
En rassemblant des technologies avancées, des équipements industriels et des dispositifs d’analyse dans un espace restreint, la Batcave apparaît comme un environnement technologique complet. Elle constitue à la fois une vitrine d’innovations et un site quasi-industriel où l’intégration, l’optimisation et l’interaction de systèmes complexes peuvent être observées dans un cadre narratif immersif.… Lire la suite…
Première publication :
Dernière mise à jour :
Temps de ecture :
Mots clés :
Un espace où la technologie fonde l’identité du héros
L’un des traits distinctifs fondamentaux de Batman réside dans l’absence totale de pouvoirs surnaturels. Son efficacité repose exclusivement sur son intelligence, sa capacité d’analyse et l’usage stratégique de technologies de pointe rendues accessibles par ses ressources financières considérables. Dans ce contexte, la Batcave occupe une place centrale : loin d’être un simple repaire secret, elle constitue un environnement hautement technologique pensé pour soutenir l’action du justicier et amplifier ses capacités humaines.
L’élément emblématique de cet univers demeure le Batcomputer, véritable symbole de la supériorité technologique de Batman. Ses représentations fictionnelles évoluent au fil des époques, épousant les progrès réels de l’informatique, depuis les premiers systèmes de calcul jusqu’aux dispositifs d’intelligence artificielle avancée. Autour de cet équipement central se déploie un ensemble d’outils technologiques — drones, systèmes de surveillance automatisés, robots d’assistance — qui témoignent de l’actualisation constante du dispositif technique de la Batcave. L’ensemble forme un écosystème technologique dynamique, continuellement renouvelé pour rester en phase avec les avancées contemporaines. Ce caractère évolutif contribue à maintenir l’univers de Batman à la fois crédible, actuel et narrativement stimulant.
Une vitrine technologique et un laboratoire d’intégration
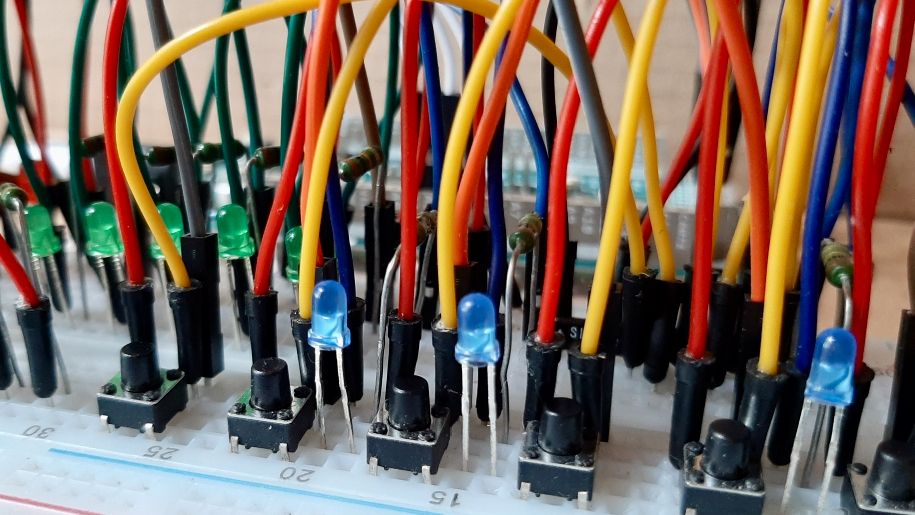
La concentration de technologies diverses au sein d’un même espace confère à la Batcave une dimension de véritable vitrine technologique. Chaque dispositif contribue à illustrer, sous une forme fictionnelle mais cohérente, un domaine particulier de l’innovation : informatique, robotique, systèmes embarqués, automatisation, communication, analyse de données, etc.
Cependant, la Batcave dépasse largement la fonction d’exposition. Elle constitue un environnement d’intégration où des technologies hétérogènes doivent coexister dans un milieu confiné, irrégulier et fortement contraint — celui d’une grotte naturelle. Les impératifs d’optimisation spatiale, d’ergonomie, de sécurité et d’efficacité opérationnelle imposent une ingénierie particulièrement sophistiquée. Cette configuration permet d’observer, même dans la fiction, les problématiques réelles que rencontrent les environnements techniques avancés : implantation des équipements, gestion énergétique, contrôle des systèmes, interactions homme–machine, compatibilité entre modules technologiques.
