Cet article de présentation de la structure mécanique du pont roulant bipoutre fait suite à un article de présentation de la conception préliminaire de cet équipement.
Si ce prototype permet de valider le design de la structure du quadrilatère du pont roulant, il reste à présent à définir plus précisément le design des rails de roulement du pont ainsi que le système de festons de câbles électriques.
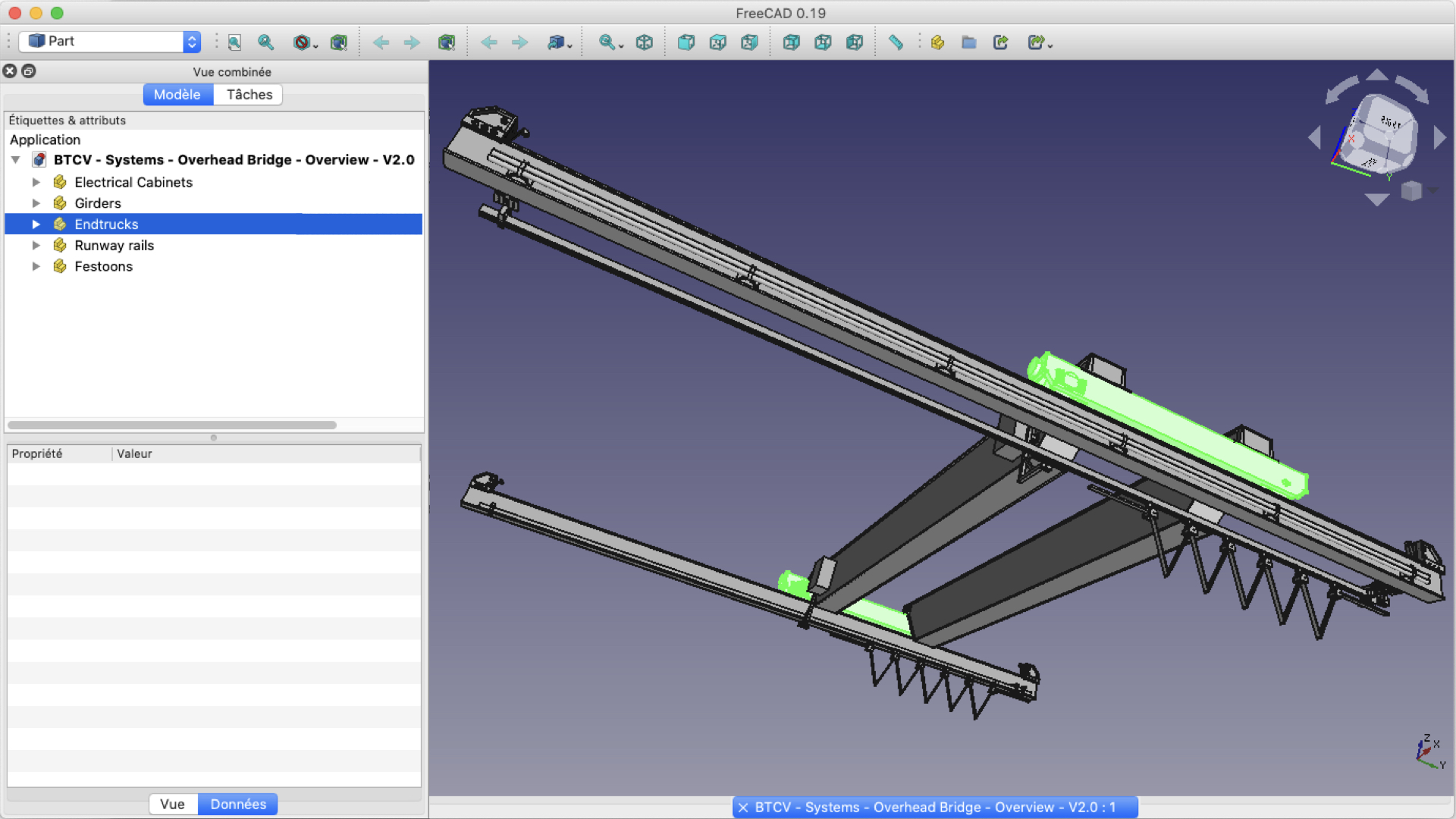
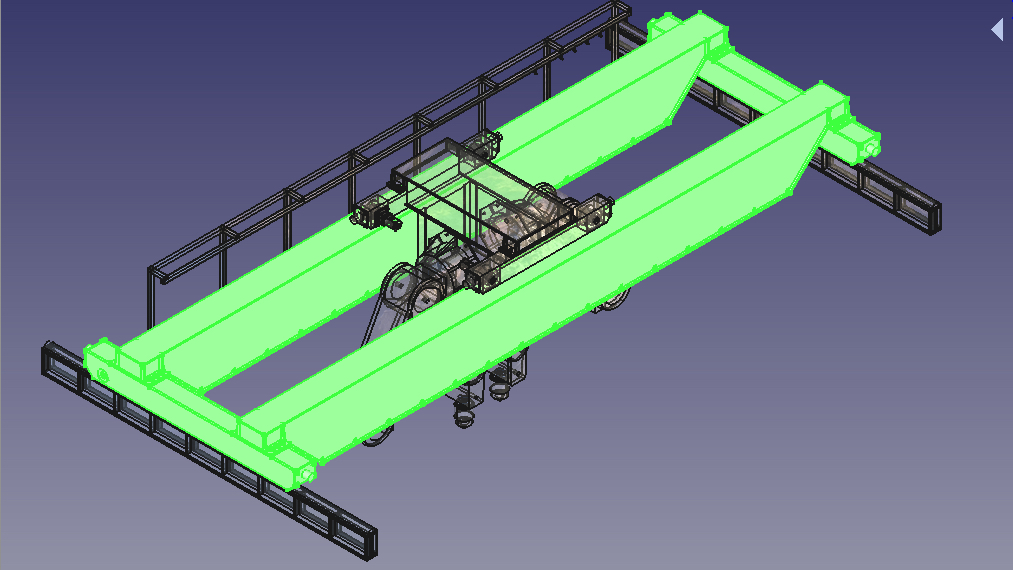
Vue générale du pont roulant
Screenshot n°1 : Armoires de raccordement électrique des moteurs
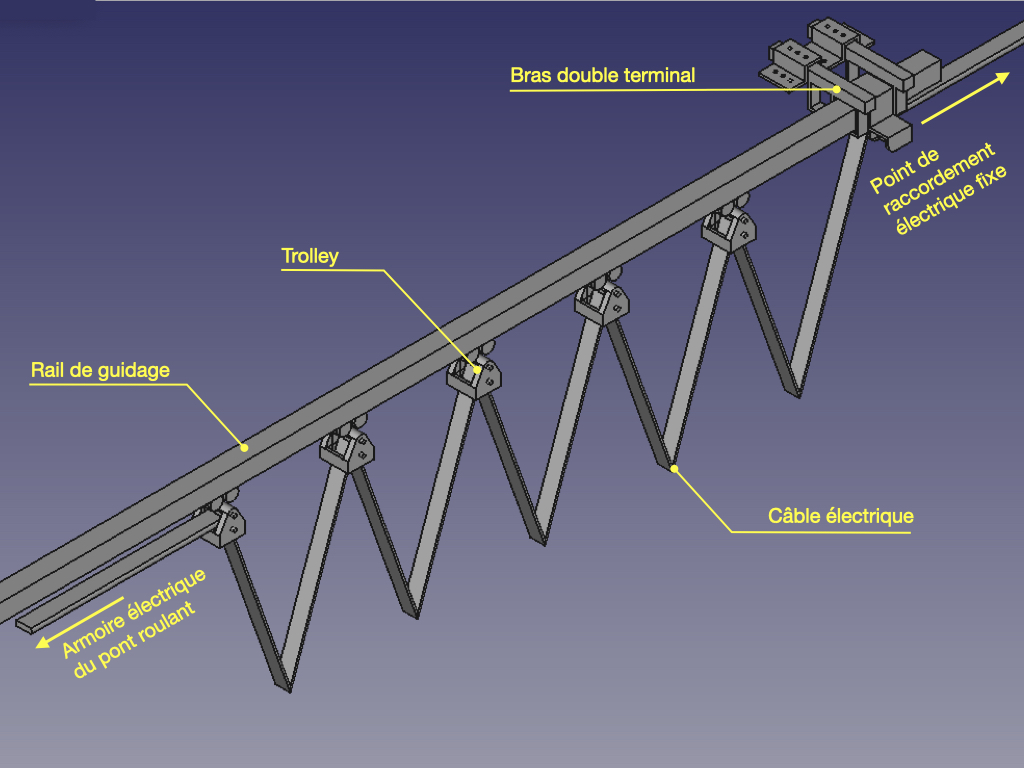
Screenshot n°2 : Festons de câbles électriques
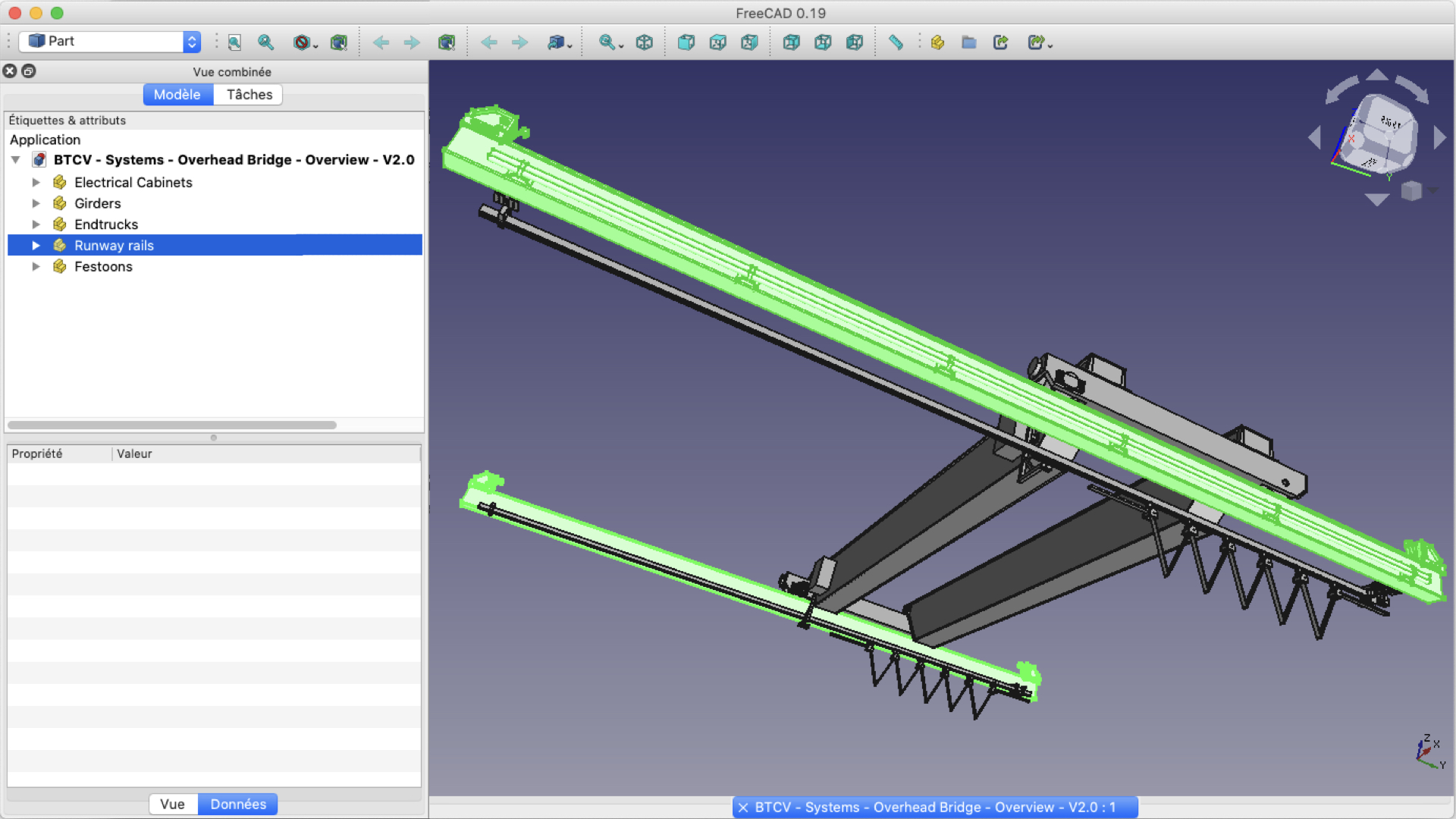
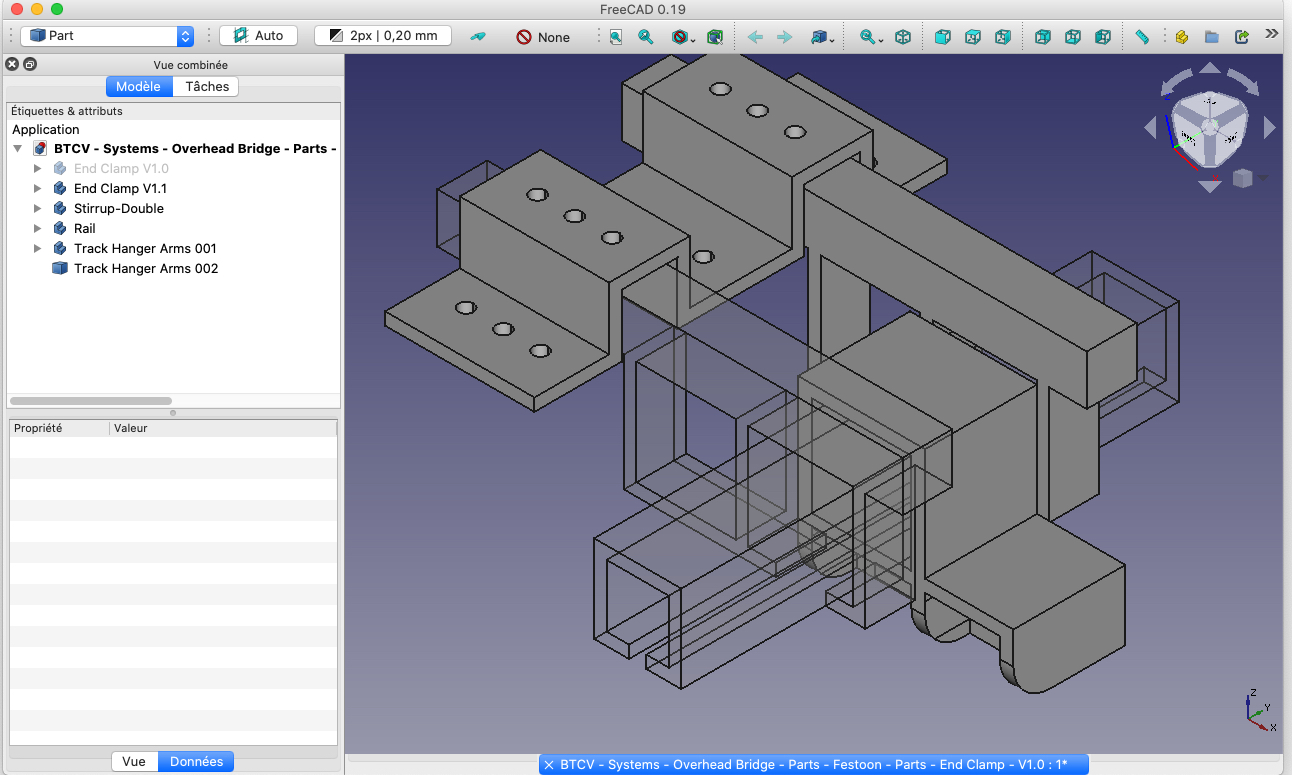
Screenshot n°3 : Rails de guidage et butées de fin course
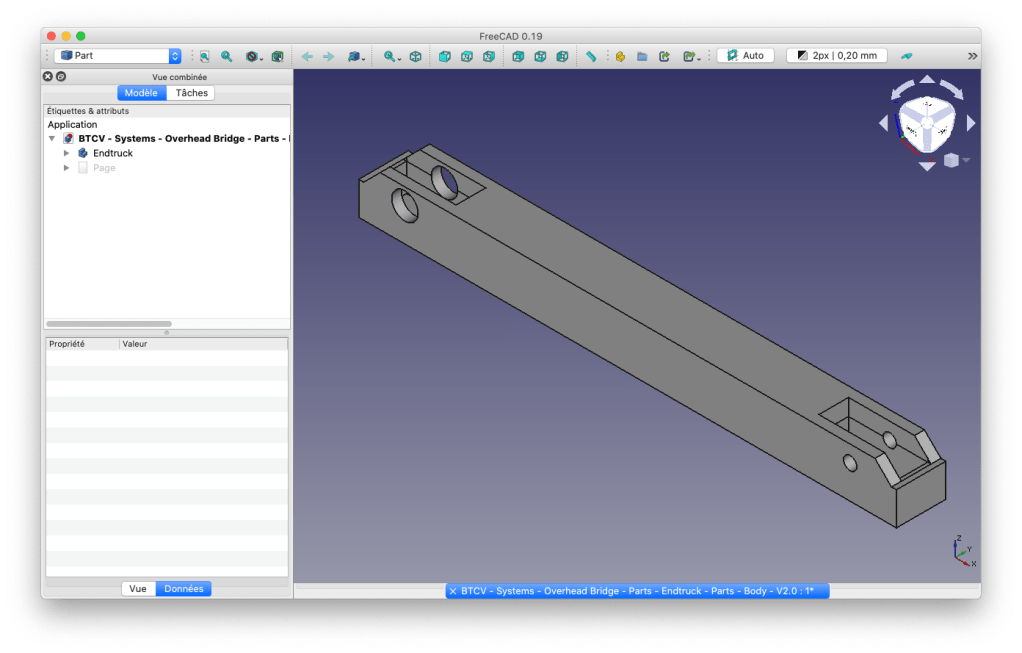
Screenshot n°4 : Sommiers du pont roulant
