La conception préliminaire de la structure du diorama de la Batcave fait suite à la modélisation de l’intégration des systèmes industriels présents dans le diorama. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
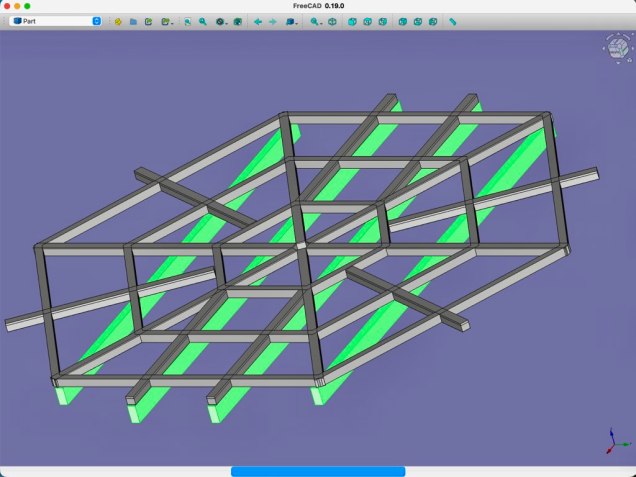
FreeCAD – Batcave Diorama – Main structure – Screenshot 001
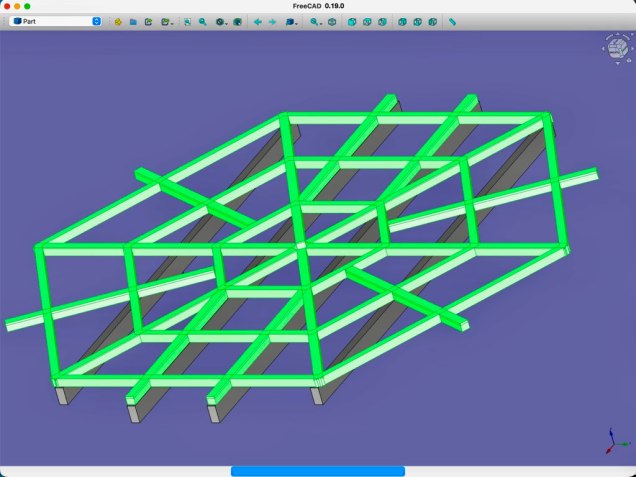
FreeCAD – Batcave Diorama – Main structure – Screenshot 002
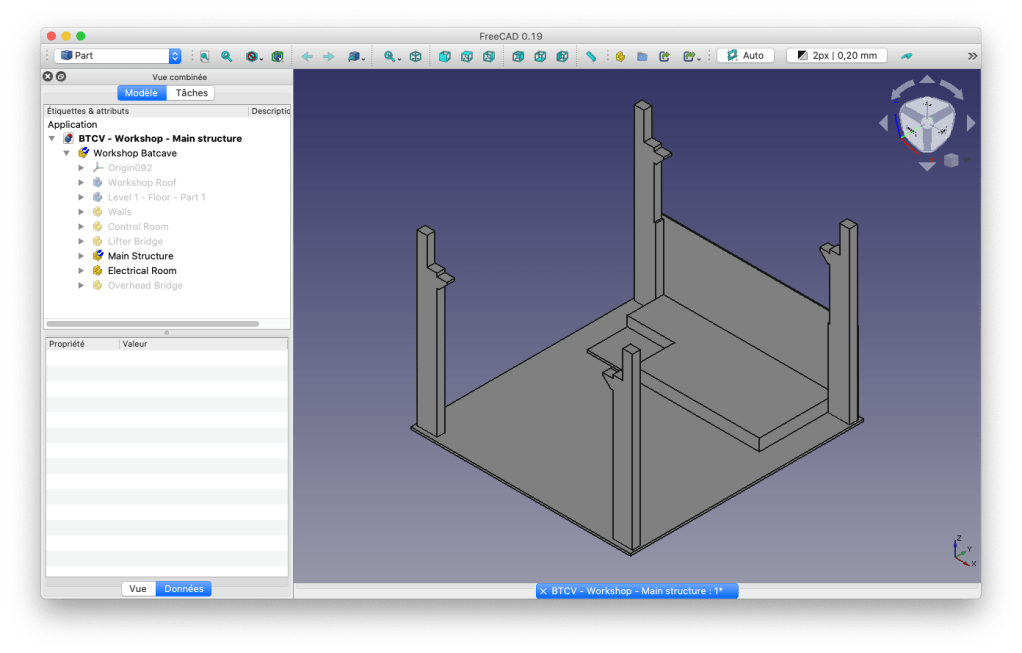
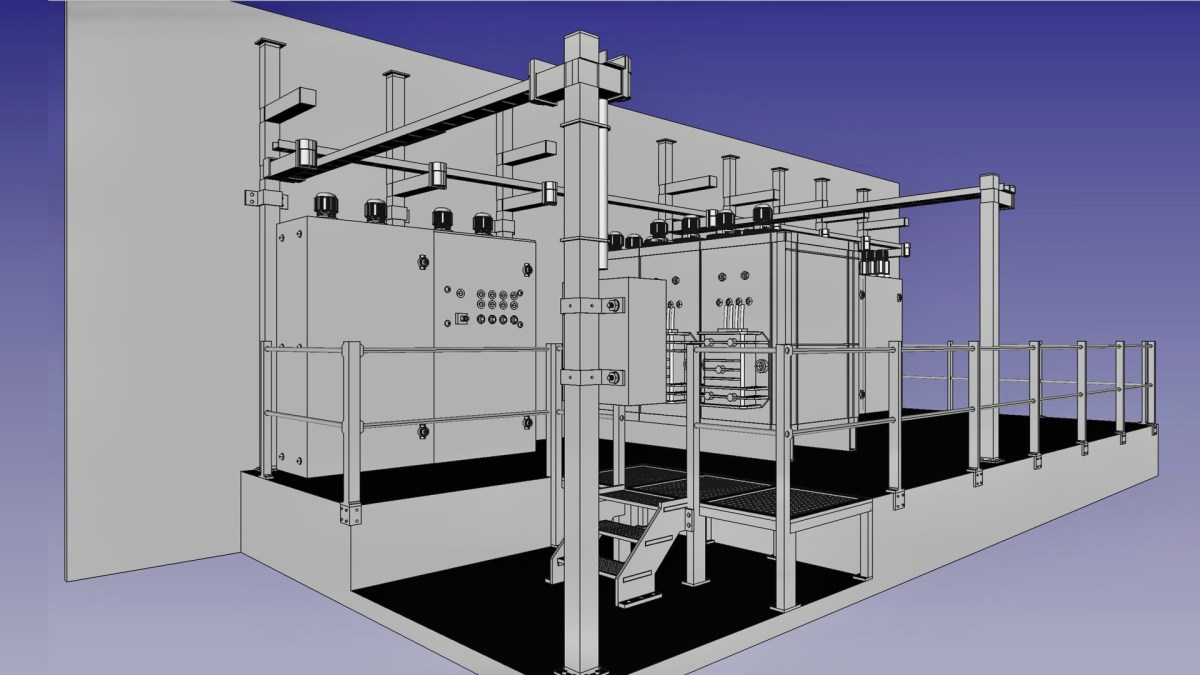
Screenshot 001 – La structure principale est composée d’un plateau sur lequel viennent se fixer les quatre piliers principaux à chaque angle. Ce plateau correspond au niveau 0, celui le plus bas du diorama. Le design des piliers est conçu pour soutenir le plateau du niveau 0, correspondant au niveau d’entrée de la Batmobile dans la Batcave, les chemins de roulements du pont roulant bipoutre, ainsi que le plateau de niveau 0.
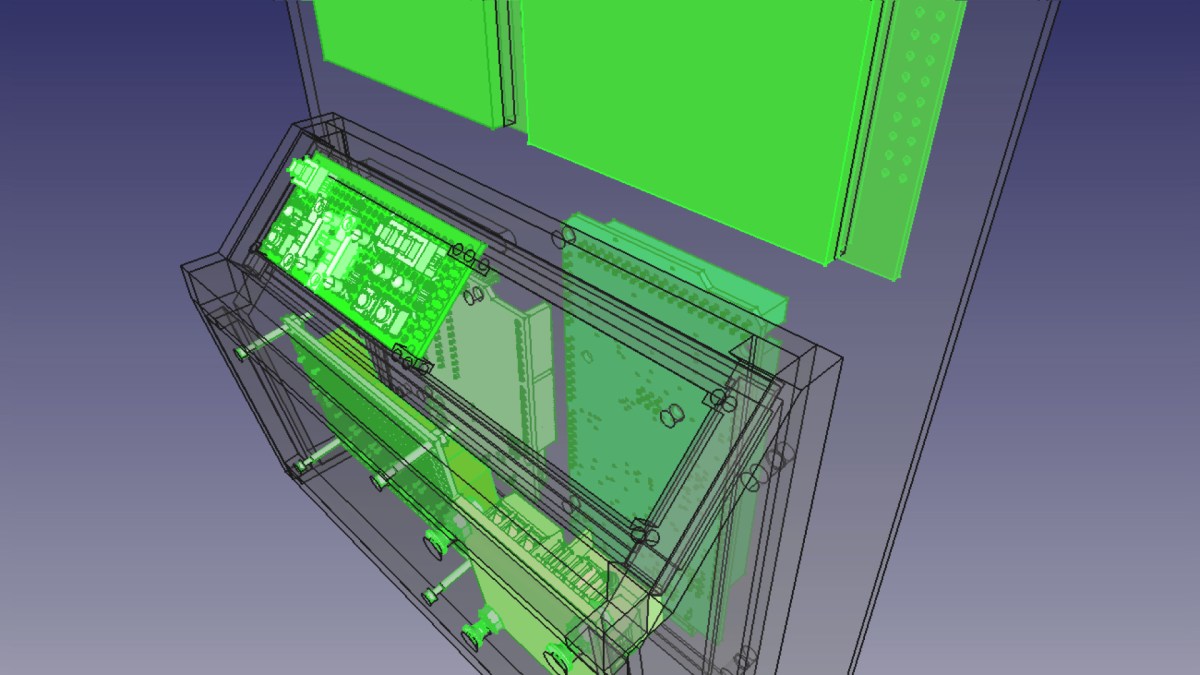
Screenshot 002 – Le module du local électrique se glisse entre les piliers du fond du diorama, sur le plateau du niveau 0. Ce module se décompose en deux parties : Une plateforme surélevée et un panneau vertical correspondant au mur de fond.