Un espace aux caractéristiques industrielles marquées
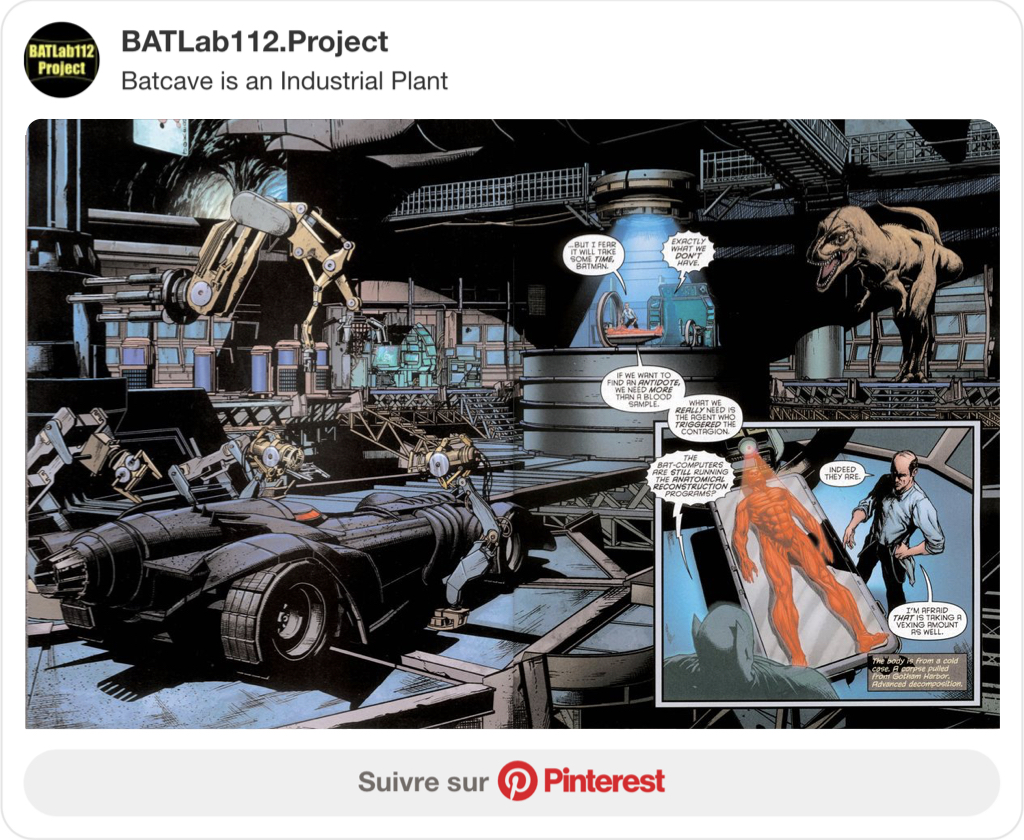
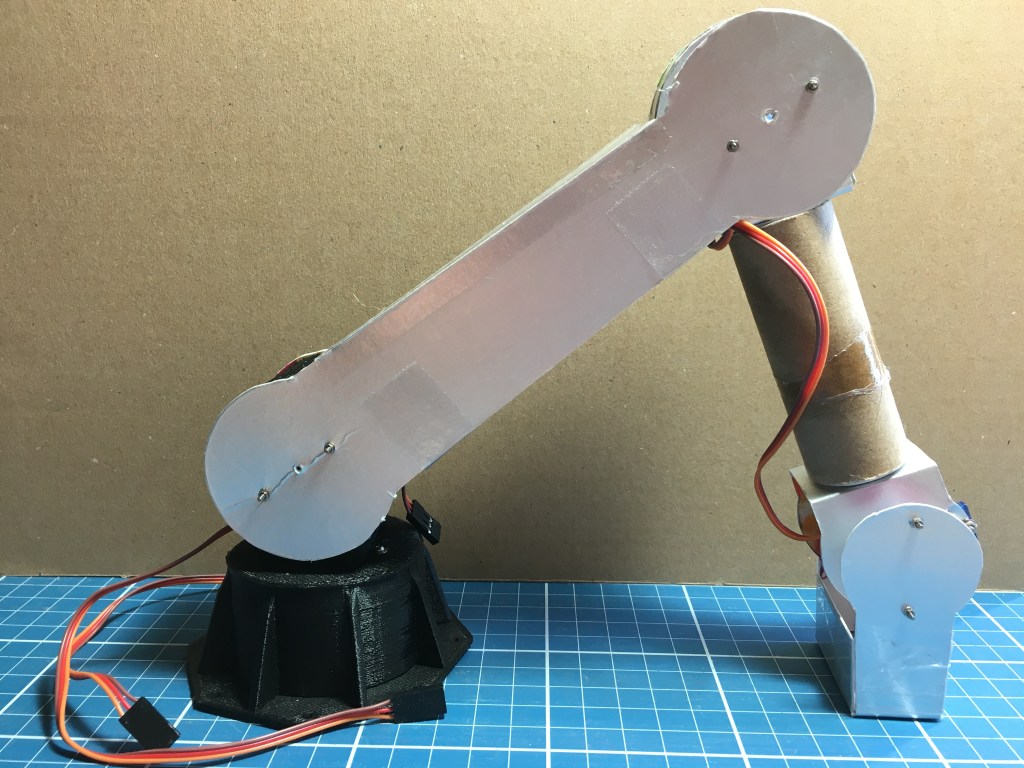
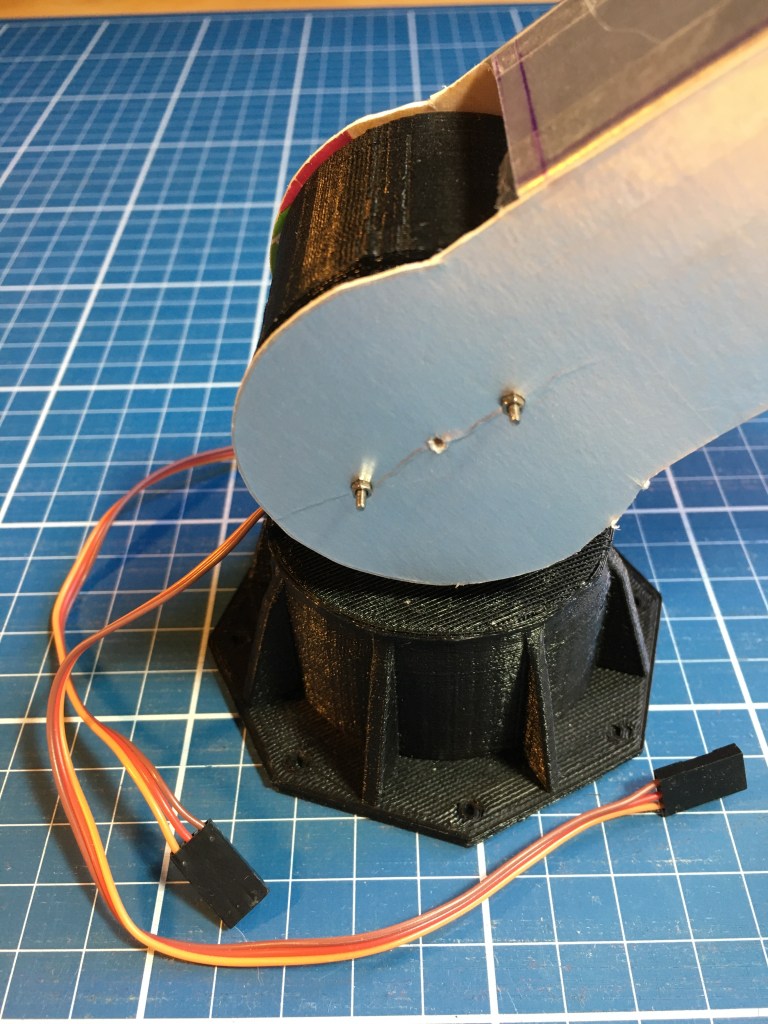
Au-delà des dispositifs informatiques et électroniques, la Batcave intègre également des équipements relevant de l’univers industriel. Les récits de Batman présentent ainsi des outils caractéristiques des ateliers de production ou des sites de maintenance : bras robotiques, plateformes tournantes, ponts roulants, stations de réparation et de diagnostic, infrastructures de levage ou de manutention. Ces dispositifs ne relèvent pas uniquement de l’imaginaire : ils répondent à des besoins fonctionnels liés à la construction, à la modification et à la maintenance de nombreux véhicules et équipements du héros.
À ce titre, la Batcave peut être appréhendée comme un véritable site industriel miniaturisé, où coexistent une pluralité de machines, d’outils et de systèmes autonomes dans un espace extrêmement restreint. Cette caractéristique accentue la complexité des interactions techniques et met en lumière les enjeux d’organisation, de synchronisation des activités et de gestion des risques.
Un décor ludique pour comprendre l’interaction des technologies
L’intérêt principal de la Batcave réside dès lors dans sa capacité à offrir, sous une forme narrative et ludique, une représentation densifiée de l’univers technologique contemporain. En concentrant dans un même lieu des technologies issues de domaines variés et en les insérant dans un environnement spatialement et physiquement contraint, la Batcave constitue un modèle pertinent pour appréhender les défis de l’ingénierie intégrée. Elle permet d’illustrer la complexité des chaînes technologiques, leurs interdépendances et les impératifs de performance globale qui en découlent.