Screenshot n°5 : Poutres du pont roulant
Festons de câble
Vues générales
Cette vue en perspective axonométrique plongeante montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Cette vue en perspective axonométrique en contre plongée montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Vues de détails
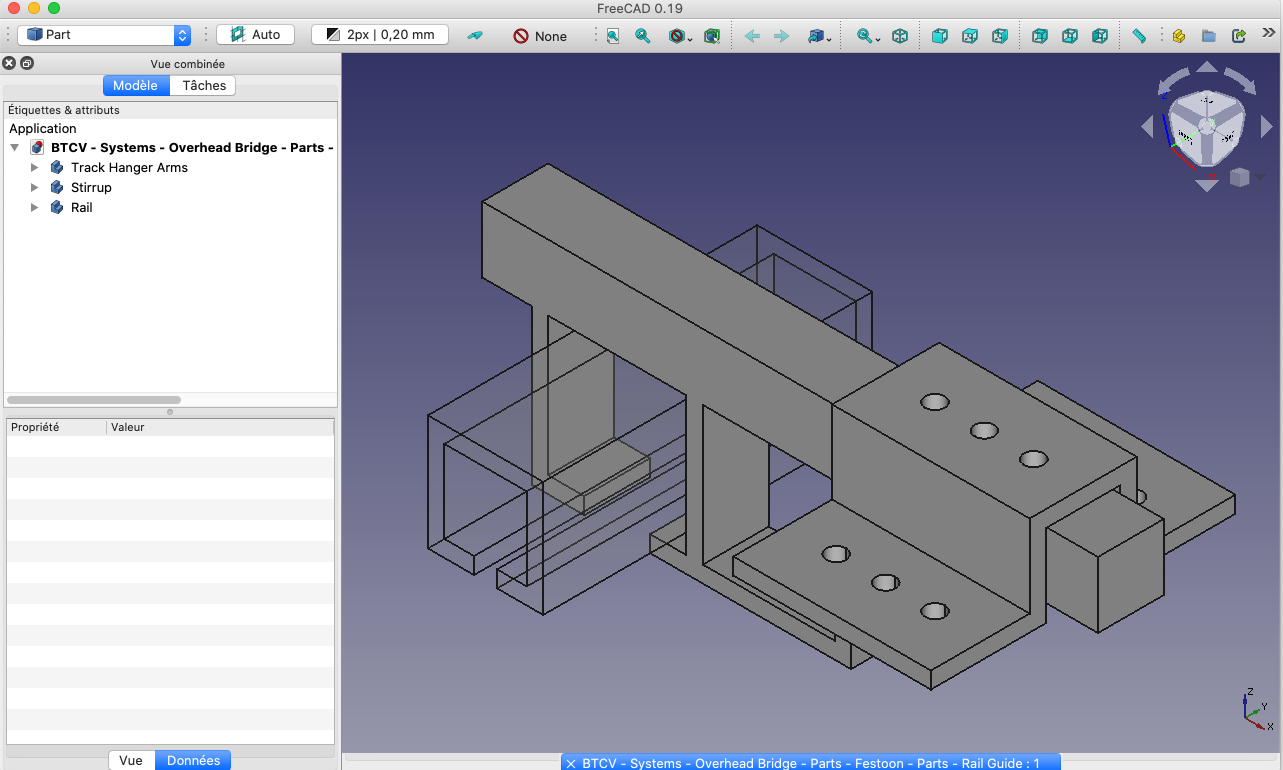
Bras de suspension des rails des festons des câbles
Les rails de guidage des festons de câble sont suspendus par des bras. Ces bras sont composés de deux parties : Le bras de suspension du rail et l’étrier de maintien du bras. Le design de ces deux pièces est conçu pour une réalisation par impression 3D. La fixation des étriers sur la structure du diorama est réalisée par des clous à tête suivant l’implantation des rangées de trou. Le nombre d’ensembles bras et étrier reste à définir en fonction des contraintes lors de la fabrication du modèle opérationnel.
Bras de suspension terminaux des festons de câbles
Pour guider le câble vers son point de raccordement électrique et éviter toute tension due au déplacement du pont, deux bras de suspension du rail de guidage sont fixés par un étrier double. Un guide de câble est alors positionné sur le rail entre les deux bras. En passant dans ce guide, le câble est alors dirigé vers son point de raccordement, tout en étant maintenu en position face à la tension exercée sur le câble lors du déplacement du pont roulant.
Trolleys de roulement des festons
Pour garantir le guidage du câble le long de son rail, des trolleys sont utilisés pour supporter le câble et assurer son guidage grâce à 2 séries de 2 rouleaux enserrant la partie inférieure du rail de guidage. Le design de ces pièces est conçu pour une réalisation par impression 3D.
