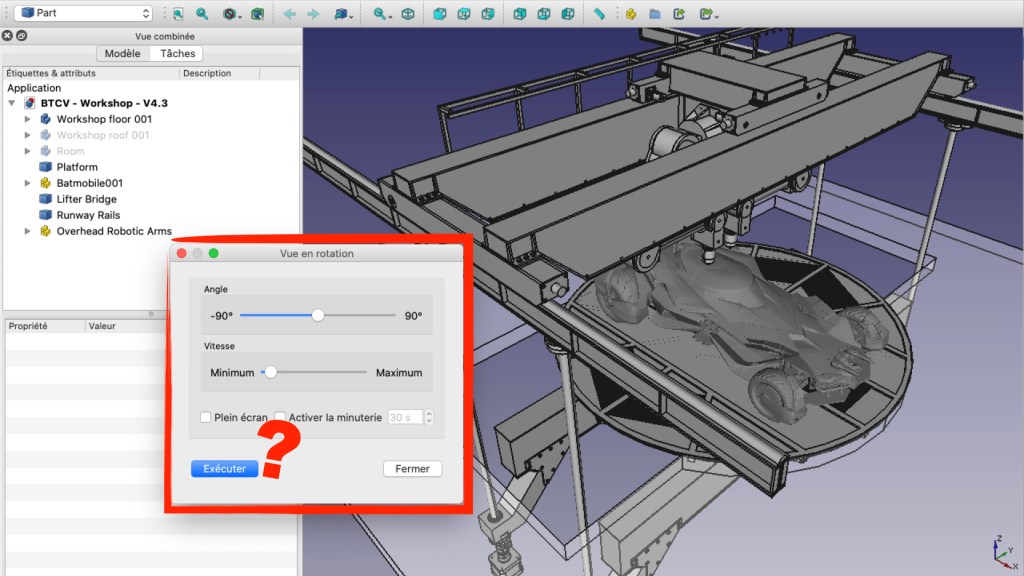
Le logiciel FreeCAD propose une option de vue en rotation, qui peut s’appliquer sur tout ou partie des objets 3D présents dans le fichier de conception en cours. Passer l’effet captivant d’une telle animation, je me suis posé la question de l’intérêt d’une telle fonction. Mon retour d’expérience sur l’utilisation du logiciel FreeCAD depuis 2018, pour concevoir le diorama de la Batcave du projet BATLab112, me permet d’apporter plusieurs réponses à cette question.
Une première réponse se trouve dans l’ADN même d’un logiciel tel que FreeCAD. En effet, une attente légitime lorsque l’on utilise un logiciel de conception 3D volumétrique, n’est-elle pas de pouvoir visualiser les objets en 3D ? Par conséquent, la vue en rotation est un excellent outil pour cela. Surtout que cette vue dynamique participe à une meilleure visualisation dans l’espace, pour se créer une image mentale des objets conçus plus précise.
Un aperçu dynamique plus complet
Si cette réponse pourrait suffire à justifier cette option de présentation sous FreeCAD, il n’en reste pas moins que son utilité va au-delà de cette évidence. Compte tenu des performance de FreeCAD, il est possible de concevoir des systèmes complexes inertes ou animés, dont la position ou le mouvement de chaque sous-ensemble est contraint par d’autres. Utiliser les angles de vue pré-réglés, tels que les vue de faces ou les vue de trois-quarts, permettent bien d’obtenir des points de vue différents du comportement des sous-ensembles entre eux. Pour autant, cette succession de points de vue ne permet pas toujours d’appréhender dans leurs globalités toutes les interactions en présence. La vue en rotation est alors un outil très interessant pour avoir un aperçu dynamique complet.
Un outil de communication
Il reste encore un avantage important à l’utilisation de cette option de vue en rotation. Savoir concevoir des systèmes 3D complexes est une chose, mais savoir communiquer sur les détails de leur conception, échanger des points de vue pour optimiser les designs ou trouver des solutions techniques, en est une autre. La vue en rotation trouve donc toute son utilité dans ce besoin de communication quelqu’en soit les raisons. Si « un bon croquis vaut mieux qu’un long discours » alors une vue en rotation vaut mieux qu’un croquis en 2D pour appréhender une conception en 3D !
Utilisation dans le projet BATLab112
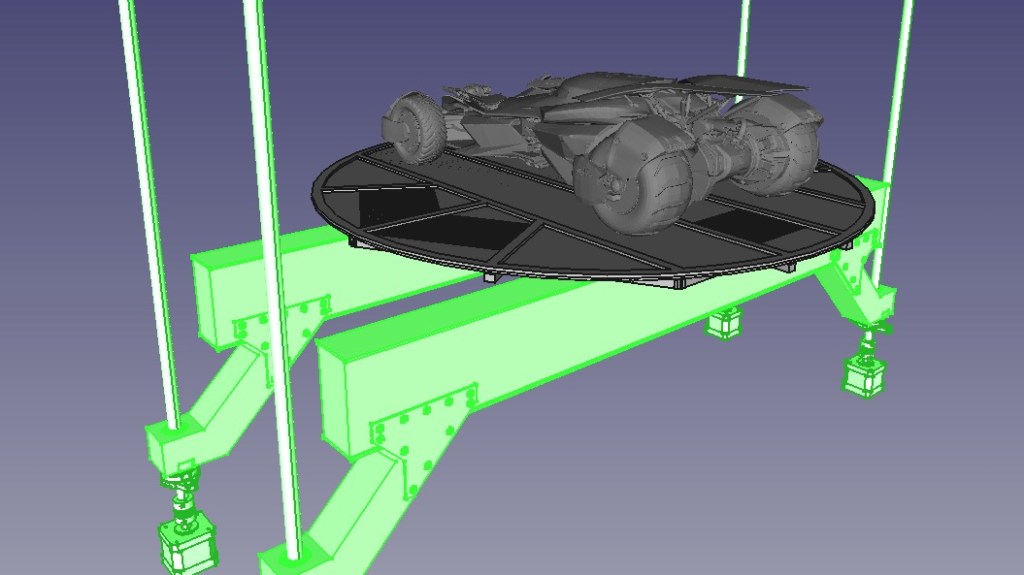
FreeCAD est utilisé pour concevoir le diorama de la Batcave du projet BATLab112. Ce diorama présente des modèles réduits d’équipements industriels, à l’échelle 1/12. Ces équipement sont tous mobiles et leurs interactions en mouvement sont millimétrées, compte-tenu de l’espace restreint dans lesquels ils sont mis en oeuvre. Par conséquent, obtenir une image mentale la plus précise possible de ce puzzle en 3D est primordial.
Cet article décrit la conception détaillée d’une armoire de distribution électrique basse tension à l’échelle 1/12 pour le diorama de la Batcave du projet BATLab112. Il expose les contraintes mécaniques et fonctionnelles rencontrées, notamment l’importance d’une structure interne robuste pour maintenir les composants et faciliter les manipulations. Les systèmes réalistes à échelle réduite et leur…
La réalisation du prototype du poste HT/BT du diorama a mis en évidence les limites du mode opératoire initialement retenu pour la fabrication des armoires électriques. En particulier, l’absence de structure interne dédiée ne permet ni d’assurer une rigidité mécanique suffisante pour des manipulations répétées, ni de garantir un maintien adéquat et pérenne des composants internes de l’armoire.
L’objectif de cette démarche est double. Il s’agit, en premier lieu, de concevoir une structure interne générique, applicable à l’ensemble des armoires électriques du diorama de la Batcave. En second lieu, il convient de développer des équipements modulaires destinés à faciliter le câblage de ces armoires à l’échelle 1/12, tout en respectant de manière aussi fidèle que possible les principes de conception, d’implantation et de fonctionnement mis en œuvre à l’échelle réelle.
L’article présente la conception détaillée et la réalisation du premier prototype fonctionnel du poste électrique HT/BT à l’échelle 1/12 pour le diorama pédagogique de la Batcave du projet BATLab112. Il s’inscrit dans la phase de conception détaillée visant à reproduire avec fidélité les fonctions d’un poste électrique industriel.
Fondements du design proposé — Héritage de la phase de parangonnage
Le design présenté dans cet article, s’inscrit dans la continuité des articles précédents mais aussi de la phase de parangonnage des équipements électriques industriels existants. Dans cet article, une analyse systématique des systèmes existants à l’échelle 1 : 1, ainsi que des principes de fonctionnement et d’architecture interne des armoires de distribution, a été conduite afin d’identifier les contraintes techniques et mécaniques applicables à une reproduction à l’échelle 1 : 12. Ces éléments ont servi de base à l’élaboration des choix de conception retenus ici, notamment en matière de structure interne, d’intégration des modules (sectionneur, porte‑fusible) et d’optimisation pour fabrication additive.
Le design actuel reprend et adapte ces principes fondamentaux, en les contextualisant dans le cadre d’une approche modulaire et manufacturable par impression 3D. Cette démarche vise à garantir la fidélité fonctionnelle et mécanique des armoires tout en tirant parti des enseignements issus de la revue des équipements existants et des solutions techniques proposées dans l’article de conception détaillée original.
L’article examine les infrastructures industrielles de distribution électrique existantes en vue de leur adaptation à un diorama pédagogique représentant la Batcave. Il détaille d’abord la structure fonctionnelle d’un poste HTA/BT, qui abaisse la tension moyenne à basse tension et regroupe les dispositifs de protection, de transformation et de distribution. Ensuite, il analyse les armoires de…
Architecture des armoires de distribution électrique à l’échelle 1/12 du diorama de la Batcave
Entrées / Sorties
Les armoires de distribution électrique sont systématiquement dotées d’une entrée d’alimentation et de six sorties. À la date de publication de cet article, ce nombre de sorties excède les besoins liés aux équipements actuellement intégrés au diorama de la Batcave dans le cadre du projet BATLab112. En effet, quatre équipements sont à ce stade en cours de développement : la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Ces dispositifs sont chacun commandés et alimentés en énergie électrique par l’intermédiaire de leurs consoles de commande respectives. Les deux sorties restantes, volontairement non affectées, ont été prévues afin d’anticiper et de faciliter l’intégration d’évolutions fonctionnelles et de nouveaux équipements ultérieurs.
