à courant continu responsable de la rotation de la plateforme.
Cette séparation fonctionnelle répond à un impératif de lisibilité du schéma mais également à une logique de modularité favorisant les évolutions ultérieures.
KiCad

Ce schéma électronique est réalisé avec la suite logicielle KiCad distribuée librement.
Sous-système de gestion des commandes
La partie supérieure du schéma se divisent en 5 parties dédiées à la gestion des commandes. La partie inférieure du schéma est dédiée à l’interface entre les commandes et l’alimentation du moteur de rotation de la plateforme.
Mise sous tension – arrêt général
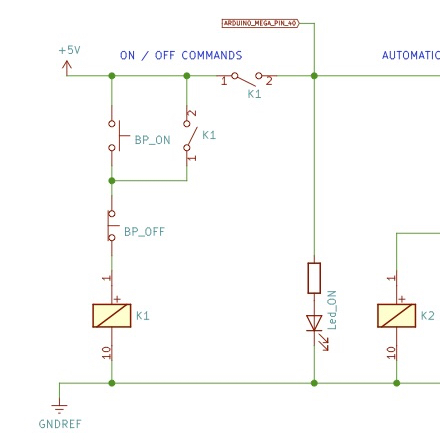
La mise sous tension générale est réalisée au moyen d’un relais à auto-maintien, solution fréquemment adoptée dans les environnements industriels.
Le principe consiste à maintenir l’alimentation du circuit tant que le relais reste excité, l’opérateur pouvant interrompre cette excitation via un bouton poussoir d’arrêt.
Cette architecture garantit la sécurité fonctionnelle du dispositif tout en simplifiant le comportement de remise en service.
Sélection du mode Auto / Manuel
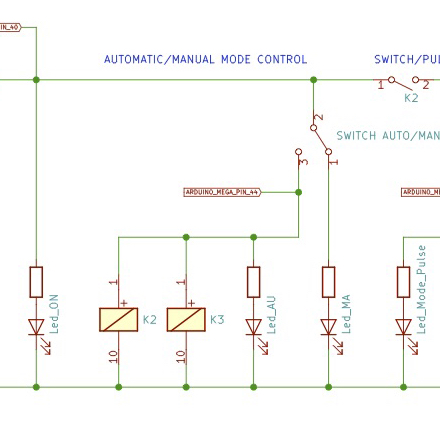
Un commutateur à deux positions permet de choisir entre un mode automatique et un mode manuel. Ce choix conditionne la provenance des signaux de commande :
- En mode manuel, les boutons opérateur commandent directement les relais gérant le sens de rotation.
- En mode automatique, ces mêmes relais sont pilotés par l’unité d’automatisation (qui sera intégrée dans une phase ultérieure du projet).
- BP_ON : Bouton poussoir de commande du relais K1
- K1 : Relais dont un contact est utilisé pour assurer son auto-maintien. Le deuxième contact est utilisé pour mettre sous tension tout le reste du montage.
- BP_OFF : Bouton poussoir de coupure de l’alimentation du relais K1.
- Led_ON : Led dont l’allumage dépend du deuxième contact du relais K1.