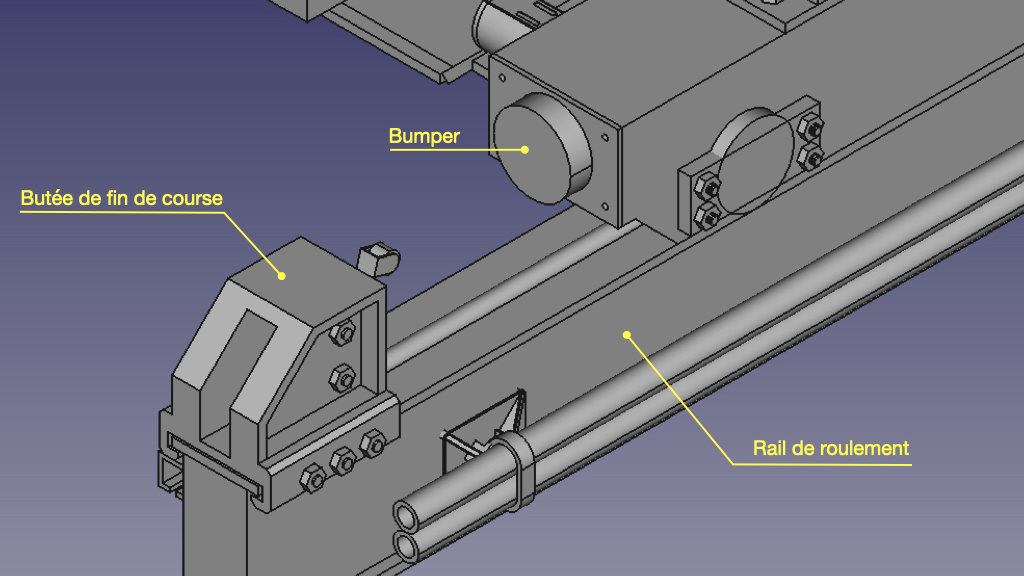
Butées de fin de course
Vues générales
Les butées de fin de course sont placées à l’extrémité des rails de roulement d’un pont roulant. Ces dispositifs constituent une limite physique dans le déplacement du pont roulant, servant de sécurités en empêchant le pont roulant de sortir de ses rails, chuter et faire chuter la charge qu’il transporte.
Les bumpers sont des tampons d’amortissement du choc du contact du pont roulant avec les butées de fin de course. Ils sont installés aux extrémités des deux sommiers du pont roulant (éléments moteur du pont roulant).
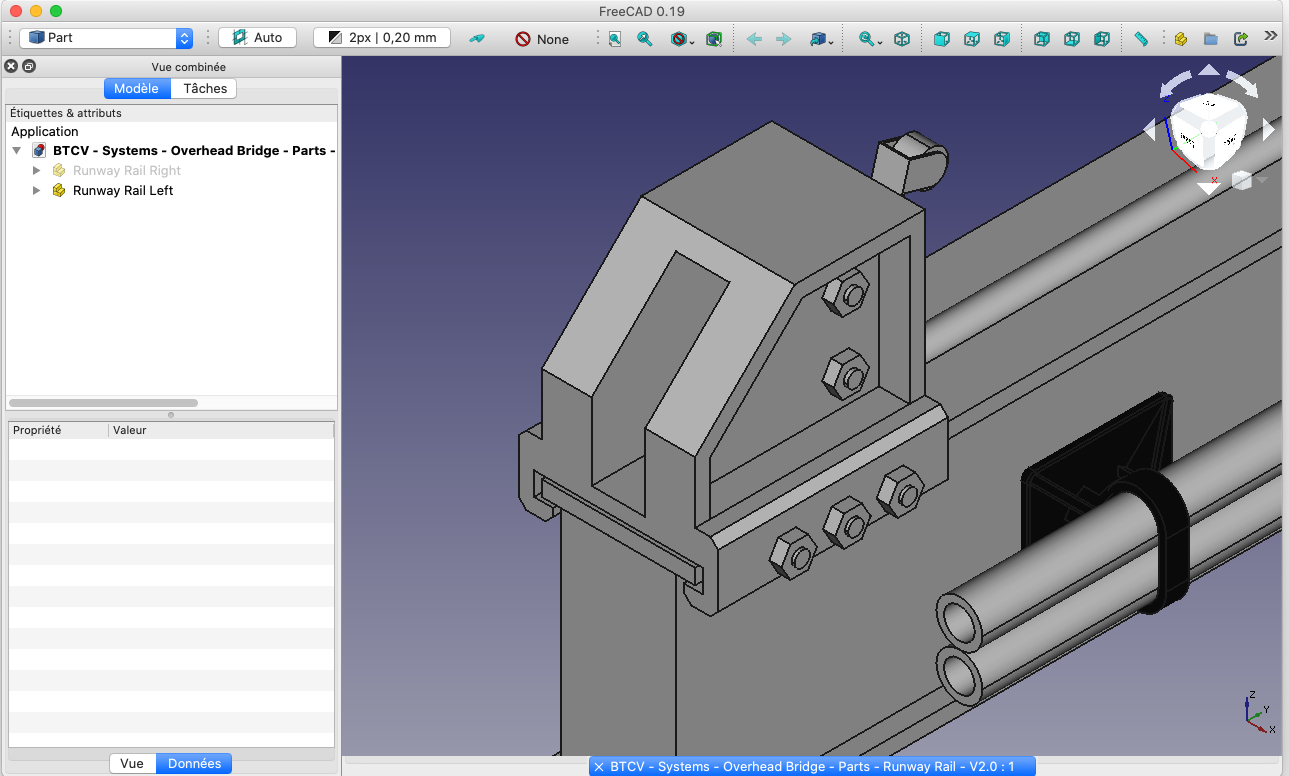
Vues de détails
Chacune des quatre butées de fin de course est équipée d’un capteur coupe circuit. Si le pont roulant vient jusqu’au contact d’une butée, il actionne alors son capteur qui coupe l’alimentation électrique des moteurs, entrainant l’arrêt du pont. Le design du corps de ces butées est conçu pour être réaliser par impression 3D. La fixation des butées sur la rail de roulement du pont est réaliser par 6 boulons M2. Le capteur électrique est inséré dans le corps de la butée, maintenu en position par 2 boulons M2.
Bumpers
Le design des bumpers est conçu pour être réaliser par impression 3D. Ils sont fixés sur les extrémités des sommiers par 2 rangées de 3 clous à tête.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Le design de toutes ces pièces ont été conçus pour être réaliser par impression 3D.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
Cet article présente la réalisation du modèle opérationnel du pont roulant bipoutre du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
Depuis ce précédent article, la structure en bois est restée inchangée, mais des évolutions au design général ont été apportées.
