Categorie :
Légende :
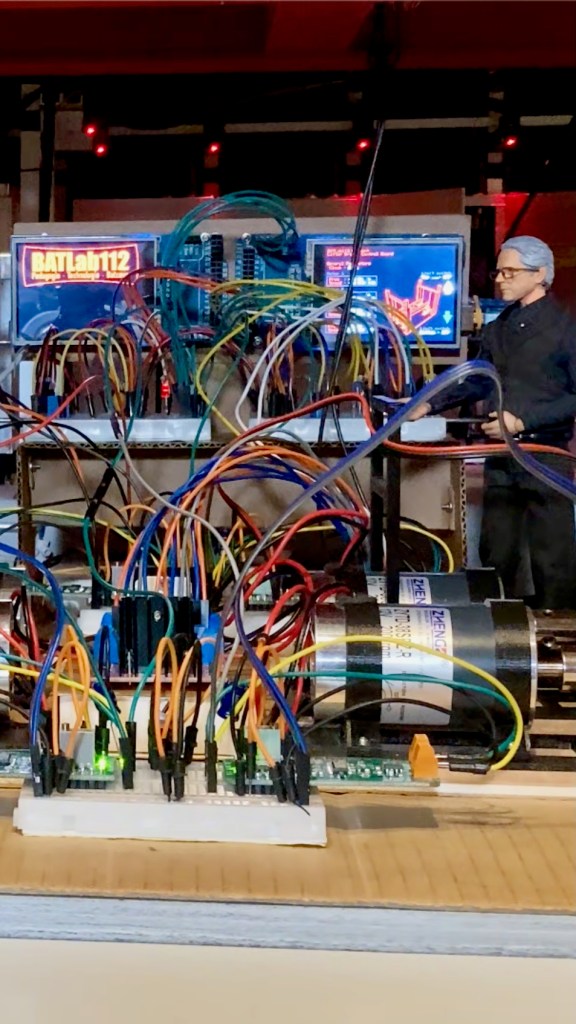
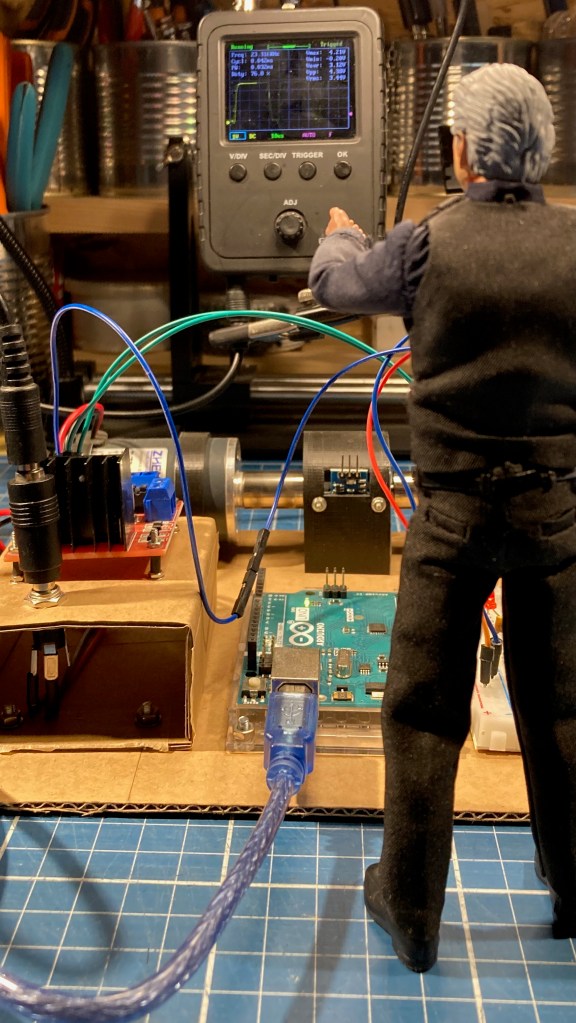
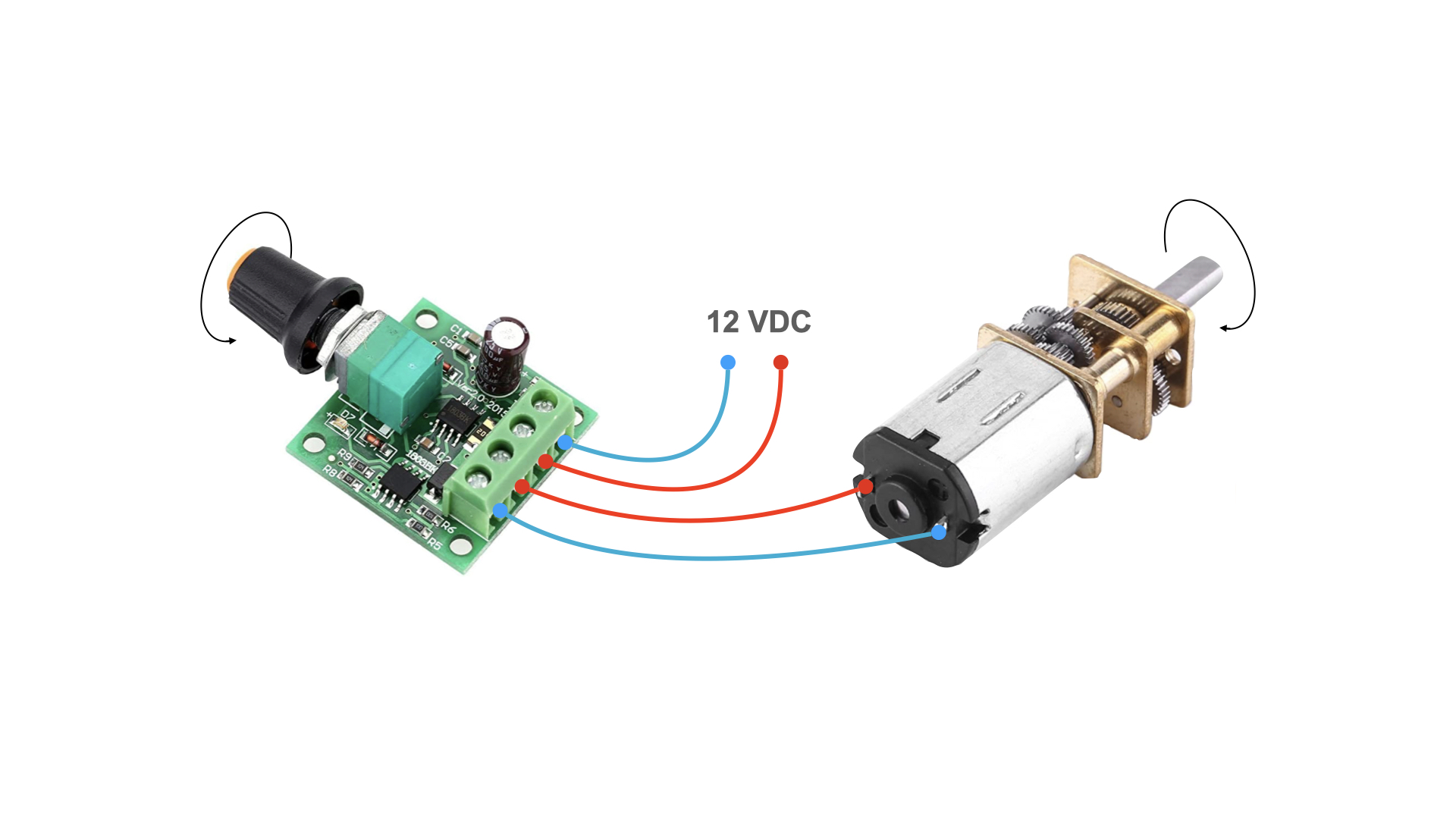
Test de l’électronique de commande du moteur d’entrainement