À la suite du premier article sur la version initiale de l’électronique du pont élévateur, celui-ci présente les principales évolutions techniques mises en œuvre.… Lire la suite →
Le premier prototype du système électronique destiné à la commande des quatre moteurs du pont élévateur du diorama pédagogique de la Batcave a mis en évidence plusieurs dysfonctionnements. Ceux-ci résultent principalement d’un choix de composants inadapté lors de la phase de conception, notamment au regard des performances attendues du système. Plus précisément, le prototype a révélé les limites techniques des quatre convertisseurs fréquence-tension utilisés comme interface entre les plateformes moteurs et la console de commande.
Les moteurs fonctionnant à des fréquences inférieures à 500 Hz, les convertisseurs délivrent des tensions de sortie présentant des variations inférieures à 50 mV. L’acquisition, la transmission et le traitement de ces signaux de très faible amplitude induisent un taux d’incertitude trop élevé pour garantir un fonctionnement suffisamment fiable et prévenir les risques de blocage du pont élévateur.
L’objectif principal de ce nouveau prototype est de valider le principe des modifications proposées à la conception initiale. Celles-ci reposent notamment sur le remplacement des quatre modules de conversion fréquence-tension par une carte à microcontrôleur de type Arduino.
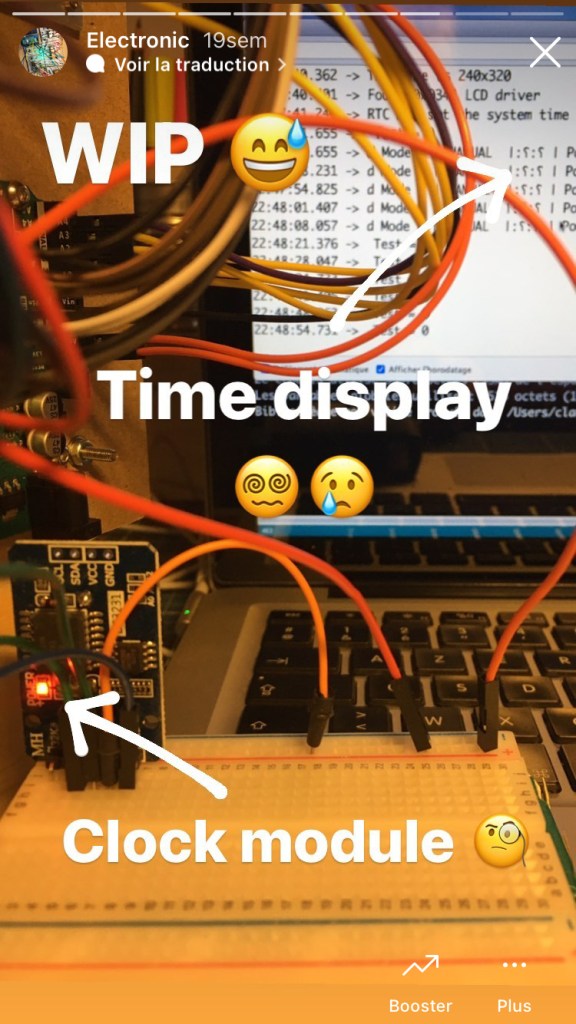
Un second objectif consiste à évaluer l’intégration d’un écran LCD I2C associé au microcontrôleur, permettant l’affichage local des vitesses de rotation des moteurs ainsi que leur traitement au plus près des plateformes. Cette amélioration, non envisagée dans la conception initiale, a émergé lors de l’utilisation de la plateforme TinkerCAD, au cours de la simulation du remplacement des modules de conversion par un Arduino.
Un troisième objectif vise à valider un nouveau mode d’échange d’informations entre l’armoire électrique d’acquisition des signaux issus des capteurs optiques et la console de commande. Le premier prototype reposait sur la transmission de quatre signaux analogiques correspondant aux tensions en sortie des convertisseurs. L’intégration d’un microcontrôleur dans l’armoire électrique permet désormais d’envisager une communication plus fiable via les ports série (Rx/Tx). Le traitement des signaux est ainsi déporté vers ce microcontrôleur, libérant celui de la console de commande, qui est alors exclusivement dédié à la mise à jour de l’affichage sur l’écran TFT 2,8″.
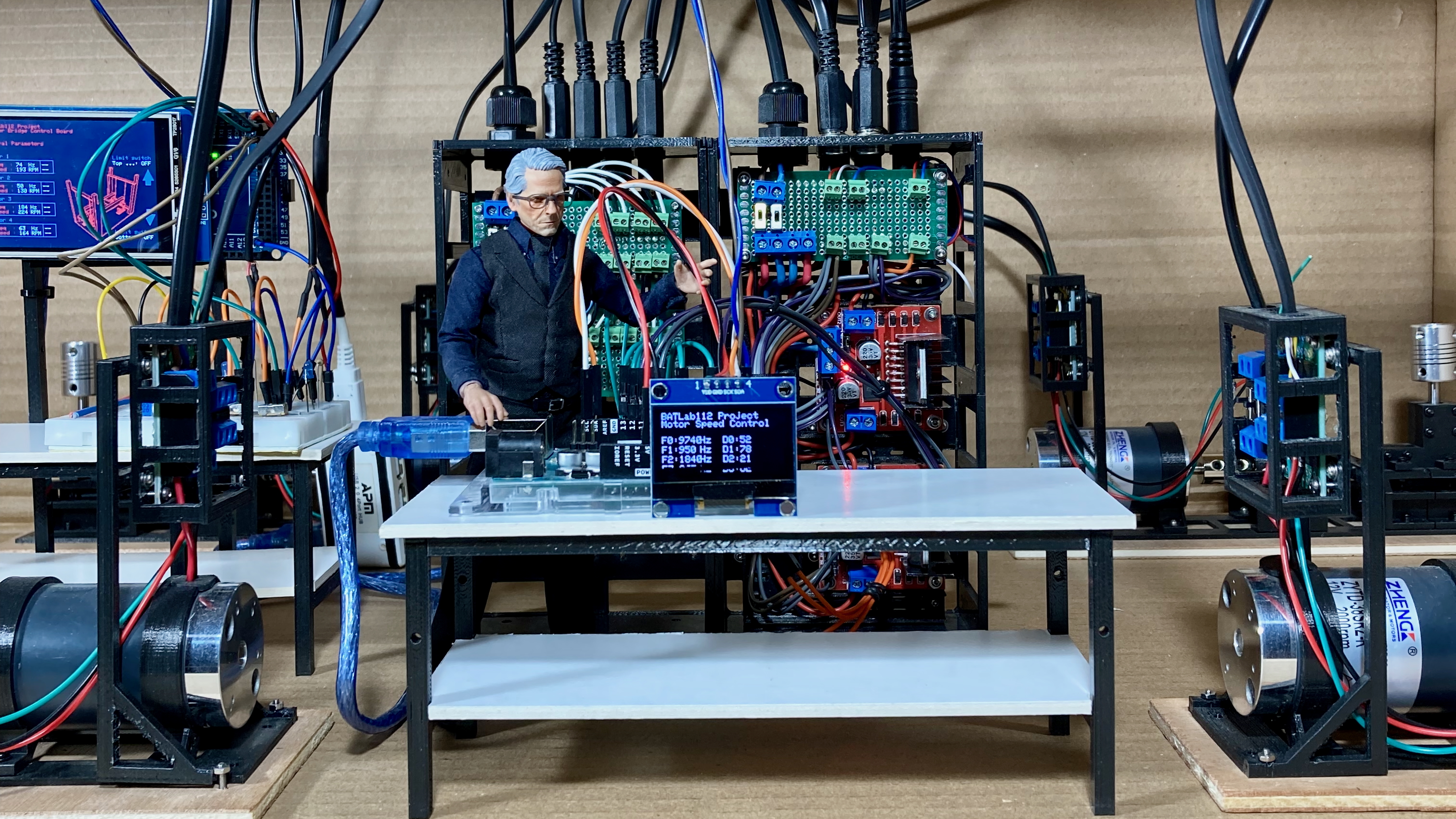
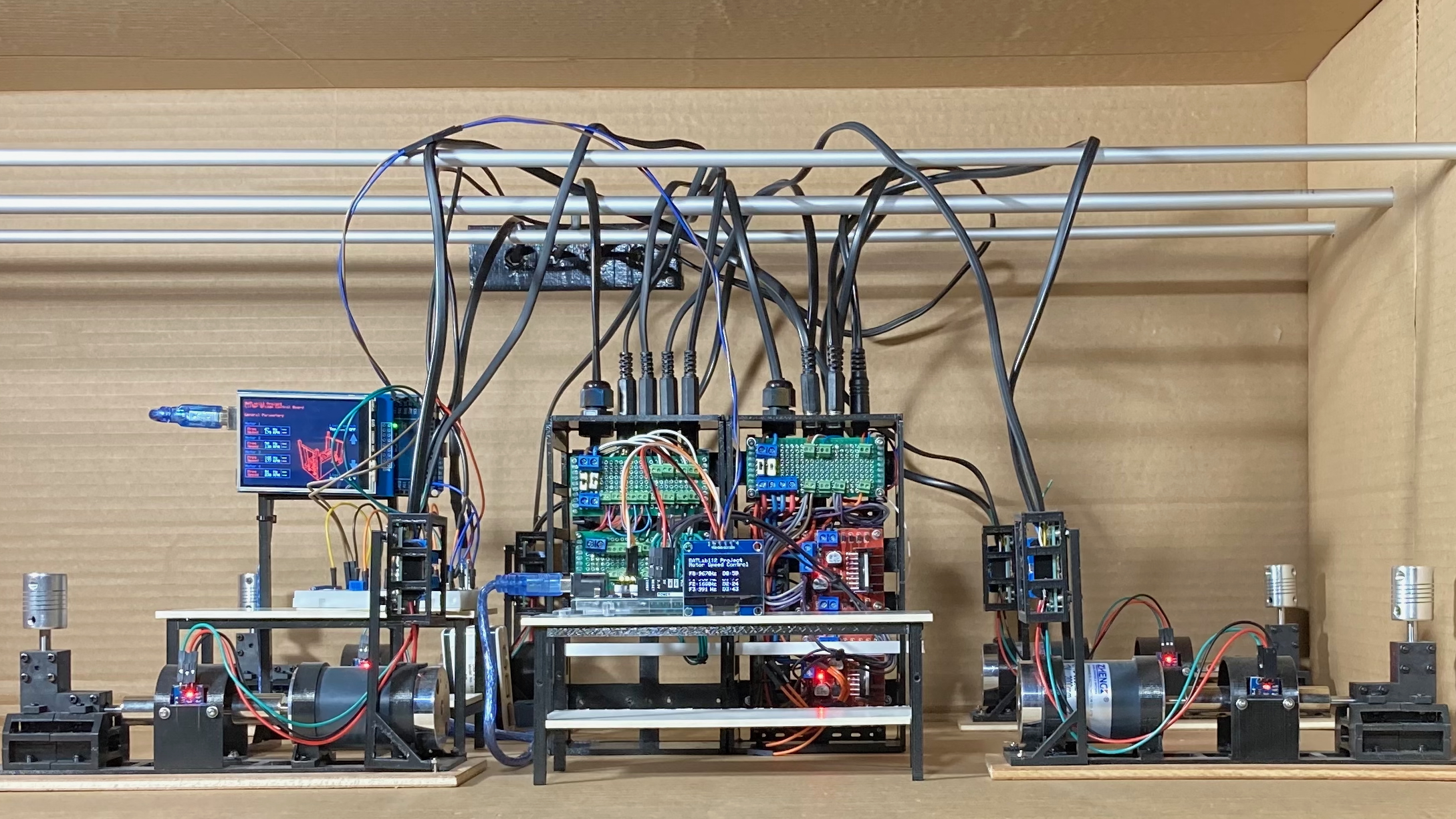
Comme indiqué dans la conclusion de l’analyse du premier prototype, l’architecture générale du système électronique a été globalement reconduite. Le dispositif comprend ainsi les quatre plateformes moteurs assurant l’entraînement des axes du pont élévateur, connectées à deux armoires électriques distinctes :
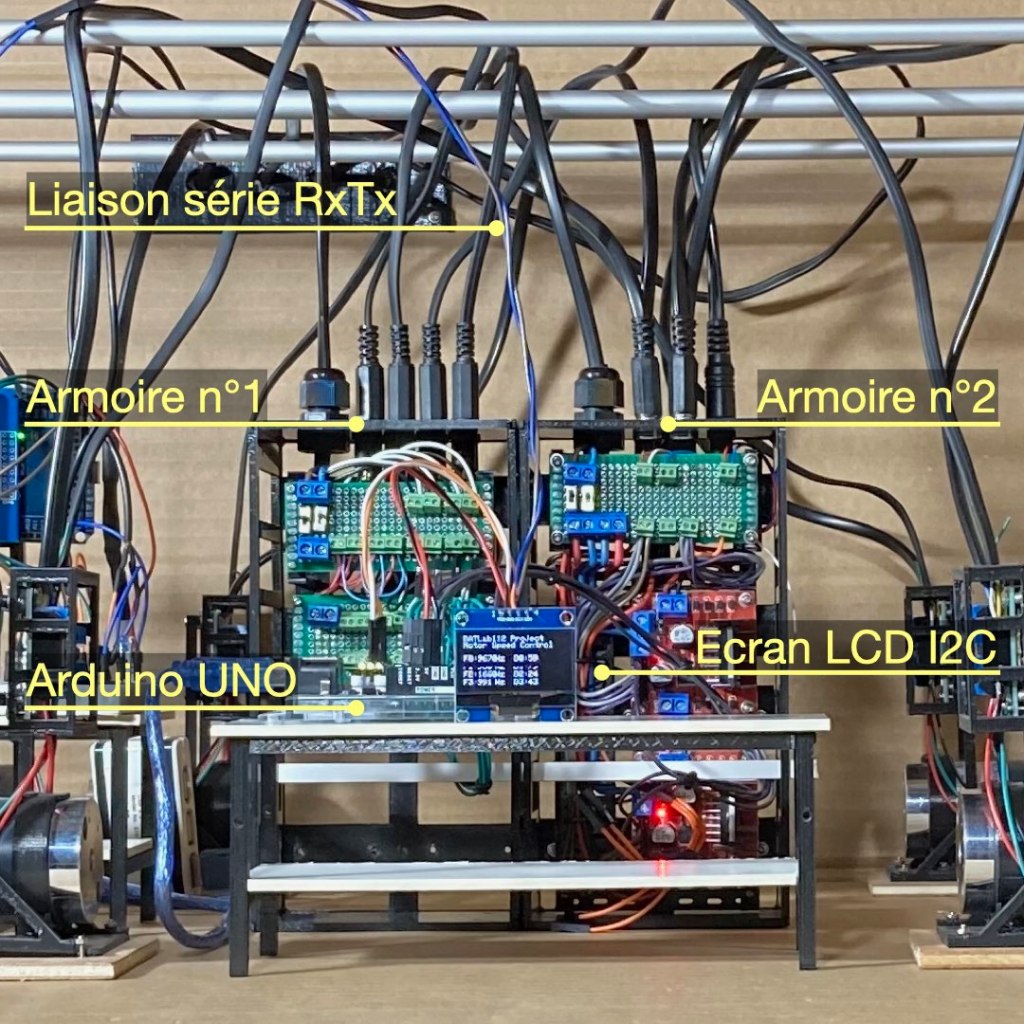
une armoire [1] dédiée à l’acquisition et au traitement des signaux en fréquence issus des capteurs optiques des plateformes ;
une armoire [2] destinée à la commande du sens et de la vitesse de rotation des moteurs.