- SWITCH AUTO/MAN : Commutateur permettant d’alimenter soit les relais K2, K3 et la Led Led_AU, soit la Led Led_MA seule.
- K2 : Relais dont un des contacts autorise la mise sous tension de la suite du montage.
- K3 : Relais dont les contacts aiguilles vers l’interface de puissance du moteur, les commandes manuelles ou les commandes automatiques.
- Led_AU : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position AUTO.
- Led_MA : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position MAN.
Sélection du mode Switch / Pulse
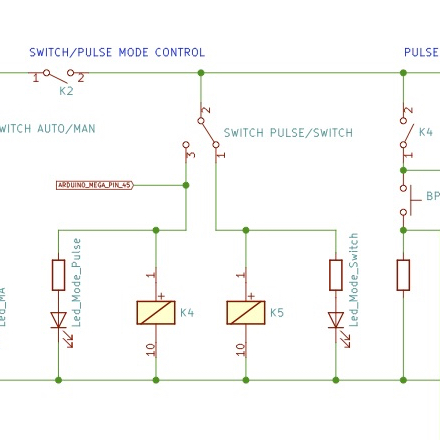
La sélection entre le mode switch et le mode pulse est assurée par un commutateur à 2 positions.
- SWITCH PULSE/SWITCH : Commutateur permettant d’alimenter soit K4 et Led_Pulse, soit K5 et Led_Switch.
- K4 : Relais dont un contact va autoriser les commandes manuelles en mode pulse.
- K5 : Relais dont un contact va autoriser les commandes manuelles en mode switch.
- Led_Pulse : Led dont l’allumage est commandé par le commutateur en position Pulse.
- Led_Switch : Led dont l’allumage est commandé par le commutateur en position Switch.
Switch & Pulse Commands
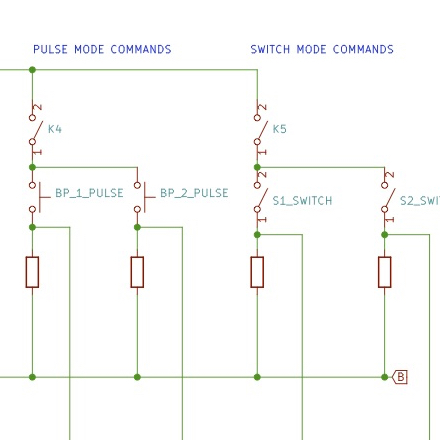
Les commandes manuelles en mode pulse sont assurées par des boutons poussoirs classiques. Il est nécessaire de maintenir l’appui sur le bouton poussoir maintenir la commande.
Les commandes manuelles en mode switch sont assurées par des boutons poussoirs à maintien de position. un premier appui bloque le bouton poussoir en position pour activer la commande. Un second appui, libère la position du bouton poussoir est arrête la commande.
- PB1_PULSE: Bouton poussoir de commande de la rotation du moteur dans un sens.
- PB2_PULSE : Bouton poussoir de commande de la rotation du moteur dans l’autre sens.
- PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans un sens.
- PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans l’autre sens.
Controller commands

