Contexte et objectifs de l’utilisation de KiCad
Comme indiqué dans un article précédent, mes premiers travaux de conception électronique ont été réalisés à l’aide de l’éditeur de schémas KiCAD. Dans le cadre pédagogique du projet BATLab112, j’ai constamment veillé à optimiser la qualité et la précision technique de la documentation produite. Au-delà des enjeux strictement liés à l’apprentissage, cette démarche répond également à un objectif opérationnel : assurer une traçabilité rigoureuse de l’avancement de la conception et de la fabrication. Cette exigence s’explique notamment par le rythme parfois irrégulier de l’avancement du projet, fortement conditionné par mes contraintes professionnelles. En effet, le projet BATLab112 est financé sur fonds propres et développé sur mon temps libre. Cette discontinuité dans la planification du travail génère donc des pertes d’efficacité et un risque accru d’erreurs lors de la reprise des activités après de longues périodes d’interruption. C’est précisément ce constat qui m’a conduit à explorer plus en profondeur les fonctionnalités des logiciels utilisés, tels que FreeCAD ou KiCAD, afin de documenter aussi précisément que possible la progression des différentes tâches.
Le présent article s’inscrit dans un contexte particulier. D’une part, l’avancement du pont élévateur à l’échelle 1/12 du diorama, l’équipement industriel le plus complexe du dispositif, a été ralenti à la suite de la réalisation d’une maquette de validation. Les essais menés sur cette maquette ont mis en évidence plusieurs insuffisances dans la conception des schémas électroniques destinés au pilotage du système. D’autre part, cette nécessité de réviser la conception s’est trouvée aggravée par la mise à jour du logiciel vers la version 9.0.7, laquelle a entraîné des comportements inattendus lors de l’ouverture de fichiers créés avec une version antérieure, en particulier ceux reposant sur l’usage de feuilles hiérarchiques.
Face à ces difficultés, il m’a paru indispensable de réexaminer l’usage de cette fonctionnalité afin de renforcer la robustesse de mes futurs fichiers de conception électronique, tout en améliorant la qualité des schémas de commande du pont élévateur.
Principe des feuilles hiérarchiques dans KiCad
Structuration modulaire des schémas électroniques
Dans le logiciel de conception électronique KiCad, la fonctionnalité des feuilles hiérarchiques occupe une place centrale dans la structuration et la gestion de schémas complexes. Elle permet d’organiser un projet en sous-ensembles cohérents, facilitant ainsi la lisibilité, la modularité et la réutilisation des blocs fonctionnels au sein d’un même design ou dans plusieurs projets successifs.
Sur le plan conceptuel, une feuille hiérarchique constitue une représentation encapsulée d’une partie du schéma global. Elle joue un rôle comparable à celui d’un module ou d’une fonction dans un langage de programmation : en isolant une fonction électronique spécifique — telle qu’une alimentation, une interface de commande ou un circuit de régulation — elle permet de clarifier les responsabilités de chaque sous-bloc tout en réduisant la charge cognitive nécessaire à la compréhension du système complet. Cette approche hiérarchique s’avère particulièrement pertinente pour les projets comportant de multiples interactions entre sous-systèmes, où un schéma linéaire et monolithique entraînerait inévitablement une perte de lisibilité.
Création et intégration des feuilles hiérarchiques
Sur le plan opérationnel, KiCad offre deux mécanismes complémentaires au sein de cette fonctionnalité :
- La création de feuilles hiérarchiques, qui génère un fichier de schéma distinct et permet de circonscrire un sous-circuit dans un espace dédié.
- L’utilisation de symboles hiérarchiques, qui assurent l’intégration de ces sous-schémas au sein du schéma principal, tout en définissant clairement les connexions électriques via des ports d’entrée et de sortie.
Avantages pour la maintenance et la réutilisation des designs
L’un des avantages majeurs de cette approche réside dans la possibilité de réutiliser des blocs fonctionnels sans les reconstruire entièrement. Les concepteurs peuvent ainsi constituer une bibliothèque interne de sous-circuits robustes et validés, contribuant à une standardisation progressive de leurs méthodes de conception. De plus, en cas de modifications, les feuilles hiérarchiques permettent une mise à jour localisée du design, limitant les erreurs potentielles et garantissant une meilleure cohérence globale du projet.
Enfin, la structuration hiérarchique favorise la collaboration au sein d’équipes de conception. Chaque membre peut se voir confier un sous-système particulier, dont le développement est rendu indépendant des autres parties du schéma. Cette division du travail, rendue explicite par la hiérarchie des feuilles, contribue à une gestion plus efficace des tâches ainsi qu’à une documentation technique plus rigoureuse.