Dans le cadre de ce nouveau prototype, un microcontrôleur Arduino UNO R3, déjà disponible dans le stock du projet BATLab112, a été retenu pour remplacer les quatre modules de conversion. Ce choix, fondé sur une démarche de rationalisation des coûts, demeure provisoire et pourra évoluer au cours des phases ultérieures du projet.
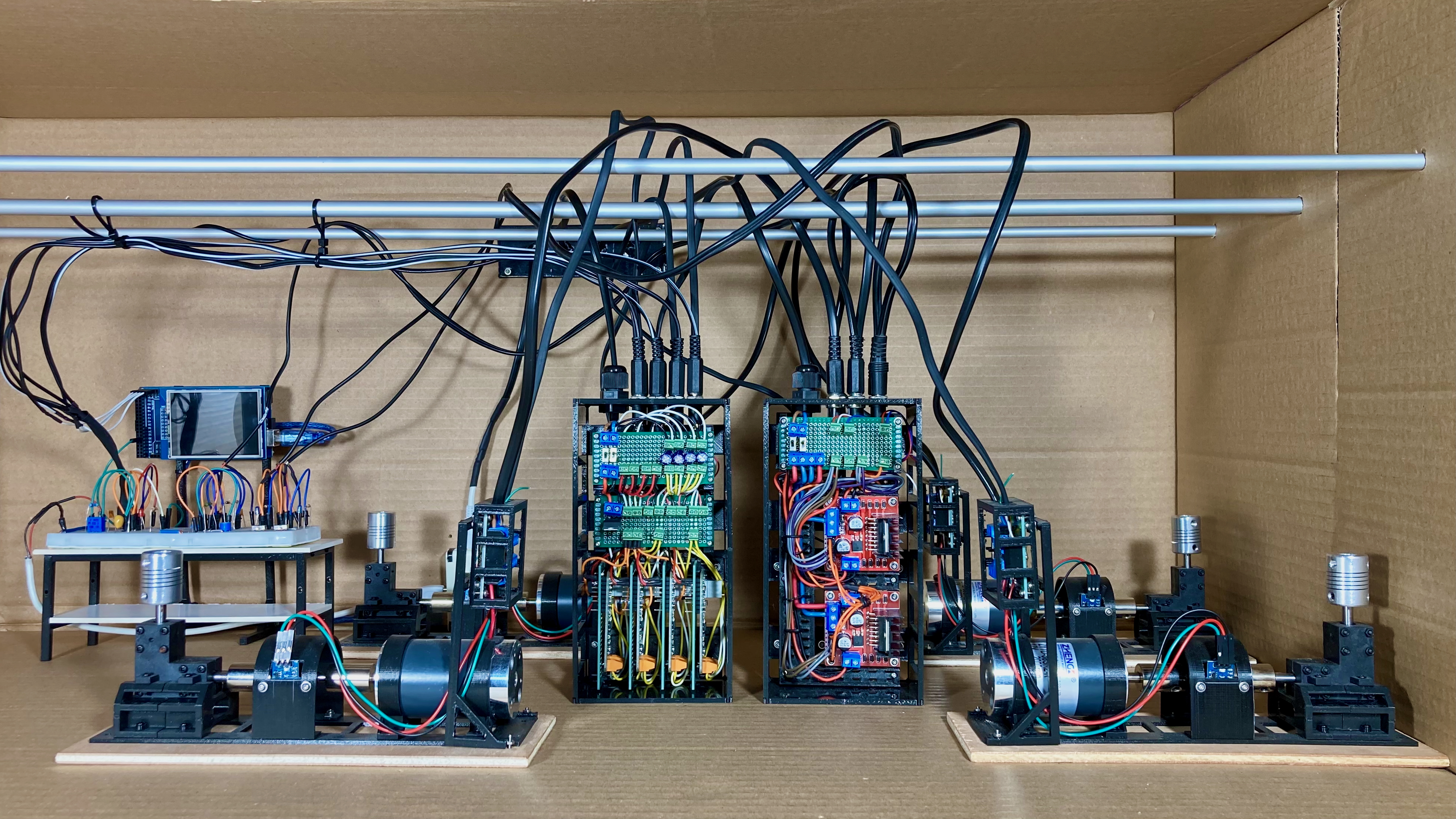
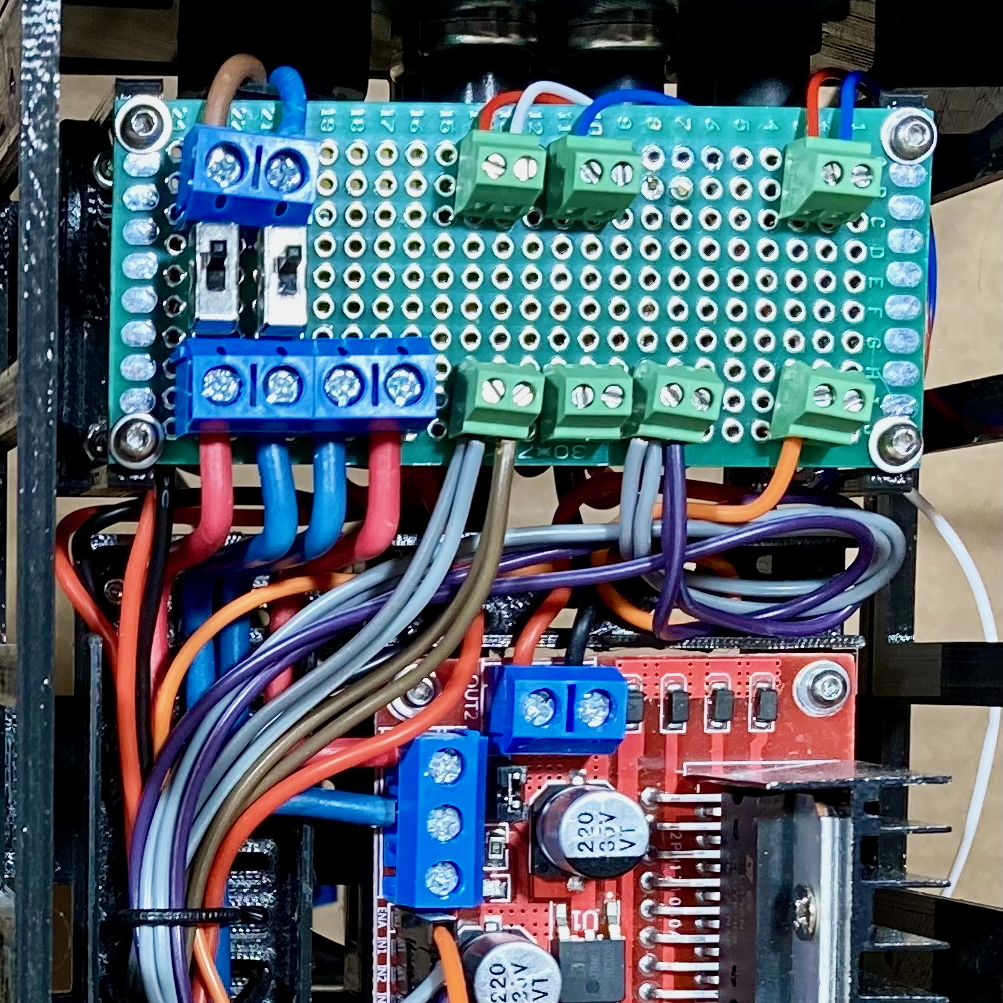
Implantation des nouveaux éléments
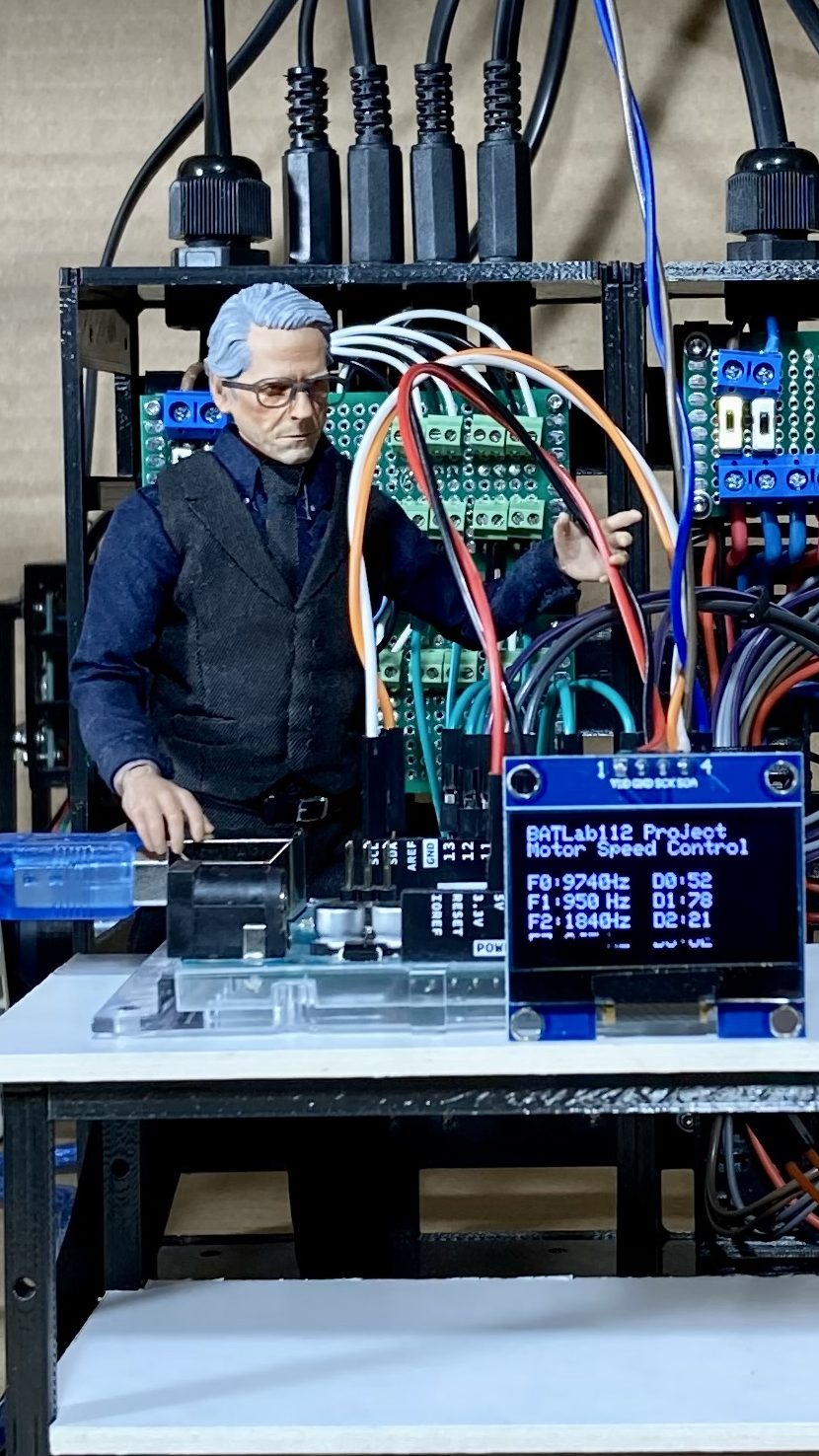
Le microcontrôleur Arduino Uno est installé à plat devant les armoires électriques.