Les contacts du relais K3 permettent d’aiguiller vers le moteur, soit les signaux des commandes manuelles soit ceux des commandes automatiques.
LED_R1 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
LED_R2 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
DC Motor controller
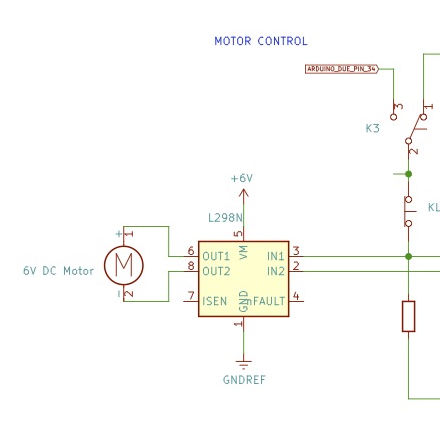
L’interface de puissance qui assure le pilotage du sens de rotation du moteur à partir des signaux de commandes numériques manuelles ou automatiques est une carte électronique basée sur un L298N.
Maquette

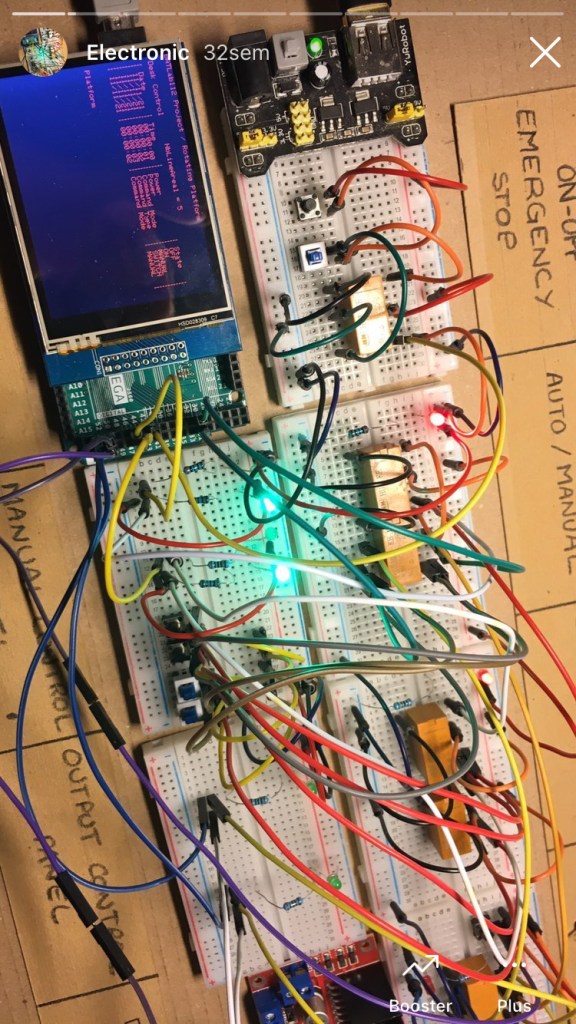

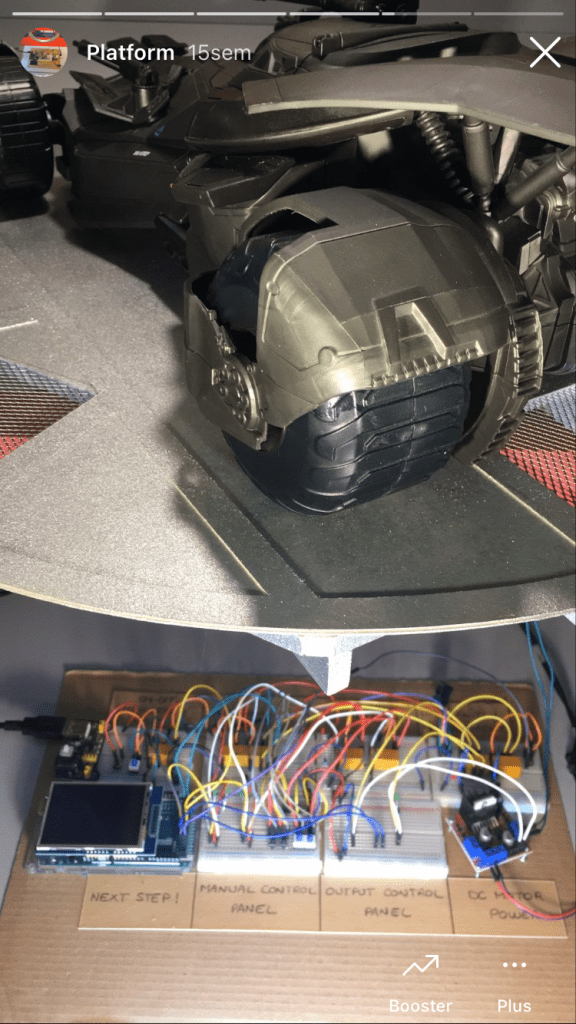
Afin de valider ces choix, une maquette physique du circuit a été réalisée. Le câblage sur plaque expérimentale (protoboard) a permis :
- de vérifier la cohérence des connexions ;
- de confirmer la compatibilité électrique entre les éléments ;
- d’effectuer une série de tests fonctionnels (mise sous tension, bascules de modes, commandes moteurs).
Cette démarche de prototypage intermédiaire est conforme aux bonnes pratiques de l’ingénierie électronique, permettant de déceler d’éventuelles incohérences avant la production d’un circuit imprimé ou l’intégration dans l’environnement mécanique définitif.
Test de fonctionnement



