
Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
Présentation générale
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.

Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
Cartes électroniques de puissance

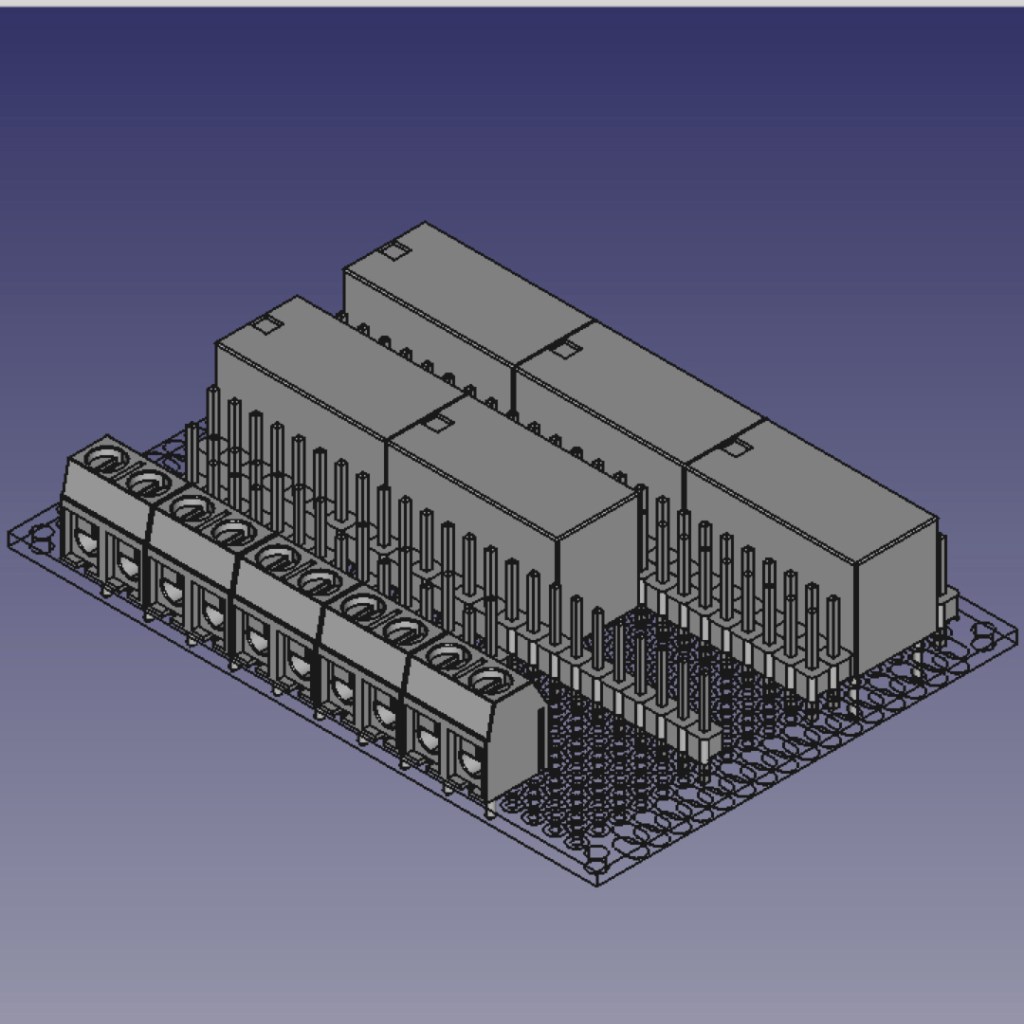

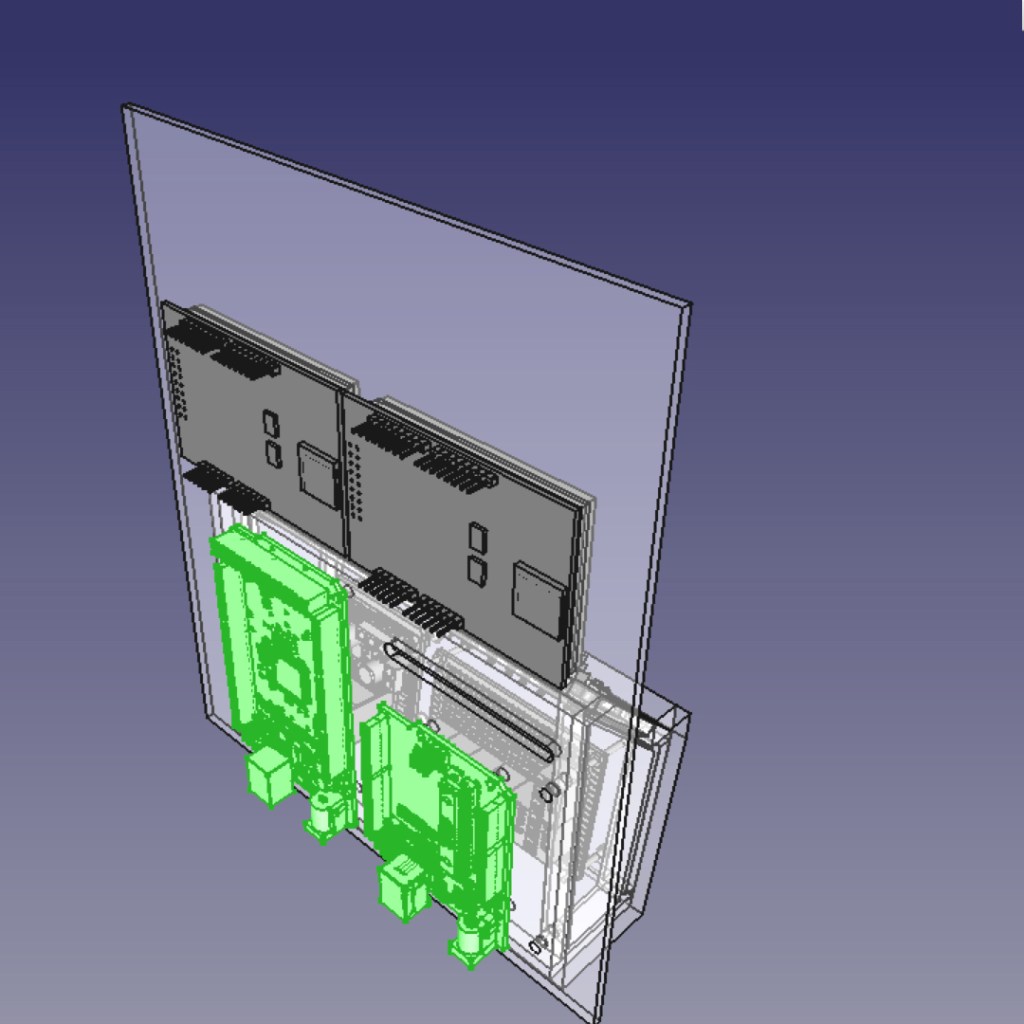
Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
Cartes Arduino