L’écran LCD i2C est positionné de face, à proximité.
La liaison de transmission série entre les microcontrôleurs est assurée par le câble bleu et blanc.
Les quatre câbles transmettant les signaux en tension des convertisseurs vers la console de commande ont été supprimés : l’Arduino Uno est désormais connecté, via l’armoire n°1, directement aux sorties des capteurs optiques des plateformes moteurs.
Le câble transmettant la commande de vitesse entre la console et l’armoire n°2 a été retiré. L’Arduino Uno fournit désormais quatre signaux à rapport cyclique réglable, permettant de piloter indépendamment la vitesse de rotation de chaque moteur.
Conclusions
La conclusion de l’article consacré au premier prototype soulignait deux axes principaux d’amélioration :
Le remplacement des convertisseurs fréquence-tension par un microcontrôleur Arduino
L’amélioration de l’esthétique et de la robustesse des PCB des borniers des armoires électriques.
Le présent travail confirme la validité du principe de remplacement des convertisseurs par un microcontrôleur. Il reste toutefois à déterminer le modèle Arduino le plus adapté pour une intégration définitive au sein de l’armoire électrique d’acquisition et de traitement des signaux issus des capteurs optiques des plateformes moteurs. Un premier état des lieux indique que l’usage de modules Arduino Nano serait pertinent, leurs dimensions et caractéristiques répondant aux contraintes d’intégration et de performance. Leur déploiement sera effectué lors de la révision de l’implantation interne des armoires électriques.
Enfin, la refonte des PCB des borniers des deux armoires électriques sera également réalisée au cours de cette même phase de réaménagement interne.trique sera aussi mise en oeuvre lors de la reprise de l’implantation interne de ces deux armoires.
Suite à la réalisation du premier prototype opérationnel, cet article présente la reprise de la conception de l’électronique de commande du pont élévateur, du diorama de la Batcave du projet BATLab112.
Cet article fait suite à la conception détaillée de l’électronique de commande et la réalisation d’un premier prototype opérationnel de l’électronique de commande du pont élévateur du diorama pédagogique à l’échelle 1/12 de la Batcave du projet BATLab112.
Les essais effectués à l’aide du montage prototype ont mis en évidence que les modules de conversion des signaux de fréquence, issus des capteurs optiques des plateformes moteurs, en signaux de tension exploitables par la carte Arduino Mega intégrée à la console de commande du pont élévateur, ne sont pas adaptés. En effet, la conversion de signaux de fréquence trop faibles génère des tensions dont les variations en amplitude, corrélées à la fréquence, sont insuffisantes pour permettre une interprétation fiable et précise par le microcontrôleur.
L’objet de cet article est double. Il s’agit, dans un premier temps, de proposer une nouvelle conception de l’électronique de commande, en remplaçant les modules de conversion fréquence/tension par des cartes Arduino, capables d’assurer directement la lecture, le traitement et la transmission des signaux issus des capteurs optiques. Dans un second temps, l’objectif est d’introduire plusieurs améliorations fonctionnelles absentes de la première version du système, notamment la mise en place d’une régulation de vitesse pour chacun des quatre moteurs assurant l’entraînement des axes du pont élévateur. Cette évolution vise à garantir un mouvement synchronisé et sécurisé de l’ensemble des plateformes, tout en offrant une meilleure stabilité et une précision accrue lors des phases de montée et de descente.
Les éléments conservés depuis la version initiale
Dans une volonté de minimiser l’impact des modifications envisagées, tant en termes de temps que de coût, certains éléments existants doivent être conservés. Cette approche vise à réutiliser au maximum les composants et sous-ensembles déjà en place, afin de limiter les interventions matérielles et de garantir la compatibilité avec l’infrastructure électrique actuelle du projet.
Les armoires électriques
L’implantation de cette électronique au sein des deux armoires électriques est conservée. Les dimensions mécaniques de ces armoires demeurent inchangées, afin de maintenir la cohérence avec les autres ensembles électriques similaires du projet.
La conception de l’agencement de l’armoire dédiée au contrôle de la vitesse et du sens de rotation des moteurs n’est que marginalement affectée par le changement de procédé de mesure de la vitesse. Cependant, l’analyse du fonctionnement du prototype a mis en évidence la nécessité d’une évolution majeure : le système doit désormais permettre de piloter la vitesse de rotation de chacun des moteurs de manière indépendante. Cette modification ouvre la voie à une régulation plus fine du mouvement de chaque axe du pont élévateur, garantissant un meilleur équilibrage et une synchronisation plus précise de l’ensemble.
Dans le montage initial, le signal issu du générateur à rapport cyclique variable, conçu à partir d’un oscillateur NE555, produit un signal carré unique distribué simultanément vers les quatre entrées des deux doubles ponts en H assurant le pilotage des moteurs. Cependant, ce dispositif, entièrement autonome et dépourvu de rétroaction, ne permet aucune régulation dynamique du rapport cyclique en fonction des variations de vitesse propres à chacun des moteurs. En conséquence, toute fluctuation mécanique ou électrique affectant un moteur se répercute sur l’équilibre global du système, sans possibilité de correction différenciée.
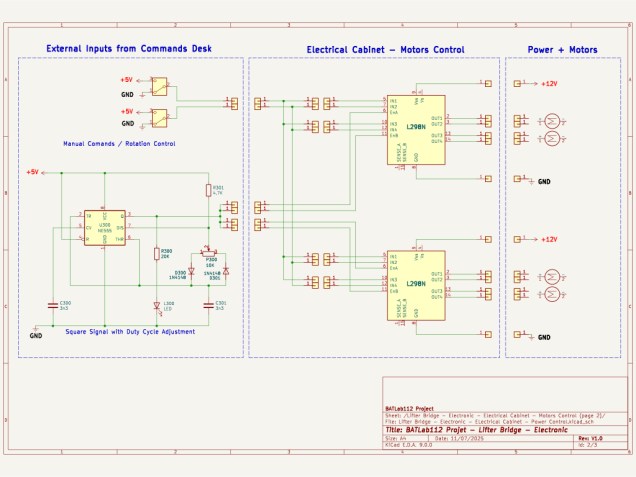
Schéma électronique
La reprise de cette conception électronique a également constitué l’occasion d’utiliser, pour la première fois dans l’avancement du projet BATLab112, l’outil en ligne TinkerCAD, dédié à la conception et à la simulation de circuits électroniques. Cet environnement virtuel a permis de modéliser les nouveaux schémas de commande avant leur réalisation concrète, facilitant ainsi les phases de test, de validation et d’ajustement. L’usage de TinkerCAD a également contribué à limiter les erreurs de conception, qui se sont déjà avérées coûteuses en temps et en ressources matérielles, en permettant d’anticiper les incompatibilités potentielles entre composants et de valider les principes de fonctionnement avant toute phase de prototypage physique.
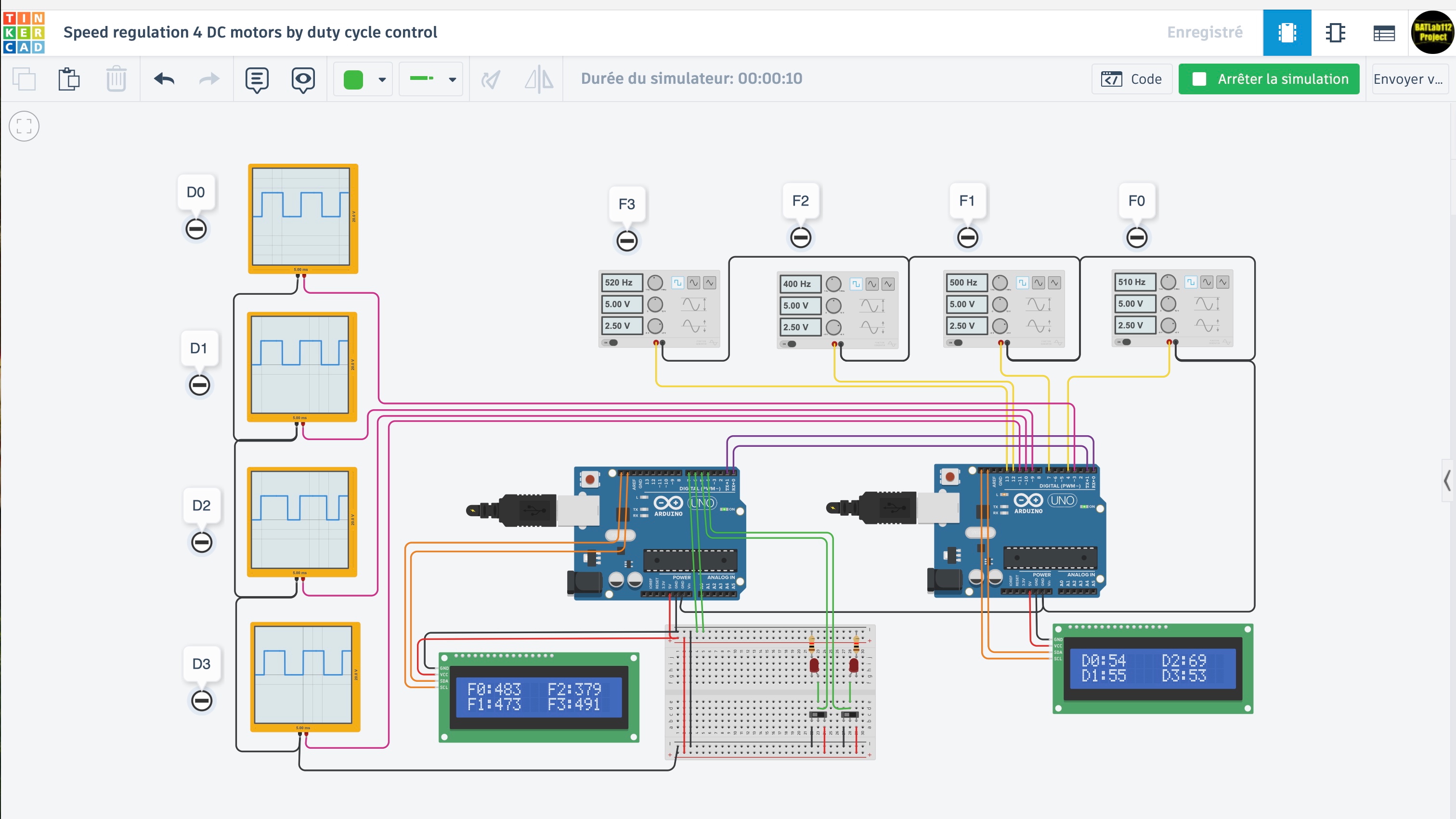
Au centre de ce schéma, les deux cartes Arduino Uno jouent un rôle de représentation :
celle située à gauche symbolise la carte Arduino Mega 2650 utilisée dans la console de commande ;
celle située à droite correspond à la nouvelle carte Arduino intégrée au montage, dédiée à l’acquisition et au traitement des signaux électriques provenant des capteurs optiques de mesure des vitesses de rotation des moteurs.
Dans cette simulation, l’écran TFT 2,8″ associé à la carte Mega a dû être remplacé par un écran LCD I2C 16×2, en raison des limitations de la bibliothèque de composants disponibles dans TinkerCAD. Toutefois, ce remplacement s’est révélé être une opportunité technique : il a permis d’envisager une solution d’affichage local, directement au plus près des armoires de raccordement électriques. Les faibles dimensions et la simplicité de câblage de ces écrans LCD offrent de nouvelles perspectives d’intégration, notamment sur la porte même des armoires électriques.
La platine de prototypage électronique présente sur le schéma remplit quant à elle un rôle symbolique, représentant la console de commande physique du dispositif.
Enfin, les quatre générateurs de fonctions simulent les signaux issus des capteurs optiques placés sur les plateformes moteurs. Ces générateurs, réglables individuellement, sont associés à quatre oscillogrammes permettant d’observer les rapports cycliques et les signaux de commande de vitesse de rotation produits par la carte Arduino. Cette configuration a notamment permis de valider expérimentalement la régulation de vitesse des moteurs dans un environnement virtuel.
Évolution depuis la version initiale
Mesure de la vitesse de rotation des moteurs
La mesure de la vitesse de rotation des moteurs est la fonction la plus impactée par les évolutions de cette nouvelle conception. Jusqu’à présent, cette mesure était assurée par des modules de conversion fréquence/tension, qui se sont révélés inadaptés aux conditions réelles de fonctionnement et aux niveaux de signaux fournis par les capteurs.