Pour + d’informations concernant la conception à l’échelle 1/12 des équipements industriels présents dans le diorama :
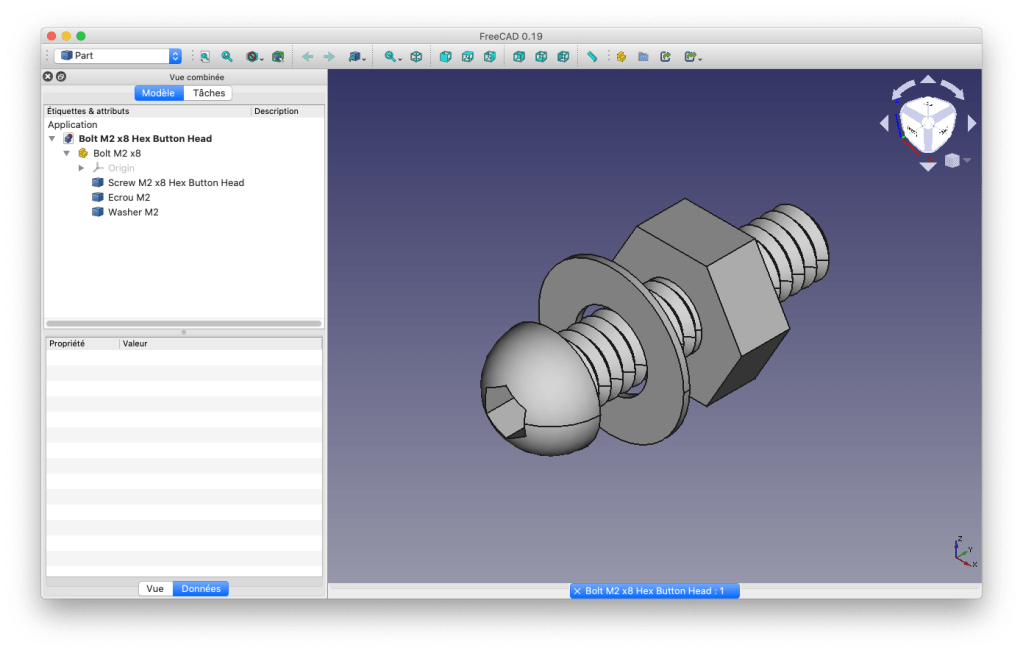
Les armoires de distribution électrique intègrent deux modules internes principaux : un sectionneur et un porte-fusible. Ces deux dispositifs ont été spécifiquement conçus et développés pour répondre aux exigences du projet BATLab112. Leur conception prend en compte les contraintes propres à une réalisation à l’échelle 1/12, tant sur le plan dimensionnel que sur celui de l’assemblage, tout en respectant les principes de fonctionnement, de sécurité et d’architecture habituellement mis en œuvre pour ce type de modules à l’échelle industrielle réelle.
Ces deux modules sont conçus pour être solidarisés à la structure interne au moyen de boulons de type M2, garantissant à la fois un positionnement précis, une fixation mécanique fiable et une facilité de démontage compatible avec les opérations de maintenance et d’évolution du système.
Principe de fonctionnement des armoires de distribution électrique du diorama
Lorsque le sectionneur est basculé en position haute, la tension d’entrée est alors distribuée à l’ensemble des sorties de l’armoire. Les fusibles assurent une fonction de protection contre les surintensités susceptibles de survenir à la suite d’un dysfonctionnement de l’un des équipements du diorama. À l’inverse, lors du basculement du sectionneur en position basse, correspondant à l’ouverture des deux interrupteurs, l’ensemble des circuits de sortie est totalement isolé de la source d’alimentation électrique.
La tension d’entrée applicable à une armoire de distribution électrique peut correspondre à l’une des trois tensions continues utilisées par les équipements du diorama, à savoir 5 VDC, 6 VDC ou 12 VDC. Le courant maximal délivrable en sortie est déterminé conjointement par le calibre des fusibles installés et par la section du câblage interne de l’armoire. Dans sa première version, le dispositif est équipé de fusibles d’un calibre de 1 A par sortie, conduisant à un courant maximal total de 6 A en entrée.
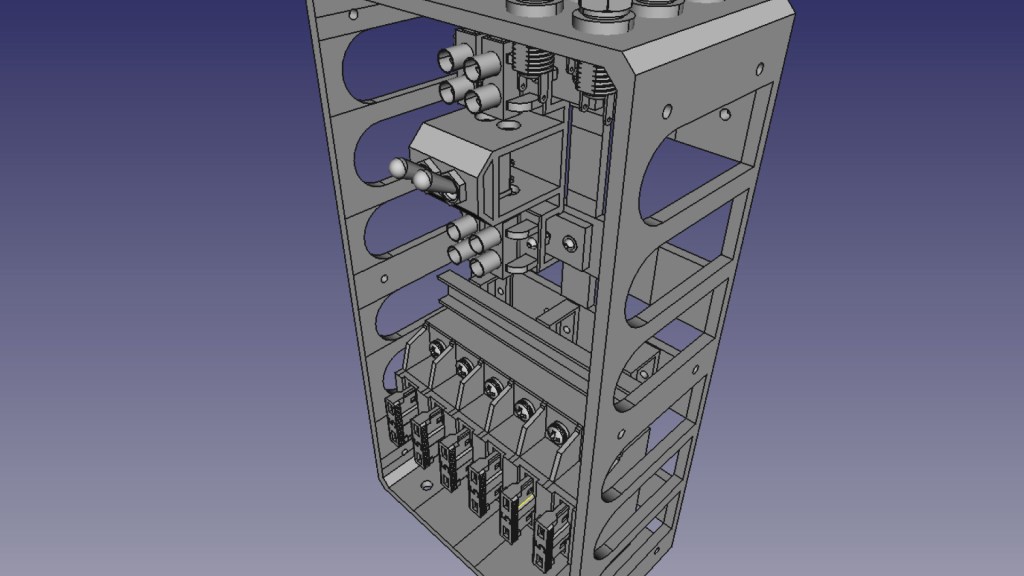
Modélisation 3D de la structure mécanique des armoires électriques du diorama
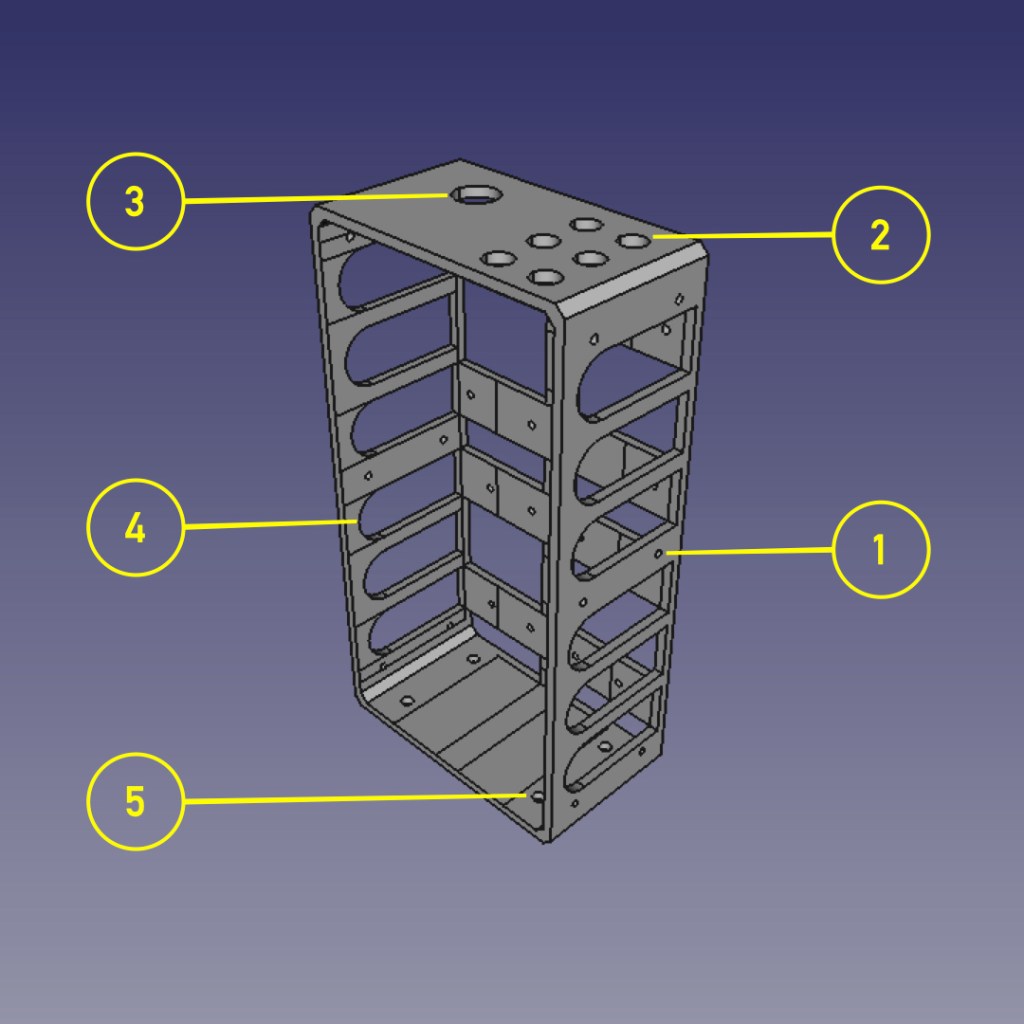
Screenshot 1 : Structure interne – Aperçu 3D 3/4 face
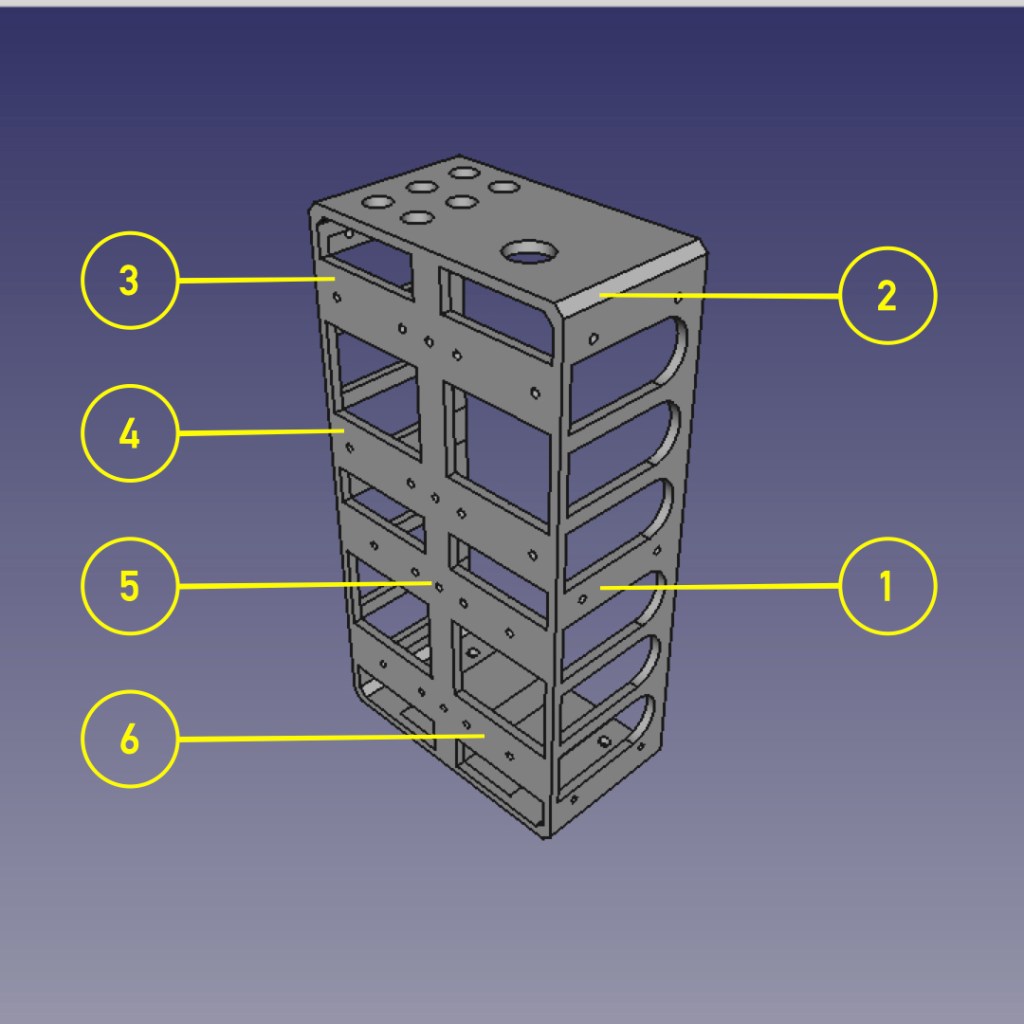
Screenshot 2 : Structure interne – Aperçu 3D 3/4 arrière
Présentation générale
La réalisation du prototype du poste HT/BT a mis en évidence les limites du mode opératoire retenu pour la fabrication des armoires électriques. En particulier, l’absence de structure interne ne permet pas d’assurer une robustesse mécanique compatible à la fois avec les contraintes d’exploitation imposées par le diorama et avec des manipulations régulières.