Application au pont élévateur du projet BATLab112
Principe de fonctionnement du pont élévateur
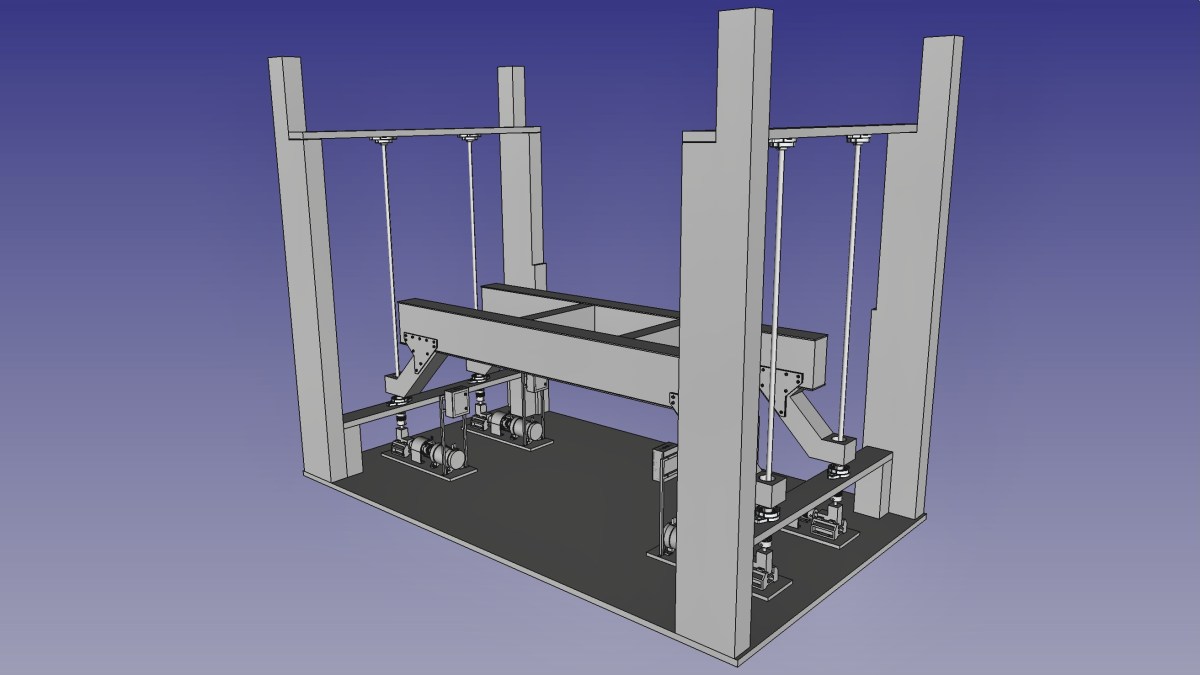
Le pont élévateur intégré au diorama du projet BATLab112 a pour fonction d’assurer le déplacement vertical de la Batmobile entre les deux niveaux de l’atelier robotisé. Son principe de fonctionnement s’inspire directement des ponts élévateurs électriques à quatre colonnes utilisés dans l’industrie automobile pour le levage de véhicules lourds à des fins de maintenance. Chaque colonne de ce type de dispositif est équipée d’une vis sans fin entraînée par un moteur électrique. La synchronisation des quatre moteurs permet de contrôler de manière coordonnée la montée ou la descente de la plateforme supportée par l’ensemble des colonnes, en fonction du sens de rotation imposé à ces derniers.
Intégration dans l’atelier robotisé du diorama
Cet équipement s’insère dans un ensemble plus large d’installations composant le diorama du projet BATLab112, lequel comprend notamment :
- Une plateforme rotative soutenue par les colonnes du pont élévateur
- Un pont roulant bipoutre équipé de deux bras robotiques destinés à la manipulation de charges importantes
- Un poste électrique assurant la distribution de l’énergie nécessaire au fonctionnement des différents équipements
- Quatre consoles de commande dédiées au pilotage individuel de chacun de ces sous-systèmes.
L’ensemble de ces dispositifs vise à atteindre un niveau élevé de réalisme tant fonctionnel qu’esthétique.