Comme évoqué précédemment, l’objectif consiste à remplacer ces modules par une ou plusieurs cartes Arduino, chargées d’assurer l’acquisition, le traitement et la conversion des signaux de fréquence issus des capteurs optiques positionnés sur les quatre plateformes moteurs.
L’utilisation de l’outil de simulation TinkerCAD joue ici un rôle essentiel : elle permet d’expérimenter différentes configurations pour déterminer le nombre de cartes Arduino nécessaires à la gestion simultanée des signaux, ainsi que le modèle le plus approprié. Ce choix dépendra à la fois des capacités d’entrée/sortie disponibles et des contraintes d’encombrement mécanique, afin de garantir une intégration optimale en remplacement direct des anciens modules de conversion.
Edition des schémas électroniques
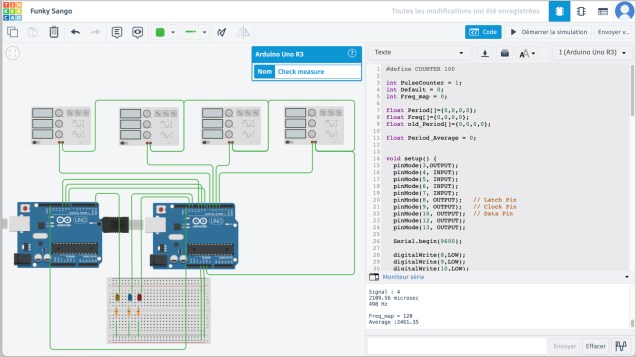
La simulation du montage électronique du diorama de la Batcave du projet BATLab112 est éditée avec l’application Web TinkerCAD.
Script d’acquisition et traitement des signaux de vitesse moteur
/**************************************************************/ /* Script for Arduino Check Measure */ /* Measures and converts the frequency values from the */ /* generators to transmit them to the second Arduino */ /**************************************************************/ #include <LiquidCrystal_I2C.h>
/**************************************************************/ /* Function : ReadPeriod() */ /* Input : The signal number of the measured period */ /* Return : none */ /* Digest : Use the Arduino pulseIn command to measure */ /* the signal period in microseconds */ /**************************************************************/ float ReadPeriod(int signal) { int pin = 0; float VarPeriod = 0; PulseCounter = 0; while(PulseCounter <= COUNTER) { VarPeriod = (VarPeriod + pulseIn(signal,HIGH)); VarPeriod = (VarPeriod + pulseIn(signal,LOW)); PulseCounter++; } VarPeriod = VarPeriod / PulseCounter; return VarPeriod; }
Limite de fonctionnement du script
Régulation de la vitesse de rotation des moteurs
Le modèle de la bibliothèque TinkerCAD de moteur à courant continu équipé d’un encodeur ne permet, à priori, pas de simuler le fonctionnement réel de l’encodeur. Cette limitation a directement conduit à adopter une approche simplifiée pour la régulation de la vitesse des moteurs. En l’absence de signaux de retour exploitables, la régulation du rapport cyclique du signal PWM de pilotage reste très rudimentaire dans cette première version du script.
À partir d’une configuration initiale des rapports cycliques fixée à 70 % :
#define DUTY_CYCLE_INIT 70
La plus petite valeur parmi les quatre vitesses de rotation simulées est utilisée comme référence pour ajuster les rapports cycliques des trois autres moteurs. Cette méthode, bien que cohérente dans le cadre des contraintes de la simulation, ne constitue pas une véritable régulation en boucle fermée : elle repose uniquement sur une logique de comparaison relative, sans mesure réelle de la vitesse issue d’un encodeur.
De plus, les délais d’exécution du code et les latences propres à l’environnement de simulation TinkerCAD limitent la précision des ajustements et induisent un comportement parfois irrégulier. Ces approximations rendent difficile toute extrapolation directe du fonctionnement simulé vers un système physique réel.
Ainsi, le script doit être considéré avant tout comme une première approche conceptuelle de la régulation multi-moteurs. Il permet de valider les principes d’organisation du code — gestion des signaux PWM, comparaison des vitesses, et synchronisation relative — tout en offrant une base solide pour une future version du programme.
Ces lignes de script déclarées en commentaire correspondent à la mise en œuvre initiale de diviseurs de fréquence appliqués aux signaux PWM générés par les broches 3, 9, 10 et 11. L’objectif de cette modification était d’augmenter la fréquence de modulation, passant d’environ 490 Hz à des valeurs supérieures à 20 kHz, afin de rendre les signaux inaudibles pour l’oreille humaine. Cette approche avait été envisagée pour améliorer le confort sonore du système lors des phases de commande moteur. Cependant, elle a été finalement mise de côté, car l’augmentation de la fréquence PWM provoquait des dysfonctionnements dans la communication I2C utilisée par l’écran LCD, rendant son affichage inopérant. Une solution alternative, consistant à utiliser des bibliothèques spécialisées telles que PWM.h, sera étudiée ultérieurement afin d’obtenir un contrôle plus fin des fréquences de modulation sans interférer avec les autres périphériques du système.
Bienfaits des limites de TinkerCAD
Les limites rencontrées lors de l’utilisation de TinkerCAD apparaissent clairement dès la conception du schéma électronique, notamment en raison de l’absence de certains composants essentiels utilisés dans le cadre du projet BATLab112, tels que la carte Arduino Mega 2560 ou encore les écrans TFT 2,8″.
Cependant, loin de constituer un frein, ces contraintes se sont révélées particulièrement formatrices. Elles ont favorisé une approche plus inventive et une optimisation du travail de conception. En effet, cette première expérience d’utilisation de TinkerCAD a permis de démontrer qu’une seule carte Arduino Uno pouvait remplacer les quatre modules de conversion fréquence/tension initiaux, tout en assurant l’acquisition et le traitement des signaux issus des capteurs.
L’absence de certains composants dans l’environnement de simulation a également encouragé la recherche de solutions alternatives et l’amélioration des montages existants. Ainsi, la nécessité d’optimiser l’utilisation des broches disponibles sur l’Arduino Uno, en nombre plus limité que sur la Mega 2560, a conduit au développement de nouvelles stratégies de communication. Parmi celles-ci, la mise en place d’un échange de données par liaison série entre l’Arduino dédié à l’acquisition et au traitement des signaux de vitesse de rotation des moteurs, et l’Arduino de la console de commande responsable de l’affichage, constitue une évolution majeure. Cette approche a permis non seulement d’alléger le câblage, mais aussi d’améliorer la modularité et la clarté fonctionnelle du système.
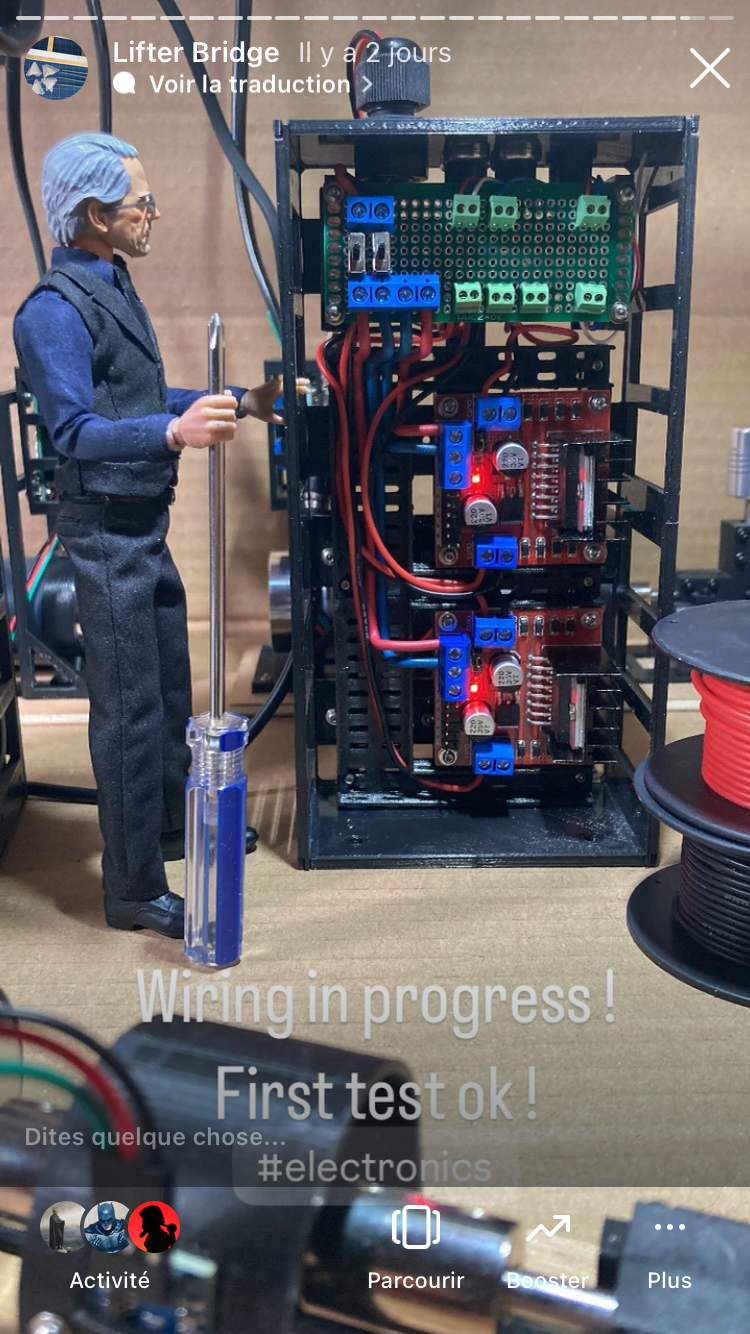
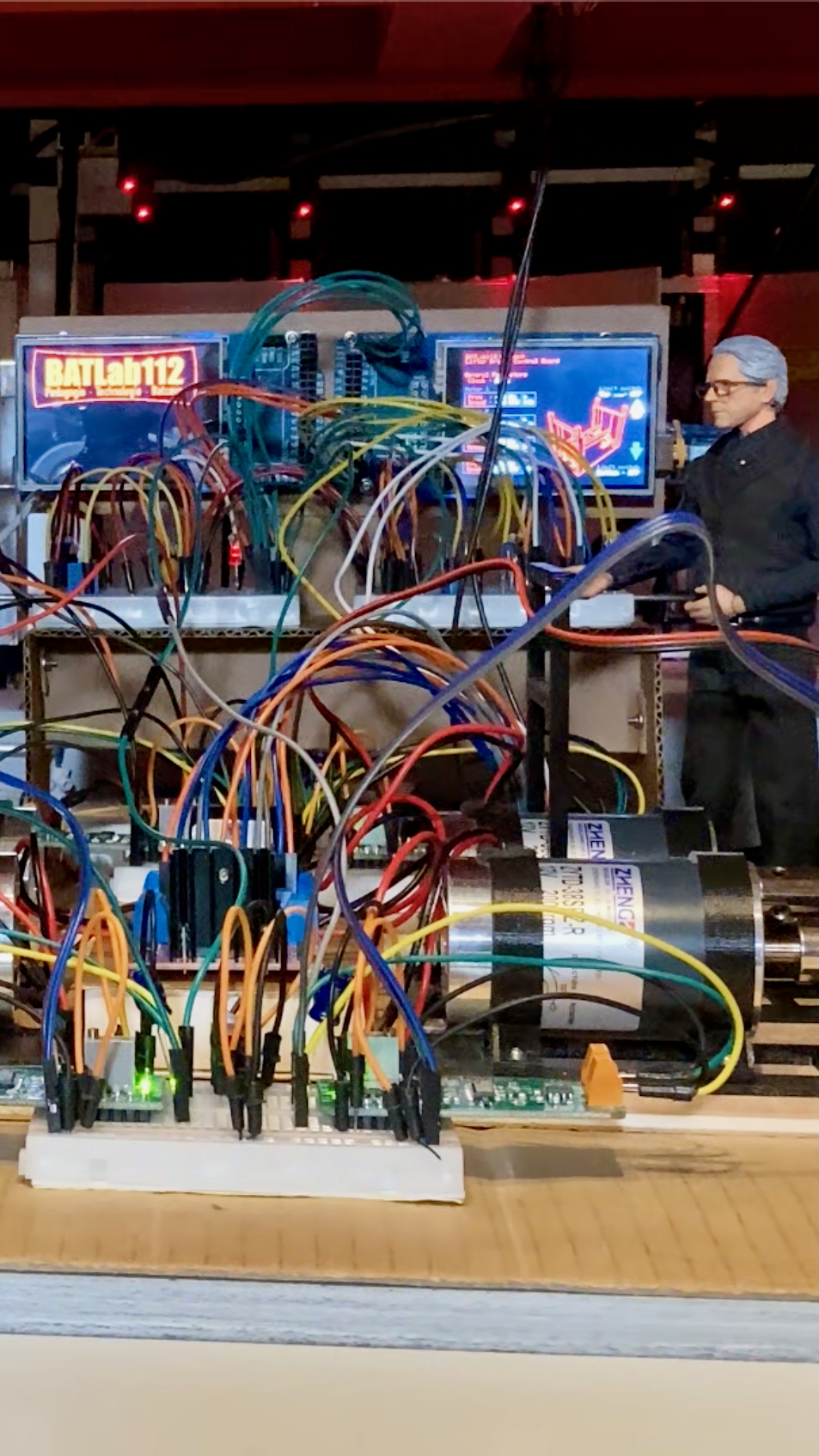
Prototypage de validation
Maquette de prototypage
Cette maquette de prototypage est destinée à valider le câblage ainsi que le fonctionnement de la carte Arduino dédiée à l’acquisition, au traitement et à la transmission des signaux de vitesse des quatre moteurs. Elle constitue une étape préalable essentielle avant l’intégration du système complet sur le prototype fonctionnel.