FreeCAD – Batcave Diorama – Main structure – Screenshot 003
FreeCAD – Batcave Diorama – Main structure – Screenshot 004
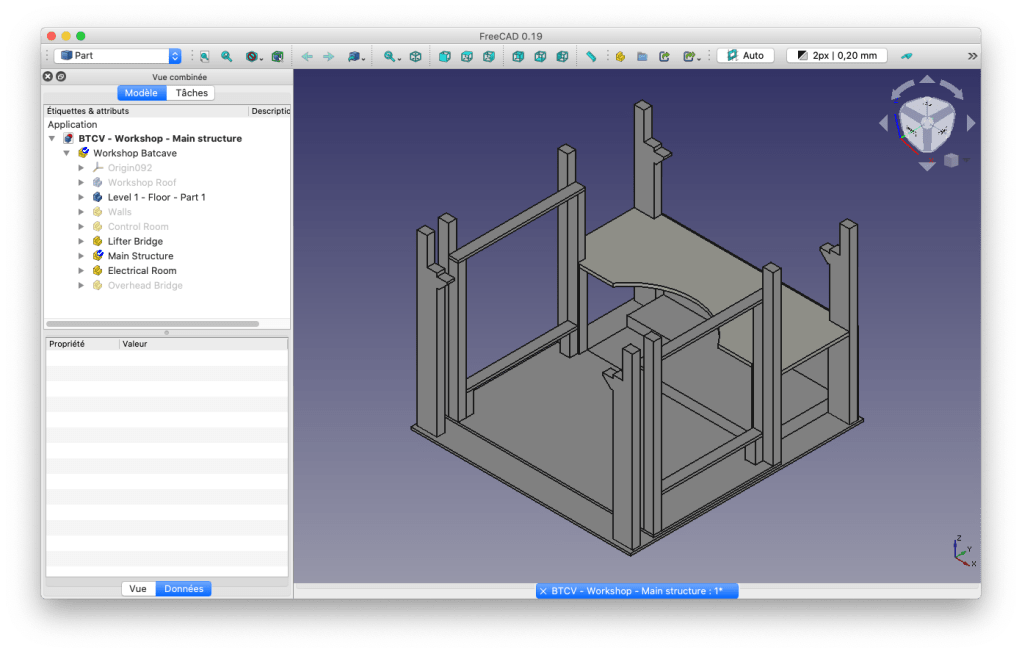
Screenshot 003 – Le module du pont élévateur est posé sur le plateau du niveau 0. Ce module se décompose en un plateau et quatre piliers, ainsi que des renforts pour supporter les quatre axes verticaux du pont élévateur. Ce module est lui aussi conçu pour être démontable, même si sa taille doit permettre de le manipuler d’une seule pièce.
Screenshot 004 – Le demi plateau du niveau 0, correspondant au niveau de l’atelier automatisé de la Batcave, est posé sur la partie basse des deux piliers principaux ainsi que les deux piliers du module du pont élévateur. Le design de ce plateau est conçu pour intégrer l’arrondi de la plateforme rotative au plus prêt, afin de permettre l’accès piéton à la plateforme.
FreeCAD – Batcave Diorama – Main structure – Screenshot 005
FreeCAD – Batcave Diorama – Main structure – Screenshot 006
Screenshot 005 – Le plateau du niveau 0 est posé sur les quatre piliers principaux de la structure.
Screenshot 006 – Le mur du fond est composé des panneaux verticaux du local technique et de la zone de contrôle. Les trois autres murs sont non définis jusque là ; les deux murs latéraux du diorama ainsi que le mur en face avant. Comme ces murs n’ont qu’un rôle esthétique, leurs designs n’est pas étudiés dans cette phase de conception préliminaire dont l’objectif consiste à focaliser sur les aspects fonctionnels du diorama.
Modélisation 3D
FreeCAD
La modélisation de la structure de l’atelier de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
L’animation 3D de présentation de la structure de l’atelier de la Batcave du projet BATLab112 a été réalisé par macros en langage Python sous FreeCad V0.19
Cet article présente l’intégration, la dernière étape de la conception préliminaire de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La simulation de l’intégration des équipements industriels, consiste à rassembler tous les équipements industriels conçus séparément, dans une modélisation globale de l’atelier de la Batcave du projet BATLab112. Le premier objectif est de contrôler la cohérence du dimensionnement respectif de ces équipements, ainsi que la conformité de leurs interactions fonctionnelles. Le deuxième objectif est de définir la structure de l’architecture générale de l’atelier.
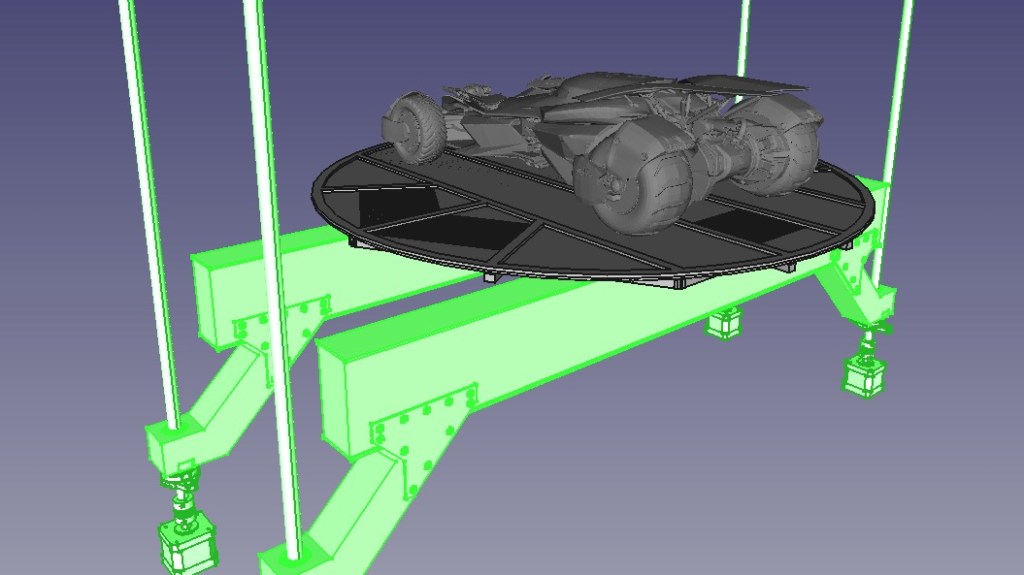
Les quatre équipements industriels sont intégrés ici dans leurs dernières versions issues de la conception préliminaire. La structure générale du diorama supportant ces équipements est symbolisée par les deux plans horizontaux. Cette mise en situation permet de contrôler si les dimensions du diorama prévues dans le cahier des charges sont respectées.
Vues de détails
Situation n°1
Situation n°2
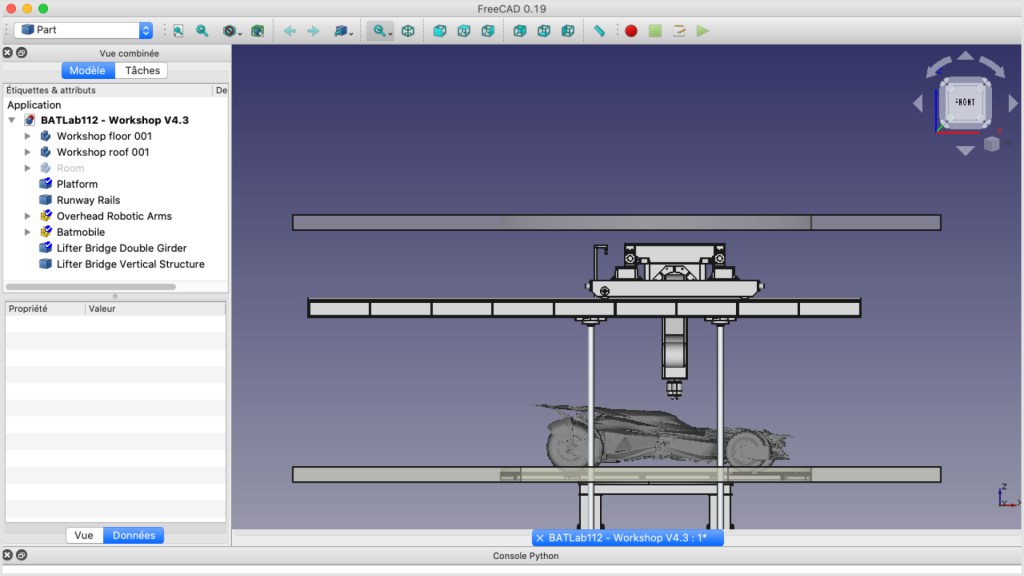
Cette simulation de l’intégration des équipements permet de contrôler l’implantation verticale des équipements.
La situation n°1 représente le pont roulant positionné au dessus de la plateforme de la Batmobile en position basse. Les bras robotiques en position initiale, passent au dessus de la Batmobile.
La situation n°2 représente la plateforme de la Batmobile en position haute. Les dimensions du pont élévateur assure le bon positionnement verticale de la plateforme par rapport au sol du niveau supérieur. Le dégagement du pont roulant permet l’élévation de la plateforme.
Simulation fonctionnelle 3D
L’intérêt de la simulation fonctionnelle en 3D, autrement dit visualiser à ce stade de la conception du projet, la mise en mouvement coordonné des équipements industriels composants l’atelier robotique de la Batcave du projet BATLab112, est double. Si la conception 3D permet une mise en situation statique des objets, la simulation 3D permet une appréhension plus fine des comportements dynamiques de ces objets. Cette approche a permis notamment d’expérimenter différents types d’organisation de l’atelier sans avoir besoin de réaliser de prototypes.
Modélisation 3D
FreeCAD
La modélisation de l’atelier de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
La simulation fonctionnelle 3D de la version présentée de la configuration de l’atelier est satisfaisante, notamment la cinématique de la Batmobile et de l’ensemble ; pont roulant et bras robotiques. La conception préliminaire de chacun des quatre équipements est donc validée.
La conception préliminaire de la plateforme rotative fait suite à la phase d’étude des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
Le concept du pont élévateur bipoutre 4 colonnes est l’association de deux concepts industriels, le pont élévateur 4 colonnes et le pont suspendu bipoutre. Les deux poutres se déplacent selon un axe vertical grâce aux actions synchronisées des 4 colonnes de levage. Chaque poutre est entrainée par 2 colonnes en vis-à-vis.
Dimensionnement
Le pont élévateur doit être en capacité de soulever la Batmobile dont la masse du modèle le plus lourd est de 3000 kg, ainsi que la plateforme rotative. dont la masse reste inférieure à 2000 kg. En prenant en compte un coefficient de sécurité et compte-tenu des normes en terme de capacité de levage constatée, le pont élévateur pris en référence pour le projet BATLab112 aura donc une capacité de levage d’environ 5 tonnes.
Design
Pour satisfaire aux objectifs de réalisme d’un diorama pédagogique, les designs des systèmes industriels de l’atelier du projet BATLab112 sont inspirés de designs de systèmes existants. Celui des poutres du pont élévateur 4 colonnes est inspiré de système tel que celui présenté dans la photo ci-contre.
Vues de détails
Modélisation 3D
FreeCAD
La modélisation du pont élévateur de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du pont élévateur équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Cet article présente la conception préliminaire de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.… Lire la suite →
Enjeux de la conception préliminaire de la plateforme rotative : influence du modèle de la Batmobile
La conception préliminaire s’inscrit dans la continuité du cahier des charges défini par la méthode de gestion de projet du projet BATLab112. Cette phase a pour objectif de formaliser le design général de la plateforme rotative destinée à accueillir la Batmobile au sein du diorama pédagogique de la Batcave à l’échelle 1/12.