Architecture hiérarchique du schéma électrique
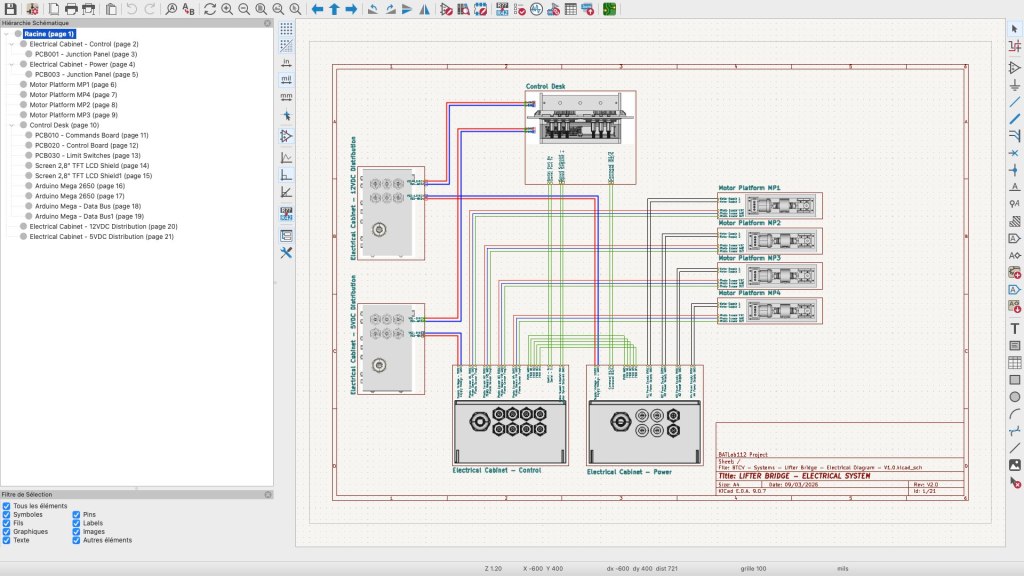
Niveau 1 : Architecture générale du système
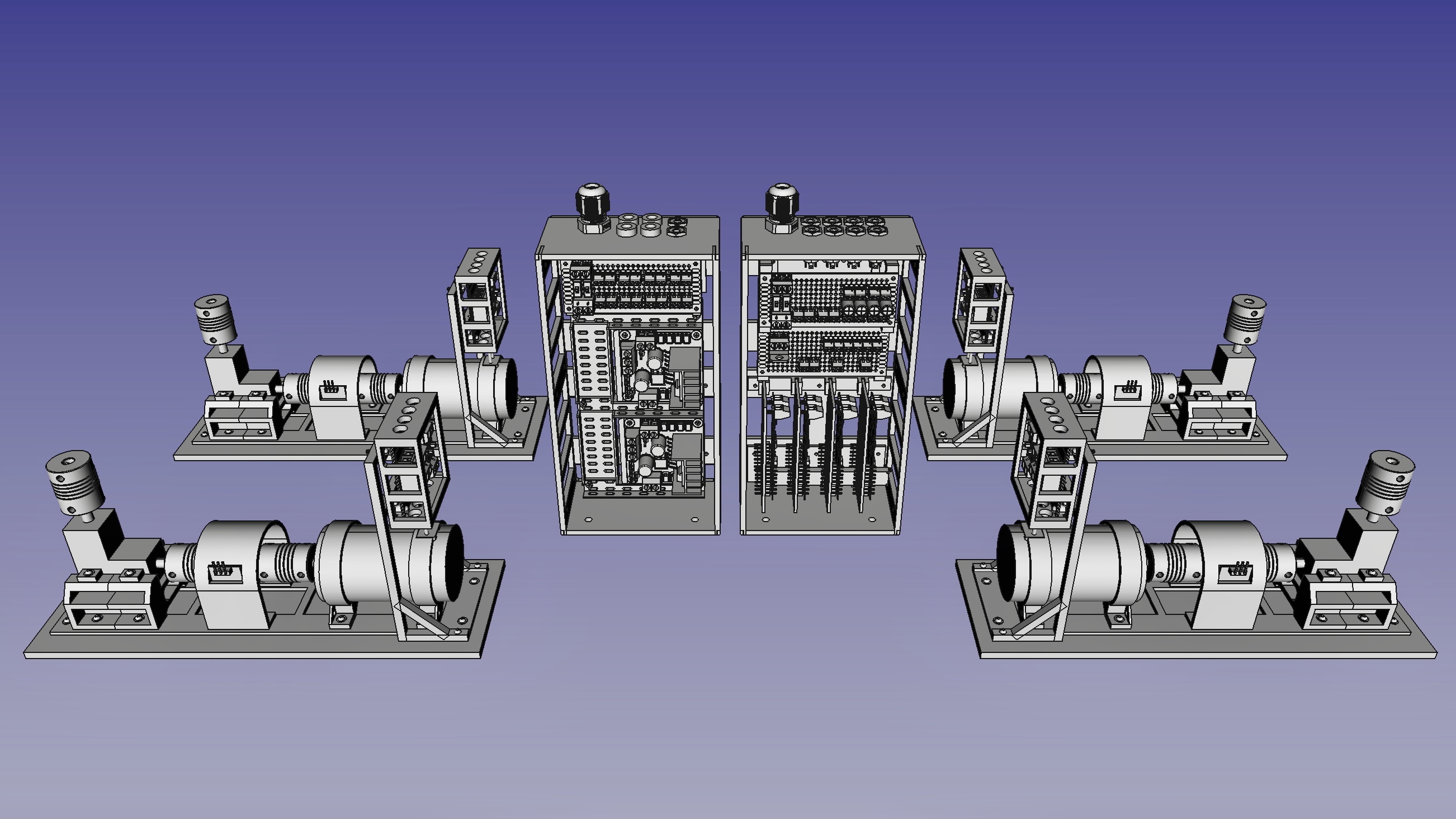
Le premier niveau hiérarchique du schéma électrique du pont élévateur correspond à la structure générale de son architecture de commande et d’alimentation. Il comprend :
- Une console de commande
- Deux armoires électriques destinées respectivement à l’asservissement des moteurs (régulation, contrôle du sens de rotation, ajustement de la vitesse)