La conception d’une nouvelle structure interne vise à remédier à ces insuffisances en permettant la fabrication d’armoires électriques présentant des caractéristiques mécaniques adaptées aux exigences du diorama. Cette structure est spécifiquement destinée à être réalisée par fabrication additive, au moyen de l’impression 3D, afin de garantir précision dimensionnelle, répétabilité et facilité d’évolution du design.
Description détaillée
Screenshot 1
La structure interne intègre des perforations destinées à l’assemblage par boulonnage des enveloppes internes et externes.
Les emplacements pour les 6 connecteurs de type Jack en sorties.
L’emplacement pour le presse-étoupe du câble d’entrée, issu du convertisseur de puissance.
Le design global de cette structure a été optimisé pour permettre une impression 3D sans recours à des supports pour les surplombs, afin de réduire la consommation de matière et de simplifier le processus de fabrication.
La structure interne est pourvue de perçages permettant le boulonnage des armoires sur le sol du local électrique, assurant ainsi leur stabilité lors de la manipulation des portes, des boutons-poussoirs ou des interrupteurs.
Screenshot 2
Renforts latéraux pour accroitre la rigidité de la structure
Chanfrein pour prendre en compte le pli des panneaux de l’enveloppe externe.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Modélisation 3D du module sectionneur des armoires électriques du diorama
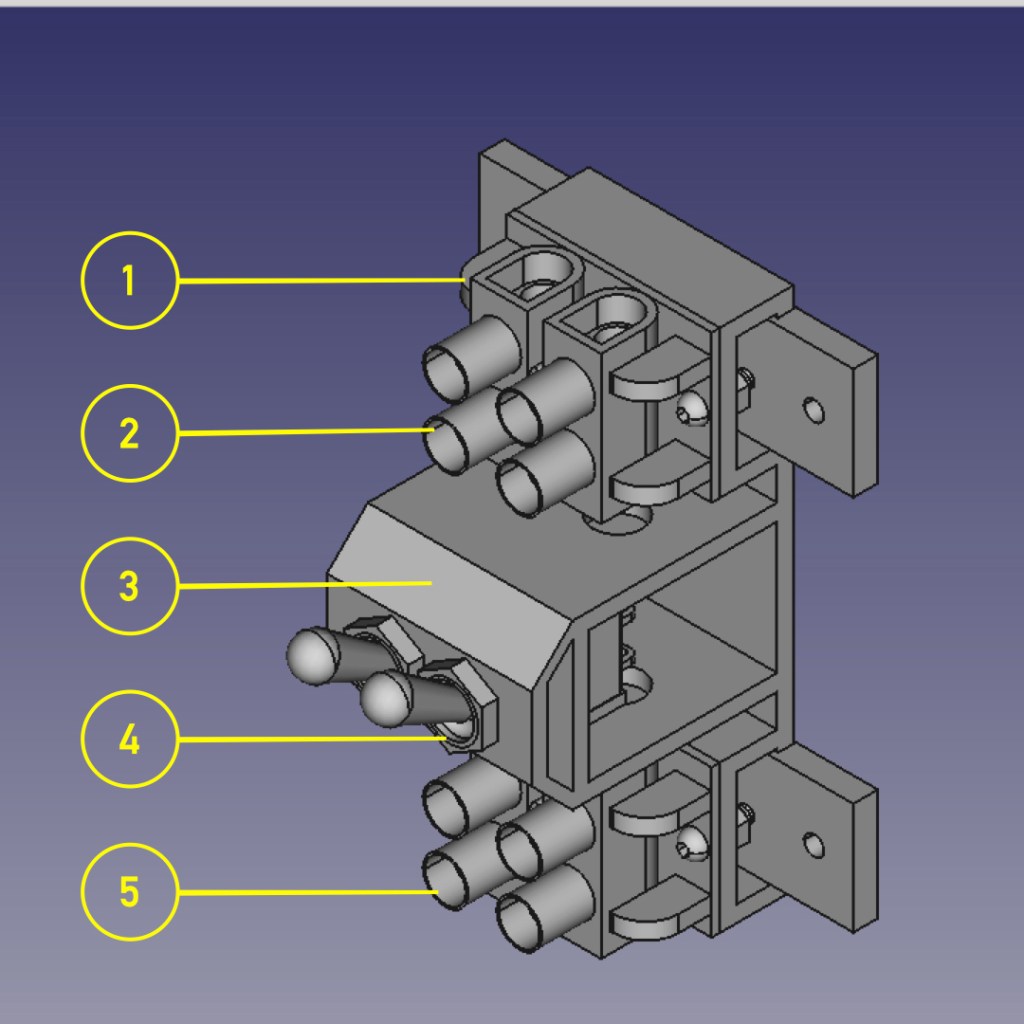
Screenshot 3 : Sectionneur – Aperçu 3/4 face
Screenshot 4 : Sectionneur – Aperçu 3/4 arrière
Présentation générale
Le sectionneur de l’armoire de distribution électrique permet d’isoler le réseau électrique desservi par l’armoire, de l’alimentation en énergie électrique.
Description détaillée
Screenshot 3
Guide de fixation des borniers de câblage
Bornier de câblage d’entrée réalisé à partir d’un domino électrique 230V 1,5mm2.
Structure de montage du sectionneur réalisée par impression 3D.
Deux interrupteurs à bascule comme sectionneur coupe circuit.
Bornier de câblage de sortie réalisé à partir d’un domino électrique 230V 1,5mm2.
Screenshot 4
Patte de fixation du module sectionneur sur la structure interne de l’armoire électrique.
Structure du module sectionneur réalisé par impression 3D.
Perforation pour faciliter le montage des borniers de câblage.
Modélisation 3D du porte fusible des armoires électriques du diorama
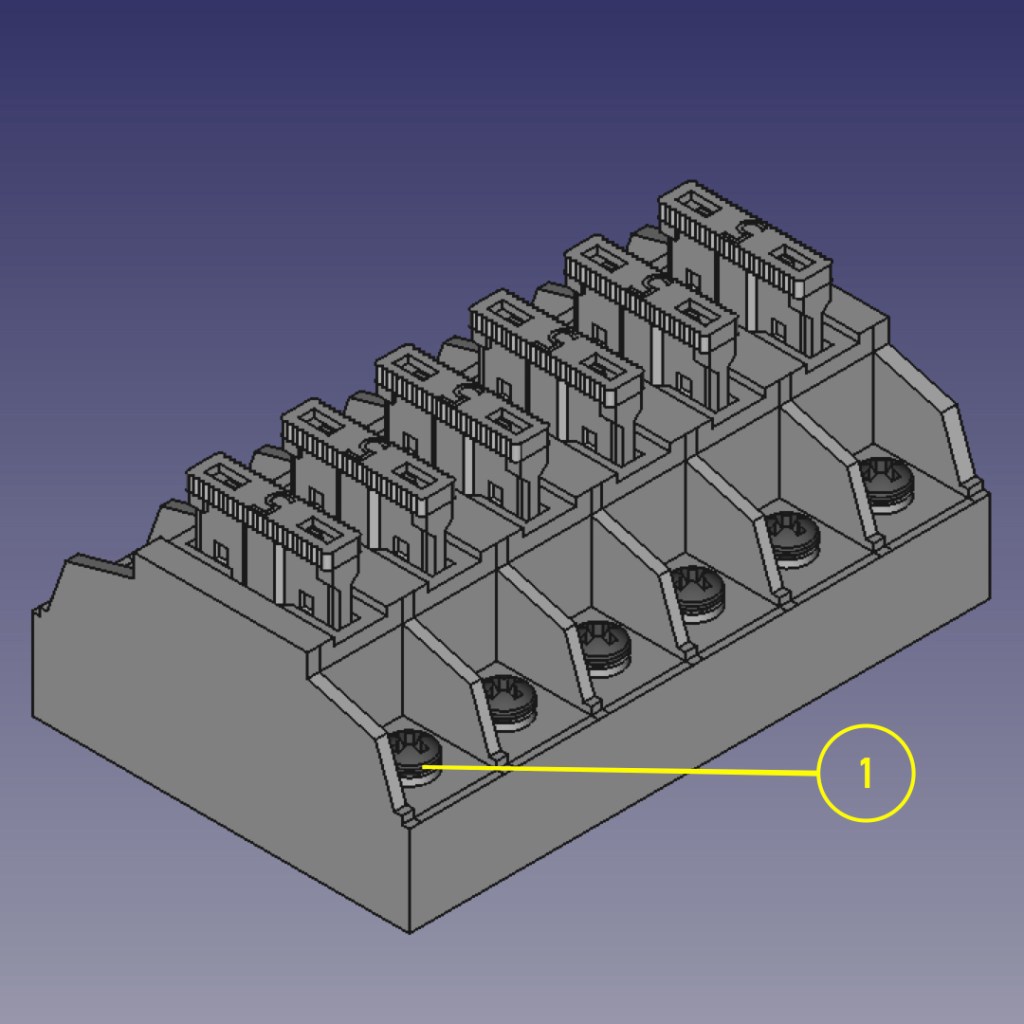
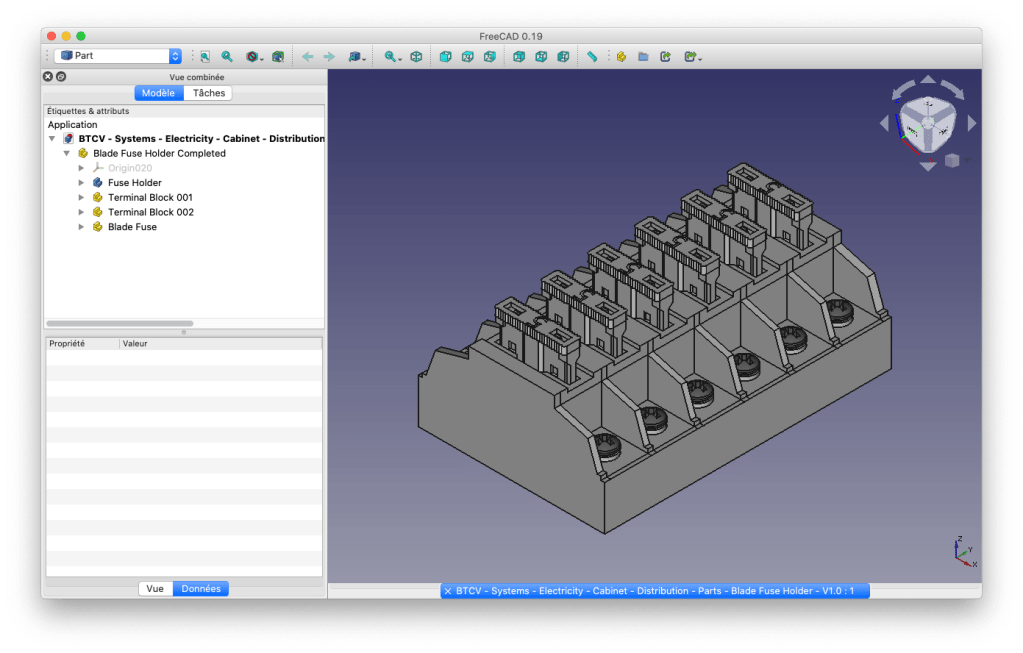
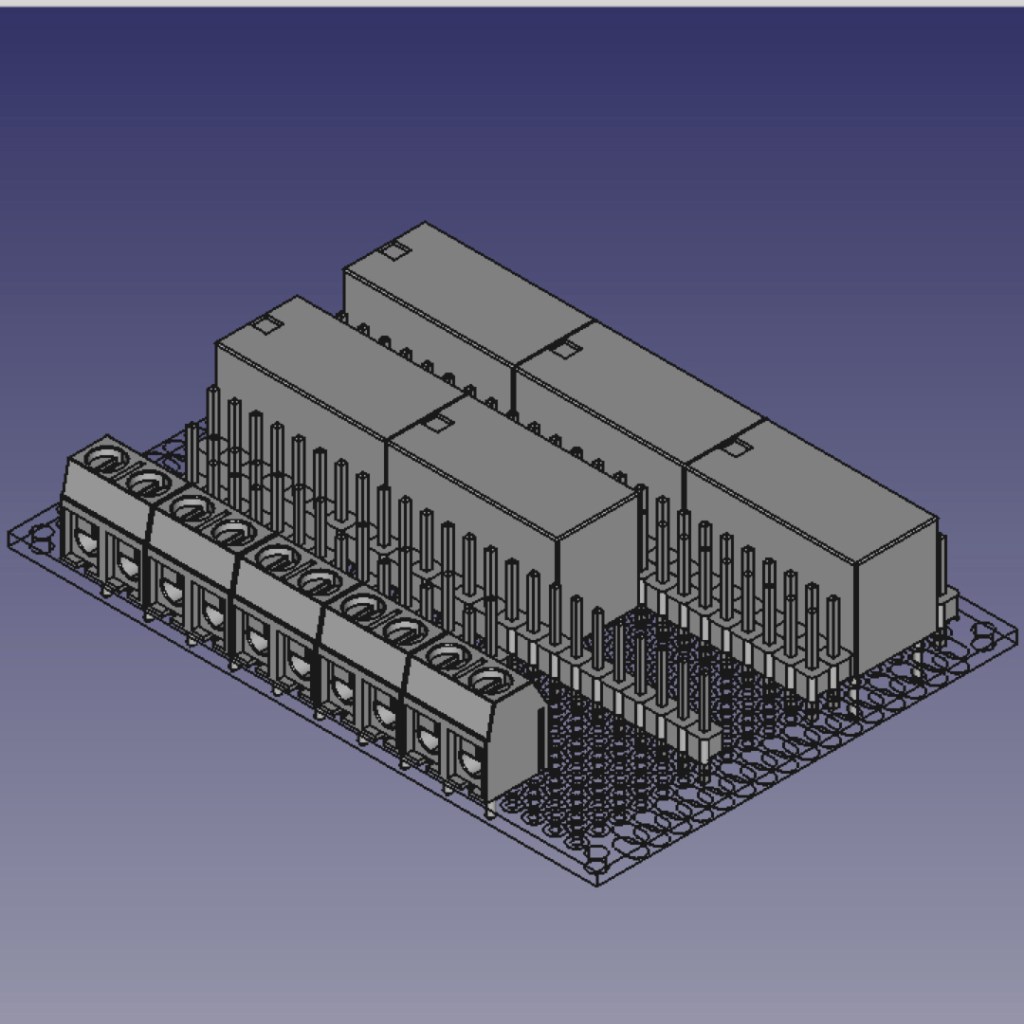
Screenshot 5 : Porte fusible – Aperçu 3/4 face
Screenshot 6 : Porte fusible – Aperçu 3/4 face
Présentation générale
Les fusibles protègent les circuits électriques contre les surintensités. Pour protéger les 6 circuits de sorties de l’armoire de distribution, 6 portes fusibles sont donc nécessaires. Cependant, pour des raisons d’encombrement de ces portes fusibles et pour s’assurer que le câblage associé soit simple, la solution retenue repose sur un porte fusible intégré de 6 fusibles plats.
Description détaillée
Screenshot 5
Borniers de câblage des bornes positives des circuits.
Fusibles plats.
Screenshot 6
Borniers de câblage des bornes négatives des circuits.
Modélisation 3D des composants de l’armoire électrique avec FreeCAD
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
Un aperçu de quelques designs complémentaires conçus spécifiquement pour les besoins du projet BATLab112.
GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception détaillée, afin de valider les assemblages mécaniques entre ces différents sous-ensembles.
Voir aussi
Des articles sur l’avancement du réseau de distribution électrique du diorama
Le diorama du projet BATLab112 est développé sur fond propre. En 2018, lorsque j’ai cherché un logiciel de conception et de modélisation 3D , il n’était pas envisageable d’investir sur des logiciels tels que SolidWorks ou AutoCAD. J’ai ainsi orienté mes recherches du côté des logiciels libres de droit en espérant trouver une solution fiable et performante. Un autre paramètre déterminant pour moi, utilisateur quotidien d’ordinateur Apple, ce logiciel devait fonctionner sous MacOS.
Une communauté active.