Parmi l’ensemble des équipements industriels miniatures intégrés au diorama du projet BATLab112, la plateforme rotative constitue un élément central dont les choix de conception conditionnent largement les étapes ultérieures du développement. Plusieurs articles antérieurs ont mis en évidence l’importance stratégique du choix du modèle de Batmobile retenu. En effet, les dimensions de ce véhicule influencent l’ensemble de la chaîne de conception en déterminant le dimensionnement des différents systèmes industriels du diorama.
Au sein de ces systèmes, la plateforme rotative occupe une position singulière, en raison de son interaction directe avec la Batmobile. Elle assure à la fois la fonction de zone de stationnement et les fonctions mécaniques de rotation et de translation verticale. À ce titre, les dimensions hors tout du véhicule constituent un paramètre déterminant, impactant directement le dimensionnement et les caractéristiques fonctionnelles de la plateforme rotative.
Les articles dédiés à la définition de la Batmobile du projet BATLab112
Principes de conception mécanique de la plateforme rotative
La structure mécanique de la plateforme rotative s’appuie sur les enseignements issus de la phase de parangonnage, au cours de laquelle une analyse comparative de plateformes rotatives industrielles existantes a été menée. Cette démarche a permis d’identifier des principes de conception éprouvés, transposables au diorama du projet BATLab112.
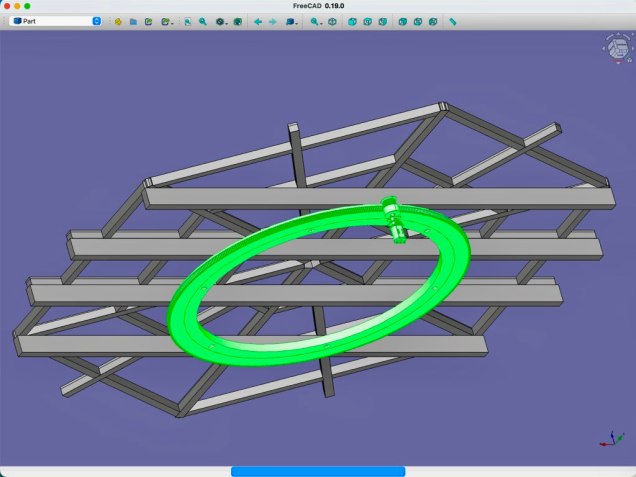
Architecture structurelle du plateau de la plateforme rotative
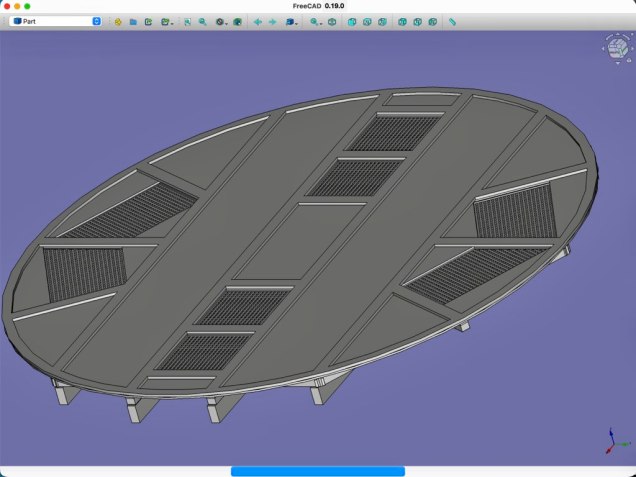
La structure portante de la plateforme est constituée de quatre longerons, définis comme des poutres parallèles orientées selon le sens de circulation de la Batmobile. Ces longerons supportent une structure alvéolaire formant un hexagone régulier, sur laquelle viennent se fixer l’ensemble des éléments constitutifs du plateau. L’ensemble de cette structure est solidaire de la bague extérieure d’un roulement à billes, assurant la fonction de rotation du système.
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la plateforme est modélisé. L’assemblage des différentes pièces n’est pas pris en compte ici.
Références esthétiques et cohérence avec le modèle de Batmobile
L’apparence générale du plateau de la plateforme rotative du diorama du projet BATLab112 s’inspire directement des dispositifs visibles dans la Batcave des films Batman v Superman: Dawn of Justice (2016) et Justice League (2021). Ce choix est motivé, d’une part, par une logique de cohérence esthétique avec le modèle de Batmobile retenu pour le projet, lui-même issu de ces productions cinématographiques, et, d’autre part, par le degré de réalisme et de niveau de détail particulièrement élevé de cette plateforme au regard des différentes représentations fictionnelles de la Batcave. Parmi l’ensemble des plateformes rotatives observables dans les œuvres consacrées à Batman, celle de ces films se distingue en effet comme l’une des plus abouties sur les plans visuel, mécanique et fonctionnel, ce qui en fait une référence pertinente pour un projet à vocation à la fois pédagogique et technique.
Fonctionnalité du design et contraintes mécaniques
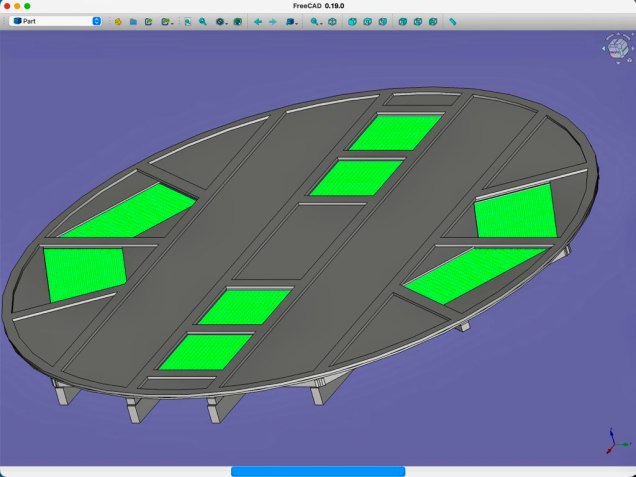
À l’échelle réelle, la plateforme rotative représentée correspond à un dispositif de six mètres de diamètre, animé d’un mouvement de rotation combiné à une translation verticale. Même à faible vitesse de rotation, le déplacement d’un plateau de cette dimension génère des phénomènes aérodynamiques susceptibles de créer une portance non négligeable. Cette portance entraîne des forces verticales pouvant provoquer des vibrations ou des sollicitations excessives sur la structure portante et sur les éléments fixés au plateau, compromettant la stabilité et la précision du système. Pour limiter ces effets, des ouïes ont été intégrées au plateau afin de favoriser le passage de l’air à travers la structure. En permettant à l’air de s’échapper plus facilement, ces ouvertures réduisent la pression exercée sur la face inférieure du plateau et atténuent ainsi les perturbations induites par la portance. Cette disposition contribue à maintenir la plateforme dans un état de fonctionnement stable, en minimisant les contraintes mécaniques et en optimisant la sécurité et la durabilité de l’ensemble du système.
Intégration environnementale : gestion de l’humidité et des écoulements
Par ailleurs, l’intégration de ces ouïes répond à des contraintes environnementales spécifiques liées à la localisation supposée de la Batcave. L’environnement cavernicole, caractérisé par une hygrométrie élevée et des phénomènes possibles de ruissellement, impose en effet une prise en compte des conditions d’exploitation du dispositif. Les ouvertures ménagées dans le plateau facilitent l’évacuation des eaux susceptibles de s’accumuler à sa surface, limitant ainsi les risques de stagnation, de corrosion prématurée des composants mécaniques et de dégradation fonctionnelle du système. Cette approche contribue à renforcer la crédibilité technique du dispositif tout en assurant une cohérence accrue entre le design de la plateforme et le contexte environnemental dans lequel elle est intégrée.
Dimensions de la plateforme rotative du projet BATLab112
L’analyse croisée des articles consacrés au parangonnage des plateformes rotatives industrielles, au cahier des charges de l’atelier automatique de la Batcave, ainsi qu’aux différentes étapes de définition et de conception de la Batmobile du projet BATLab112, permet de définir les dimensions, et plus particulièrement le diamètre, de la plateforme rotative intégrée au diorama pédagogique à l’échelle 1/12.
Apports du parangonnage industriel dans le dimensionnement d’une plateforme rotative à l’échelle 1/12
Les études de parangonnage ont mis en évidence que, dans un contexte industriel réel, les plateformes rotatives dédiées à la manutention ou à l’orientation de véhicules sont systématiquement dimensionnées à partir de l’encombrement maximal de l’objet transporté, auquel s’ajoutent des marges fonctionnelles garantissant la sécurité, la fluidité des mouvements et la compatibilité avec les systèmes périphériques. Cette logique a été transposée au projet BATLab112 afin de garantir un haut niveau de réalisme pédagogique.
Contraintes du cahier des charges de l’atelier automatique de la Batcave
Le cahier des charges de l’atelier automatique et son analyse détaillée ont ensuite permis d’identifier plusieurs contraintes structurantes : l’enveloppe globale du diorama, limitée à environ un mètre de côté, la nécessité d’autoriser une rotation complète de la Batmobile sans déplacement longitudinal, ainsi que l’intégration de la plateforme dans un système plus large comprenant un dispositif de levage et des équipements d’atelier. Ces contraintes fixent un cadre dimensionnel strict au sein duquel la plateforme rotative doit s’inscrire.
