
Arduino
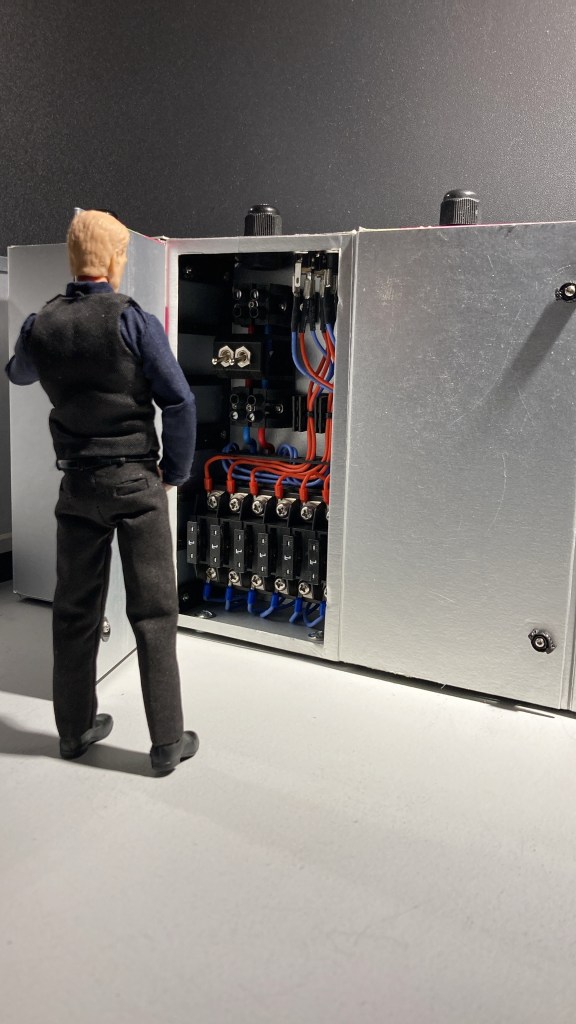
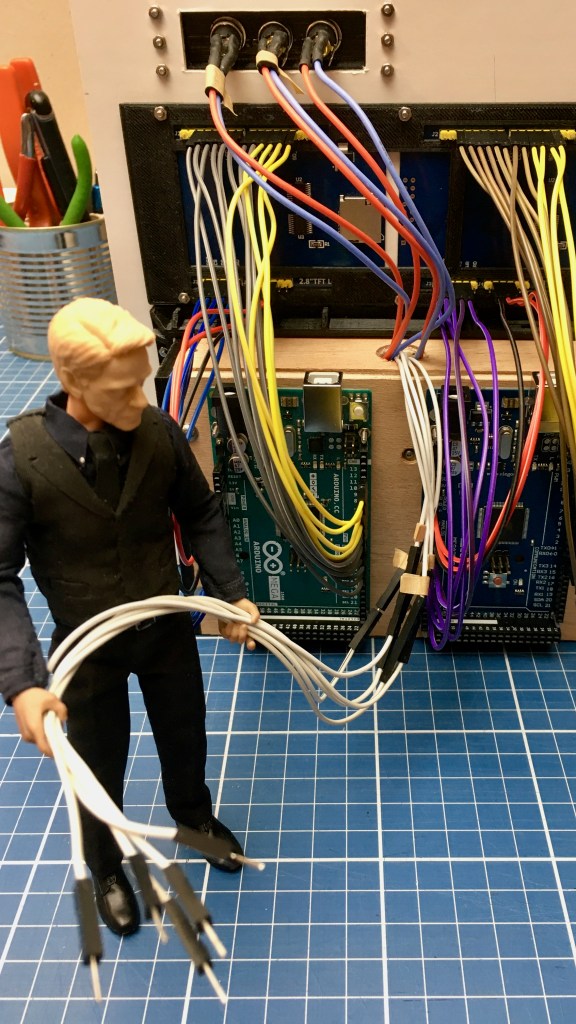
Carte électronique Arduino utilisée dans le diorama du projet BATLab112
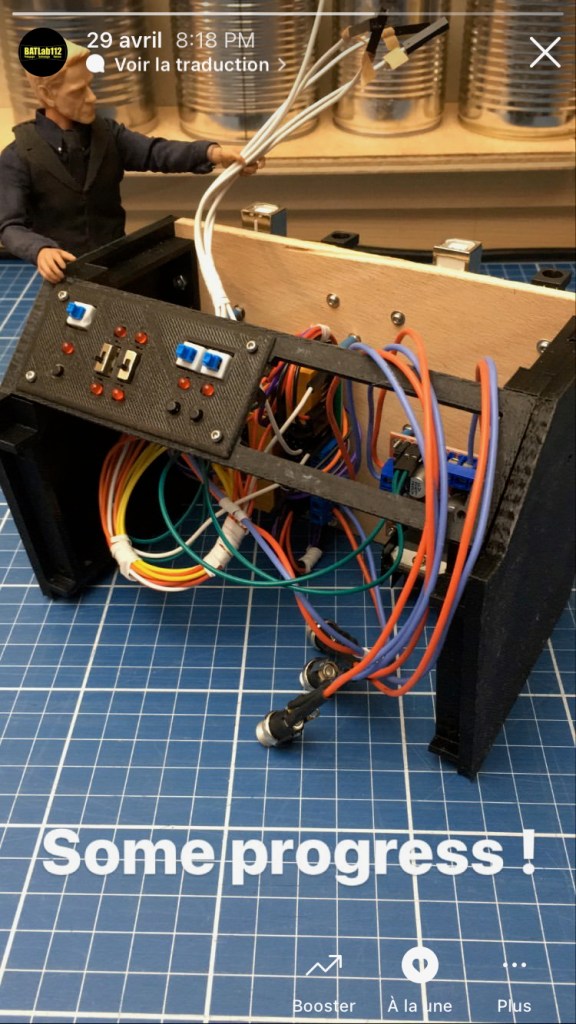
Story – Plateforme rotative – 002