Mes premiers critères de sélection dans le choix d’un logiciel libre sont le dynamisme de sa communauté de développement ainsi que la pertinence technique des mises à jour. Concernant le dynamisme de la communauté FreeCAD le contenu du site web officiel : https://www.freecadweb.org est suffisant pour ce faire une idée ; les dernières informations sont récentes et le forum très réactif. Pour ce qui est de la pertinence des mises à jours; la page wikipedia https://fr.wikipedia.org/wiki/FreeCAD#cite_note-0.19-73 listant et détaillant ces mises à jour est là aussi suffisante. Elles sont régulières et apportent de réelles plus-values.
Un premier contact satisfaisant.
Au début de l’année 2018, je télécharge la version 0.16 de FreeCAD. A l’aide de quelques tutoriels, je me familiarise vite avec son ergonomie, après avoir compris l’essentiel dans son processus de conception : objet, esquisse, … Le diorama du projet BATLab112 commence alors à prendre forme.
Des caractéristiques intéressantes.
Comme évoqué, je ne voulais pas me satisfaire d’un logiciel juste parce que ce dernier est gratuit. Mais, je ne voulais pas non plus me laisser séduire par un logiciel facile à prendre en main et dont je serai vite soumis à ses limites. FreeCAD est un logiciel de conception en 3D volumétrique paramétrique. Ce n’est certes pas le plus simple d’utilisation des logiciels de CAO 3D gratuits, cependant il est certainement parmi les plus performants de sa catégorie. Après quatre ans d’utilisation au service du projet BATLab112, je n’ai encore pas sentis de limites dans ses capacités techniques.
Quelques fonctionnalités intéressantes
Autres que les fonctions conventionnelles que l’on peut attendre d’un logiciel de conception 3D, voici une liste de quelques fonctionnalités que j’ai particulièrement appréciées à l’usage.
Le module de dessin industriel, autorisant des plans avec cotations
Le mode d’affichage « vue en perspective » pour un rendu plus réaliste
L’introduction de cette nouvelle séries d’articles dédiée à l’utilisation de FreeCAD dans le projet BATLab112 est l’occasion de revenir sur les débuts du projet.
Dès les premiers instants du projet BATLab112, la nécessité d’utiliser un logiciel de conception 3D s’est avéré indispensable. Je n’avais pas une idée précise de l’apparence final du diorama. J’en avais défini les grandes lignes ; réalisme dans la représentation et fonctionnement opérationnel des équipements industriels, approche pédagogique évolutive dans l’appréhension de ces équipements. Même si la définition générale du projet n’était pas encore aboutie j’avais besoin de rendre plus concrètes certaines idées.
Un double intérêt
L’autre objectif, consistait à remettre à jour mes compétences dans l’utilisation d’un logiciel de CAO 3D. Ma dernière expérience professionnelle dans le domaine remontait à quelques années déjà avec la version Lite du logiciel AutoCAD édité par AUTODESK.
Des avantages mesurables
Pour être honnête je dois quand même avouer que ma volonté d’utiliser un logiciel de CAO 3D à d’abord été dictée par mon objectif de compétence professionnelle. En effet, dans la phase d’incubation du projet, j’ai visionné beaucoup de vidéos de tutoriels ou de démonstration de fabrication à la main de systèmes électromécaniques. Les principes de montage reposent pour beaucoup sur le collage à chaud de pièces de cartons, de bois ou de métal. Ces vidéos me fascinent toujours par la sensation de facilité et de rapidité d’exécution qu’elles dégagent. Elles m’ont amenés à me tester sur leurs pratiques. Pour cela nul besoin de logiciel de conception ! Mais j’ai très vite compris les limites de telles pratiques. Le manque d’anticipation dans la conception entraîne immanquablement des erreurs qui oblige souvent à recommencer, entraînant une perte de temps et un gâchis de matière. De plus, modifier ou démonter ces réalisations étant impossibles ou du moins très fastidieux, cela amplifie encore la tendance au gaspillage. C’est à ce moment que j’ai compris quelles sont les réels avantages d’un logiciel comme FreeCAD pour le projet : une conception réfléchie, anticipant des erreurs de perception et évitant ainsi des impasses et économisant du temps, tout en élaborant des systèmes complexes sans consommer de matières.