Adaptations par rapport au montage TinkerCAD
Dans cette version matérielle, les générateurs de fréquences utilisés dans le montage TinkerCAD sont remplacés par un clone d’Arduino Mega, chargé de délivrer quatre signaux PWM. Deux de ces signaux sont associés à un diviseur de fréquence, permettant d’alterner entre deux valeurs de fréquences distinctes afin de simuler différentes vitesses de rotation des moteurs.
La carte Arduino Uno couplée à un écran LCD, représentant la console de commande dans la simulation TinkerCAD, est remplacée par la carte Arduino Mega équipée d’un écran TFT 2,8″. Cet ensemble est directement issu de la console de commande réelle du système.
De son côté, l’écran LCD initialement utilisé sur la carte Arduino Uno en charge de la mesure, du traitement et de la transmission des informations, est désormais remplacé par un écran OLED I2C, plus compact et offrant une intégration dans l’armoire électrique.
Conclusion
Le fonctionnement général de cette maquette est validé. Les échanges entre les cartes, ainsi que la génération et la lecture des signaux de vitesse, se comportent conformément aux attentes. La prochaine étape consistera à intégrer ce montage dans les armoires électriques du prototype initial du système de commande, en liaison avec les plateformes moteurs, afin de procéder aux essais en conditions réelles.
Cet article présente le premier prototype de l’électronique de commande du pont élévateur du diorama de la Batcave du projet BATLab112.… Lire la suite →
Suite à la conception détaillée de l’électronique de commande du pont élévateur du diorama de la Batcave, l’objectif de ce prototype est de valider le principe de fonctionnement de cette électronique. Il s’agit dans un premier temps, de réaliser les prototypes des deux armoires électriques, contenant les montages électroniques de distribution de l’énergie électrique des moteurs et de mesures de leurs vitesses de rotation. Dans un deuxième temps, le câblage de ces armoires avec les plateformes moteurs et la console de commande, doit permettre de valider le fonctionnement global de ce système.
Ce prototype ne présente pas encore un niveau de finition abouti, compatible avec les ambitions de réalisme d’un diorama. La structure interne des deux armoires électriques principales est apparente, ainsi que celles des plateformes moteurs. Le câblage est très expérimentale et la console de commande est seulement simulée par un affichage sommaire sur un écran, même si des modèles opérationnels fonctionnent déjà pour la plateforme rotative et le pont roulant.
Implantation du prototype
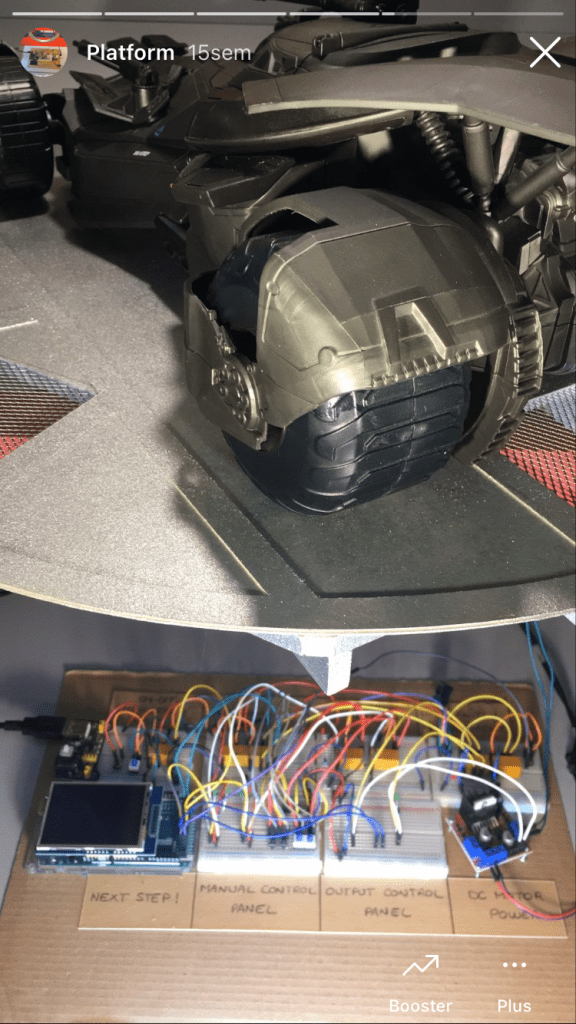
Initialement, ce prototype devait être mis en oeuvre en situation, au sein du diorama de la Batcave. L’intérêt premier était de bénéficier de la proximité du local électrique du diorama de la Batcave, pour alimenter en énergie électrique les différents sous-ensembles électroniques ; moteurs, armoires électriques … Le deuxième intérêt était de disposer de l’environnement opérationnel du diorama de la Batcave comme décor, dans les publications sur les réseaux sociaux faites sur l’avancement du projet.
Finalement, le prototype de ce système électronique est réalisé à part du diorama de la Batcave. La manipulation des différents composants électriques et mécaniques est ainsi rendue plus aisée lors des différentes modifications opérées pendant la mise au point. Sa mise en oeuvre dans une enceinte en carton a notamment permis d’améliorer la gestion du câblage grâce aux tubes en aluminium, sans pour autant avoir eu besoin de concevoir et de fabriquer une structure mécanique spécifiques.
Cette enceinte en carton a aussi servi d’arrière plan dans les mises en scène des publications sur les réseaux sociaux, présentant l’avancement de ce système.
Cette vidéo présente les différents éléments physiques de ce système électronique. Chaque élément est une reproduction à l’échelle 1/12 d’éléments réels d’un système électromécanique capable d’actionner les quatre axes d’un pont élévateur, pour une charge équivalente à celle de la Batmobile réelle d’une masse d’environ 4 tonnes. Cependant, une reproduction de l’aspect visuel et du fonctionnement d’origine de ces éléments électromécaniques réels n’est pas envisageable à cause des contraintes techniques induites par l’utilisation de technologies électroniques. Pour autant, l’architecture de ce système à l’échelle 1/12, le profil de chaque élément ainsi que leurs modes de fonctionnement restent très réaliste.
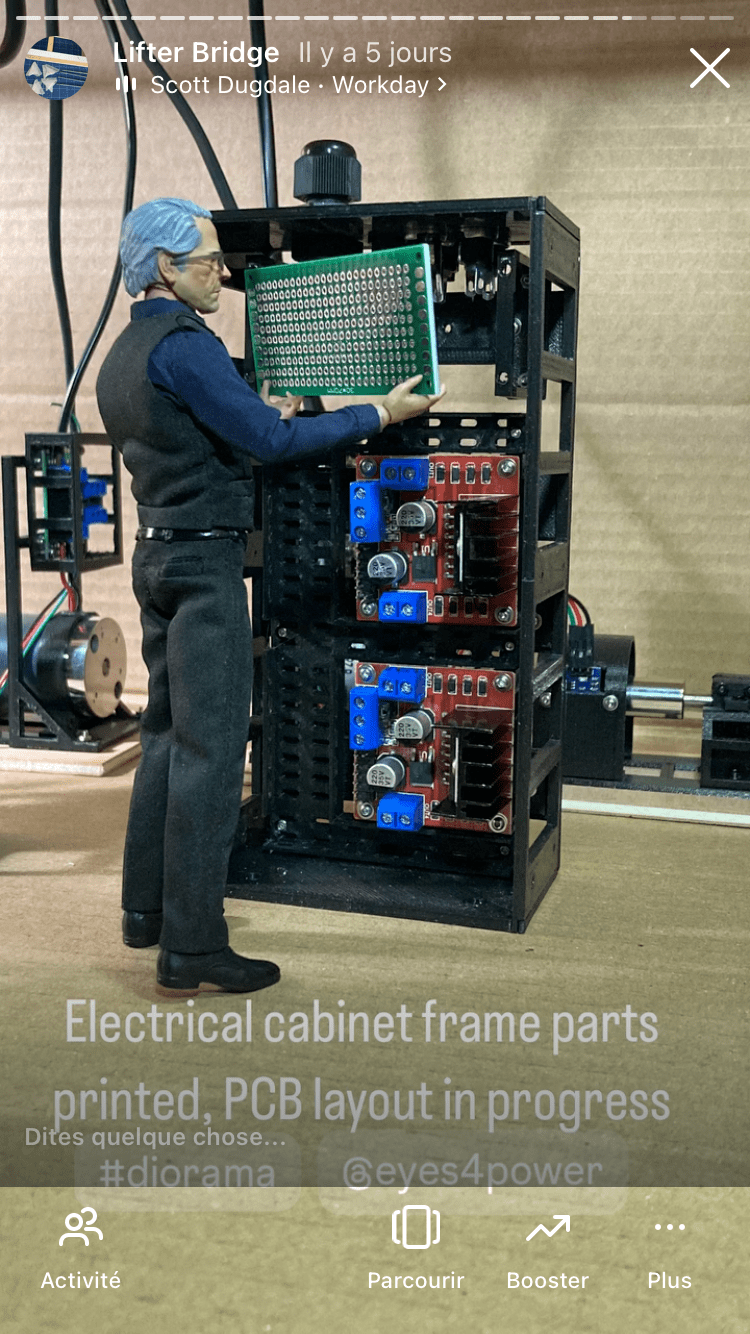
L’armoire électrique de gauche contient l’électronique de mesure de la fréquence de rotation des 4 moteurs, dont 4 cartes PCB manufacturées convertisseur de fréquence en tension. L’armoire électrique de droite contient l’électronique de distribution de l’énergie électrique vers les 4 moteurs, dont 2 cartes PCB manufacturées d’un double Pont en H. Les structures de ces deux armoires électriques sont toutes les deux identiques aux modèles opérationnels développés pour le poste électrique du diorama. Elles sont fabriquées par impression 3D ainsi que tous les supports internes de PCB et les chemin de câbles.
Cet article présente le premier modèle opérationnel du local électrique à l’échelle…
Les plateformes moteurs
Photo extrait n°002
Les prototypes de 4 plateformes moteurs d’entrainement des 4 axes verticaux du pont élévateur ont été précédemment réalisés et testés mécaniquement et électriquement, mais sans être couplés avec les axes du pont élévateurs.
Cet article présente le premier prototype des plateformes de motorisation des axes du pont…
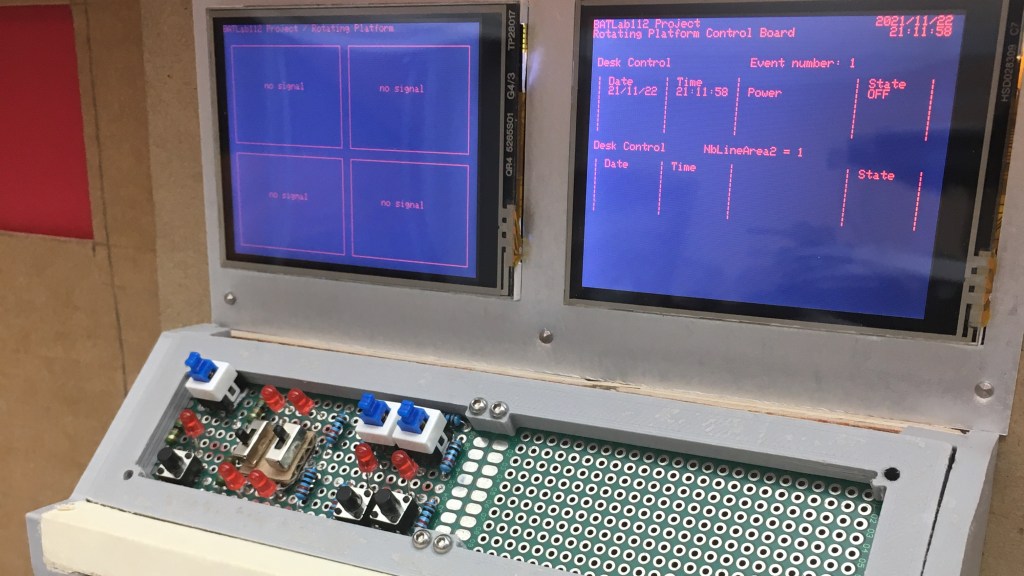
La console de commandes
Photo extrait n°003
La console de commande est réduite à une simple maquette électronique et d’une carte Arduino Mega, équipée d’un écran 2,8″. La partie gauche de la plaque de prototypage supporte le montage électronique d’un générateur de signal carré, cadencé à une fréquence de 2Hz, servant de signal d’horloge pour l’échantillonnage des mesures et de leurs affichages. La partie de droite, supporte deux switches pour piloter le sens de rotation des moteurs, ainsi que le montage électronique d’un générateur de signal carré, dont la variation du rapport cyclique commande la variation de vitesse de rotation.