Categorie :
Légende :
Test de l’électronique de commande du moteur d’entrainement de la plateforme rotative de la Batcave.
























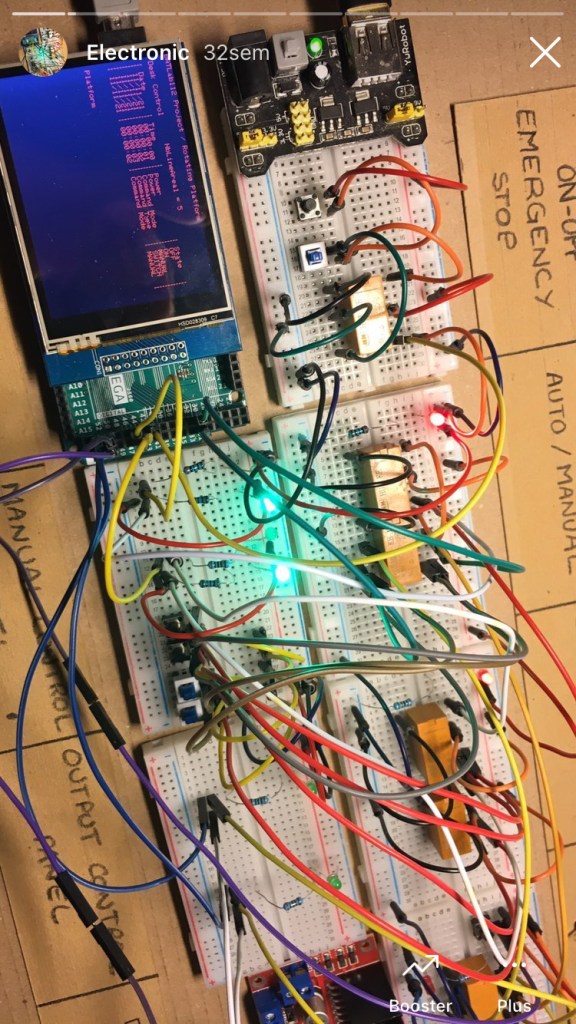
Story – Plateforme rotative – 001