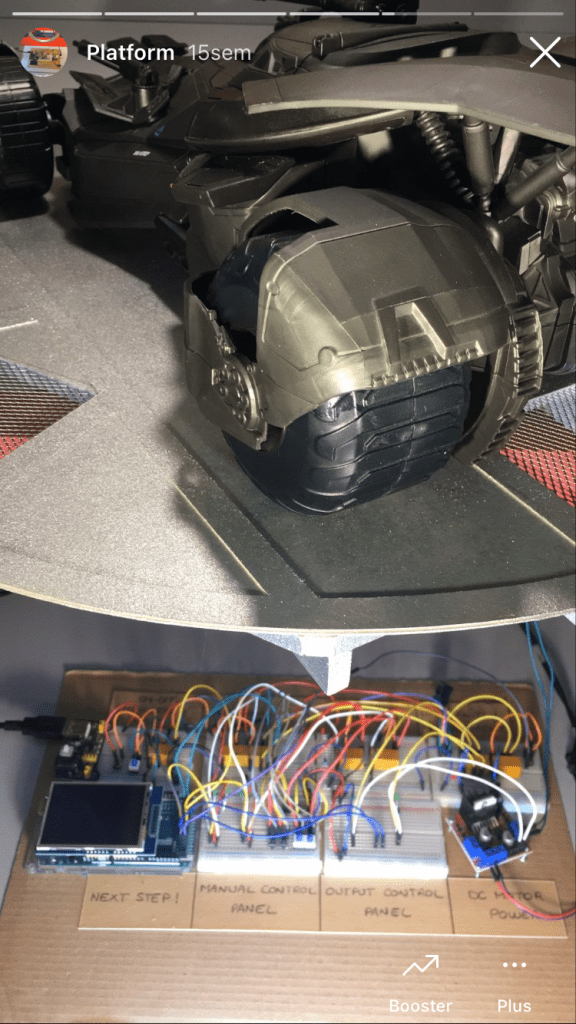
Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.
Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
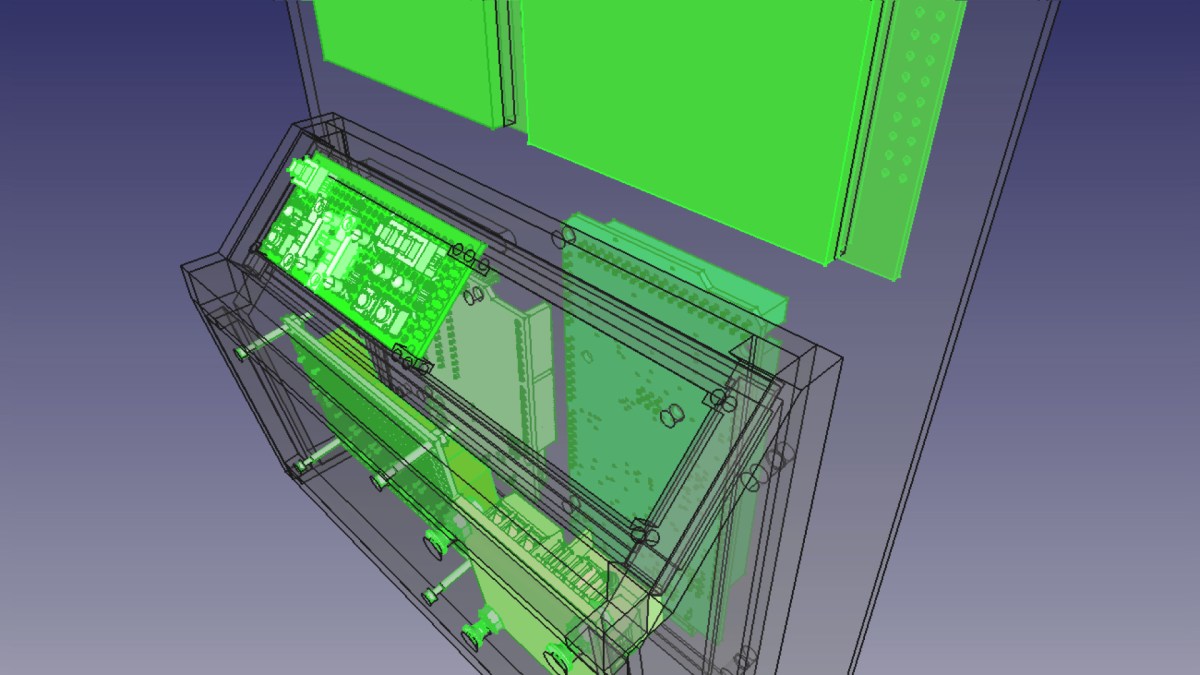
Cartes électroniques de puissance
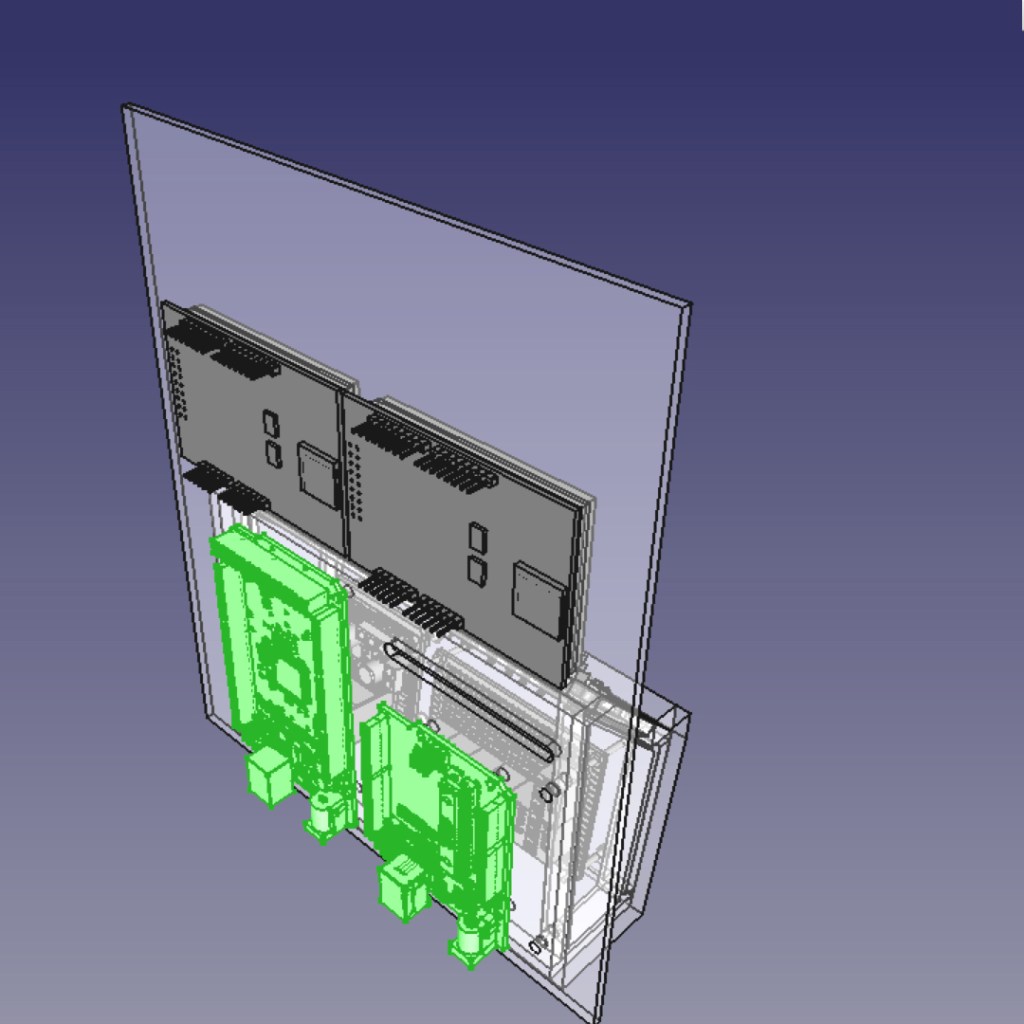
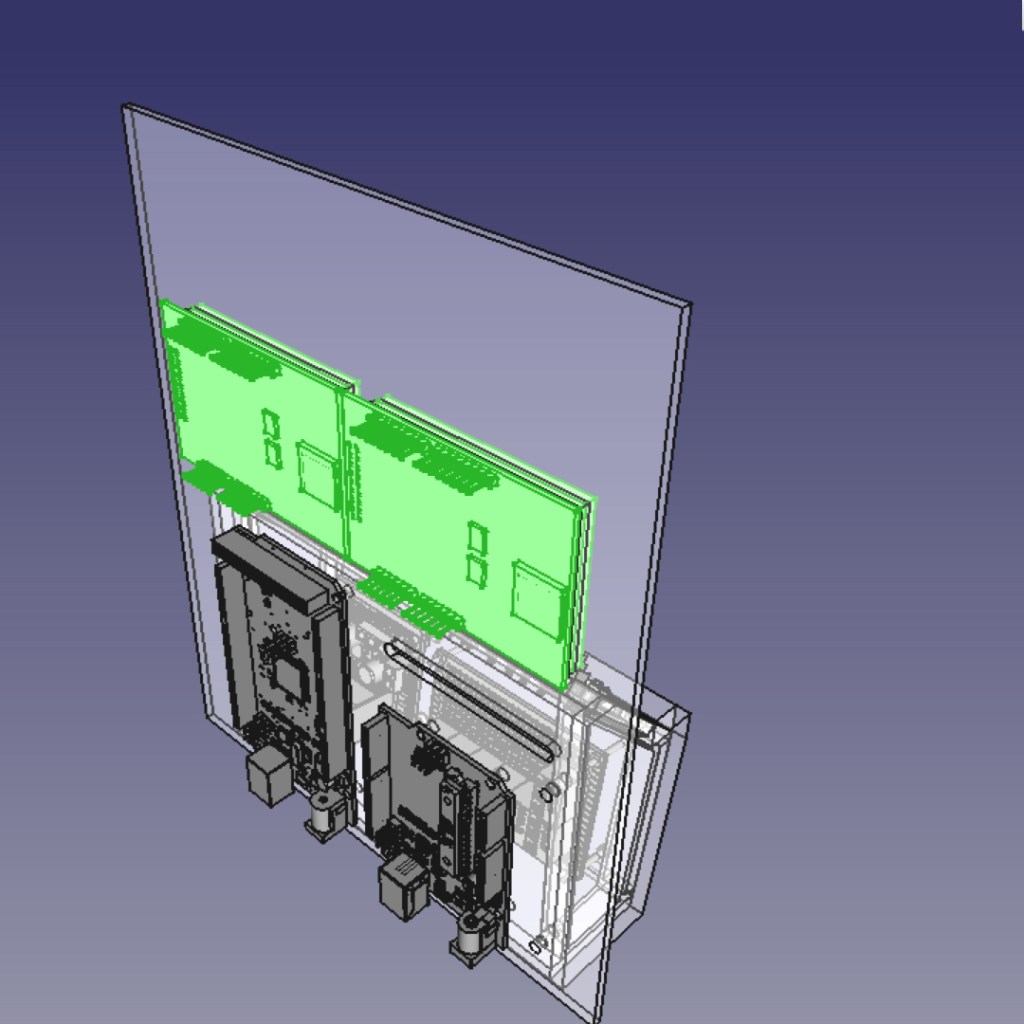
Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
Cartes Arduino
Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
Panneau des commandes
La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
Ecrans de contrôle
Modélisation 3D
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.