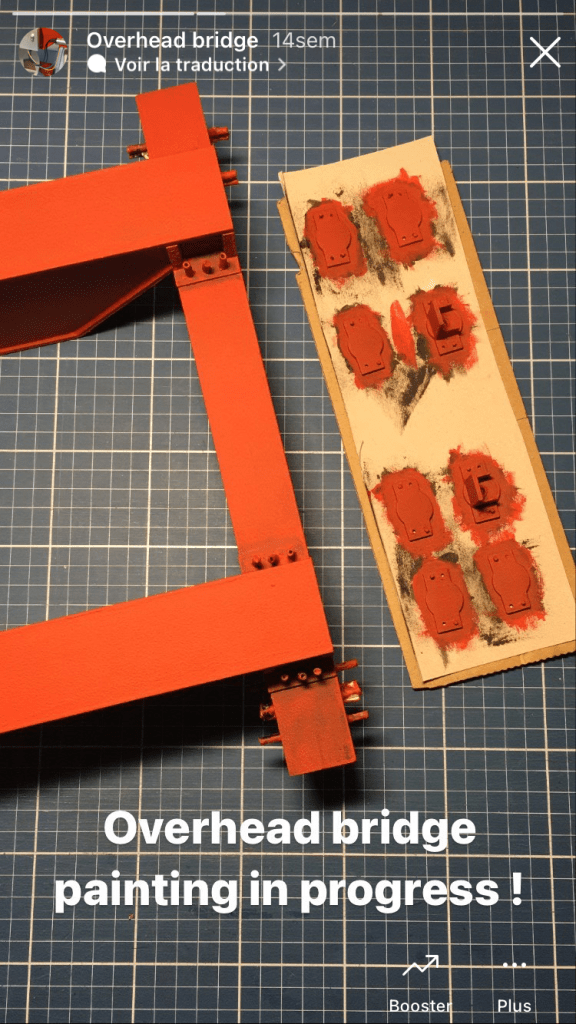
Tout d’abord, le pont roulant bipoutre est peint de couleur rouge « sécurité » (Photo n°1). Ce choix de couleur s’est fait à l’issue de la phase de parangonnage ayant montré que ces équipements industriels sont généralement peints soit en jaune, soit en rouge. Le choix de la couleur rouge est justifié par une approche « esthétique » du diorama.
Ensuite, les armoires de câblages des moteurs sont définitivement fixées sur une des poutres du pont roulant (Photos N°2 & 3). Ces armoires de câblage, autorise un raccordement électrique en toute sécurité, telles que l’on peut les trouver sur des équipements industriels.
La réalisation du prototype du pont roulant bipoutre du diorama de la Batcave fait suite à la conception préliminaire de cet équipement. Voir l’article …
La structure du pont roulant est fabriquée en bois pour des raisons de facilité d’usinage, essentielle lors de cette phase de prototypage, et de maîtrise de l’impact environnementale du projet. Compte tenu des dimensions de certaines pièces constituant cet équipement, il n’était de toute façon pas envisageable de les imprimer avec une imprimante grand public. La perspective d’une fabrication en résine ou par impression professionnelle n’était pas non plus compatible avec le budget prévisionnel du projet.
Les pièces d’assemblage sont imprimées pour des raisons de faisabilité technique et de précision de fabrication. Les principaux sous-ensembles du pont roulant bipoutre sont assemblés par boulonnage (M2).
Les photos utilisées dans cet article ont été prises avant la phase de ponçage et de finition !
Vues de détails
Pièces en bois
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite fabriquées par le 8FABLAB à Crest dans la Drôme.
Pièces d’assemblages
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite imprimées par Benoit, membre de la communauté du projet BATLab112.
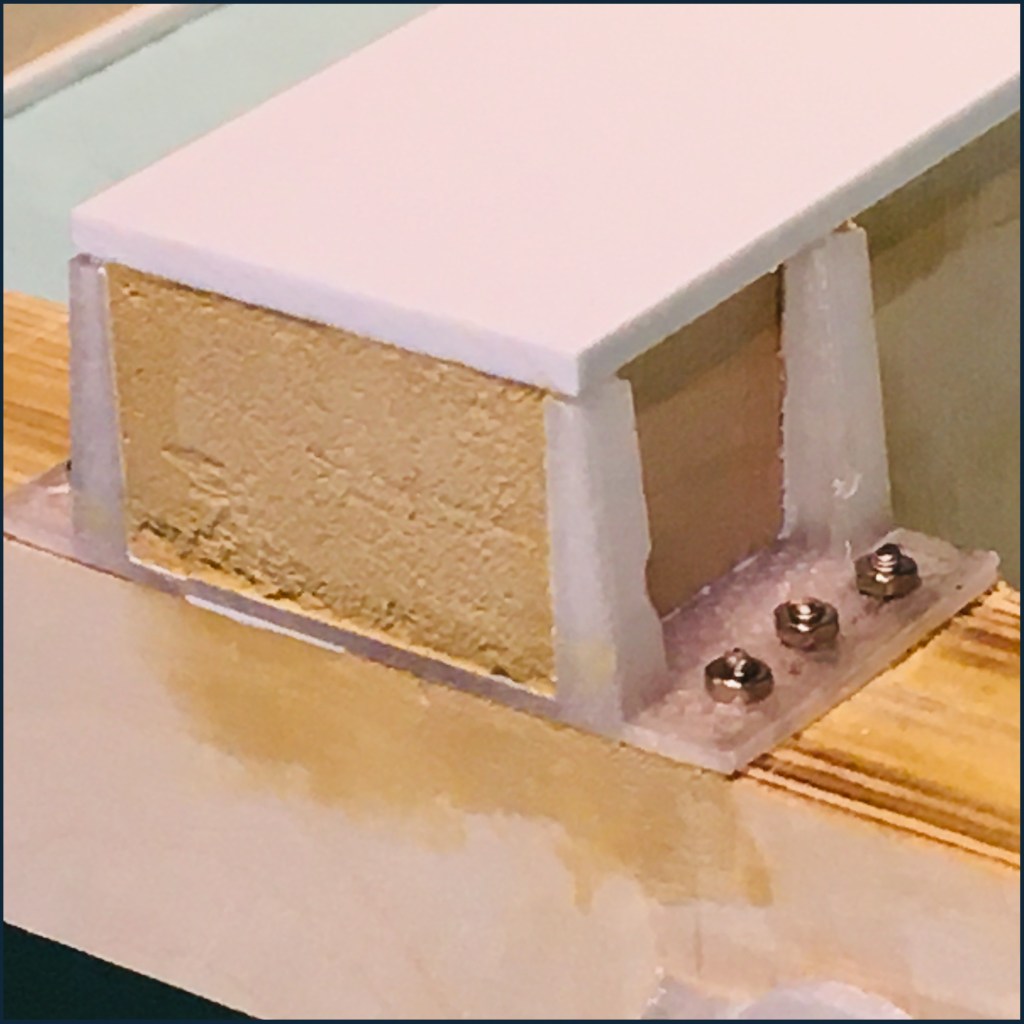
Platine d’assemblage poutre et sommier du pont roulant.
Deux platines d’assemblage sont collées à chaque extrémité des poutres. Ces trois pièces constituent un sous-ensemble. La platine permet le montage et démontage de ce sous-ensemble sur les sommiers du pont roulant par boulonnage.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un montage le plus ajusté possible.
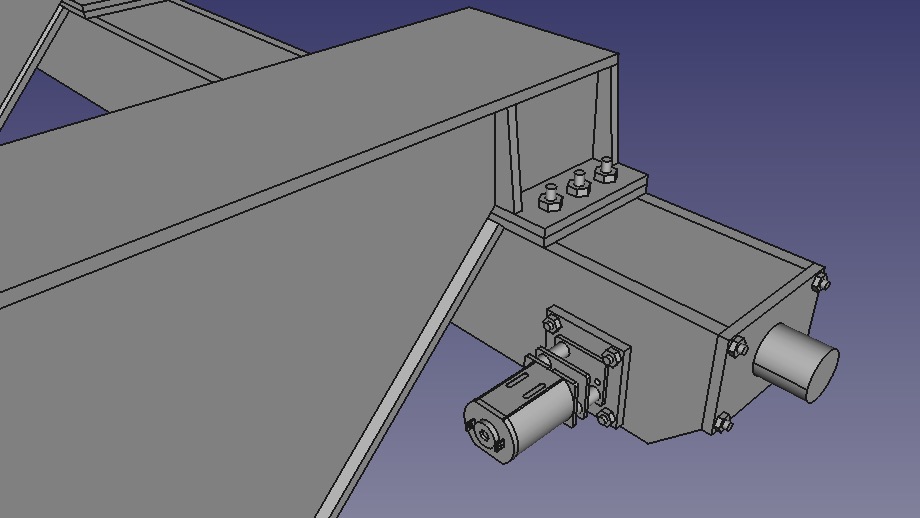
Support de fixation des micros moteurs
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Sa forme permet de maintenir un micro moteur 6VDC. Un système de fixation supplémentaire reste à l’étude pour le moteur.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un maintien du moteur.