Influence du modèle de Batmobile sur le diamètre de la plateforme rotative
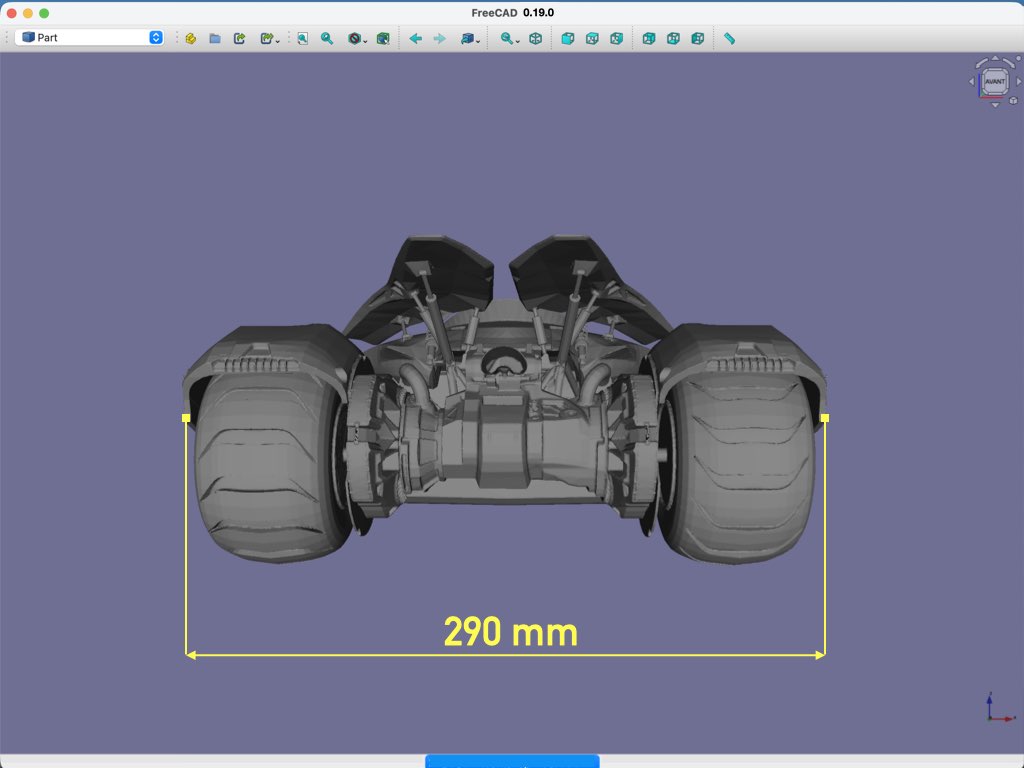
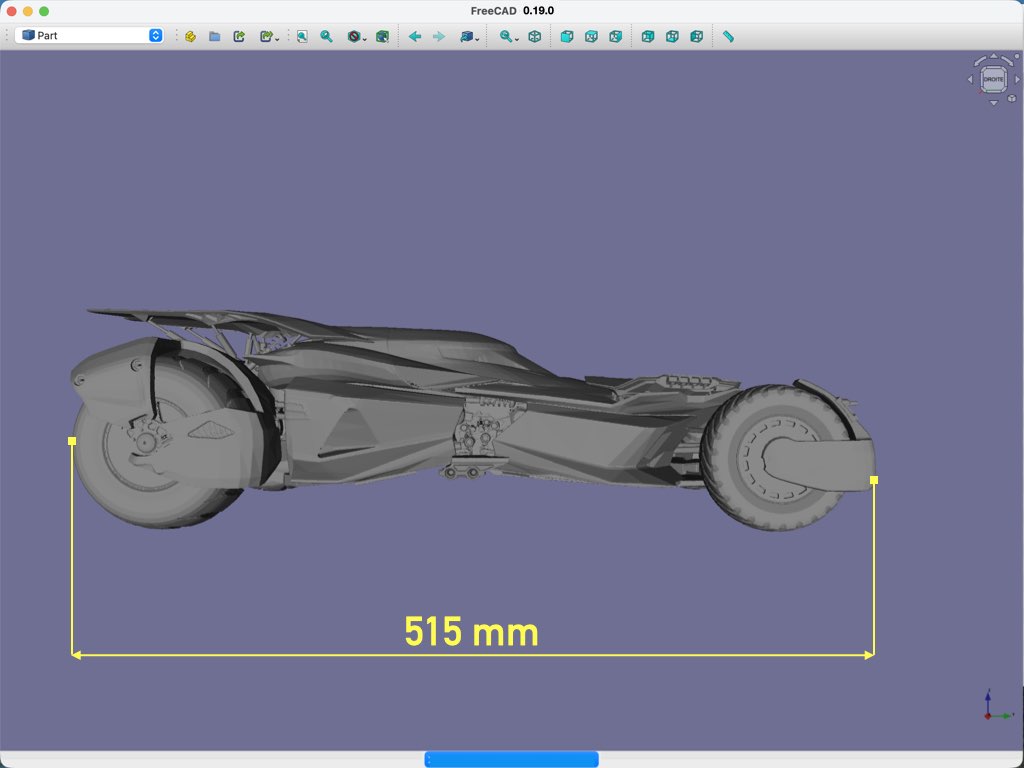
La définition du modèle de Batmobile retenu pour le diorama constitue un élément déterminant du dimensionnement. À l’échelle 1/12, la longueur théorique maximale de la Batmobile de référence est estimée à environ 600 mm. Sur cette base, le diamètre de la plateforme rotative a été fixé à 600 mm, valeur correspondant au minimum nécessaire pour permettre la rotation complète du véhicule dans des conditions réalistes et fonctionnelles, tout en respectant les contraintes d’encombrement du diorama.
Toutefois, la phase de conception détaillée de la Batmobile apporte un élément complémentaire renforçant la pertinence de ce choix. En effet, le modèle physique effectivement utilisé dans le diorama présente une longueur réelle inférieure à 600 mm à l’échelle 1/12. Ce constat introduit une marge dimensionnelle supplémentaire entre l’encombrement du véhicule et le diamètre de la plateforme. Cette marge contribue à sécuriser le fonctionnement du système rotatif, à faciliter les tolérances d’assemblage et à préserver la liberté de mouvement lors des phases de rotation et de levage, sans remettre en cause la cohérence globale du design.
Validation finale du diamètre pour la plateforme rotative du diorama BATLab112
Ainsi, le diamètre de 600 mm retenu pour la plateforme rotative apparaît non seulement comme une réponse directe aux contraintes issues du cahier des charges et du modèle théorique de Batmobile, mais également comme un choix robuste et conservatif, renforcé par le fait que le véhicule réel intégré au diorama est légèrement plus compact que la valeur maximale initialement considérée.
En conclusion, la plateforme rotative du projet BATLab112, dimensionnée à 600 mm de diamètre à l’échelle 1/12, constitue un compromis optimal entre réalisme industriel, contraintes d’intégration spatiale, exigences fonctionnelles et objectifs pédagogiques. La longueur effective inférieure à 600 mm du modèle physique de Batmobile confirme a posteriori la validité de ce dimensionnement et garantit une exploitation fiable et cohérente du système au sein du diorama de la Batcave.
Conception du système de transmission de la rotation
L’objectif est d’obtenir un mouvement de rotation fluide, précis et suffisamment coupleux, tout en respectant les contraintes d’encombrement propres à l’échelle 1/12.
Définition des composants mécaniques
La conception du système de transmission de la rotation nécessite, dès les premières étapes, l’identification du type de moteur, du pignon d’entraînement et de la couronne dentée à utiliser. Ces choix conditionnent la faisabilité mécanique de l’ensemble, en déterminant le rapport de réduction, le couple transmissible et l’intégration à l’échelle 1/12. Sans cette définition préalable, le dimensionnement de la transmission ne pourrait être validé de manière réaliste.
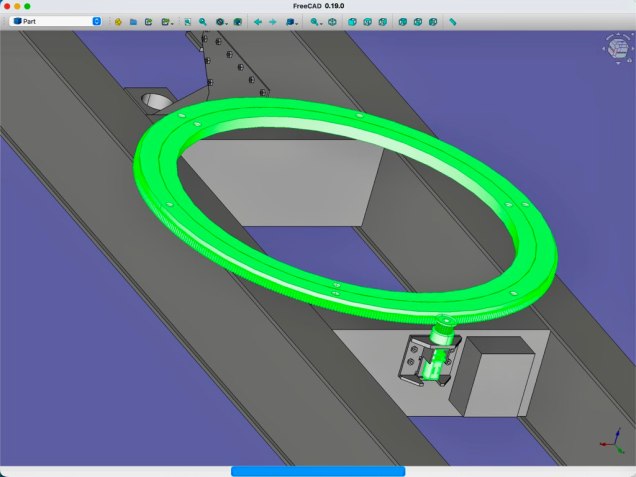
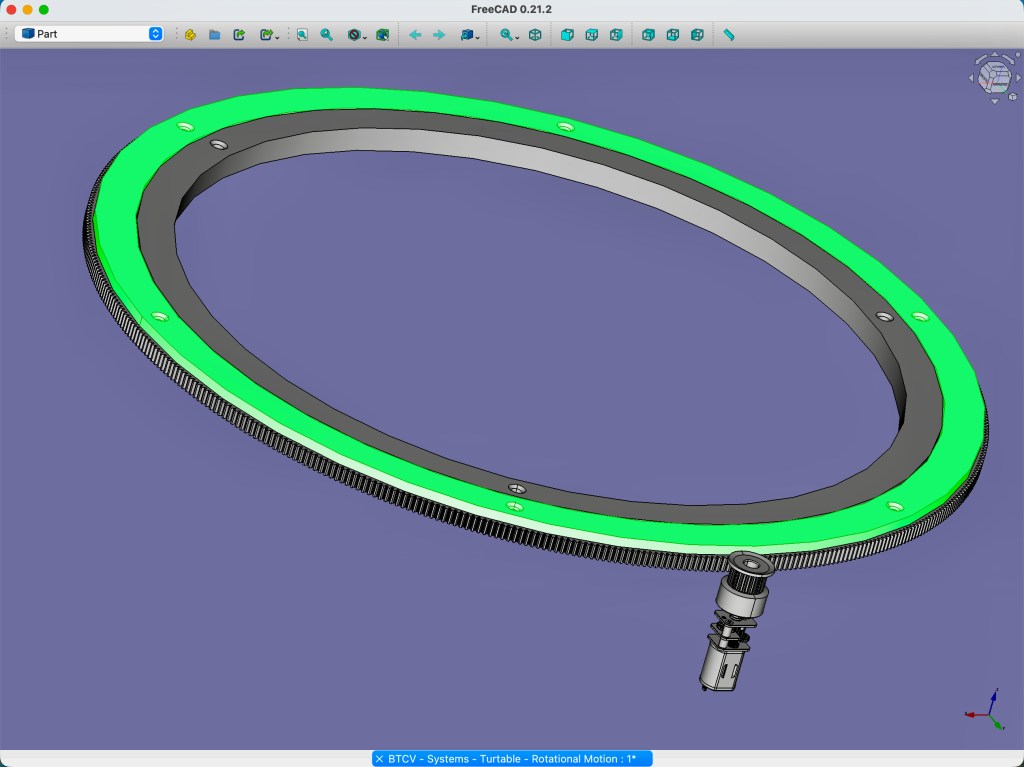
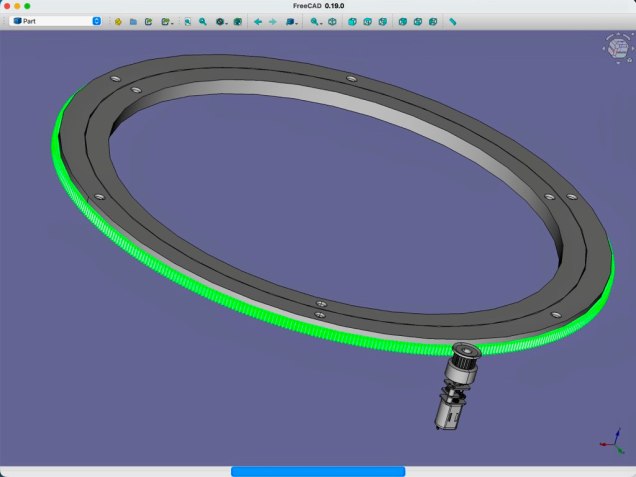
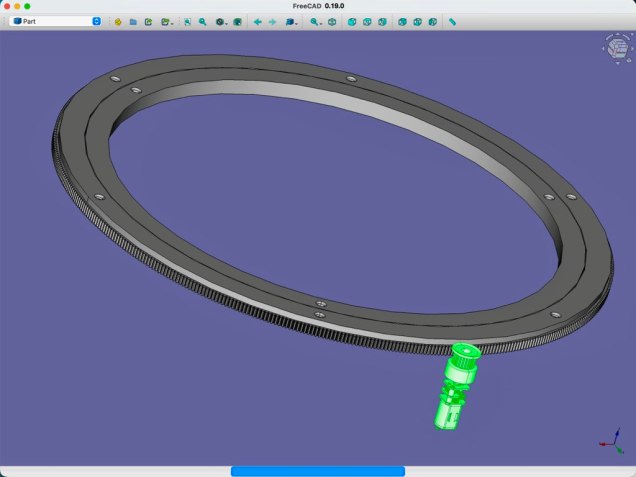
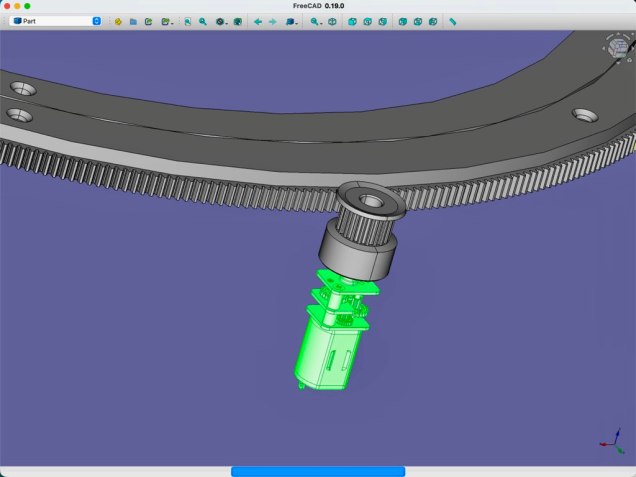
La solution retenue associe un roulement à billes de type Lazy Susan assurant le support mécanique du plateau, et un système poulie–courroie crantée utilisé comme mécanisme de transmission circulaire. La courroie, collée sur la périphérie du roulement, joue le rôle de couronne dentée, tandis qu’une poulie montée sur l’axe du moteur agit comme pignon menant. Ce choix permet de détourner des composants standards issus de l’impression 3D pour un usage en rotation continue.