Categorie :
Légende :
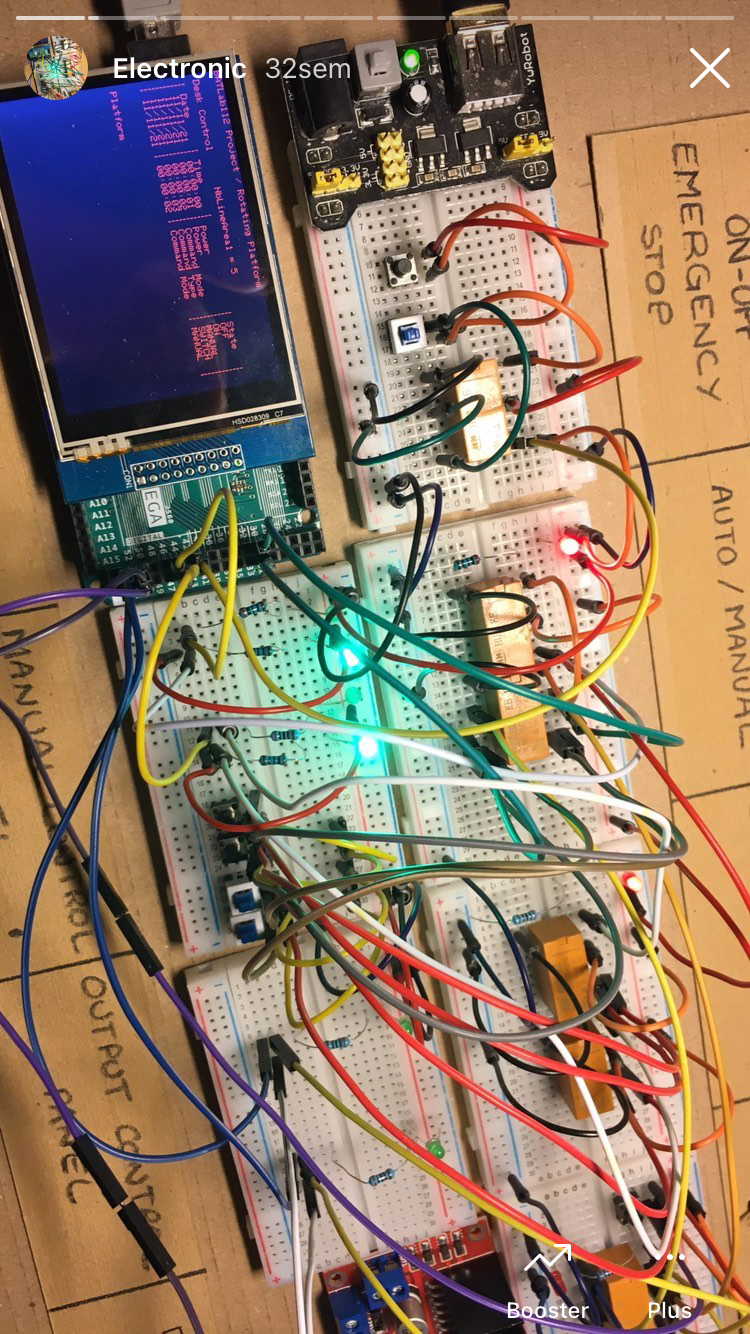
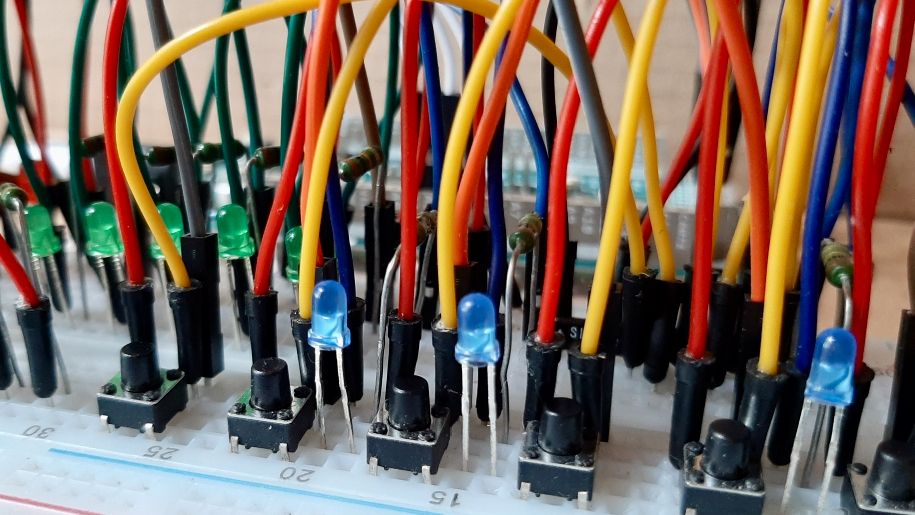
Prototypage du câblage de l’électronique de commande du moteur d’entraînement de la plateforme rotative de la Batcave.