La réalisation du diorama technique du projet BATLab112 requiert la mise en œuvre d’une infrastructure de commande fiable, didactique et cohérente avec les fonctions attendues du dispositif final. La console de commande, élément central de l’interface opérateur, constitue à ce titre un module critique. Elle assure l’articulation entre les commandes manuelles, les systèmes d’automatisation futurs et l’ensemble des actionneurs mécaniques, notamment le moteur de la plateforme rotative.
Après validation du concept mécanique de la console et de l’agencement des composants électroniques (écrans, boutons, commutateurs, microcontrôleurs), une première étape de prototypage électronique a été entreprise. L’objectif de cette phase est de vérifier la pertinence des choix techniques, d’évaluer l’ergonomie des modes de commande et de valider les comportements fonctionnels avant passage à une intégration définitive.
Le présent document propose une description détaillée de cette première version électronique, de son architecture générale aux essais menés sur maquette, en adoptant une démarche rigoureuse conforme aux standards de conception en électronique appliquée.
+ d’infos sur la conception préliminaire de la console de commande :
La structure électronique de la console de commande repose sur un schéma de principe élaboré à l’aide du logiciel libre KiCad, choisi pour sa flexibilité, sa richesse fonctionnelle et sa compatibilité avec les environnements de prototypage rapide.
L’architecture est organisée en deux sous-systèmes principaux :
Le module de gestion des commandes manuelles, intégrant les commandes de l’opérateur (boutons, commutateurs, voyants).
Le module d’interface de puissance, assurant la mise en forme et la distribution des signaux vers le moteur à courant continu responsable de la rotation de la plateforme.
Cette séparation fonctionnelle répond à un impératif de lisibilité du schéma mais également à une logique de modularité favorisant les évolutions ultérieures.
KiCad
Ce schéma électronique est réalisé avec la suite logicielle KiCad distribuée librement.
La partie supérieure du schéma se divisent en 5 parties dédiées à la gestion des commandes. La partie inférieure du schéma est dédiée à l’interface entre les commandes et l’alimentation du moteur de rotation de la plateforme.
Mise sous tension – arrêt général
La mise sous tension générale est réalisée au moyen d’un relais à auto-maintien, solution fréquemment adoptée dans les environnements industriels.
Le principe consiste à maintenir l’alimentation du circuit tant que le relais reste excité, l’opérateur pouvant interrompre cette excitation via un bouton poussoir d’arrêt. Cette architecture garantit la sécurité fonctionnelle du dispositif tout en simplifiant le comportement de remise en service.
Sélection du mode Auto / Manuel
Un commutateur à deux positions permet de choisir entre un mode automatique et un mode manuel. Ce choix conditionne la provenance des signaux de commande :
En mode manuel, les boutons opérateur commandent directement les relais gérant le sens de rotation.
En mode automatique, ces mêmes relais sont pilotés par l’unité d’automatisation (qui sera intégrée dans une phase ultérieure du projet).
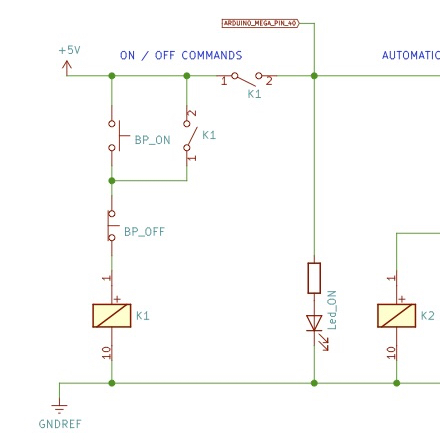
BP_ON : Bouton poussoir de commande du relais K1
K1 : Relais dont un contact est utilisé pour assurer son auto-maintien. Le deuxième contact est utilisé pour mettre sous tension tout le reste du montage.
BP_OFF : Bouton poussoir de coupure de l’alimentation du relais K1.
Led_ON : Led dont l’allumage dépend du deuxième contact du relais K1.
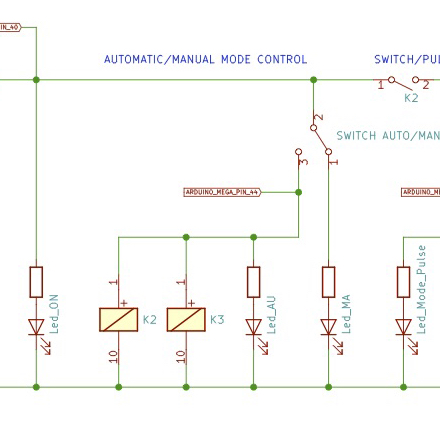
SWITCH AUTO/MAN : Commutateur permettant d’alimenter soit les relais K2, K3 et la Led Led_AU, soit la Led Led_MA seule.
K2 : Relais dont un des contacts autorise la mise sous tension de la suite du montage.
K3 : Relais dont les contacts aiguilles vers l’interface de puissance du moteur, les commandes manuelles ou les commandes automatiques.
Led_AU : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position AUTO.
Led_MA : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position MAN.
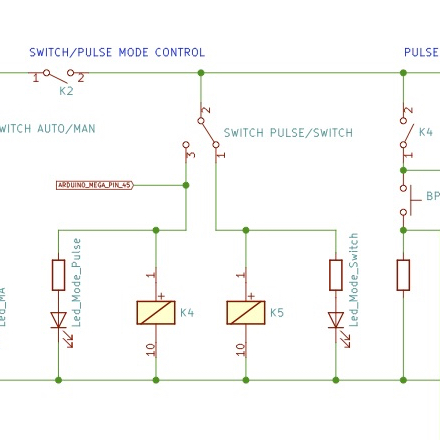
Sélection du mode Switch / Pulse
La sélection entre le mode switch et le mode pulse est assurée par un commutateur à 2 positions.
SWITCH PULSE/SWITCH : Commutateur permettant d’alimenter soit K4 et Led_Pulse, soit K5 et Led_Switch.
K4 : Relais dont un contact va autoriser les commandes manuelles en mode pulse.
K5 : Relais dont un contact va autoriser les commandes manuelles en mode switch.
Led_Pulse : Led dont l’allumage est commandé par le commutateur en position Pulse.
Led_Switch : Led dont l’allumage est commandé par le commutateur en position Switch.
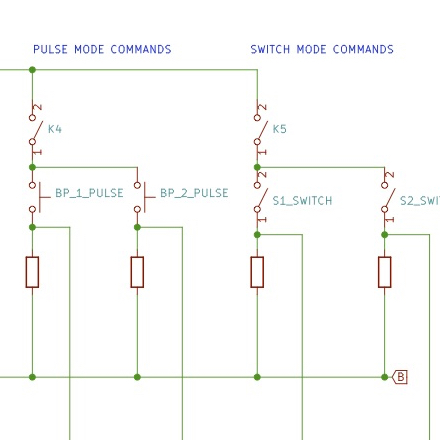
Switch & Pulse Commands
Les commandes manuelles en mode pulse sont assurées par des boutons poussoirs classiques. Il est nécessaire de maintenir l’appui sur le bouton poussoir maintenir la commande.
Les commandes manuelles en mode switch sont assurées par des boutons poussoirs à maintien de position. un premier appui bloque le bouton poussoir en position pour activer la commande. Un second appui, libère la position du bouton poussoir est arrête la commande.
PB1_PULSE: Bouton poussoir de commande de la rotation du moteur dans un sens.
PB2_PULSE : Bouton poussoir de commande de la rotation du moteur dans l’autre sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans un sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans l’autre sens.
Controller commands
Les contacts du relais K3 permettent d’aiguiller vers le moteur, soit les signaux des commandes manuelles soit ceux des commandes automatiques.
LED_R1 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
LED_R2 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
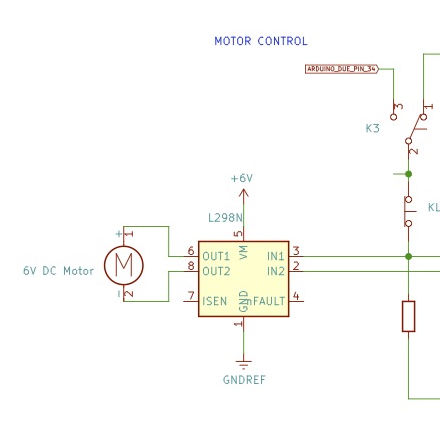
DC Motor controller
L’interface de puissance qui assure le pilotage du sens de rotation du moteur à partir des signaux de commandes numériques manuelles ou automatiques est une carte électronique basée sur un L298N.
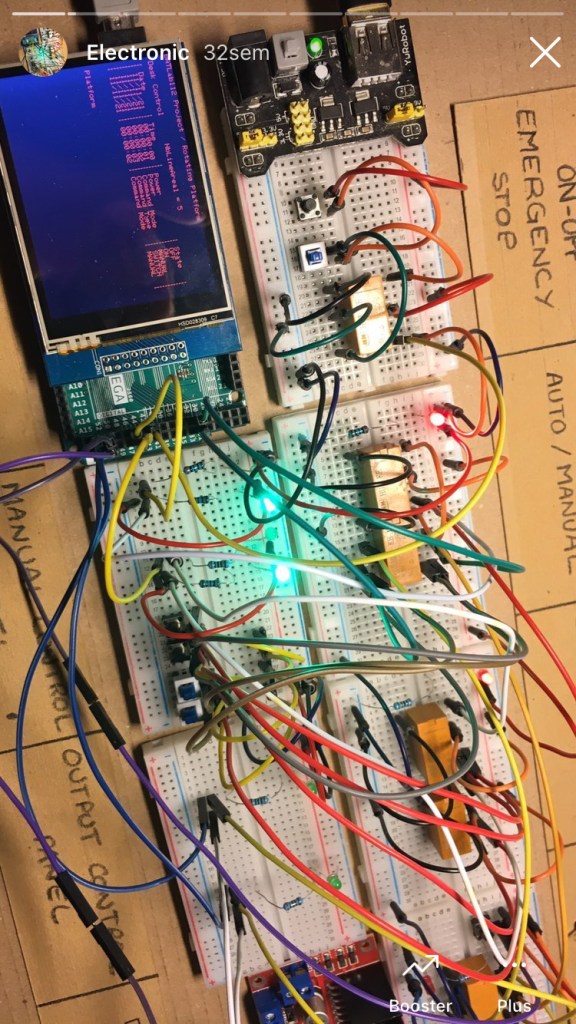
Maquette
Afin de valider ces choix, une maquette physique du circuit a été réalisée. Le câblage sur plaque expérimentale (protoboard) a permis :
de vérifier la cohérence des connexions ;
de confirmer la compatibilité électrique entre les éléments ;
d’effectuer une série de tests fonctionnels (mise sous tension, bascules de modes, commandes moteurs).
Cette démarche de prototypage intermédiaire est conforme aux bonnes pratiques de l’ingénierie électronique, permettant de déceler d’éventuelles incohérences avant la production d’un circuit imprimé ou l’intégration dans l’environnement mécanique définitif.
Test de fonctionnement
Cartes électroniques
Conclusion
Cette première itération électronique de la console de commande du diorama BATLab112 constitue une étape structurante du projet. Elle permet de valider l’ensemble des fonctions de base : gestion de la mise sous tension, sélection des différents modes de commande, pilotage du moteur de la plateforme rotative et évaluation de l’ergonomie opérateur.