Plaque de protection
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Aucune contrainte particulière n’est requise pour la réalisation de cette pièce, destinée à protéger et maintenir en place l’axe de la roue libre.
Test fonctionnel
Cette vidéo a été réalisée en mode expérimentale, à partir d’une structure principale incomplète. Son objectif était de montrer le fonctionnement général du pont roulant bipoutre.
Validation du design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire
Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite aux contraintes d’assemblage rencontrées .
Prototype n°1
La fabrication des pièces principales en bois est satisfaisante même si leur poids reste important. Les différents éléments constituant les poutres du pont roulant ont été assemblés par collage. L’ensemble est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Validation du design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le point fonctionnel critique sur ce prototype est la liaison pivot des axes de rotation des roues. Il est impératifs que ces liaisons soit la plus fluide possible pour autoriser l’utilisation de micro moteur. Le poids non négligeable de la structure en bois étant déjà un handicap il est impératif de contrôler cette fonction.
Prototype n°1
L’essieu d’entrainement est réaliser à partir d’un axe en aluminium, des roulements à billes de guidage et une poulie à gorge en V pour la roue. L’essieu de roue libre est réalisé à partir d’un axe et d’une poulie à gorge en V.
Validation de la résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids des deux bras robotiques ainsi que du Trolley sur lequel ils sont fixés. Cependant, les bras robotiques étant en cours de fabrication ce test n’a pu être réalisé.
Toutefois ce test a mis en évidence la trop grande souplesse de la structure supportant les rails de guidage du pont roulant.
Test de la motorisation du système
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
Le couplage de l’axe des roues motrices avec les moteurs est assuré par un assemblage « en force » entre l’axe du moteur et l’axe de la roue.
La prochaine version de cette transmission devra assurer un couplage entre l’axe du moteur et celui de la roue plus durable.
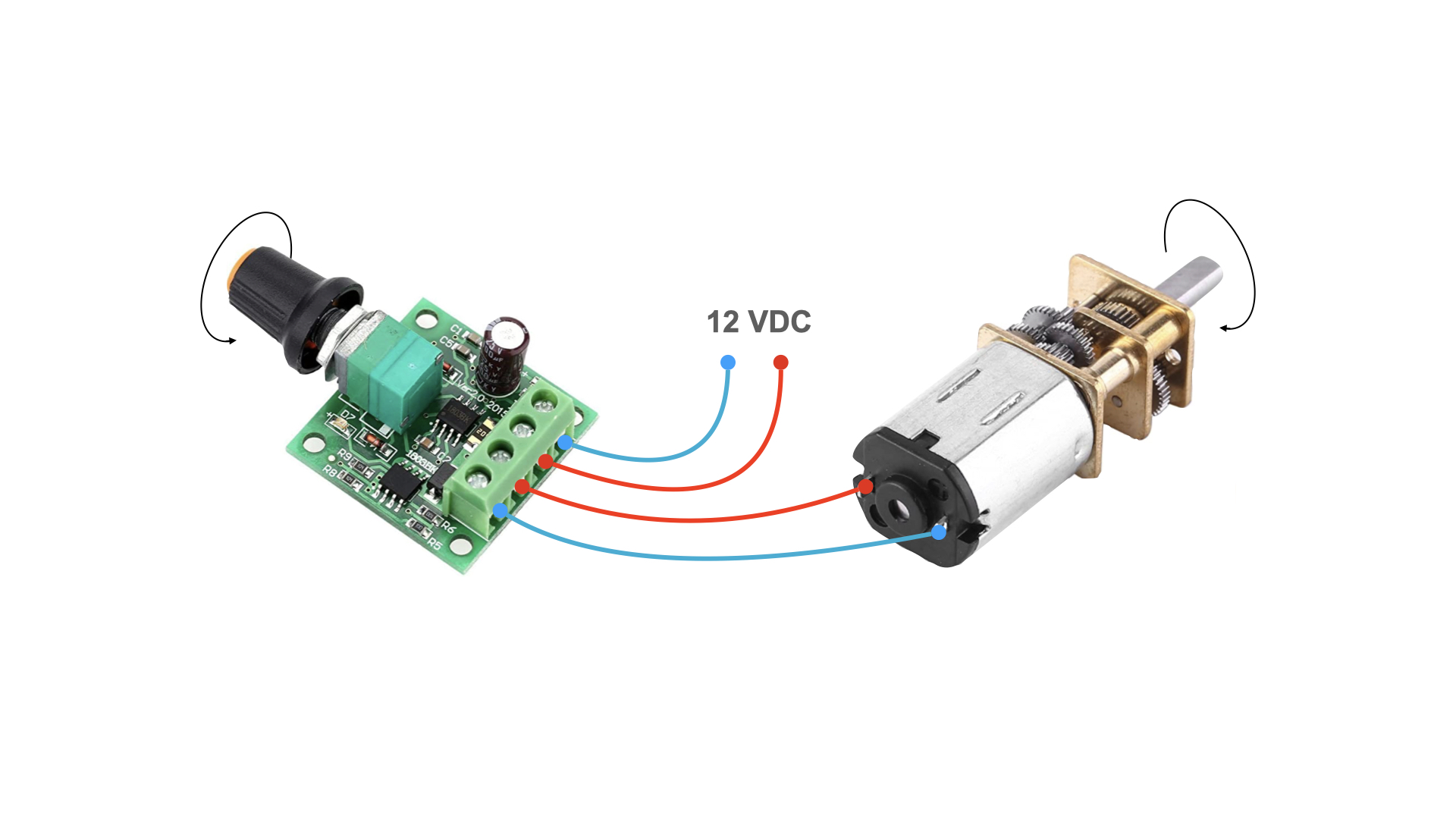
Moteur
Ce test de motorisation a été réalisé avec deux micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler de manière identiques les tensions d’alimentation des moteurs et ainsi ajuster leurs vitesses de rotation à des valeurs identiques. Le couple de ces moteurs est suffisant pour entrainer l’ensemble ; pont roulant + charge. Le test de motorisation est donc validé.
Conclusion
Même si ces premiers tests ont été réalisés dans des conditions non optimales, ce premier prototype du pont roulant bipoutre équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Il est raisonnable de penser que le fonctionnement de cet équipement sera amélioré sur une structure complète et plus aboutie.
Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
La conception préliminaire de la plateforme rotative fait suite à la phase d’étude des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
Dimensionnement
Pour dimensionner le pont roulant bipoutre suspendu, de l’atelier automatique de la Batcave du projet BATLab112, le bras robotique le plus puissant (et le plus lourd) du marché à l’heure où cet article est édité, est pris comme référence. Ces bras robotiques ont une masse totale de 22000 kg. A cela il faut encore ajouter la masse de la charge utile. Si les bras robotiques doivent pouvoir soulever la Batmobile dont la masse du modèle le plus lourd est de 3000 kg, nous obtenons une masse utile de 25000 kg. En prenant en compte un coefficient de sécurité et compte-tenu des « normes » en terme de capacité de levage constatée, le pont roulant bipoutre pris en référence pour le projet BATLab112 aura donc une capacité de levage d’environ 40 tonnes.