- Plaques de prototypage électronique
- 1 carte Arduino Mega 2560 équipée d’un écran tactile TFT 2,8 pouces
Tags :









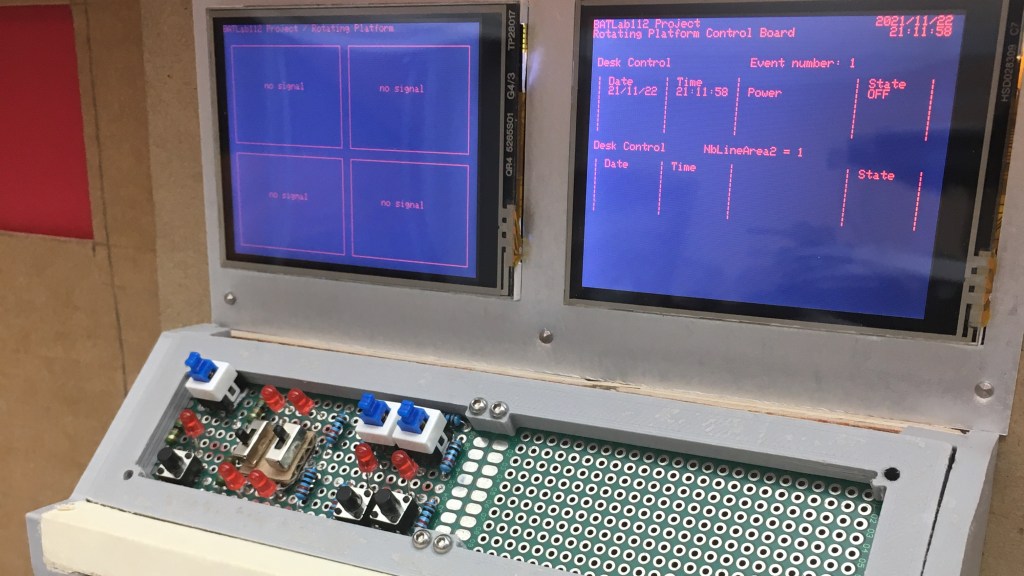
Console de commande – Prototype
Bras robotique – Prototype 1
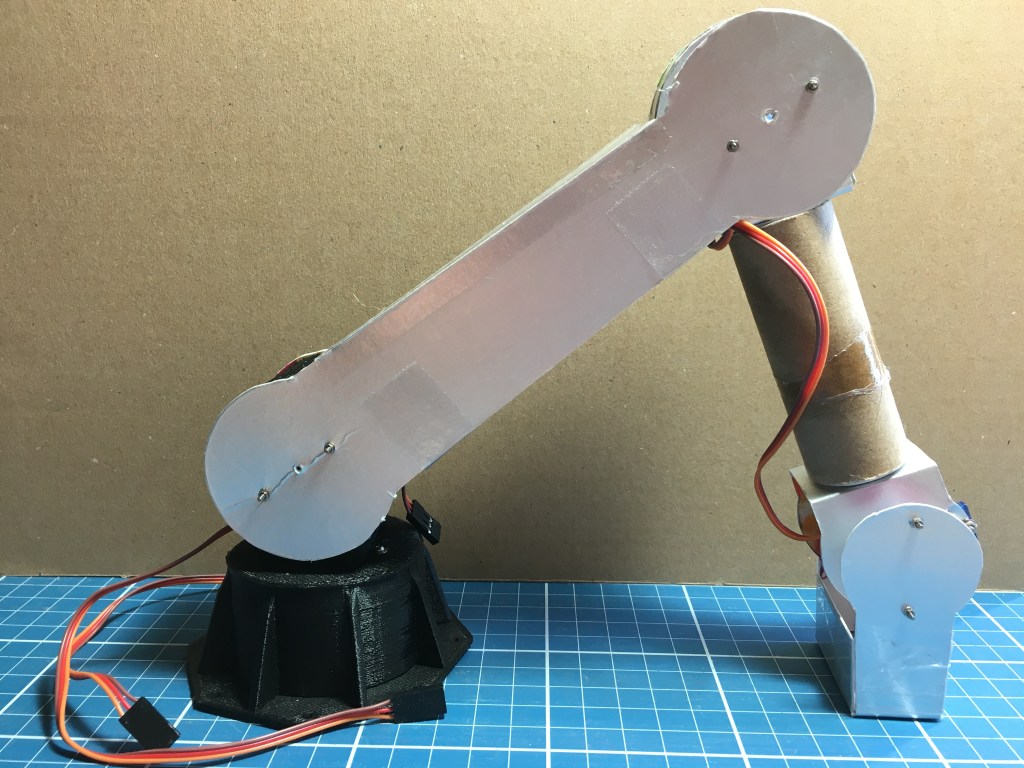
Cet article présente la réalisation du prototype des bras robotiques qui équipent l’atelier de la Batcave du projet BATLab112. L’objectif de ce prototype est de permettre la validation de la conception du design général ainsi que le choix de fabrication par impression 3D.