En ce sens, la Batcave n’est pas seulement un décor emblématique : elle fonctionne comme un environnement technologique complet, où convergent innovation, ingénierie et mise en œuvre opérationnelle. Cet espace fictif offre ainsi un cadre particulièrement fécond pour réfléchir à l’articulation des technologies et à la manière dont elles cohabitent, se complètent et se renforcent mutuellement au service d’un objectif unique.
Voir aussi
Fil de lecture : La genèse du projet BATLab112

Un diorama comme support pédagogique – Immersion et apprentissage avec BATLab112
Le diorama pédagogique offre une représentation réaliste et immersive de systèmes complexes.…
Voir la suite …
La Batcave comme support technologique et pédagogique immersif du projet BATLab112
En rassemblant des technologies avancées, des équipements industriels et des dispositifs d’analyse…
Voir la suite …
Comment choisir l’échelle pour un diorama – Guide pratique des échelles de modélisme miniature
Le choix de l’échelle de fabrication est structurant pour le projet BATLab112.…
Voir la suite …
Pourquoi choisir l’échelle 1/12 pour un diorama – Perspectives d’intégration et réalisme détaillé
L’échelle 1:12 offre des perspectives d’intégration d’automatismes élaborés, un rendu réaliste, et…
Voir la suite …
Définition du modèle de la Batmobile pour le diorama du projet BATLab112
Bien que l’échelle de réalisation du diorama soit déjà fixée, les variations…
Voir la suite …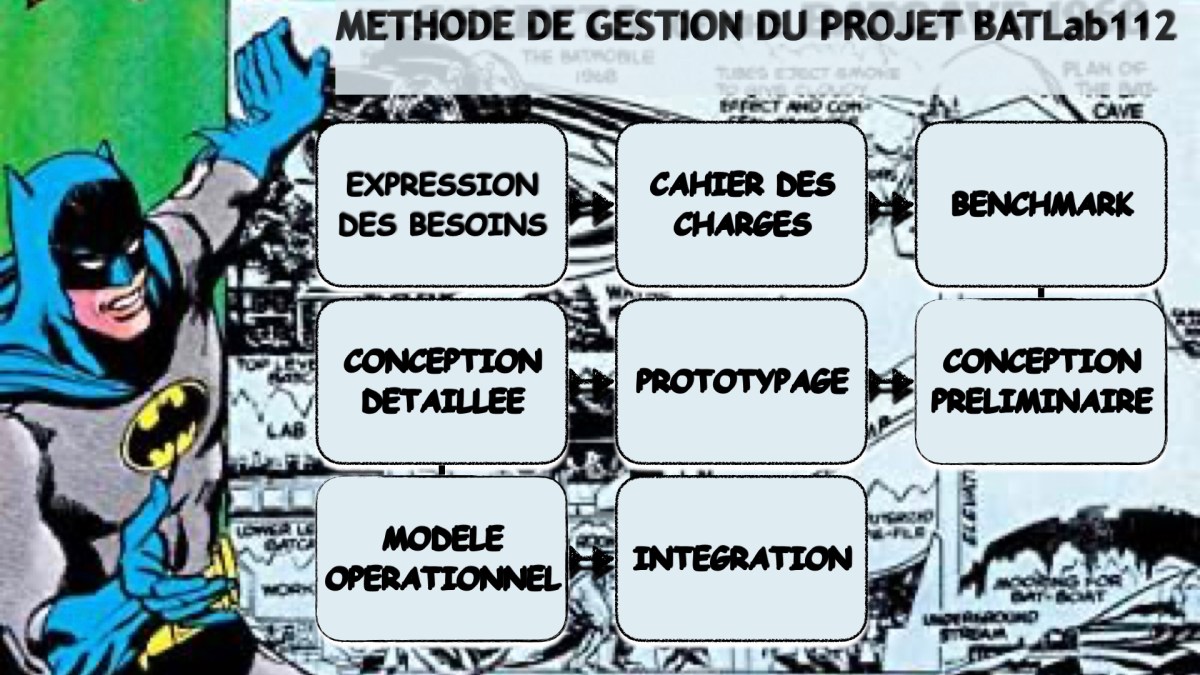
La gestion du projet BATLab112
Le développement du projet BATLab112 est l’occasion d’une première approche pédagogique de…
Voir la suite …Le diorama pédagogique du projet BATLab112












{kind=link}