Ce premier design du sommier du pont roulant inclut déjà les empreintes des roulements à billes et des axes de rotation des roues. A ce stade de conception préliminaire, la faisabilité technique de fabrication de ce design n’a pas été évaluée.
Le design des poutres du pont roulant inclut les platines de fixation sur les sommiers.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
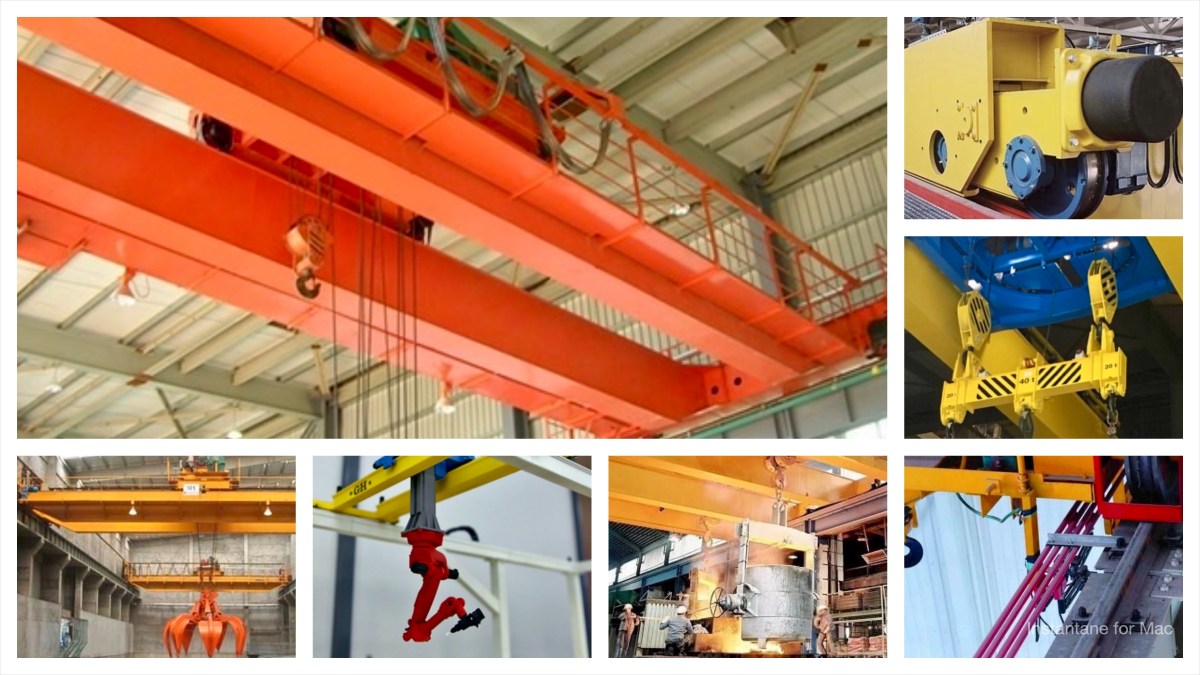
Cet article analyse la phase de parangonnage des ponts roulants industriels existants. L’étude comparative des différentes typologies et configurations permet d’identifier les solutions les plus pertinentes et innovantes. Ces résultats servent de référence et d’inspiration pour la conception du diorama de la Batcave dans le cadre du projet BATLab112, en facilitant le choix des systèmes de levage et des équipements adaptés à une représentation réaliste et fonctionnelle.… Lire la suite →
Le pont roulant constitue un équipement de manutention industrielle destiné au déplacement horizontal et vertical de charges lourdes ou encombrantes au sein d’un espace délimité, généralement un atelier, un entrepôt ou un site de production. Installé en hauteur, il se compose principalement de voies de roulement fixées à la structure du bâtiment, d’un ou plusieurs éléments porteurs, et d’un système de levage mobile. Par sa capacité à assurer des opérations répétitives de manutention avec précision et sécurité, le pont roulant occupe une place centrale dans les secteurs industriels tels que la métallurgie, la logistique lourde, la construction mécanique ou encore l’aéronautique.
Typologies structurelles des ponts roulants
Pont roulant monopoutre
Le pont roulant monopoutre repose sur une unique poutre porteuse, généralement réalisée en acier laminé ou soudé. Le mécanisme de levage, souvent un palan électrique, est suspendu sous la poutre ou déplacé sur un rail intégré. Cette configuration se distingue par sa relative simplicité de conception, son coût d’installation réduit et sa légèreté structurelle. Elle est particulièrement adaptée aux charges modérées et aux portées limitées, ainsi qu’aux environnements où la hauteur disponible sous plafond constitue une contrainte importante.
Toutefois, les capacités de charge et la rigidité globale d’un pont monopoutre demeurent inférieures à celles des configurations plus complexes, ce qui limite son emploi dans les contextes industriels exigeant la manutention de charges très élevées ou une précision extrême.
Pont roulant bipoutre
Le pont roulant bipoutre est caractérisé par la présence de deux poutres parallèles supportant un chariot de levage circulant sur leur partie supérieure. Cette architecture confère à l’ensemble une rigidité accrue et permet l’intégration de mécanismes de levage plus puissants. Elle autorise également une meilleure répartition des charges et une hauteur de levage optimisée, le système pouvant être positionné entre les poutres.
Grâce à ces caractéristiques, le pont roulant bipoutre est privilégié pour les charges lourdes, les grandes portées et les applications industrielles intensives. En contrepartie, son coût d’installation, de maintenance et les exigences structurelles du bâtiment sont généralement plus élevés que pour un pont monopoutre.
Systèmes de levage et dispositifs de préhension
Le système de levage constitue un élément déterminant du pont roulant, tant du point de vue fonctionnel que sécuritaire. Au-delà du mécanisme de montée et de descente proprement dit, divers dispositifs de préhension peuvent être intégrés afin de s’adapter à la nature des charges manipulées.
Levage par aimant
Les dispositifs de levage magnétique reposent sur l’utilisation d’aimants permanents ou électromagnétiques. Ils sont principalement employés dans l’industrie métallurgique pour la manutention de pièces ferromagnétiques telles que des tôles, des profilés ou des blocs d’acier. Ce système présente l’avantage d’un accrochage rapide et sans contact mécanique, réduisant ainsi les temps de manutention. Néanmoins, son usage demeure limité aux matériaux compatibles et requiert des dispositifs de sécurité renforcés en cas de coupure d’alimentation pour les aimants électromagnétiques.
Levage par pince
Les pinces de levage fonctionnent par serrage mécanique ou hydraulique de la charge. Elles sont adaptées à une grande diversité de formes et de matériaux, notamment les charges non ferromagnétiques ou présentant des géométries spécifiques. Les pinces peuvent être conçues pour exercer une pression contrôlée, minimisant ainsi les risques de déformation ou de glissement de la charge. Leur mise en œuvre requiert toutefois un réglage précis et une adaptation rigoureuse aux caractéristiques de l’objet manipulé.
Levage par bras robotisé
Dans les installations les plus avancées, le pont roulant peut être équipé d’un bras robotisé intégré au système de levage. Ce dispositif permet d’associer la capacité de manutention lourde du pont roulant à la précision et à la flexibilité de la robotique industrielle. Les bras robotisés sont utilisés pour des opérations complexes telles que l’assemblage, le positionnement de précision ou la manipulation de pièces délicates. Leur intégration implique cependant une automatisation poussée, des systèmes de contrôle sophistiqués et une analyse approfondie des risques.