Modélisation 3D

Logiciel de CAO 3D
La modélisation 3D des bras robotiques de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.17.
Des bras robotiques à 4 degrés de liberté

Les bras robotiques disposent de 4 degrés de liberté, autrement dit 4 articulations. Un moteur installé dans chaque articulation en assure sa rotation.
Fabrication
Impression 3D des pièces mécaniques
Les impressions 3D des premières pièces de ce prototype sont réalisées par Paul membre de la communauté de soutien du projet BATLab112, avec une imprimante ANET A8.
Motorisation des articulations
Le choix des moteurs équipant les articulations est déterminant en terme de performance pour les bras robotiques en termes de vitesse et de fluidité des mouvements. Les moteurs sélectionnés pour la réalisation de cette première version sont des servomoteurs.
Servomoteurs

Qualification de ce choix
Avantages
Alimentation électrique en courant continu
- Intégration technique facilité
- Compatibilité avec l'électronique de commande (Arduino notamment)
Asservissement en position angulaire
- Commande simplifiée
- Conforme avec la logique mécanique des articulations
Maintien de la position
- Commande simplifiée
Dimensions réduites
- Intégration mécanique facillité
Approvisionnement et coût
Inconvénients
Technologie
Cette technologie n'est pas conforme avec celle des robots industriels. Cet aspect sera pris en compte dans une futur version
Couple
Capacité incertaine à assurer le mouvement
Tests de fonctionnement
Electronique de commande
Ce test de fonctionnement utilise une électronique de commande décrite dans l’article suivant :

Commande du bras robotique .V1
Présentation de la réalisation de la première version de l’électronique de commande des bras robotisés équipant l’atelier de la Batcave du projet BATLab112.
Pour valider cette électronique de commande, une maquette du bras robotique a été réalisée en emballage alimentaire. Le résultat obtenu est plutôt satisfaisant, compte tenu d’un niveau passable de qualité de fabrication, comme le montre la vidéo suivante.
Alimentation électrique
Le circuit d’alimentation électrique utilisé est le même que celui pour valider la commande électronique. Ce circuit est constitué des composants suivants :

Un convertisseur 230VAC / 12VDC – 180 W pour l’alimentation électrique des 2 convertisseurs suivants.
Source : www.amazon.fr

Un convertisseur 12V DC / 5V DC – 50W pour l’alimentation électrique de l’électronique de commande et de la carte Arduino Due.
Source : www.amazon.fr

Un convertisseur 12VDC / 6VDC – 60W pour l’alimentation électrique des 4 servomoteurs.
Source : www.amazon.fr
Test fonctionnel mécanique
Configuration mécanique
Le montage utilisé comprend la tourelle et l’épaule en impression 3D associé uniquement au bras, réalisé en emballage alimentaire.