L’architecture modulaire mise en place offre une marge significative pour les développements ultérieurs, notamment :
l’intégration d’un système de contrôle automatisé basé sur Arduino ou équivalent,
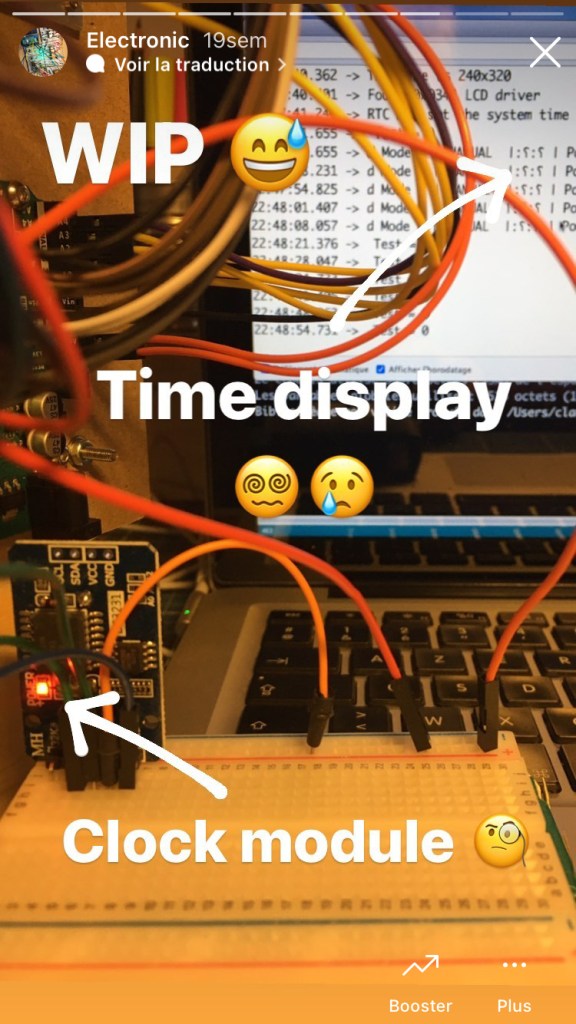
la mise en place d’un affichage en temps réel via un écran TFT 2,8’’,
la migration vers un câblage définitif en adéquation avec les contraintes mécaniques du diorama.
En ce sens, ce prototype représente un jalon essentiel dans la transition entre la conception préliminaire et la validation fonctionnelle du dispositif final, illustrant une démarche académique structurée et reproductible.
La conception préliminaire de la plateforme rotative fait suite à la phase d’étude des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
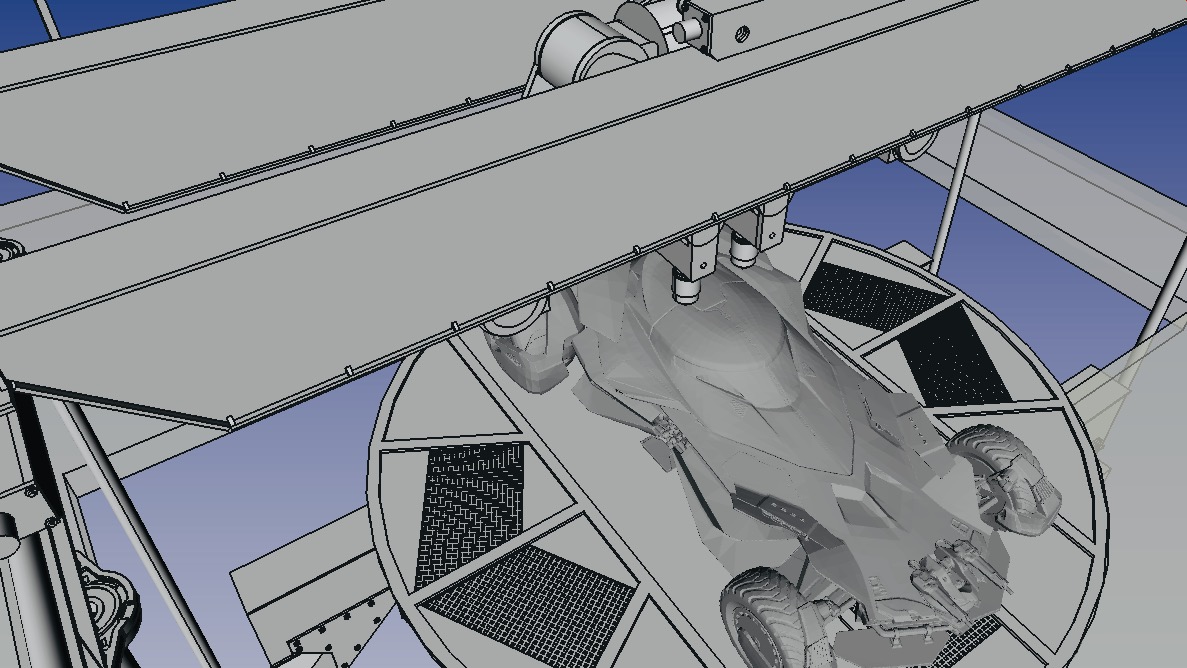
Vue générale
Le concept du pont élévateur bipoutre 4 colonnes est l’association de deux concepts industriels, le pont élévateur 4 colonnes et le pont suspendu bipoutre. Les deux poutres se déplacent selon un axe vertical grâce aux actions synchronisées des 4 colonnes de levage. Chaque poutre est entrainée par 2 colonnes en vis-à-vis.
Dimensionnement
Le pont élévateur doit être en capacité de soulever la Batmobile dont la masse du modèle le plus lourd est de 3000 kg, ainsi que la plateforme rotative. dont la masse reste inférieure à 2000 kg. En prenant en compte un coefficient de sécurité et compte-tenu des normes en terme de capacité de levage constatée, le pont élévateur pris en référence pour le projet BATLab112 aura donc une capacité de levage d’environ 5 tonnes.
Design
Pour satisfaire aux objectifs de réalisme d’un diorama pédagogique, les designs des systèmes industriels de l’atelier du projet BATLab112 sont inspirés de designs de systèmes existants. Celui des poutres du pont élévateur 4 colonnes est inspiré de système tel que celui présenté dans la photo ci-contre.
Vues de détails
Modélisation 3D
FreeCAD
La modélisation du pont élévateur de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du pont élévateur équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
L’article présente la conception détaillée et la réalisation du premier prototype fonctionnel du poste électrique HT/BT à l’échelle 1/12 pour le diorama pédagogique de la Batcave du projet BATLab112. Il s’inscrit dans la phase de conception détaillée visant à reproduire avec fidélité les fonctions d’un poste électrique industriel.… Lire la suite →
Cet article contient des références à des marques commerciales. Ceci n’est en aucun cas un placement de produit ou de la publicité. Ces produits sont cités au titre de la référence qu’ils représentent dans la recherche de solutions techniques dans le contexte du projet BATLab112.
Contexte et objectifs du projet BATLab112
Ce premier prototype fonctionnel du poste électrique de la Batcave du projet BATLab112, a été réalisé suite à sa conception préliminaire, essentiellement destinée à modéliser les enveloppes mécaniques des différents éléments le composant.
La conception détaillée du poste électrique de la Batcave s’inscrit dans l’objectif de réalisme poursuivi par le projet BATLab112 à des fins pédagogiques. À ce titre, les choix de conception opérés visent à reproduire avec la plus grande fidélité possible le fonctionnement de chacun des éléments constitutifs de ce poste électrique, tant sur le plan fonctionnel que didactique.
Les photographies présentées dans cet article illustrent le prototype du poste HT/BT dans son état initial, antérieur à la phase de reprise du design extérieur, engagée en vue d’améliorer le rendu visuel et la cohérence esthétique de l’ensemble.
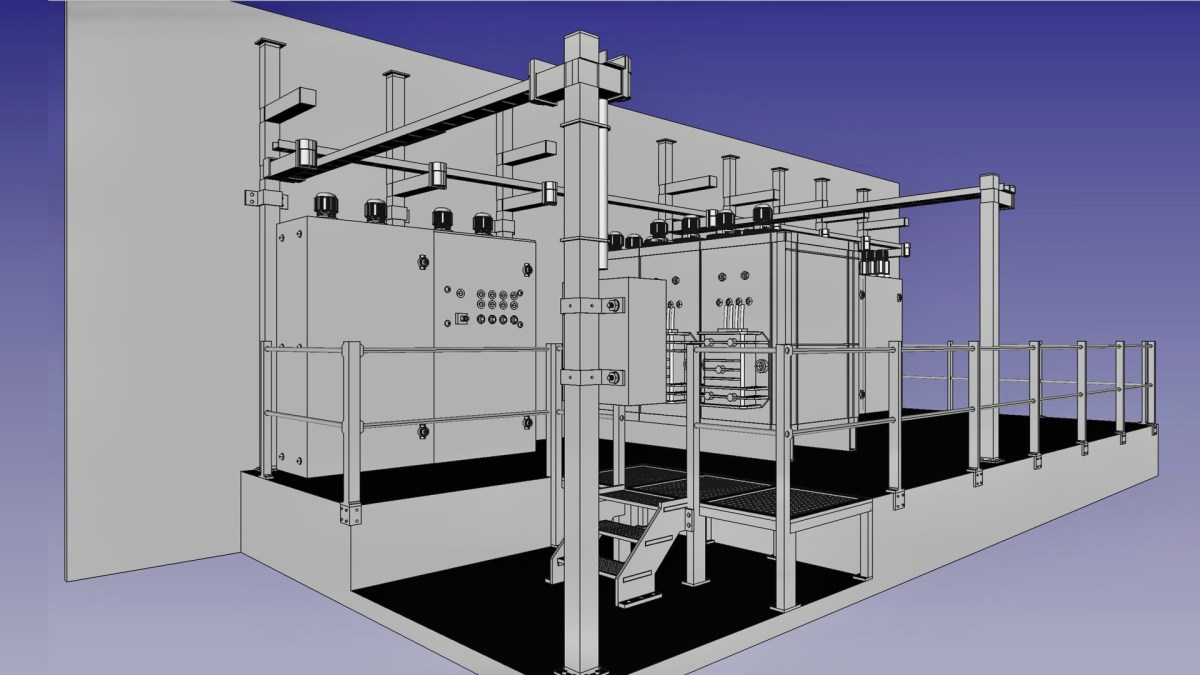
Présentation Générale du Poste Électrique à l’Échelle 1/12
L’architecture du poste électrique du diorama de la Batcave, dans le cadre du projet BATLab112, s’inspire directement de l’organisation conventionnelle d’un poste électrique industriel réel, identifiée lors de la phase de parangonnage des systèmes existants.
L’armoire de raccordement électrique constitue l’interface entre l’alimentation fournie par le réseau — représentée, dans le cadre du diorama, par une prise 230 VAC 50 Hz — et le réseau électrique interne du diorama. Cette armoire intègre un sectionneur interne permettant d’isoler complètement le réseau du diorama, assurant ainsi une sécurité fonctionnelle et opérationnelle.