Ce premier modèle opérationnel de la console de commande permettant de piloter les équipements…
Le câblage
Photo extrait n°004
Le câblage est très expérimentale. Il n’a fait l’objet d’aucune conception en amont. Le câblage est réalisé à partir de câbles électriques issus de récupération, équipés de connecteurs de type Jack Audio 3,5 mm. L’aspect expérimentale se justifie par le fait qu’il est toujours difficile d’anticiper le volume occupé par les câbles particulièrement en interne des armoires. Modéliser ce câblage lors de la phase de conception serait très chronophage. De plus, la modélisation du câblage aurait imposée de modéliser la structure supportant le câblage, ce qui aurait encore ajouter à l’aspect chronophage de cette tâche.
Cet article présente le premier modèle opérationnel du local électrique à l’échelle 1/12 du…
Fonctionnement général
La vidéo présente le principe de fonctionnement général de ce système électronique. Elle met en évidence la commande du sens de rotation des 4 moteurs, par l’intermédiaire de la combinaison des deux switches de la console de commande, ainsi que des PCB des doubles Ponts en H installés dans l’armoire électrique de contrôle de l’alimentation électrique des moteurs. La vidéo présente aussi la relation entre le rapport cyclique du signal carré issu de la console de commandes et la vitesse de rotation des moteurs.
Vue d’ensemble du prototype en fonctionnement
Analyse critique du résultat obtenu
Le fonctionnement général du système électronique, de commandes et de mesures de la fréquence de rotation des moteurs du pont élévateur, tel qu’il a été conçu, est opérationnel. Cependant, il reste des points d’amélioration importants tant sur le plan fonctionnel que sur le plan esthétique.
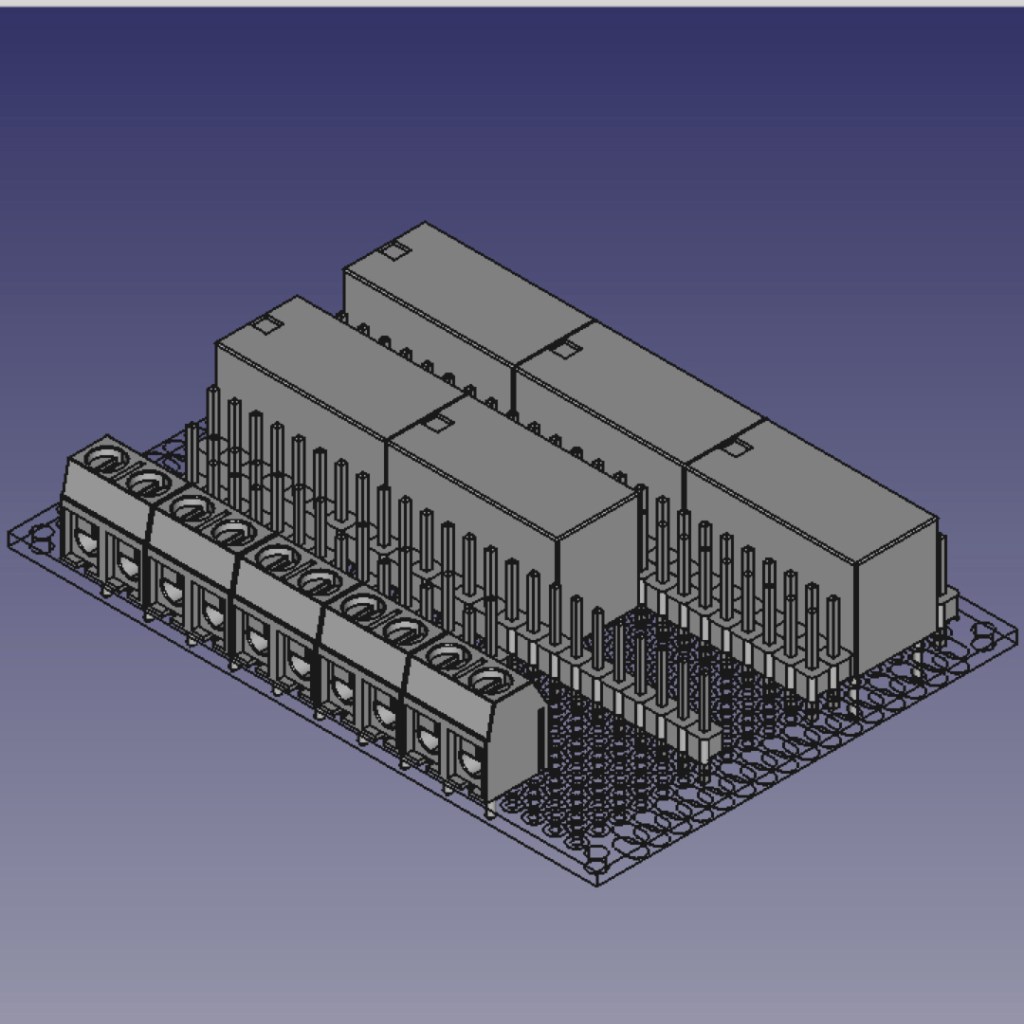
Esthétique finale des connecteurs des PCB
Photo extrait n°005
Sur le plan esthétique, au-delà de l’absence d’habillage des armoires électriques qui fera l’objet d’une mise en oeuvre ultérieure, les PCB supportant les fonctions de bornier de raccordement dans les deux armoires électriques, ainsi que le câblage interne de l’armoire électrique de mesure, présentes des stigmates de leur manipulation intensive lors de la phase de mise ou point. Ces PCB utilisent des connecteurs de petite taille, ne leur permettant pas de proposer un boitier mécanique suffisamment robuste pour encaisser les torsions induites par l’action des tournevis sur les vis.
Ce type d’inconvénient a déjà été rencontrés pour les connecteurs des PCB contenus dans les armoires de raccordement électrique des plateformes moteurs. Des pièces fabriquées par impression 3D ont alors permis de solidariser plusieurs connecteurs entre eux, améliorant ainsi leur rigidité mais aussi leur esthétique générale pour tendre vers un rendu plus réaliste.
Esthétique finale du câblage interne des armoires électriques
Photo extrait n°006
Si l’aspect du câblage externe des armoires électriques parait si anarchique (voir Photo extrait n°004), c’est la conséquence directe d’une part d’une absence préalable de conception et d’autre part d’une démarche expérimentale dans sa mise en oeuvre afin de tester différents types de connecteurs.
Par contre l’encombrement du câblage interne des armoires électriques a visiblement était sous dimensionné dans la phase de conception. Ce défaut est amplifié par un sous dimensionnement de la fonction de bornier des PCB spécifiquement conçus pour cela.
Sur le plan fonctionnel, ce prototype permet de mettre en évidence les limites techniques des quatre convertisseurs de fréquences en tension, utilisé dans l’armoire électrique n°1, pour servir d’interface entre les plateformes moteurs et la console de commandes. Même si le besoin n’est pas d’obtenir une valeur reflétant précisément une fréquence de rotation, pour autant il est important que chaque évolution de la vitesse de rotation de chaque moteur puisse être décelée pour éviter un blocage du pont élévateur. Les fréquences relativement basses de rotation des moteurs (inférieure à 500Hz) induisent des variations de tensions en sorties des convertisseurs, inférieurs à 50 mV. L’électronique d’acquisition, de transmission et de traitement de ces signaux de faibles amplitudes, induit des taux d’erreur trop important pour considérer son fonctionnement comme suffisamment fiable pour prévenir un blocage du pont élévateur.
Par conséquent, ces PCB de conversions des signaux de fréquences en tension doivent être remplacés par d’autres dispositifs, avec un impact le plus réduit possible, sur la conception générale du système électronique global.
Conclusions
Compte tenu de l’analyse précédente, et de la préparation de l’intégration de ce système dans le diorama de la Batcave, des modifications doivent être apportées sur certains éléments.
Remplacer les modules convertisseurs de fréquences en tension
Cette action est certainement la plus déterminante des modifications à apporter. L’objectif est de proposer des modules dont l’évolution de l’amplitude des signaux de tension en sortie soit significative pour en obtenir des mesures fiables. La solution consistant à concevoir, puis réaliser des PCB sur mesure convertisseur de fréquence en tension, a déjà été écartée depuis la conception détaillée de ce système électronique, pour des raisons de temps et de qualité de réalisation. Il reste donc deux pistes de réflexion à l’étude. La première consiste à reprendre une phase de recherche de PCB manufacturés plus adaptés aux fréquences du système. La deuxième consiste à remplacer les PCB dédiés à cette fonction par des éléments plus génériques mais programmables, comme par exemple des cartes Arduino.
Quelque soit la solution de remplacement qui sera choisie, il parait incontournable de prévoir aussi une modification des PCB servant de Bornier de raccordement électrique de ces modules dans l’armoire électrique concernée.
Une phase de conception complémentaire doit être mise en oeuvre pour cela.
Améliorer la présentation esthétique des PCB borniers
La solution a déjà été évoquée et mise en oeuvre dans les armoires de raccordement électrique des plateformes moteurs. Il s’agit de concevoir et d’imprimer en 3D des pièces reproduisant la fonction de sabot de charpente. Ces pièces permettent tout d’abord un regroupement visuel de plusieurs composants électroniques, sous ensembles d’une même fonction. De plus, ces pièces assurent une meilleure rigidité mécanique de l’ensemble qu’elles forment avec les connecteurs et évitent ainsi les déformations liées à la torsion de l’action du tournevis sur les vis de serrage.
Une phase de conception complémentaire doit être mise en oeuvre pour cela.
Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.