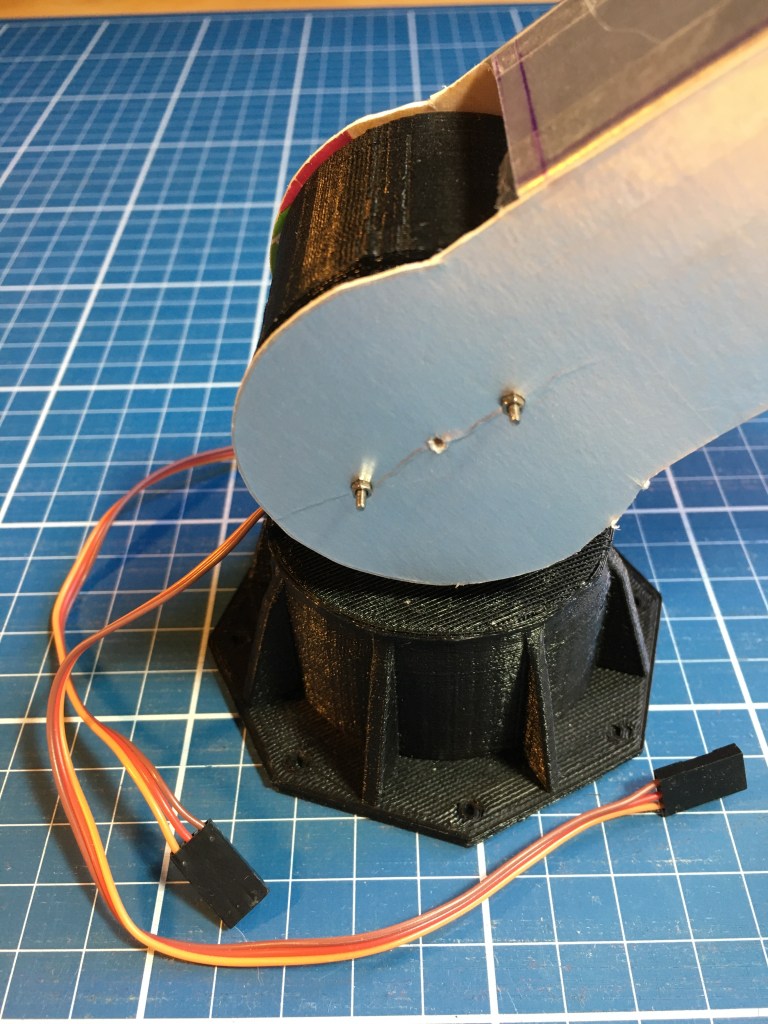


Résultats
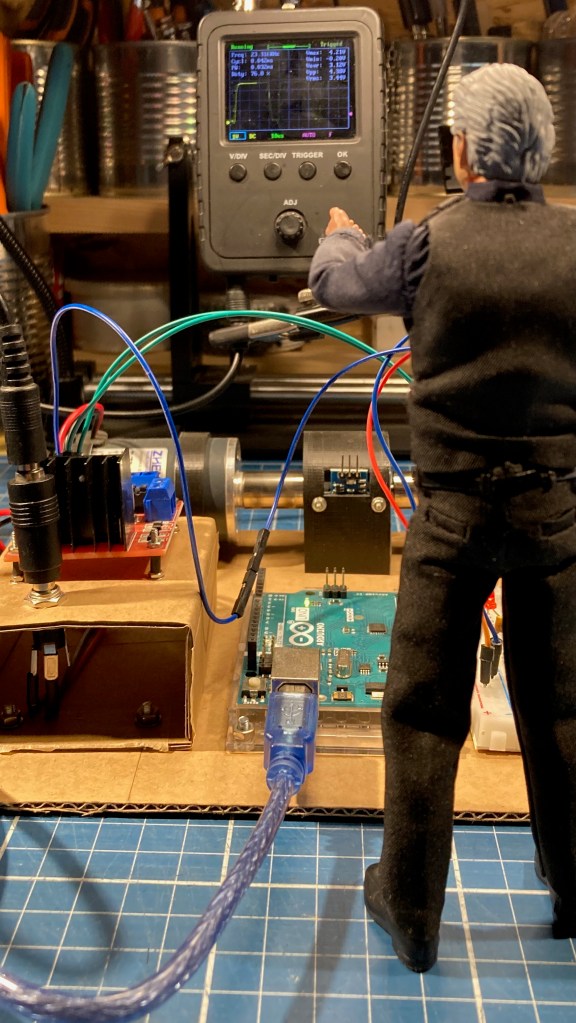
Les résultats des premiers tests sont plutôt décevants. Le bras entre en oscillation très rapidement.
Plusieurs pistes sont à explorer pour résoudre ce problème :
– Le découplage de l’alimentation électrique des servomoteurs.