Poulies
Nombre de dents : 20
Diamètre de l’axe : 5mm
Diamètre total : 15mm
Hauteur totale : 15mm
Courroie
Longueur : 2000mm
Largeur : 6 mm
Roulement à billes Lazy Susan 12″
Corps en aluminium
Billes en acier
Diamètre extérieur : 12″ – 300mm
Hauteur : 3/4″ – 19mm
Poids : 0,62 kg
Calcul du nombre de dents de la couronne
Diamètre primitif de la couronne
Dans une première approximation, compte tenu de la faible épaisseur de la courroie, nous allons considérer que le diamètre primitif est identique au diamètre intérieur du roulement Lazy Susan.
Diamètre primitif = 254 mm
Calcul du module de la couronne
La couronne utilisée est de type GT2 donc ayant un pas de 2mm. D’après la théorie des engrenages, le module est le résultat du quotient du pas, exprimé en millimètre, par le nombre π.
Module = 2 / π Module = 0,64
Calcul du nombre de dents
D’après la théorie des engrenages, la valeur du diamètre primitif est le résultat de la multiplication du module par le nombre de dents. N : Nombre de dents M : Module D : Diamètre primitif si D = M * N donc N = D / M
Nombre de dents = D / M Nombre de dents = 300 / 0,64 Nombre de dents = 469 Le nombre de dents sera arrondi à 470
Calcul du rapport de réduction
D’après la théorie des engrenages, le rapport des vitesses et égale au rapport inverse des nombres de dents. R : Rapport de réduction NP : Nombre de dents du pignon (poulie) NR : Nombre de dents de la roue (Couronne) VR : Vitesse de la Roue VP : Vitesse du pignon
Rapport de réduction = NP / NR Rapport de réduction = 20 / 470 Rapport de réduction = 0,042
Motorisation
Le dimensionnement de l’engrenage de transmission de la plateforme rotative permet de définir précisément le rapport nécessaire entre le moteur d’entraînement et la rotation du plateau.
Définition des composants mécaniques
Le choix du moteur d’entraînement du système de transmission de la rotation s’est porté sur un micro-motoréducteur à couple élevé, présentant un rapport de réduction de 1:1000. Ce type de motorisation offre un compromis adapté entre compacité, couple disponible et facilité d’intégration, en cohérence avec les contraintes mécaniques et spatiales imposées par l’échelle 1/12.
Ce motoréducteur est décliné en plusieurs versions de vitesse de rotation nominale, permettant d’ajuster précisément la vitesse angulaire du plateau rotatif en fonction du rapport de transmission retenu. Cette modularité facilite la validation de la faisabilité du système et garantit une rotation lente, maîtrisée et compatible avec l’objectif pédagogique du diorama.
La vitesse de rotation du moteur est celle du pignon dans la transmission par engrenage. Le calcul montre que la vitesse du moteur doit donc être environ 24 fois plus grand que la vitesse souhaitée de la plateforme.
R = VR / VP VP = VR * (1 / R) Vitesse Pignon = Vitesse Roue * (1/0,042) Vitesse Pignon = Vitesse Roue * 23,8
Définition de la vitesse de rotation nominale du moteur
Pour une vitesse cible de rotation de la plateforme fixée à 1 tr/min, et compte tenu d’un rapport de réduction de 24, la vitesse nominale requise du moteur est de 24 tr/min. Le motoréducteur retenu étant disponible dans une version standard à 20 tr/min, la vitesse effective de rotation de la plateforme est légèrement inférieure à l’objectif initial. Dans cette configuration, un tour complet de la plateforme est réalisé en 1 minute et 12 secondes, valeur jugée compatible avec les contraintes fonctionnelles et pédagogiques du projet.
Modélisation 3D de la plateforme rotative de la Batmobile du projet BATLab112
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire de la plateforme rotative équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
L’article présente la conception préliminaire du poste électrique HT/BT du diorama BATLab112, détaillant l’architecture, la modélisation des structures mécaniques et le dimensionnement des composants. Il décrit la conversion de la tension secteur 230 V AC en tensions continues adaptées, ainsi que l’intégration des dispositifs de raccordement, de protection et de distribution au sein du réseau électrique…
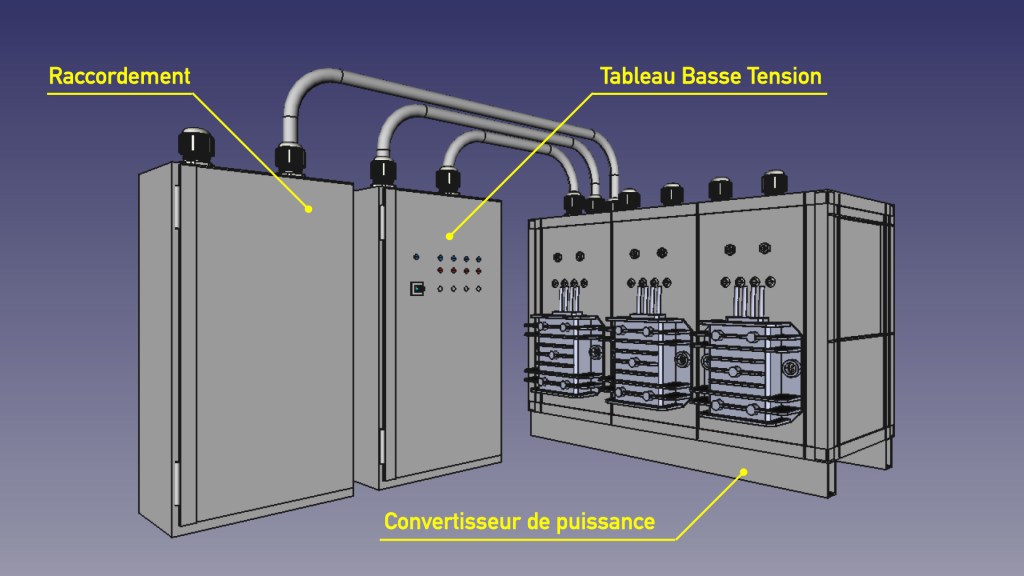
Armoire de raccordement électrique : interface secteur du réseau de la Batcave
Le poste HT/BT est l’élément amont du réseau de distribution électrique du diorama de la Batcave du projet BATLab112. Ce poste HT/BT intègre les fonctions suivantes :
Le raccordement du diorama au secteur 230V 50Hz
Le convertisseur de tension AC/DC
La commande des tensions de sorties du convertisseur
Raccordement électrique du diorama au réseau domestique 230 VAC
Module de raccordement électrique du diorama : Transposition à l’échelle 1/12 du diorama
À l’échelle réelle (1:1), le module de raccordement, implanté en amont du poste HT/BT, assure l’interface entre un réseau de distribution électrique basse tension (BT) et un réseau haute tension (HT).
À l’échelle du diorama, cette fonction est transposée au sein d’une armoire de raccordement dédiée, dont le rôle est d’assurer la connexion du réseau électrique de la Batcave au réseau électrique domestique 230 V – 50 Hz. L’entrée de cette armoire autorise un raccordement direct à une prise secteur standard, au moyen d’un câble électrique de type 3G 1,5 mm².
Architecture interne de l’armoire de raccordement du diorama
L’architecture de l’armoire de raccordement au réseau électrique domestique 230VAC repose sur un ensemble de dispositifs mécaniques et électroniques assurant à la fois le raccordement des câbles et la fonction de sectionneur.
Deux passe-câbles
Deux borniers de raccordement
Un sectionneur
Les passe-câbles
Les deux passe-câbles assurent la fixation mécanique et la protection des câbles, tant à l’entrée, en provenance de la prise secteur, qu’à la sortie, vers le convertisseur. Ces dispositifs permettent de maintenir les câbles en position, d’éviter toute traction ou flexion excessive et de prévenir l’usure ou les dommages mécaniques au niveau des points de passage. En garantissant un cheminement contrôlé et sécurisé des câbles, les passe-câbles contribuent à la fiabilité et à la sécurité de l’ensemble du système électrique du diorama.
Les borniers de raccordement
Les deux borniers de raccordement assurent la connexion électrique sécurisée des câbles en entrée et en sortie du système. Ces borniers constituent des points de jonction essentiels, permettant de relier de manière fiable le câble provenant de la source d’alimentation et celui dirigé vers le convertisseur ou les sous-systèmes. Outre leur rôle de connexion, ils facilitent les opérations de contrôle, de maintenance et de remplacement des câbles, tout en garantissant la continuité du circuit électrique et la sécurité des utilisateurs.
Le sectionneur
L’interrupteur-sectionneur joue un rôle essentiel dans la sécurité et la gestion de l’alimentation électrique du diorama. Il permet d’isoler complètement le système vis-à-vis du réseau électrique, interrompant le flux de courant de manière sûre et contrôlée. Cette fonction d’isolement est indispensable lors des opérations de maintenance, de modification du câblage ou en cas de défaillance électrique, afin de protéger à la fois les utilisateurs et les équipements. En outre, le sectionneur garantit que le diorama peut être mis hors tension rapidement et de manière fiable, sans risque d’arc électrique ni de dommage aux composants connectés.
Principe de fonctionnement de l’armoire de raccordement électrique
Une fois le raccordement au réseau secteur réalisé par l’intermédiaire du bornier d’entrée, le basculement de l’interrupteur-sectionneur en position fermée permet l’alimentation en énergie électrique du convertisseur de puissance du diorama.