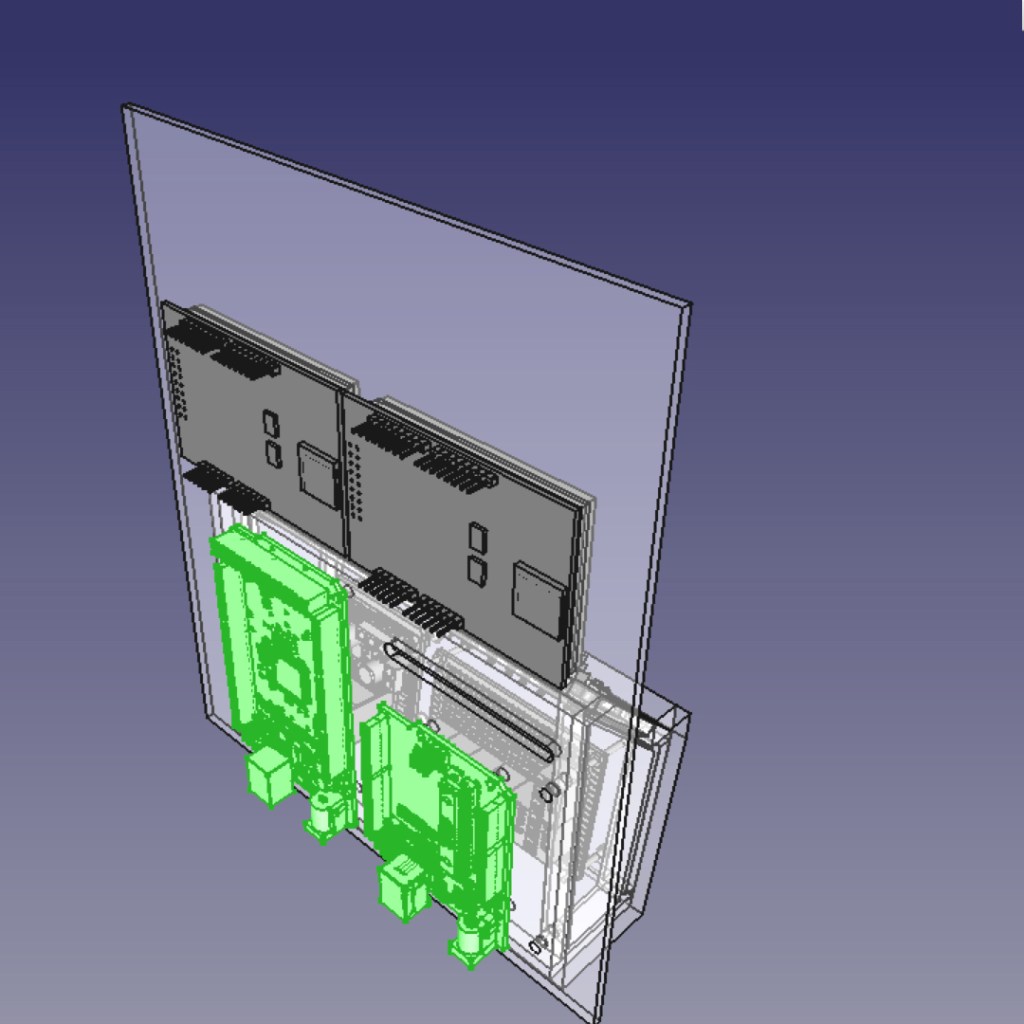
Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
Cartes électroniques de puissance
Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
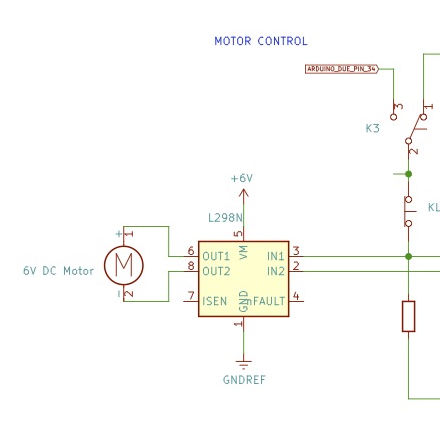
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
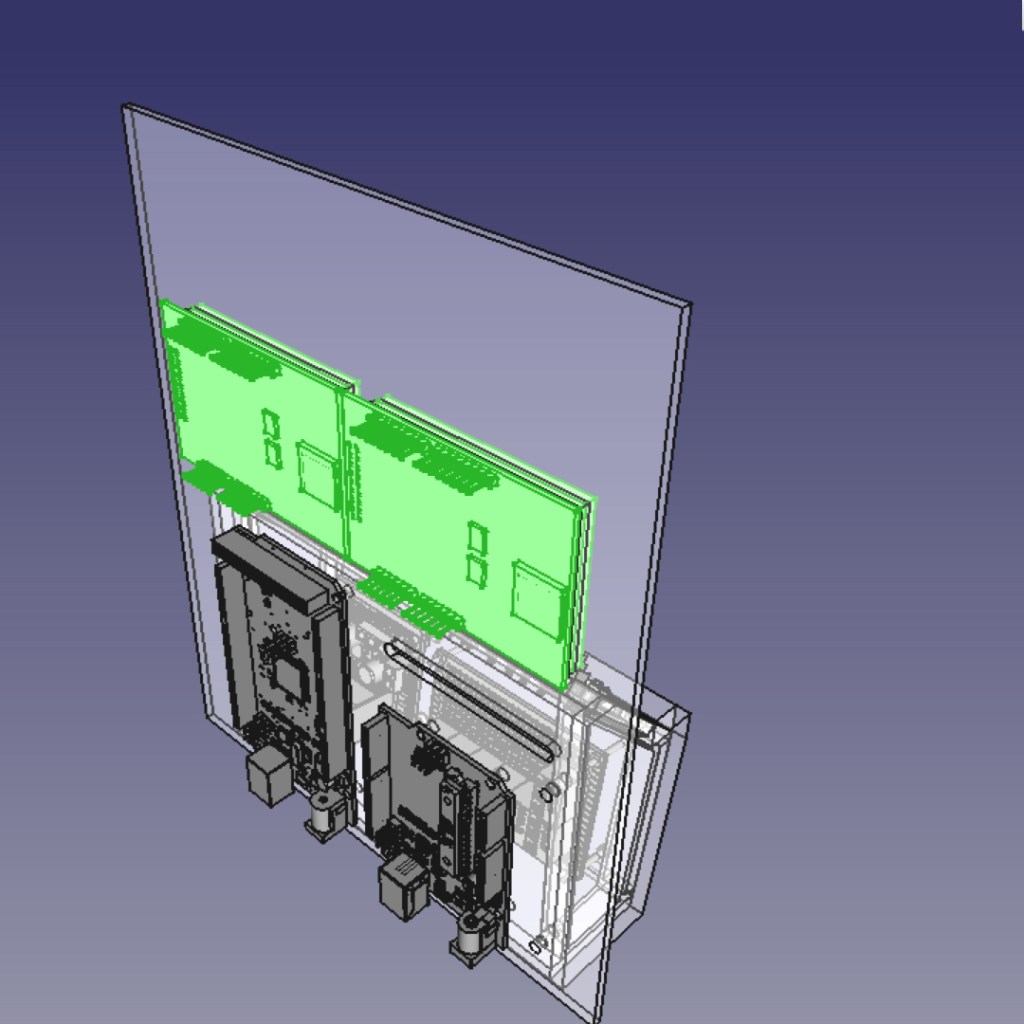
Cartes Arduino
Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
Panneau des commandes
La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
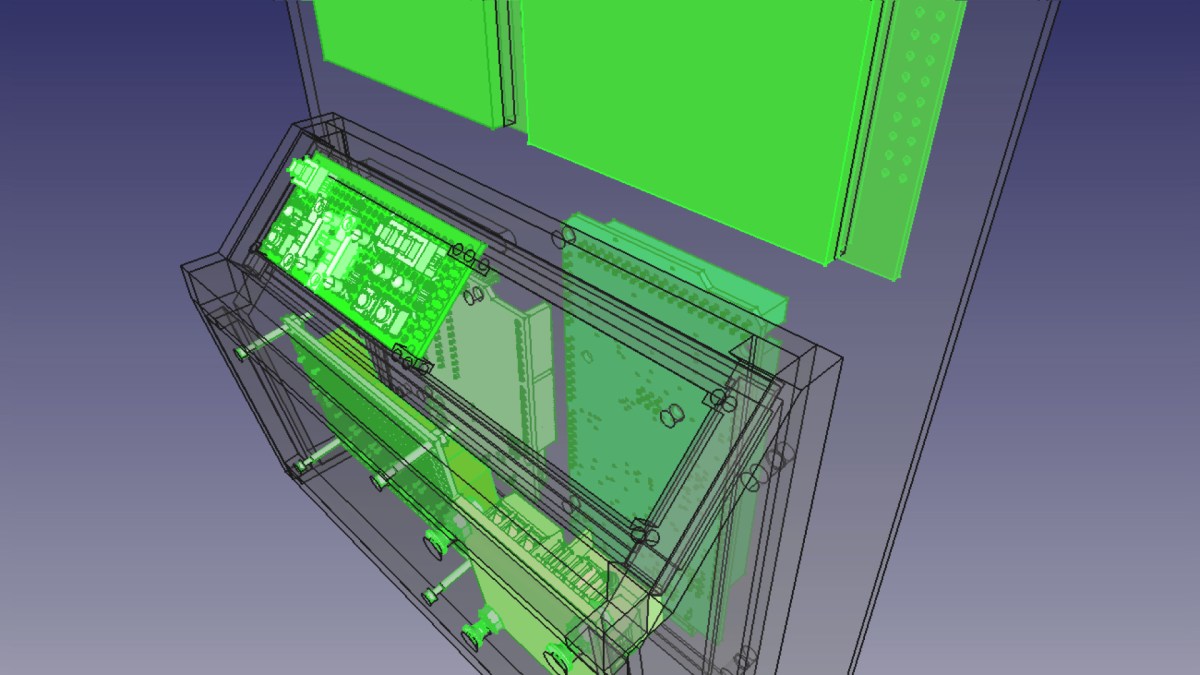
Ecrans de contrôle
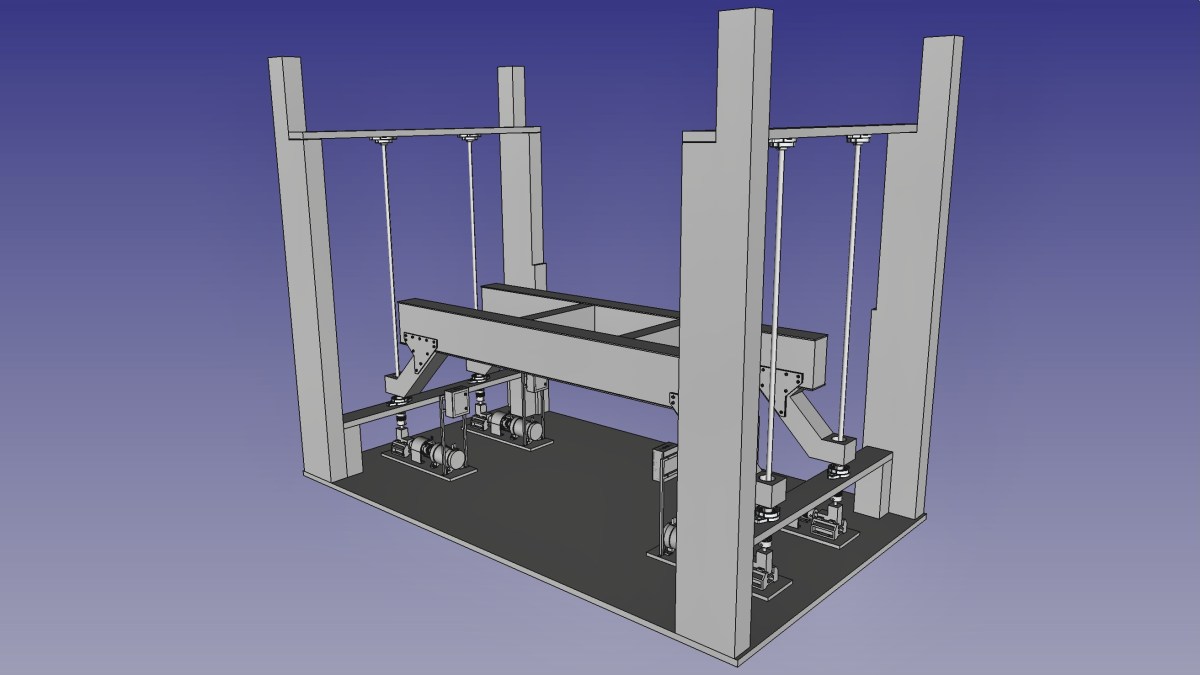
Modélisation 3D
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.
La réalisation du diorama technique du projet BATLab112 requiert la mise en œuvre d’une infrastructure de commande fiable, didactique et cohérente avec les fonctions attendues du dispositif final. La console de commande, élément central de l’interface opérateur, constitue à ce titre un module critique. Elle assure l’articulation entre les commandes manuelles, les systèmes d’automatisation futurs et l’ensemble des actionneurs mécaniques, notamment le moteur de la plateforme rotative.
Après validation du concept mécanique de la console et de l’agencement des composants électroniques (écrans, boutons, commutateurs, microcontrôleurs), une première étape de prototypage électronique a été entreprise. L’objectif de cette phase est de vérifier la pertinence des choix techniques, d’évaluer l’ergonomie des modes de commande et de valider les comportements fonctionnels avant passage à une intégration définitive.
Le présent document propose une description détaillée de cette première version électronique, de son architecture générale aux essais menés sur maquette, en adoptant une démarche rigoureuse conforme aux standards de conception en électronique appliquée.
+ d’infos sur la conception préliminaire de la console de commande :
La structure électronique de la console de commande repose sur un schéma de principe élaboré à l’aide du logiciel libre KiCad, choisi pour sa flexibilité, sa richesse fonctionnelle et sa compatibilité avec les environnements de prototypage rapide.
L’architecture est organisée en deux sous-systèmes principaux :
Le module de gestion des commandes manuelles, intégrant les commandes de l’opérateur (boutons, commutateurs, voyants).
Le module d’interface de puissance, assurant la mise en forme et la distribution des signaux vers le moteur à courant continu responsable de la rotation de la plateforme.
Cette séparation fonctionnelle répond à un impératif de lisibilité du schéma mais également à une logique de modularité favorisant les évolutions ultérieures.
KiCad
Ce schéma électronique est réalisé avec la suite logicielle KiCad distribuée librement.
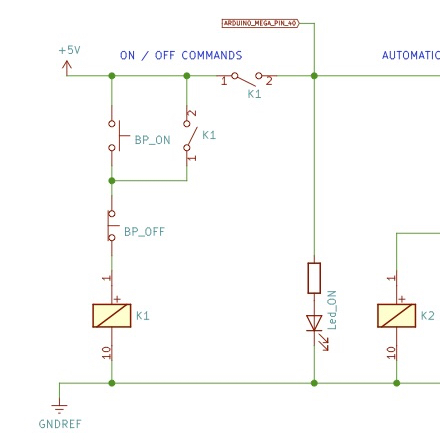
La partie supérieure du schéma se divisent en 5 parties dédiées à la gestion des commandes. La partie inférieure du schéma est dédiée à l’interface entre les commandes et l’alimentation du moteur de rotation de la plateforme.
Mise sous tension – arrêt général
La mise sous tension générale est réalisée au moyen d’un relais à auto-maintien, solution fréquemment adoptée dans les environnements industriels.
Le principe consiste à maintenir l’alimentation du circuit tant que le relais reste excité, l’opérateur pouvant interrompre cette excitation via un bouton poussoir d’arrêt. Cette architecture garantit la sécurité fonctionnelle du dispositif tout en simplifiant le comportement de remise en service.