Cartes électroniques


Conclusion
Cette première itération électronique de la console de commande du diorama BATLab112 constitue une étape structurante du projet. Elle permet de valider l’ensemble des fonctions de base : gestion de la mise sous tension, sélection des différents modes de commande, pilotage du moteur de la plateforme rotative et évaluation de l’ergonomie opérateur.
L’architecture modulaire mise en place offre une marge significative pour les développements ultérieurs, notamment :
- l’intégration d’un système de contrôle automatisé basé sur Arduino ou équivalent,
- la mise en place d’un affichage en temps réel via un écran TFT 2,8’’,
- la migration vers un câblage définitif en adéquation avec les contraintes mécaniques du diorama.
En ce sens, ce prototype représente un jalon essentiel dans la transition entre la conception préliminaire et la validation fonctionnelle du dispositif final, illustrant une démarche académique structurée et reproductible.
Voir aussi
Articles – Console de la commande
Articles – Conception des équipements industriels


Articles – Timeline du diorama



Console de commande – Conception préliminaire – Ep1

Résumé :
Cet article présente la conception préliminaire d’une console de commande du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
Introduction
La conception préliminaire de la console de commande fait suite à la phase d’étude préliminaire des systèmes industriels existants.
Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges.
Voir l’article …
Vue générale
Le design retenu pour ce premier prototype, issu de la phase de benchmarking, est constitué de deux sous-ensembles : un pupitre et un panneau vertical.
Vues de détails
Pupitre
Le design du pupitre présente un panneau incliné pour supporter les commandes manuelles et un panneau avant légèrement incliné vers l’intérieur pour une meilleur approche de l’opérateur.
Panneau vertical
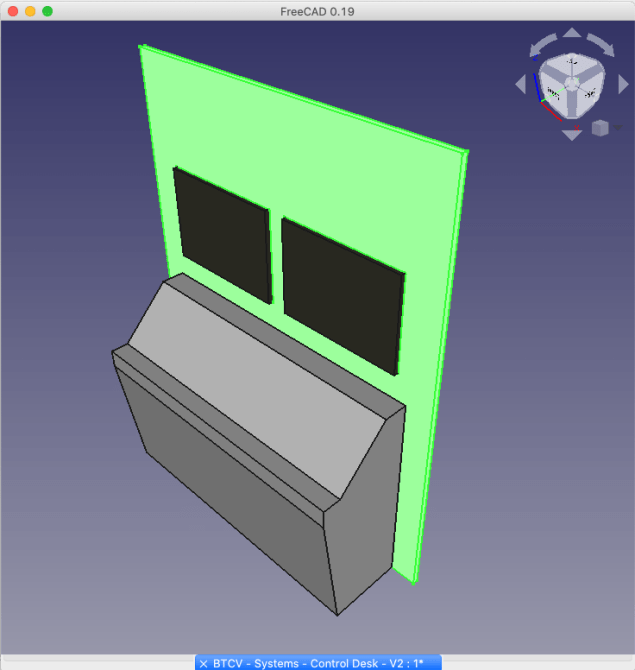
Le design panneau vertical est conçu pour intégrer deux écrans de contrôle et supporter deux cartes Arduino fixées à l’arrière.
Structure du pupitre


Le design des deux pièces latérales (screenshot n°1) donne la forme générale au pupitre selon les critères retenues lors de la phase benchmarking. Compte-tenu de la complexité du design de ces pièces, elles seront réalisées par impression 3D.
Le design du cadre incliné (screenshot n°2) est conçu pour pouvoir fixer 2 PCB au format 20×80 mm, côte à côte. Cette pièce sera aussi réalisée par impression 3D pour des raisons de précisions de réalisation.
Les autres pièces (screenshot n°3) constituant le pupitre, seront réalisées en bois pour assurer la robustesse de l’ensemble et faciliter le travail de percage lors de la fabrication du prototype.
Modélisation 3D
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Modèles 3D