de la plateforme rotative de la Batcave.
Categorie :
Légende :
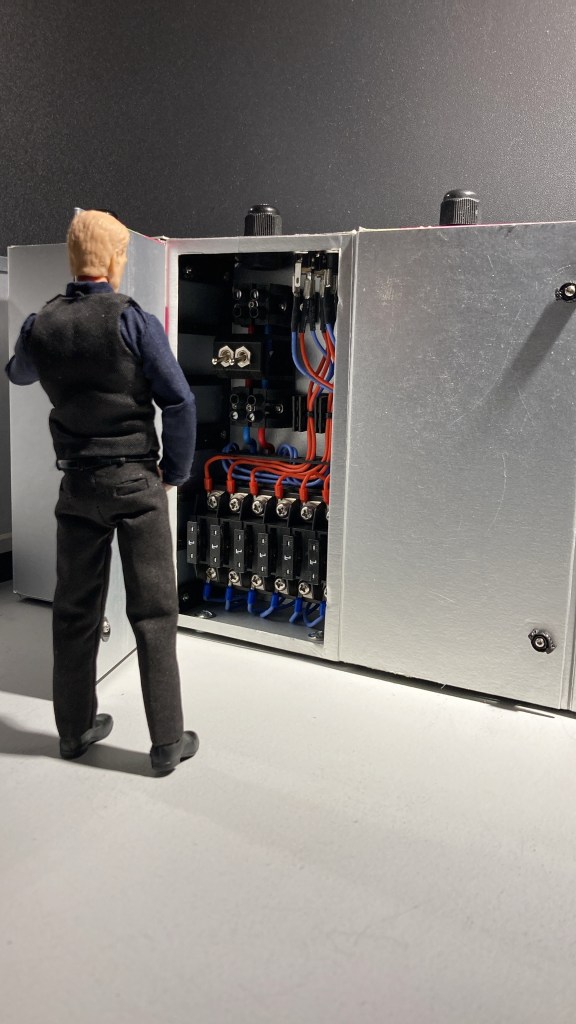
Test de l’électronique de commande du moteur d’entrainement de la plateforme rotative de la Batcave.