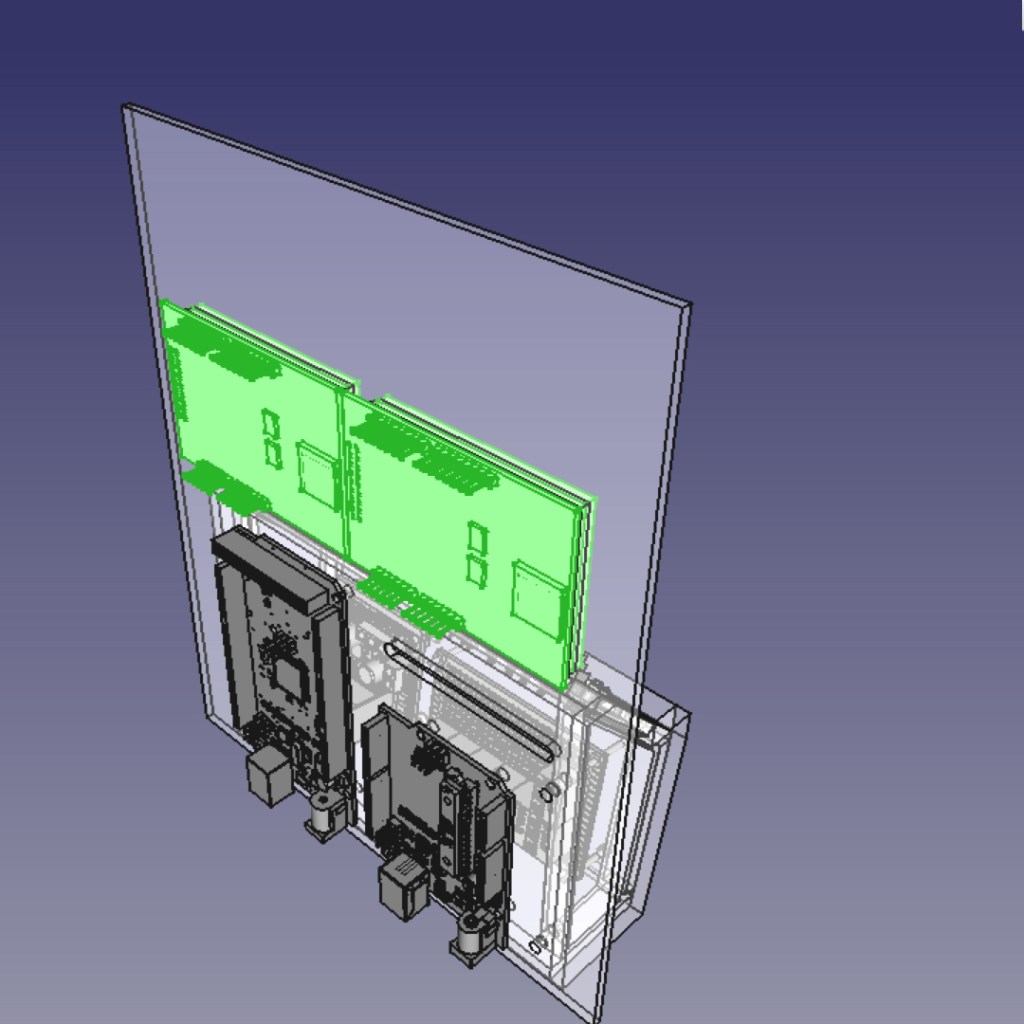
Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
Panneau des commandes



La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
Ecrans de contrôle


Modélisation 3D
FreeCAD

La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
GrabCAD

Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Modeles 3D



Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.







{kind=link}