Des détails
Les « End beams » et « Bumpers » dans un pont roulant : fonctions structurelles et dispositifs de sécurité
Dans un pont roulant, les End beams (poutres de tête) et les Bumpers (dispositifs d’amortissement de fin de course) jouent un rôle déterminant tant sur le plan structurel que sécuritaire. Les end beams constituent les éléments transversaux situés aux extrémités du pont roulant ; elles assurent la liaison entre les poutres principales et supportent les organes de roulement, permettant ainsi le déplacement de l’ensemble du pont sur les chemins de roulement. Elles contribuent directement à la stabilité, à la répartition des charges et à la précision des déplacements longitudinaux de l’équipement.
Les bumpers, quant à eux, sont des dispositifs de sécurité installés aux extrémités des courses du pont roulant ou du chariot. Leur fonction principale est d’absorber l’énergie cinétique en cas d’atteinte des limites de déplacement, notamment lors d’un arrêt d’urgence ou d’une défaillance de commande. Leur fonctionnement repose sur des systèmes amortissants — mécaniques, élastomères ou hydrauliques — qui réduisent les chocs, limitent les efforts transmis à la structure et participent à la protection des équipements ainsi qu’à la sécurité globale de l’installation.
Le feston dans un pont roulant : rôle fonctionnel et principe de fonctionnement
Dans un pont roulant, le feston constitue un dispositif essentiel destiné à l’alimentation et à la gestion des liaisons mobiles, notamment les câbles électriques, les conduites pneumatiques ou les réseaux de données. Son rôle principal est d’assurer l’acheminement continu de l’énergie et des informations vers les organes mobiles du pont roulant — en particulier le chariot et le palan — tout en accompagnant leurs déplacements longitudinaux ou transversaux.
Le fonctionnement du feston repose sur un système de câbles ou de tuyaux suspendus à des chariots ou galets se déplaçant le long d’un rail dédié. Cette configuration permet une mise en mouvement contrôlée et régulière des liaisons, limitant les contraintes mécaniques telles que la traction excessive, les torsions ou l’usure prématurée. Le feston garantit ainsi la fiabilité des transmissions, la sécurité de fonctionnement de l’installation et la durabilité des équipements, tout en s’adaptant aux amplitudes et aux cycles de déplacement caractéristiques du pont roulant.
Le trolley (chariot de translation) dans un pont roulant : rôle fonctionnel et principe de fonctionnement
Dans un pont roulant, le trolley, également désigné sous le terme de chariot de translation, constitue l’organe mobile assurant le déplacement transversal du dispositif de levage le long des poutres principales. Il supporte généralement le palan ou le treuil ainsi que les mécanismes associés, permettant ainsi de positionner avec précision la charge sur l’axe transversal de l’installation.
Le fonctionnement du trolley repose sur un ensemble de roues motorisées ou guidées se déplaçant sur les ailes inférieures des poutres du pont roulant. Son mouvement est assuré par un système d’entraînement électrique, complété par des dispositifs de guidage et de freinage garantissant la stabilité, la sécurité et la précision des déplacements. Le trolley joue un rôle central dans la cinématique globale du pont roulant, en combinant mobilité, maîtrise de la charge et continuité opérationnelle, tout en contribuant à l’efficacité et à la polyvalence des opérations de manutention.
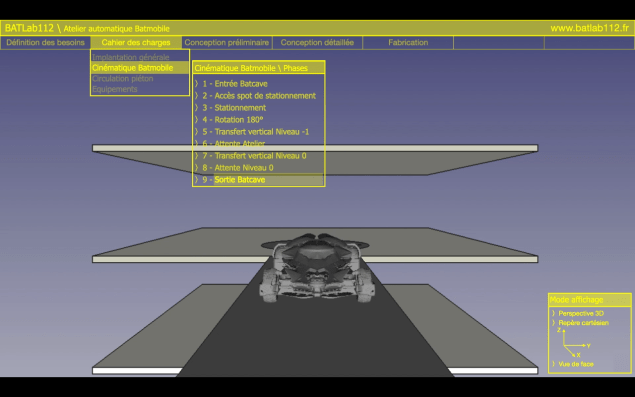
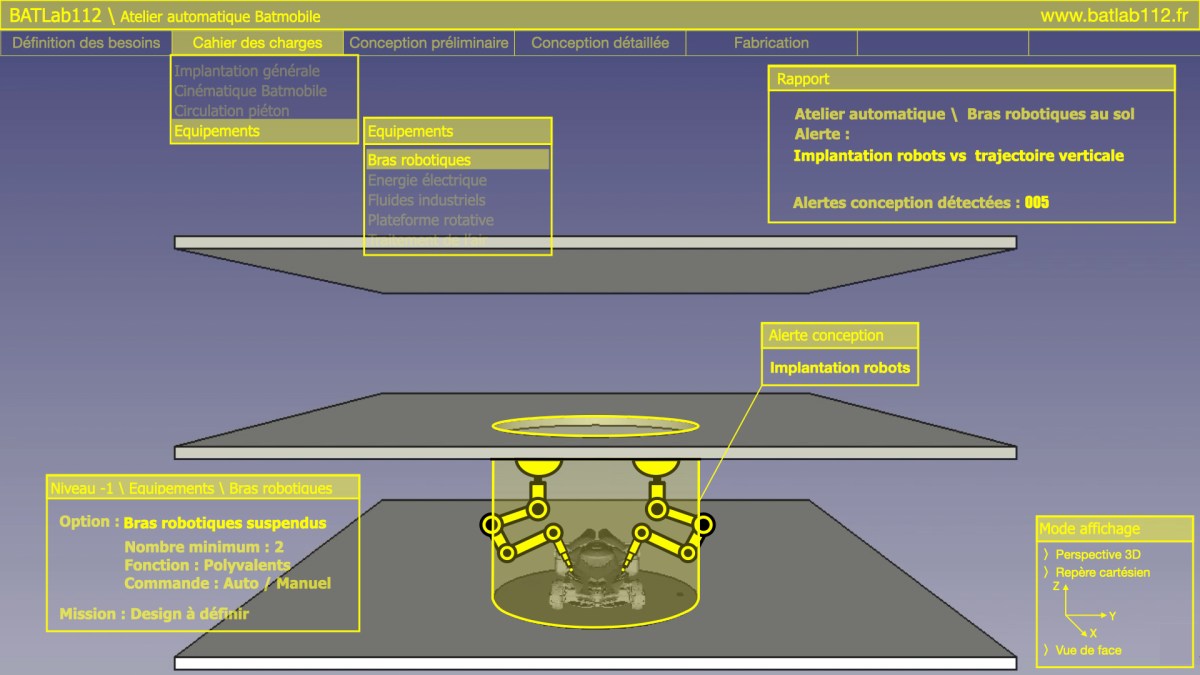
Pont roulant bipoutre et bras robotique : optimisation de l’espace
Cet exemple illustre un système reposant sur l’intégration d’un bras robotique monté sur un pont roulant de type bipoutre. Une telle configuration présente un intérêt particulier dans la perspective de son intégration au sein du diorama du projet BATLab112. En effet, elle permet le déplacement d’un ou de plusieurs bras robotiques au-dessus de la Batmobile, offrant ainsi une couverture fonctionnelle étendue de l’ensemble du véhicule. Cette approche contribue à réduire le nombre de bras robotiques nécessaires pour les opérations d’intervention, tout en s’affranchissant des contraintes liées à l’occupation de l’espace au sol, lesquelles constituent un enjeu majeur en matière d’optimisation spatiale et de lisibilité scénographique.
Voir la suite des articles sur l’étape de parangonnage de la gestion du projet BATLab112