Résumé :
Cet article présente la réalisation du prototype du pont roulant bipoutre du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
La réalisation du prototype du pont roulant bipoutre du diorama de la Batcave fait suite à la conception préliminaire de cet équipement.
Voir l’article …

La structure du pont roulant est fabriquée en bois pour des raisons de facilité d’usinage, essentielle lors de cette phase de prototypage, et de maîtrise de l’impact environnementale du projet. Compte tenu des dimensions de certaines pièces constituant cet équipement, il n’était de toute façon pas envisageable de les imprimer avec une imprimante grand public. La perspective d’une fabrication en résine ou par impression professionnelle n’était pas non plus compatible avec le budget prévisionnel du projet.
Les pièces d’assemblage sont imprimées pour des raisons de faisabilité technique et de précision de fabrication. Les principaux sous-ensembles du pont roulant bipoutre sont assemblés par boulonnage (M2).
Les photos utilisées dans cet article ont été prises avant la phase de ponçage et de finition !

Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite fabriquées par le 8FABLAB à Crest dans la Drôme.
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite imprimées par Benoit, membre de la communauté du projet BATLab112.
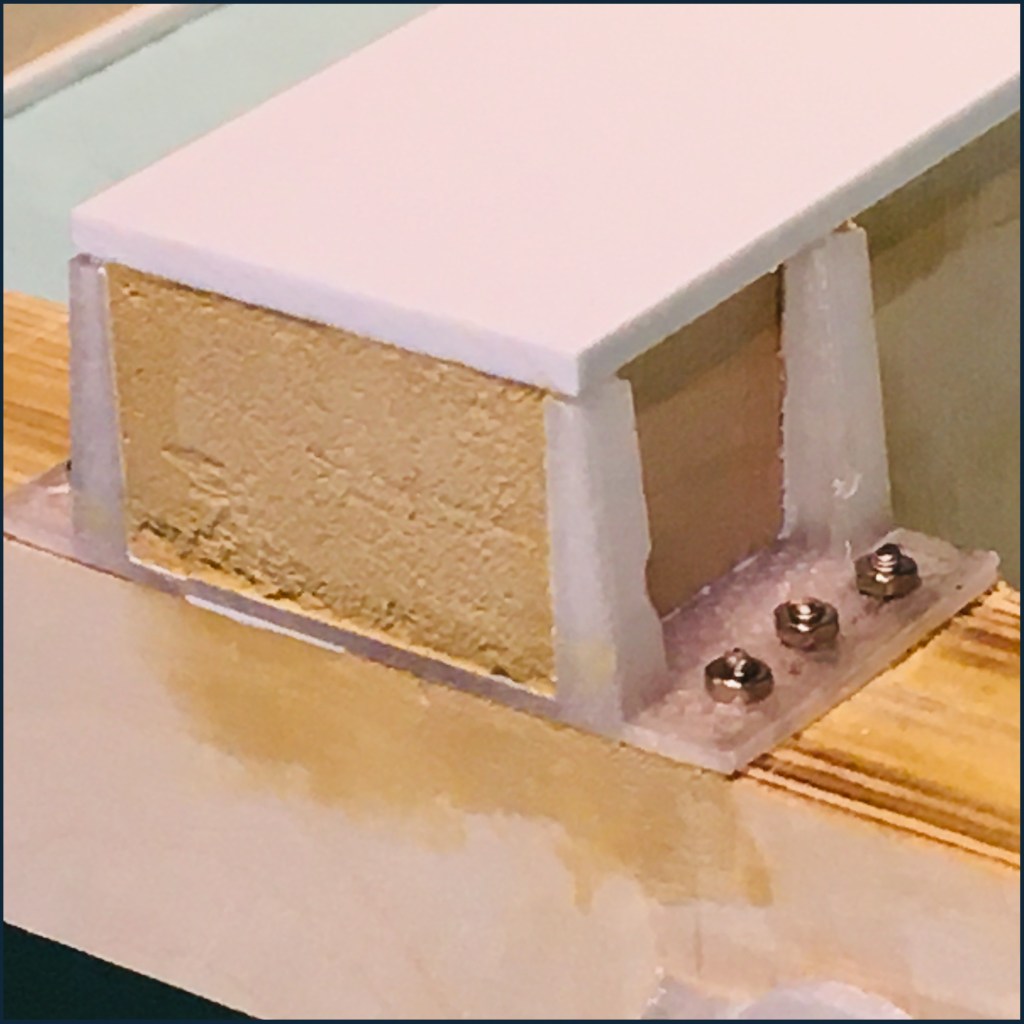
Deux platines d’assemblage sont collées à chaque extrémité des poutres. Ces trois pièces constituent un sous-ensemble. La platine permet le montage et démontage de ce sous-ensemble sur les sommiers du pont roulant par boulonnage.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un montage le plus ajusté possible.
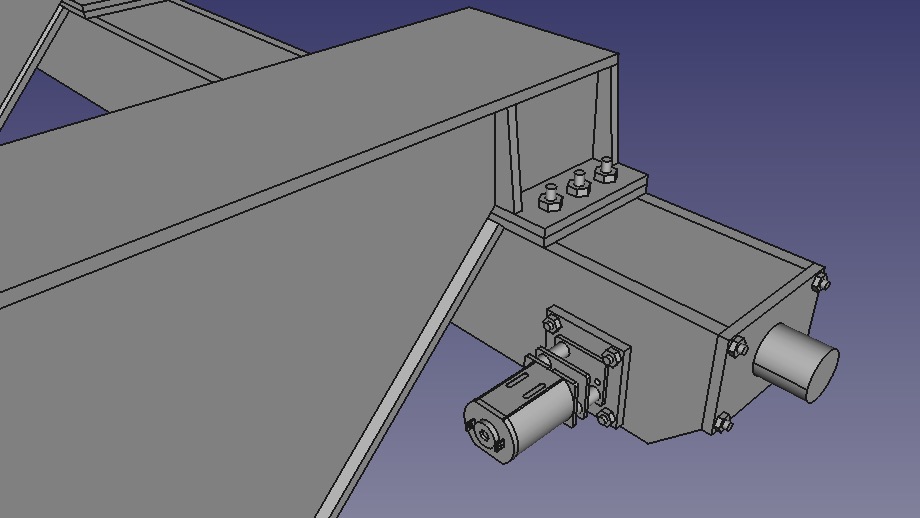
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Sa forme permet de maintenir un micro moteur 6VDC. Un système de fixation supplémentaire reste à l’étude pour le moteur.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un maintien du moteur.

Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Aucune contrainte particulière n’est requise pour la réalisation de cette pièce, destinée à protéger et maintenir en place l’axe de la roue libre.

Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.

Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite aux contraintes d’assemblage rencontrées .

La fabrication des pièces principales en bois est satisfaisante même si leur poids reste important. Les différents éléments constituant les poutres du pont roulant ont été assemblés par collage. L’ensemble est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.

Le point fonctionnel critique sur ce prototype est la liaison pivot des axes de rotation des roues. Il est impératifs que ces liaisons soit la plus fluide possible pour autoriser l’utilisation de micro moteur. Le poids non négligeable de la structure en bois étant déjà un handicap il est impératif de contrôler cette fonction.

L’essieu d’entrainement est réaliser à partir d’un axe en aluminium, des roulements à billes de guidage et une poulie à gorge en V pour la roue. L’essieu de roue libre est réalisé à partir d’un axe et d’une poulie à gorge en V.
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids des deux bras robotiques ainsi que du Trolley sur lequel ils sont fixés. Cependant, les bras robotiques étant en cours de fabrication ce test n’a pu être réalisé.
Toutefois ce test a mis en évidence la trop grande souplesse de la structure supportant les rails de guidage du pont roulant.
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Le couplage de l’axe des roues motrices avec les moteurs est assuré par un assemblage « en force » entre l’axe du moteur et l’axe de la roue.
La prochaine version de cette transmission devra assurer un couplage entre l’axe du moteur et celui de la roue plus durable.
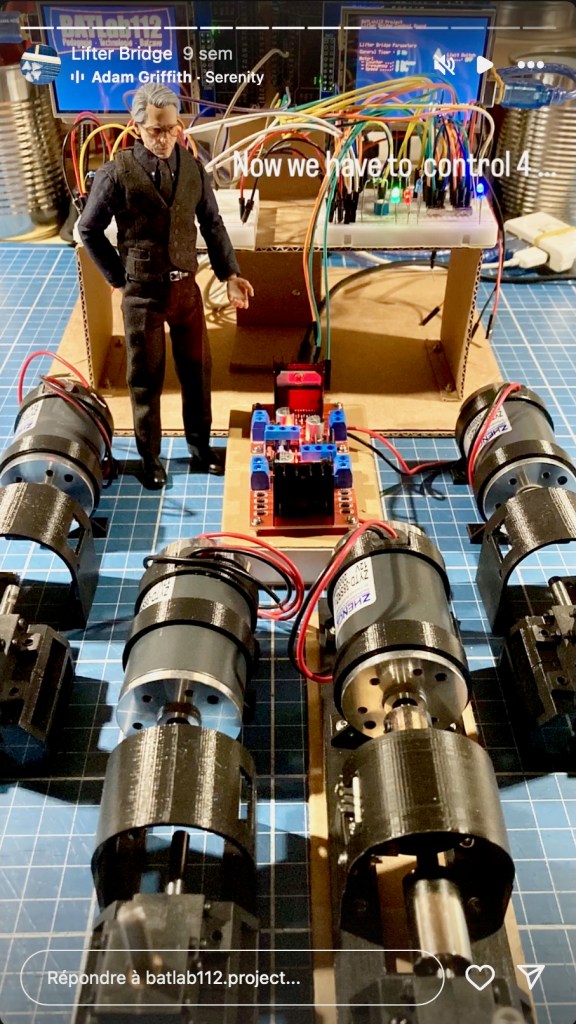
Ce test de motorisation a été réalisé avec deux micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler de manière identiques les tensions d’alimentation des moteurs et ainsi ajuster leurs vitesses de rotation à des valeurs identiques. Le couple de ces moteurs est suffisant pour entrainer l’ensemble ; pont roulant + charge. Le test de motorisation est donc validé.
Même si ces premiers tests ont été réalisés dans des conditions non optimales, ce premier prototype du pont roulant bipoutre équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Il est raisonnable de penser que le fonctionnement de cet équipement sera amélioré sur une structure complète et plus aboutie.
Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.

Le projet BATLab112 prend une nouvelle dimension. Après une longue phase d’étude, depuis la définition des besoins jusqu’à la conception détaillée, il s’agit à présent de concrétiser la réalisation du diorama de la Batcave à l’échelle 1:12.
Lire la suite