À l’inverse, le positionnement de l’interrupteur-sectionneur en position ouverte assure l’isolement complet du diorama vis-à-vis du réseau électrique domestique. Cette armoire constitue l’unique point de raccordement au secteur, afin de garantir un niveau élevé de sécurité pour les utilisateurs et de maîtriser l’ensemble des flux énergétiques alimentant le diorama.
Modélisation 3D des composants électriques de l’armoire de raccordement
Modèle 3D du presse étoupe, passe câble, utilisé dans les 3 modules du poste HT/BT.
Modèle 3D du bloc de jonction, 230VAC, utilisé comme bornier de raccordement.
Modèle 3D de support de Led, utilisé comme passe câble du module sectionneur.
Modèle 3D des interrupteurs 230VAC utilisés comme sectionneur général du poste HT/BT.
Le convertisseur de puissance du poste électrique du diorama
Convertisseur de puissance : Transposition à l’échelle 1/12 du diorama
A l’échelle 1:1, le transformateur est l’équipement central du poste HT/BT. Il assure la transformation de la Haute Tension alternative du réseau de distribution électrique régional, en Basse Tension alternative 230V 50Hz.
A l’échelle du diorama, le transformateur est remplacé par un module – convertisseur de puissance -, qui assure la conversion de la tension secteur alternative 230V 50Hz en basses tensions continues compatibles avec les composants électroniques et actionneurs du projet ; électronique, moteurs…
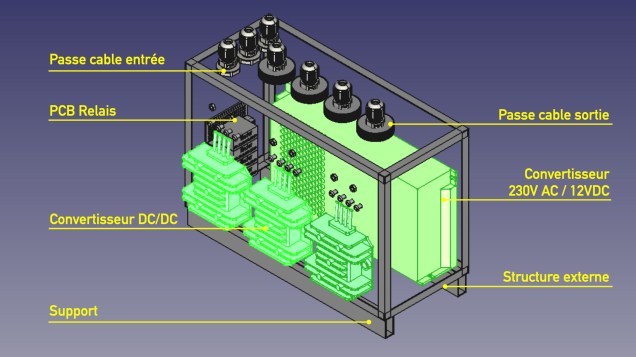
Architecture du convertisseur de puissance
L’architecture du convertisseur de puissance du diorama repose sur un ensemble de dispositifs mécaniques et électroniques assurant à la fois la conversion des niveaux de tension et la distribution sécurisée de l’énergie électrique vers les différents sous-systèmes.
Des passes câbles d’entrées et de sorties
Un convertisseur 230VAC / 12VDC
Des convertisseurs DC/DC
Une carte électronique à base de relais électromagnétiques
Une infrastructure mécanique
Les passe-câbles d’entrée
Les câbles d’entrée du convertisseur sont maintenus mécaniquement par trois passe-câbles distincts. Ceux-ci concernent le câble d’alimentation secteur en 230VAC provenant de l’armoire de raccordement, le câble de sortie en 12VDC à destination du tableau basse tension, ainsi que le câble de commande issu de ce même tableau. Ces éléments garantissent la tenue mécanique, la protection et le cheminement contrôlé des liaisons électriques.
Les passe-câbles de sortie
En sortie, quatre passe-câbles assurent le maintien mécanique et l’acheminement des câbles correspondant aux différentes tensions continues distribuées, notamment les tensions de 5 V DC, 6 V DC et 12 V DC, destinées à l’alimentation des composants électroniques et des actionneurs du diorama.
Chaîne de conversion électrique AC/DC et DC/DC du diorama
Sur le plan fonctionnel, un convertisseur AC/DC assure la transformation de la tension secteur 230V – 50 Hz en une tension continue de 12VDC. Cette tension intermédiaire est ensuite traitée par des convertisseurs DC/DC, dont le rôle est d’abaisser et de réguler la tension afin de fournir des niveaux adaptés, tels que 5VDC et 6VDC, compatibles avec les exigences électriques des sous-systèmes du diorama.
Carte électronique de commutation à base de relais électromagnétiques
Enfin, une carte électronique dédiée, intégrant des relais de puissance, assure la commutation et la distribution contrôlée des différentes tensions continues de sortie, contribuant à la gestion fonctionnelle et à la sécurisation de l’alimentation électrique globale du diorama.
Principe de fonctionnement du convertisseur de puissance
Lorsque l’interrupteur sectionneur de l’armoire de raccordement est basculé en position haute, le convertisseur 230VAC/12VDC du convertisseur de puissance, est alors alimenté en énergie électrique. Il fournit une tension de 12V continue en sortie. Cette tension alimente alors le panneau basse tension pour contrôler l’alimentation électrique des convertisseurs DC/DC.
Lorsque le convertisseur 230VAC/12VDC est sous tension, et que le bouton d’arrêt d’urgence du panneau basse tension est relâché, un appui sur un des boutons poussoirs du panneau de commande, déclenche la commande d’un relais. Ce relais commute la tension du convertisseur DC/DC correspondant, en sortie du convertisseur de puissance.
Modélisation 3D des composants électriques du convertisseur de puissance
Modèle 3D de l’alimentation utilisée comme convertisseur 230VAC/12VDC.
Modèle 3D des convertisseurs de tensions 12VDC/6VDC et 12VDC/5VDC.
Modèle 3D des borniers utilisés sur la carte des relais de.commutation des tensions de sortie.
Modèle 3D des relais utilisés pour commuter les tensions de sorties du convertisseur.
L’armoire de commande des basses tensions du diorama
Armoire de commande des basses tensions : Transposition à l’échelle 1/12
A l’échelle 1:1, le tableau BT permet de répartir l’énergie électrique sur les différents départs issus du poste de transformation. A l’échelle du diorama, cette armoire centralise les commandes des tensions continues en sortie du convertisseur.
Architecture de l’armoire de commande des basses tensions
L’architecture de l’armoire de commande des basses tensions du diorama repose sur un ensemble de dispositifs mécaniques et électroniques assurant à la fois le raccordement des câbles de distribution des basses tensions et la commutation de ces tensions vers les différents sous-systèmes.
Des passe-câbles d’entrées et de sorties
Un Bernier de raccordement des câbles
Une carte électronique à base de relais électromagnétiques
Une carte électronique des commandes manuelles
Une structure matérielle
Les passe-câbles d’entrée et de sortie
Les deux passe-câbles assurent le maintien mécanique du câble en entrée (depuis la sortie du convertisseur 230VAC/12VDC) et en sortie (vers la carte électronique des relais).
Le Bornier de raccordement
Le bornier de raccordement assure la connexion électriques des câbles.
La carte électronique des commandes manuelles
La carte électronique – PCB des commandes -, centralise tous les circuits de commande des tensions de sortie du convertisseur de puissance.
La carte électronique des relais de commutation des basses tensions
La carte électronique – PCB des relais -, assure la commutation des différentes tensions de sortie du convertisseur de puissance, sous le contrôle des commandes.
Les cartes électroniques sont réalisées en logique câblée, à partir de relais électromagnétiques, de boutons poussoirs et de voyants de visualisation réalisés à partir de LEDs.
Principe de fonctionnement de l’armoire de commande des basses tensions
Lorsque le convertisseur 230VAC / 12VDC est raccordé au réseau électrique domestique lors du basculement de l’interrupteur sectionneur de l’armoire de raccordement en position haute, il délivre en sortie une tension de 12V DC. Cette tension est alors utilisée pour alimenter en énergie électrique, une carte électronique de commande et une carte de relais qui contrôlent les tensions de sortie du convertisseur de puissance.
Modélisation 3D des composants électriques de l’armoire de commande des basses tensions
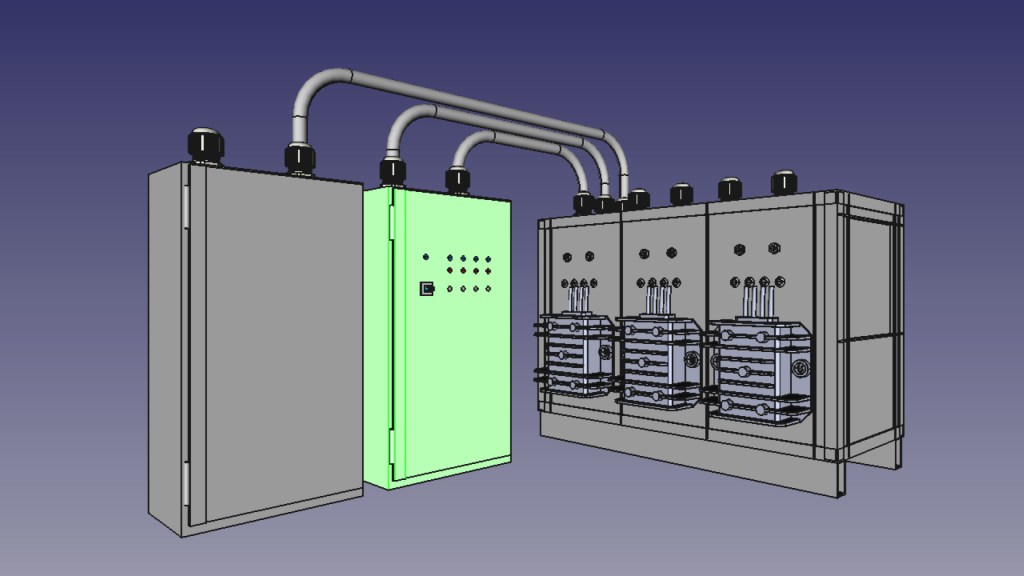
Modélisation 3D avec FreeCAD du poste électrique du diorama à l’échelle 1/12
La modélisation 3D du poste électrique du diorama de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCAD.
Le projet BATLab112 utilise la version 0.21.2 du modeleur 3D FreeCAD pour la conception du diorama de la Batcave à l’échelle 1/12. FreeCAD permet de structurer la conception du diorama en amont de sa fabrication, de visualiser des volumes, vérifier des proportions et anticiper des contraintes techniques. L’utilisation de FreeCAD constitue un support méthodologique rigoureux pour la réalisation précise et cohérente de l’ensemble.
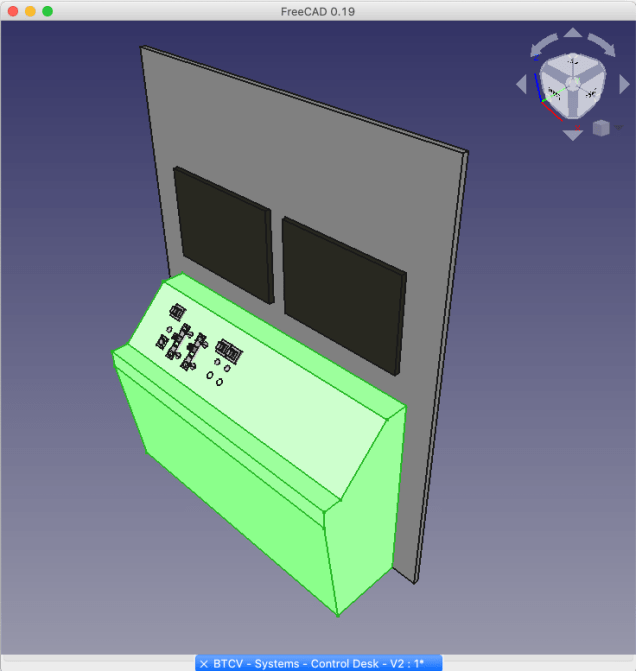
Dans le cadre de cette phase de conception préliminaire, seule la géométrie générale de la structure mécanique de la console de commande est modélisée. L’assemblage détaillé des différentes sous-parties n’est pas abordé à ce stade. L’objectif principal consiste à valider la faisabilité technique du concept retenu, ainsi que son intégration fonctionnelle et dimensionnelle à l’échelle 1/12. La définition précise des modalités d’assemblage des sous-ensembles sera réalisée ultérieurement, lors de la conception détaillée et de la fabrication du premier prototype.
GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
La conception préliminaire de la console de commande fait suite à la phase d’étude préliminaire des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
Le design retenu pour ce premier prototype, issu de la phase de benchmarking, est constitué de deux sous-ensembles : un pupitre et un panneau vertical.
Vues de détails
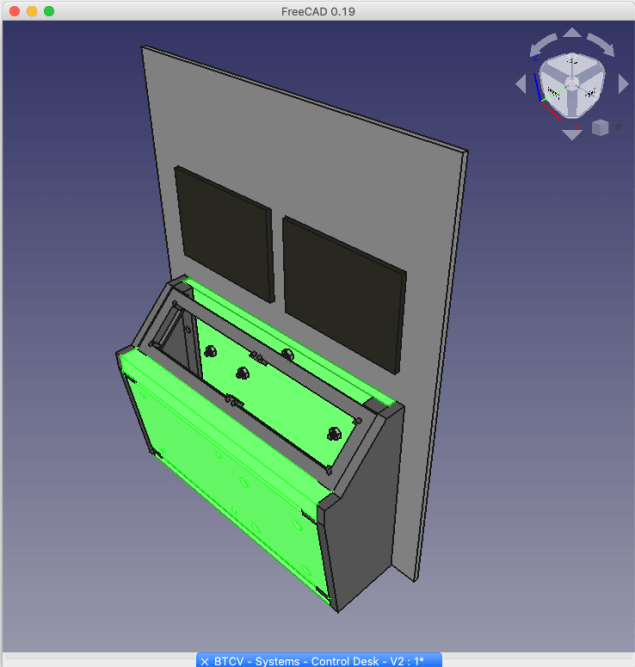
Pupitre
Le design du pupitre présente un panneau incliné pour supporter les commandes manuelles et un panneau avant légèrement incliné vers l’intérieur pour une meilleur approche de l’opérateur.
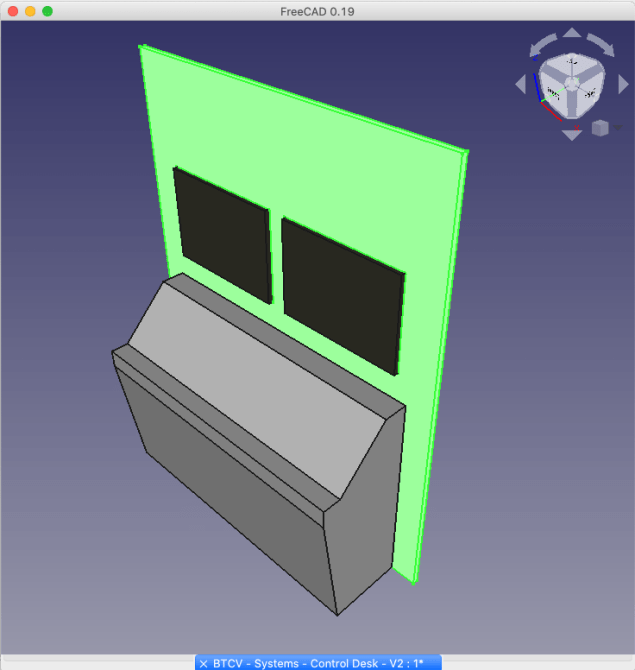
Panneau vertical
Le design panneau vertical est conçu pour intégrer deux écrans de contrôle et supporter deux cartes Arduino fixées à l’arrière.
Structure du pupitre
Screenshot n°1
Screenshot n°2
Screenshot n°3
Le design des deux pièces latérales (screenshot n°1) donne la forme générale au pupitre selon les critères retenues lors de la phase benchmarking. Compte-tenu de la complexité du design de ces pièces, elles seront réalisées par impression 3D.
Le design du cadre incliné (screenshot n°2) est conçu pour pouvoir fixer 2 PCB au format 20×80 mm, côte à côte. Cette pièce sera aussi réalisée par impression 3D pour des raisons de précisions de réalisation.
Les autres pièces (screenshot n°3) constituant le pupitre, seront réalisées en bois pour assurer la robustesse de l’ensemble et faciliter le travail de percage lors de la fabrication du prototype.
Modélisation 3D
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
La conception préliminaire de la plateforme rotative fait suite à la phase d’étude des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
Dimensionnement
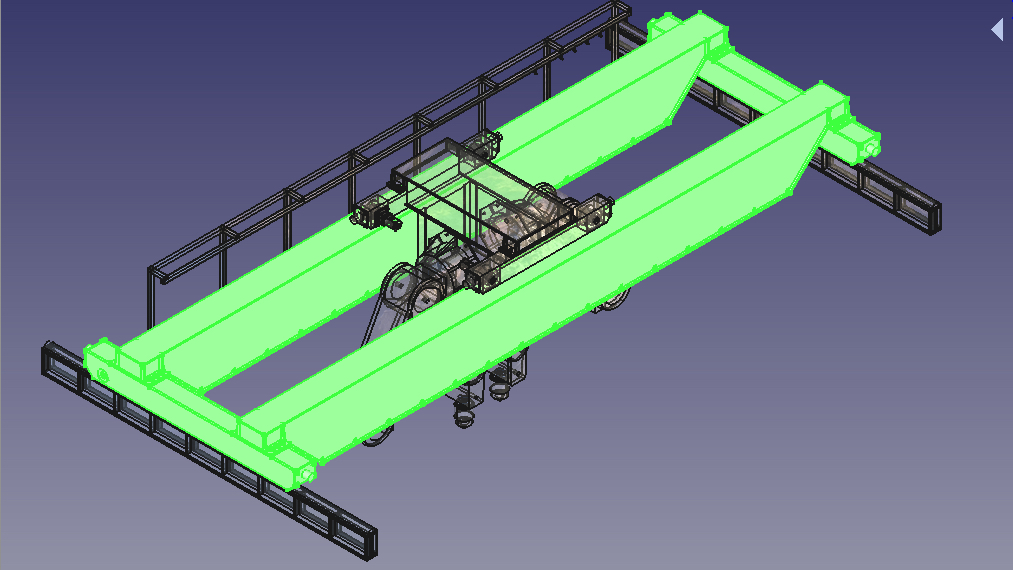
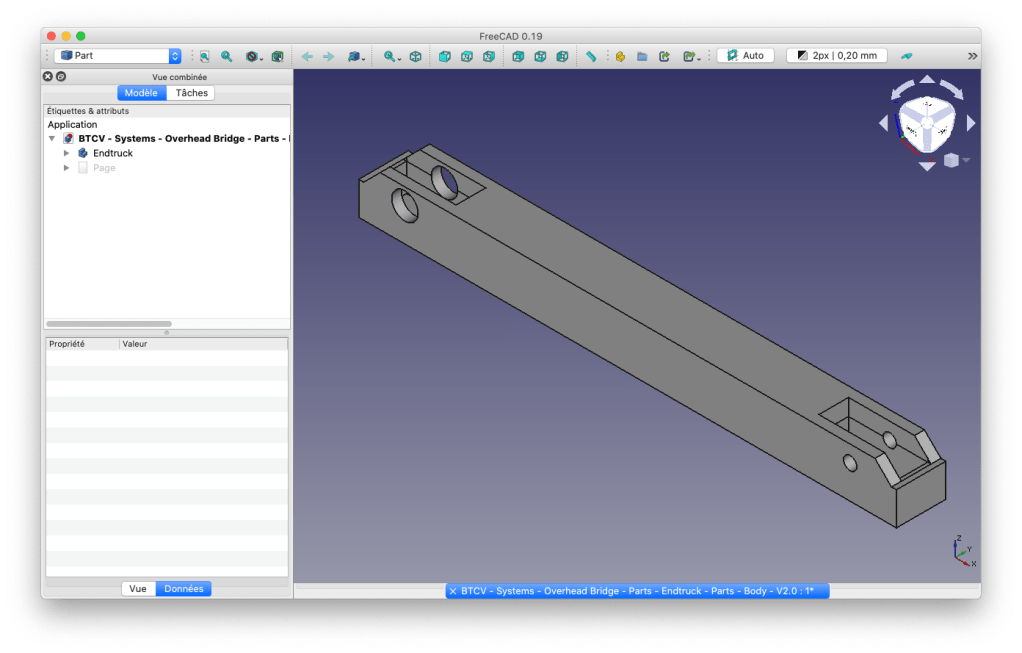
Pour dimensionner le pont roulant bipoutre suspendu, de l’atelier automatique de la Batcave du projet BATLab112, le bras robotique le plus puissant (et le plus lourd) du marché à l’heure où cet article est édité, est pris comme référence. Ces bras robotiques ont une masse totale de 22000 kg. A cela il faut encore ajouter la masse de la charge utile. Si les bras robotiques doivent pouvoir soulever la Batmobile dont la masse du modèle le plus lourd est de 3000 kg, nous obtenons une masse utile de 25000 kg. En prenant en compte un coefficient de sécurité et compte-tenu des « normes » en terme de capacité de levage constatée, le pont roulant bipoutre pris en référence pour le projet BATLab112 aura donc une capacité de levage d’environ 40 tonnes.
Ce premier design du sommier du pont roulant inclut déjà les empreintes des roulements à billes et des axes de rotation des roues. A ce stade de conception préliminaire, la faisabilité technique de fabrication de ce design n’a pas été évaluée.