– La modification de la fréquence des signaux PWM émis par la carte Arduino.
– Le changement du servomoteur de l’épaule.
A suivre !…
Commande du bras robotique .V1
Cet article présente la réalisation de la version 1 de l’électronique de commande des bras robotiques équipant le diorama de la Batcave du projet BATLab112.
Cahier des charges
Objectif général
L’objectif opérationnel est de réaliser une maquette électronique assurant la commande en mode manuel et en mode automatique des bras robotisés équipant le diorama de la Batcave du projet BATLab112. Cette maquette doit permettre dans un premier temps, une commande des bras robotiques suivant trois modes de fonctionnement : Mode manuel, Mode automatique, Mode apprentissage.
L’objectif pédagogique consiste à se familiariser avec les principes de commande des servomoteurs.
Spécifications fonctionnelles
La sélection des différents mode de fonctionnement des bras robotiques par l’opérateur doit s’effectuer par des boutons poussoirs. Des voyants assurent la visualisation des états de fonctionnement.
Mode manuel
En mode manuel, les 2 bras robotiques sont commandés indépendamment. La commande des articulations est réalisée par l’intermédiaire de potentiomètres rotatifs. Cette commande doit s’effectuer en temps réel. La rotation de l’axe d’un potentiomètre doit entrainer la rotation de l’articulation correspondante.
Mode automatique
En mode automatique, les 2 bras robotisés sont commandés, indépendamment ou simultanément, suivant des consignes différentes. La commande des articulations est gérée par une unité de contrôle dans laquelle sont enregistrées l’ensemble des consignes nécessaires.
Mode apprentissage
En mode apprentissage, les 2 bras robotisés sont commandés indépendamment ou simultanément. L’enchainement des positions à apprendre pour chaque bras robotisé est défini par l’utilisation des commandes du mode manuel. La restitution de l’enchainement des positions enregistrées pour chaque bras est réalisée en mode automatique.
Spécifications techniques
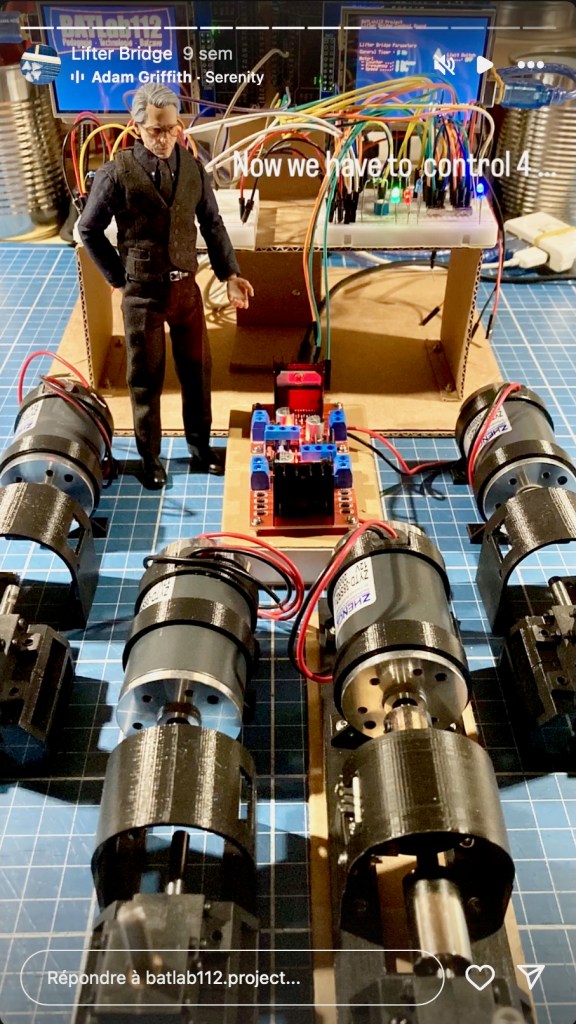
Les actionneurs à commander
Chaque articulation des bras robotiques est équipée d’un servomoteur. Chaque bras est ainsi équipés de 4 servomoteurs.
L’unité de contrôle
L’unité de contrôle est une Carte Arduino Due.