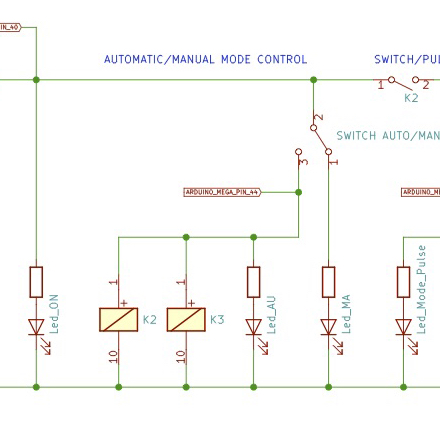
Sélection du mode Auto / Manuel
Un commutateur à deux positions permet de choisir entre un mode automatique et un mode manuel. Ce choix conditionne la provenance des signaux de commande :
En mode manuel, les boutons opérateur commandent directement les relais gérant le sens de rotation.
En mode automatique, ces mêmes relais sont pilotés par l’unité d’automatisation (qui sera intégrée dans une phase ultérieure du projet).
BP_ON : Bouton poussoir de commande du relais K1
K1 : Relais dont un contact est utilisé pour assurer son auto-maintien. Le deuxième contact est utilisé pour mettre sous tension tout le reste du montage.
BP_OFF : Bouton poussoir de coupure de l’alimentation du relais K1.
Led_ON : Led dont l’allumage dépend du deuxième contact du relais K1.
SWITCH AUTO/MAN : Commutateur permettant d’alimenter soit les relais K2, K3 et la Led Led_AU, soit la Led Led_MA seule.
K2 : Relais dont un des contacts autorise la mise sous tension de la suite du montage.
K3 : Relais dont les contacts aiguilles vers l’interface de puissance du moteur, les commandes manuelles ou les commandes automatiques.
Led_AU : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position AUTO.
Led_MA : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position MAN.
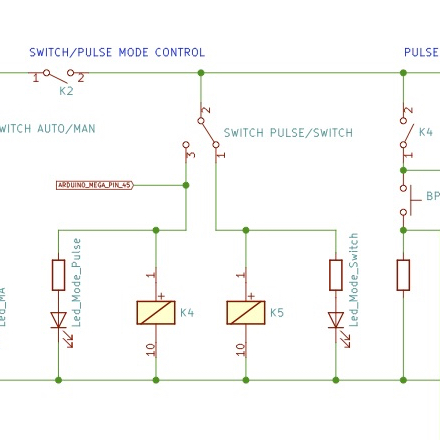
Sélection du mode Switch / Pulse
La sélection entre le mode switch et le mode pulse est assurée par un commutateur à 2 positions.
SWITCH PULSE/SWITCH : Commutateur permettant d’alimenter soit K4 et Led_Pulse, soit K5 et Led_Switch.
K4 : Relais dont un contact va autoriser les commandes manuelles en mode pulse.
K5 : Relais dont un contact va autoriser les commandes manuelles en mode switch.
Led_Pulse : Led dont l’allumage est commandé par le commutateur en position Pulse.
Led_Switch : Led dont l’allumage est commandé par le commutateur en position Switch.
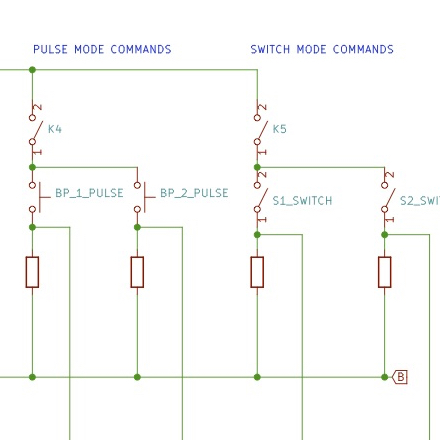
Switch & Pulse Commands
Les commandes manuelles en mode pulse sont assurées par des boutons poussoirs classiques. Il est nécessaire de maintenir l’appui sur le bouton poussoir maintenir la commande.
Les commandes manuelles en mode switch sont assurées par des boutons poussoirs à maintien de position. un premier appui bloque le bouton poussoir en position pour activer la commande. Un second appui, libère la position du bouton poussoir est arrête la commande.
PB1_PULSE: Bouton poussoir de commande de la rotation du moteur dans un sens.
PB2_PULSE : Bouton poussoir de commande de la rotation du moteur dans l’autre sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans un sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans l’autre sens.
Controller commands
Les contacts du relais K3 permettent d’aiguiller vers le moteur, soit les signaux des commandes manuelles soit ceux des commandes automatiques.
LED_R1 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
LED_R2 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
DC Motor controller
L’interface de puissance qui assure le pilotage du sens de rotation du moteur à partir des signaux de commandes numériques manuelles ou automatiques est une carte électronique basée sur un L298N.
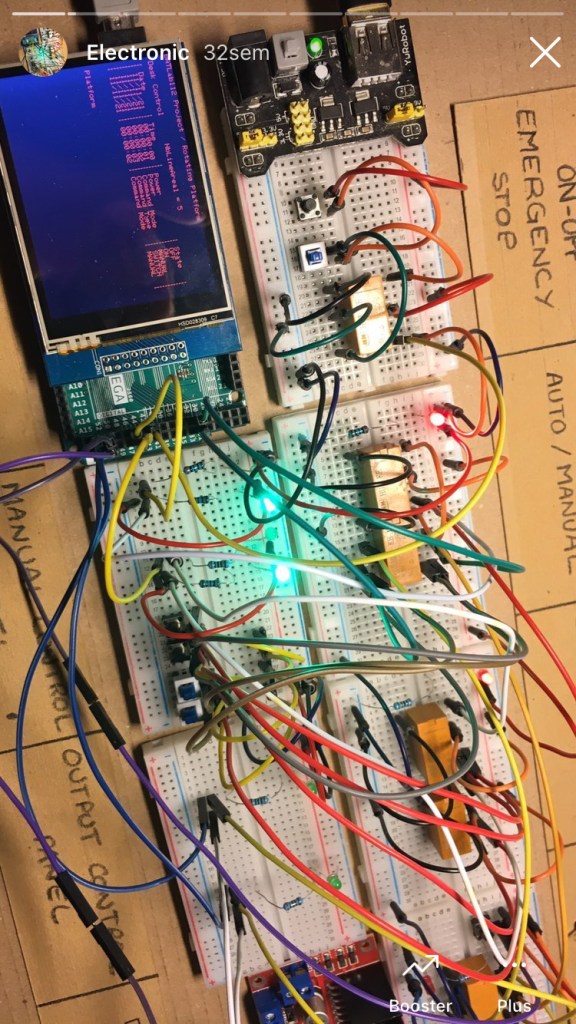
Maquette
Afin de valider ces choix, une maquette physique du circuit a été réalisée. Le câblage sur plaque expérimentale (protoboard) a permis :
de vérifier la cohérence des connexions ;
de confirmer la compatibilité électrique entre les éléments ;
d’effectuer une série de tests fonctionnels (mise sous tension, bascules de modes, commandes moteurs).
Cette démarche de prototypage intermédiaire est conforme aux bonnes pratiques de l’ingénierie électronique, permettant de déceler d’éventuelles incohérences avant la production d’un circuit imprimé ou l’intégration dans l’environnement mécanique définitif.
Test de fonctionnement
Cartes électroniques
Conclusion
Cette première itération électronique de la console de commande du diorama BATLab112 constitue une étape structurante du projet. Elle permet de valider l’ensemble des fonctions de base : gestion de la mise sous tension, sélection des différents modes de commande, pilotage du moteur de la plateforme rotative et évaluation de l’ergonomie opérateur.
L’architecture modulaire mise en place offre une marge significative pour les développements ultérieurs, notamment :
l’intégration d’un système de contrôle automatisé basé sur Arduino ou équivalent,
la mise en place d’un affichage en temps réel via un écran TFT 2,8’’,
la migration vers un câblage définitif en adéquation avec les contraintes mécaniques du diorama.
En ce sens, ce prototype représente un jalon essentiel dans la transition entre la conception préliminaire et la validation fonctionnelle du dispositif final, illustrant une démarche académique structurée et reproductible.
La conception préliminaire de la console de commande fait suite à la phase d’étude préliminaire des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
Le design retenu pour ce premier prototype, issu de la phase de benchmarking, est constitué de deux sous-ensembles : un pupitre et un panneau vertical.
Vues de détails
Pupitre
Le design du pupitre présente un panneau incliné pour supporter les commandes manuelles et un panneau avant légèrement incliné vers l’intérieur pour une meilleur approche de l’opérateur.
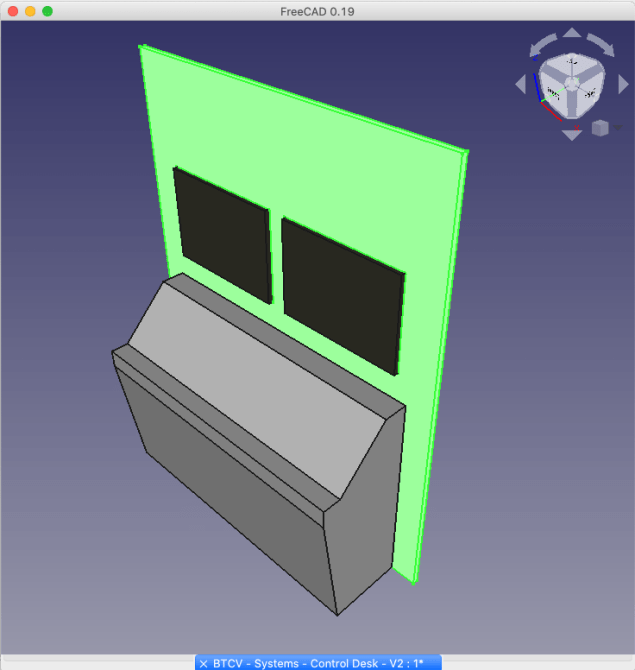
Panneau vertical
Le design panneau vertical est conçu pour intégrer deux écrans de contrôle et supporter deux cartes Arduino fixées à l’arrière.
Structure du pupitre
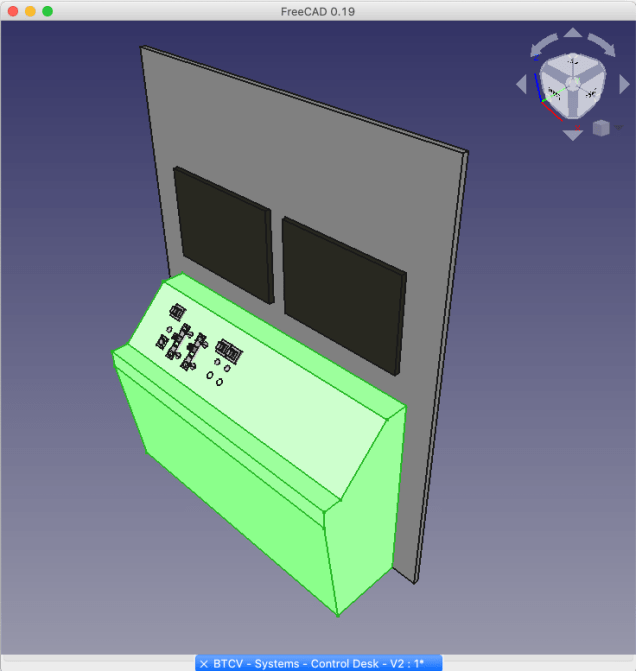
Screenshot n°1
Screenshot n°2
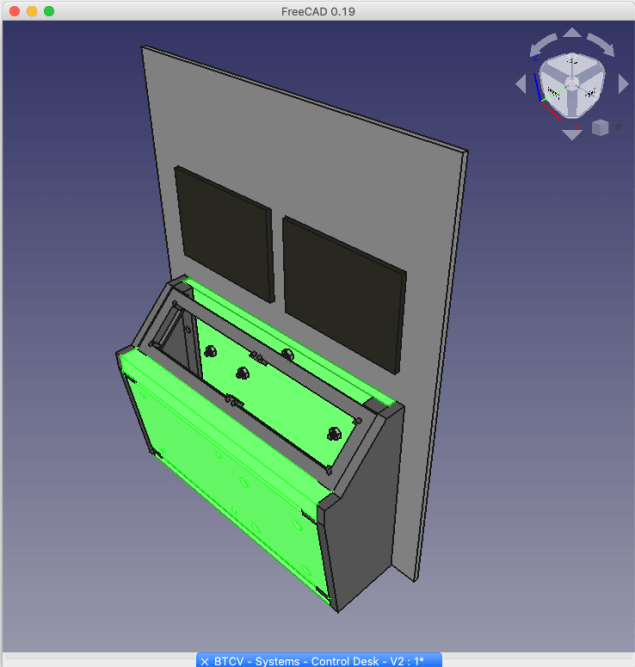
Screenshot n°3
Le design des deux pièces latérales (screenshot n°1) donne la forme générale au pupitre selon les critères retenues lors de la phase benchmarking. Compte-tenu de la complexité du design de ces pièces, elles seront réalisées par impression 3D.
Le design du cadre incliné (screenshot n°2) est conçu pour pouvoir fixer 2 PCB au format 20×80 mm, côte à côte. Cette pièce sera aussi réalisée par impression 3D pour des raisons de précisions de réalisation.
Les autres pièces (screenshot n°3) constituant le pupitre, seront réalisées en bois pour assurer la robustesse de l’ensemble et faciliter le travail de percage lors de la fabrication du prototype.
Modélisation 3D
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.