Le convertisseur de puissance, ou transformateur, est l’équipement chargé de la transformation de la tension alternative du secteur en tensions continues de basses valeurs, adaptées à l’alimentation des différents équipements du diorama. Quatre niveaux de basses tensions ont été définis en fonction des besoins spécifiques :
5 V DC : alimentation des composants électroniques tels que LED, boutons poussoirs et relais.
6 V DC : alimentation des petits moteurs du pont roulant et de la plateforme rotative.
12 V DC : alimentation des quatre moteurs du pont élévateur.
12 V DC secondaire : alimentation des équipements annexes du diorama, notamment l’éclairage.
L’armoire de commande des basses tensions est dotée d’un panneau de commande permettant de contrôler la mise en marche et l’arrêt de la distribution de ces tensions à l’ensemble du diorama. Sa conception reproduit fidèlement le fonctionnement d’un équipement industriel réel, y compris le principe de câblage basé sur des relais électromécaniques, offrant ainsi une expérience pédagogique complète et réaliste.
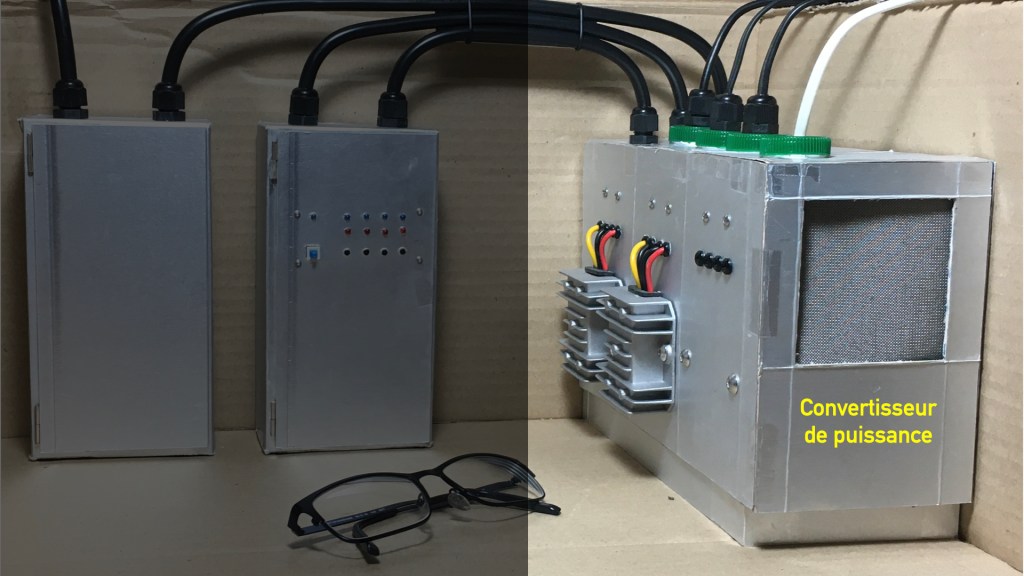
Conception et réalisation du convertisseur de puissance
Choix techniques et matériaux de fabrication
La structure interne de ce prototype de convertisseur de puissance est réalisée à partir de carton d’emballage de récupération, constituant une solution simple et fonctionnelle pour le support des composants. La structure externe, dédiée à la finition esthétique du convertisseur, est quant à elle conçue à partir de briques d’emballage alimentaire de jus de fruit, dont la face interne en aluminium contribue à la rigidité et à l’aspect visuel de l’ensemble.
Intégration des convertisseurs DC/DC
Ce premier prototype intègre deux convertisseurs DC/DC permettant de fournir des tensions de 5 VDC et de 6 VDC, répondant aux besoins actuels du projet. La réserve d’espace disponible au sein du boîtier autorise l’intégration ultérieure d’un convertisseur DC/DC supplémentaire, en fonction de l’évolution des exigences fonctionnelles du projet BATLab112.
Panneau basse tension : conception et fonctionnalités
Choix techniques et matériaux de fabrication
La structure interne du convertisseur de ce prototype du convertisseur de puissance est réalisé en carton. La structure externe, assurant la finition esthétique du convertisseur, est réalisée avec des briques d’emballage alimentaire (intérieur en aluminium).
Interface de commande et de signalisation
Le panneau de commande des basses tensions est conçu selon une organisation comparable à celle d’un panneau de commande industriel réel. Il est équipé de quatre boutons poussoirs permettant le pilotage des quatre niveaux de tension requis pour l’alimentation électrique des équipements industriels miniaturisés du diorama à l’échelle 1/12, à savoir le pont roulant, le pont élévateur, la plateforme tournante et les bras robotiques. Des voyants lumineux associés assurent la visualisation de l’état des commandes correspondantes, selon un fonctionnement binaire de type ON/OFF.
À l’instar des installations industrielles réelles, un bouton poussoir d’arrêt d’urgence est intégré au dispositif. Celui-ci permet l’interruption immédiate de l’alimentation électrique des quatre tensions, garantissant l’arrêt simultané de l’ensemble des équipements électriques du diorama.
Carte électronique support des boutons et voyants
La carte électronique intégrée à l’armoire de commande des basses tensions est équipée de quatre relais électromécaniques, permettant de reproduire fidèlement le fonctionnement d’un panneau de commande industriel réel. Le choix d’une commande par boutons poussoirs, fidèle à la réalité, nécessite la mise en œuvre d’un dispositif reposant sur des relais électromécaniques à double contact, assurant une fonction d’auto-maintien.
Chaque action sur un bouton poussoir alimente la bobine du relais correspondant, entraînant la fermeture d’un contact et le maintien de l’état de commande sans action continue de l’utilisateur. L’activation du bouton poussoir d’arrêt d’urgence provoque quant à elle la coupure de l’alimentation électrique des bobines de l’ensemble des relais, entraînant la désactivation simultanée de tous les dispositifs d’auto-maintien et l’arrêt immédiat des équipements commandés.
Sourcing
Schéma électrique de commande des relais avec auto-maintien
Optimisation du nombre de contact de commande
La recherche de composants, présentée dans le paragraphe précédent, met en évidence des relais dont la tension d’alimentation de la bobine est compatible avec la tension 12VDC de sortie du bloc d’alimentation de puissance, mais dont le nombre de contacts est limité à deux. Or, la mise en œuvre des fonctions d’auto-maintien, de commande de la tension de sortie et de pilotage d’une diode électroluminescente utilisée comme voyant de signalisation requiert la disponibilité de trois contacts distincts. Afin de satisfaire cette contrainte fonctionnelle, le schéma électrique proposé repose sur une architecture utilisant deux relais à deux contacts chacun, permettant d’atteindre le nombre de contacts de commande nécessaire.
Schéma électrique d’une commande à relais par auto-maintien
Les structures interne et externe de cette armoire de raccordement sont réalisées avec des briques d’emballage alimentaire de jus de fruit (intérieur en aluminium). Le module interne du sectionneur est réalisé en carton et en brique alimentaire.
Conception du sectionneur électrique
Le sectionneur est constitué de deux interrupteurs capables de supporter des tensions de 230 VAC, intégrés dans une enveloppe assurant à la fois une fonction de support mécanique et un rôle de sécurité, en empêchant l’accès direct aux contacts électriques sous tension. Le raccordement des tensions d’entrée et de sortie en 230 VAC est réalisé, dans ce prototype, à l’aide de dominos électriques. Bien que cette solution ne réponde pas pleinement aux exigences de sécurité relatives à la manipulation, elle présente l’avantage, dans le cadre du développement du prototype, de faciliter la réalisation de relevés de mesure des tensions.
Sourcing
Schéma électrique du sectionneur de l’armoire de raccordement
Principe de fonctionnement du sectionneur électrique du diorama
Le principe de fonctionnement du sectionneur repose sur l’établissement ou la rupture mécanique d’un chemin conducteur entre l’alimentation électrique et le circuit aval. Lorsque le sectionneur est en position fermée, ses contacts fixes et mobiles sont solidarisés, assurant la continuité électrique de l’ensemble des pôles et permettant l’acheminement de l’énergie vers les équipements raccordés.
En position ouverte, l’actionnement du mécanisme provoque l’écartement physique des contacts, créant une coupure visible et garantissant l’isolement électrique du circuit. Cette séparation, réalisée simultanément sur tous les pôles, empêche toute circulation de courant et autorise les opérations de maintenance en conditions de sécurité. Le sectionneur est conçu pour être manœuvré hors charge et pour maintenir de manière stable chacune de ses positions, conformément aux exigences de fiabilité et de sécurité imposées aux dispositifs d’isolement des installations électriques.
Schéma de câblage électrique du sectionneur principal du diorama
Les schémas électriques et électroniques du diorama de la Batcave, développé dans le cadre du projet BATLab112, sont réalisés à l’aide de la suite logicielle open source KiCad. Le recours à cet outil permet d’assurer une représentation rigoureuse et normalisée des schémas, en conformité avec les normes techniques en vigueur.
Si le revêtement réalisé à partir de briques d’emballage alimentaire permet d’envisager un rendu esthétique globalement satisfaisant, l’emploi de carton pour la structure interne s’est révélé inadapté. En effet, une fois l’ensemble des composants intégrés, la masse du convertisseur excède les capacités mécaniques du carton, entraînant des déformations lors des manipulations nécessaires au câblage interne. Au regard des dimensions de l’équipement, la réalisation de la structure interne en bois apparaît plus appropriée pour les versions ultérieures de ce convertisseur.
Par ailleurs, ce prototype est doté d’une grille d’aération en face avant. Néanmoins, la dissipation thermique liée à la chaleur dégagée par l’alimentation interne 230 VAC / 12 VDC devra faire l’objet d’une analyse plus approfondie, notamment lorsque celle-ci sera sollicitée pour alimenter l’ensemble des équipements électriques du diorama.
Armoire de raccordement
La réalisation des structures interne et externe à partir de briques d’emballage alimentaire ne permet pas d’assurer une rigidité suffisante de l’armoire lorsque celle-ci doit être raccordée à des câbles d’entrée et de sortie de type 3G2,5 afin d’être intégrée au diorama. Compte tenu des dimensions de l’équipement et des contraintes mécaniques associées, le recours à une impression 3D pour la fabrication de la structure interne de la prochaine version de cette armoire apparaît comme une solution plus adaptée.
Par ailleurs, la conception mécanique des charnières de la porte ne s’avère pas satisfaisante, tant du point de vue de la faisabilité technique que de la robustesse. L’intégration de dispositifs de fermeture, tels que des poignées assurant le maintien de la porte en position fermée, devra être prise en compte lors de la conception du prochain modèle de cette armoire.
Panneau Basse tension
Les observations formulées sont identiques à celles précédemment établies pour l’armoire de raccordement. En outre, la conception de la carte électronique supportant les boutons de commande et les voyants lumineux nécessite une révision approfondie, dans l’objectif d’en simplifier l’architecture, d’en améliorer la lisibilité fonctionnelle et d’en faciliter la mise en œuvre.
Voir aussi
Des articles sur l’avancement du réseau électrique du diorama
Des articles sur les modèles opérationnels et prototypes du diorama