Le design des poutres du pont roulant inclut les platines de fixation sur les sommiers.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
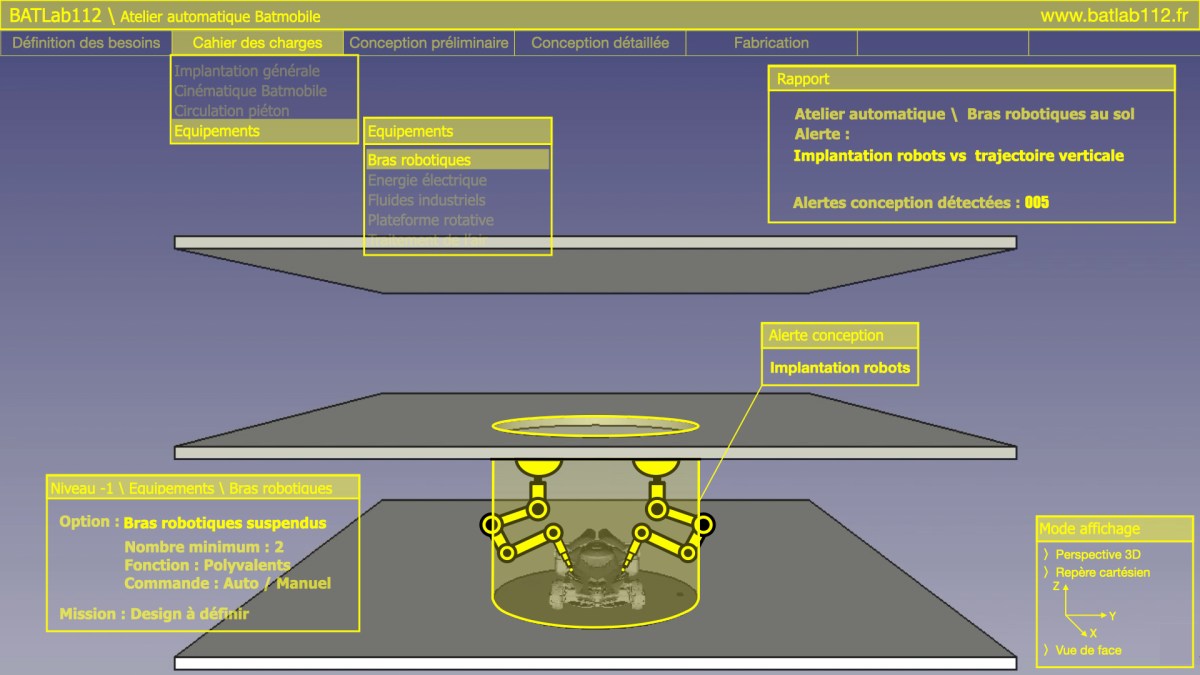
Les bras robotiques du projet BATLab112 sont entièrement conçus pour répondre aux exigences du projet. Même si il existe de nombreux modèles commerciaux de bras robotiques dits d’apprentissage, la taille de ces modèles n’est pas forcément compatible avec l’échelle de réalisation au 1:12 du projet et leur esthétique n’est jamais conforme à celle d’un robot industriel.
Les bras robotiques disposent de 4 degrés de liberté, autrement dit 4 articulations. Un moteur installé dans chaque articulation en assure la rotation.
Modélisation 3D
Evolution du design des versions des bras robotiques
Le design des bras robotiques est contraint par l’espace disponible dans l’atelier automatisé de la Batcave, notamment la hauteur sous plafond. A cette contrainte s’ajoute la contrainte de pouvoir accéder à tous les points de la surface de la Batmobile.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
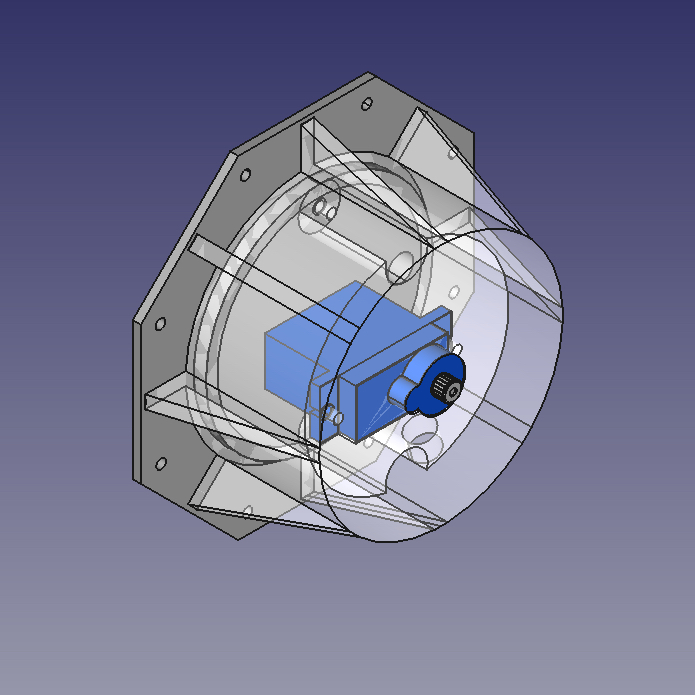
La base est la pièce qui assure la fixation du bras robotique sur le pont roulant bipoutre. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 1/2 de l’épaule.
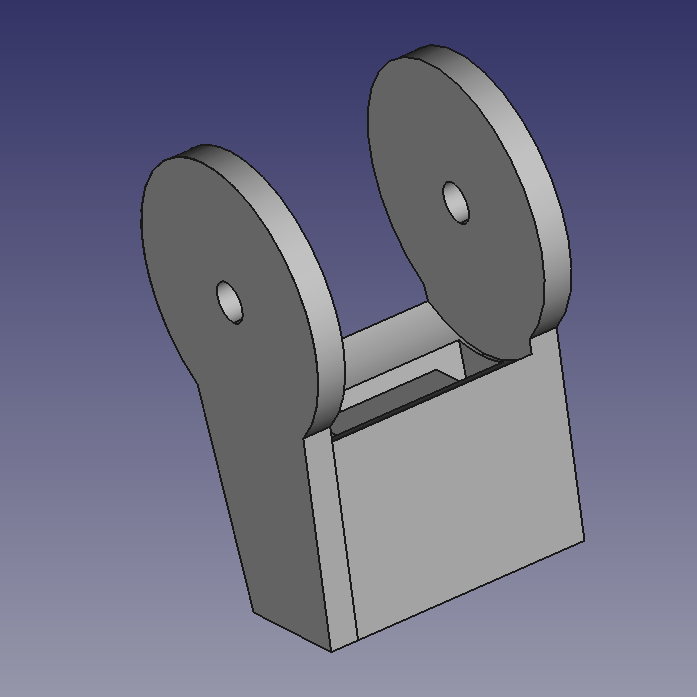
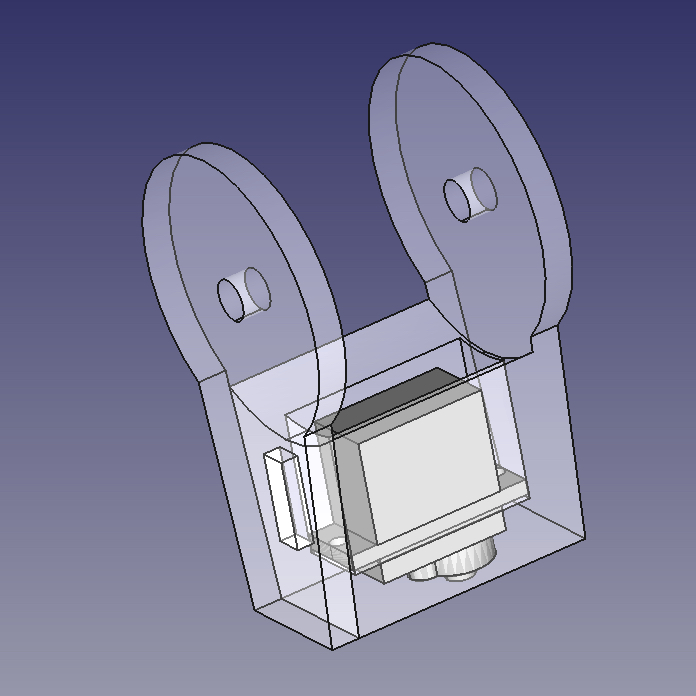
Epaule
La pièce constituant l’épaule du bras robotique se fixe sur la base. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 2/2 de l’épaule.
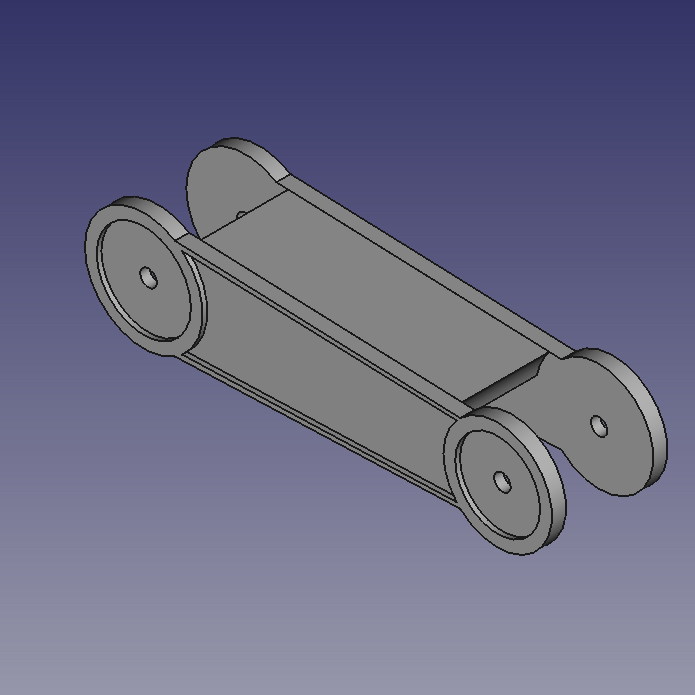
Bras et Avant-bras
Coude
La pièce qui assure la rotation 1/1 du coude intègre le Troisième servomoteur.
Poignet
La pièce constituant le poignet intègre un éventuel cinquième servomoteur dont la présence dépendra du design final du préhenseur.
Préhenseur
La conception du préhenseur reste à faire. L’objectif est de concevoir ( ou d’utiliser un concept existant ) un préhenseur capable de de s’équiper de différents outils spécialisés.
Calcul de masse
Le calcul de la masse maximale de chacune des composantes mécaniques du bras ; épaule, bras, avant-bras, permet de sélectionner le matériau adéquat pour la fabrication de ces pièces et de les dimensionner plus précisément ; épaisseur, densité …
Configurations de calcul
Configuration n°1 :
Cette première configuration présente des conditions favorables de ce calcul : Le bras à l’horizontal et l’avant bras vertical. Le poids équivalent aux poids de ces deux pièces (P) s’exerce à une distance restreinte du point de rotation. Par conséquent, le couple exercé par le moteur de l’épaule est plus faible que dans la deuxième configuration.
Configuration n°2 :
Cette configuration présente des conditions défavorables de ce calcul : le bras et l’avant bras sont tendus à l’horizontale. Le poids équivalent aux poids des deux pièces, s’exerce à une distance plus grande que dans la première configuration. Par conséquent, le couple exercé par le moteur de l’épaule est plus important.
Remarque : Même si la deuxième configuration reste improbable compte tenu de l’implantation des bras robotiques dans le diorama, elle permet une estimation des valeurs limites.
Données et approximations pour ce calcul
Le bras et l’avant-bras du bras robotique ont la même longueur (L = 15 cm). Le bras et l’avant-bras du bras robotique ont la même masse (m) répartie de manière homogène. La masse du poignet ( et du préhenseur ) sont négligées.
Caractéristiques techniques d’un servomoteur
Le site affiche un couple sous 4,8V de 1kg/cm (voir extrait). L’unité utilisée n’est pas conforme avec celle d’un couple qui devrait être 1kg.cm. Nous utiliserons cette valeur pour la suite des calculs.
Calculs
Configurations 1 :
C = L/2 x m + L x m C = (L/2 + L) x m C = 3/2L x m m = C / 3/2L m = 1 / (3/2×15) m = 44g
Configuration 2 :
C = L/2 x m + 3/2L x m C = (L/2 + 3/2L) x m C = 2L x m m = C / 2L m = 1 / (2×15) m = 33g