Listes du matériel
Liste du matériel support
| Désignation | Qté | Référence | Source |
|---|---|---|---|
| Platine de prototype | 1 | Breadboard 830 NeufTech | www.amazon.fr |
| Alimentation 5VDC | 2 | USB | |
| Alimentation 6VDC | 1 | Servomoteurs |
Remarque : Les composants des alimentations électriques seront spécifiquement traités dans un prochain article.
Liste des composants utilisés
| Désignation | Qté | Référence | Source |
|---|---|---|---|
| Unité de contrôle | 1 | Carte Arduino Due | store.arduino.cc |
| Bouton rotatif | 8 | Potentiomètre | www.amazon.fr |
| Bouton poussoir | 6 | Bouton poussoir tactile | www.amazon.fr |
| Voyant rouge | 2 | Led 3mm rouge | www.amazon.fr |
| Voyant bleu | 3 | Led 3mm bleu | www.amazon.fr |
| Voyant vert | 5 | Led 3mm verte | www.amazon.fr |
| * | 9 | Résistance |
Schéma de câblage
Dans le cadre du projet BATLab112, les schéma électriques ou électroniques sont réalisés avec le logiciel KICAD. Vous pouvez télécharger le fichier du schéma de câblage au format PDF par le lien qui suit.
Code Arduino
Commentaires concernant ce code
Le code présenté ici est une première approche pour mettre en oeuvre les fonctions nécessaires aux commandes des servomoteurs et valider le principe général de commande de la maquette. Ce code n’est donc pas optimisé.
Validation technique et fonctionnelle
La maquette du bras robotisé
Cette maquette est réalisée pour les besoins de la validation technique et fonctionnelle de l’électronique de commande associée au code développé pour la carte Arduino Due qui pilote l’ensemble.
Cette maquette est réalisée avec des emballages de briques de jus de fruit. Cette matière légère, est suffisamment résistante pour supporter les assemblages nécessaires (ruban adhésif + boulon). Elle présente aussi une face dont l’état de surface est semblable à celui de l’aluminium, ce qui donne un rendu plutôt satisfaisant.
Cette maquette ne respecte pas fidèlement le design conçu en modélisation 3D et présente des défauts de fabrication qui induisent des perturbations dans les mouvements telles que des vibrations.
La vidéo du mode automatique
Conclusions
Electronique de commande
Ces tests permettent de valider le montage de l’électronique de commande des servomoteurs.
Trois points d’améliorations sont identifiés pour être intégrés dans les futures versions.
- Point n°1 : Commandes manuelles
- Constat : Les actions sur les potentiomètres de commande des servomoteurs impliquent l’usage d’un tournevis.
- Evolution : Equiper les potentiomètres de boutons
- Points n°2 : Enregistrement des positions en mode automatique
- Constat : Les positions prédéfinies du mode automatique nécessitent la programmation de la Carte Arduino Due.
- Evolution : Disposer d’un interface plus élaboré que des boutons poussoirs pour enregistrer ces positions sans avoir recours à la re-programmation systématique de la carte (exemples : clavier + écran ou écran tactile).
- Points n°3 : Enregistrement des positions en mode apprentissage
- Constat : Le nombre de positions disponible dans le mode apprentissage est limité à 5, ce qui est insuffisant pour envisager des enchaînement de trajectoires complexes.
- Evolution : Disposer d’un interface plus élaboré que des boutons poussoirs et des Leds pour enregistrer ces positions (exemples : clavier + écran ou écran tactile).
Arduino Due + Code
Ces tests permettent de valider l’utilisation de la Carte Arduino Due et sa capacité à supporter le code nécessaire à la commande des servomoteurs.
Un point d’amélioration est identifié pour être intégré dans les futures versions.
- Point n°4 : Codage de trajectoire plus fluide
- Constat : Dans la démonstration réalisée en mode automatique les servomoteurs sont pilotés les uns après les autres pour atteindre chacune des positions. Cette méthode induit des mouvements lents et décomposés.
- Evolution : Développer un pilotage simultané des servomoteurs pour obtenir des mouvement plus fluides et rapides
Servomoteurs
Ces tests permettent de valider l’utilisation de 3/4 servomoteurs comme actionneurs des articulations des bras robotisés. Une effet, le servomoteur utilisé pour l’articulation de l’épaule semble manqué par moment de couple. Cependant, compte tenu de la qualité de fabrication de la maquette qui n’est pas optimum il est difficile de conclure.

{kind=link}