- Quatre plateformes moteurs assurant l’entraînement mécanique des quatre colonnes
- Deux armoires issues du poste électrique, garantissant une distribution de l’énergie électrique
Niveau 2 : Organisation interne des équipements
Le second niveau hiérarchique décrit l’organisation interne des modules constituant chacun des équipements précédemment mentionnés.
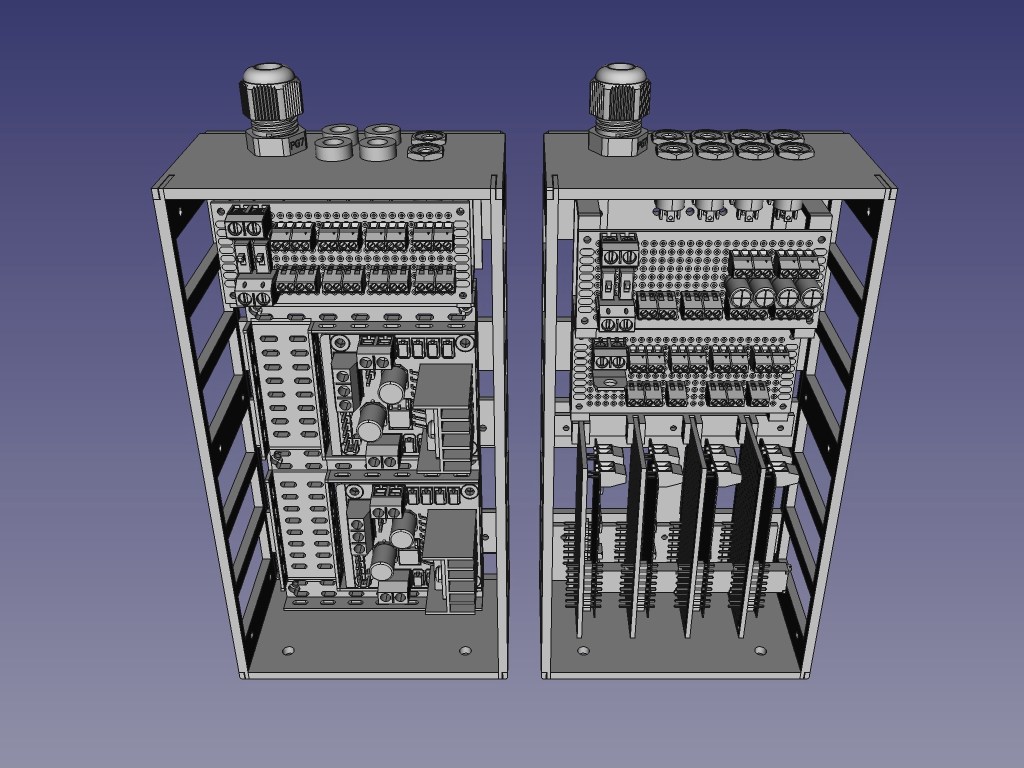
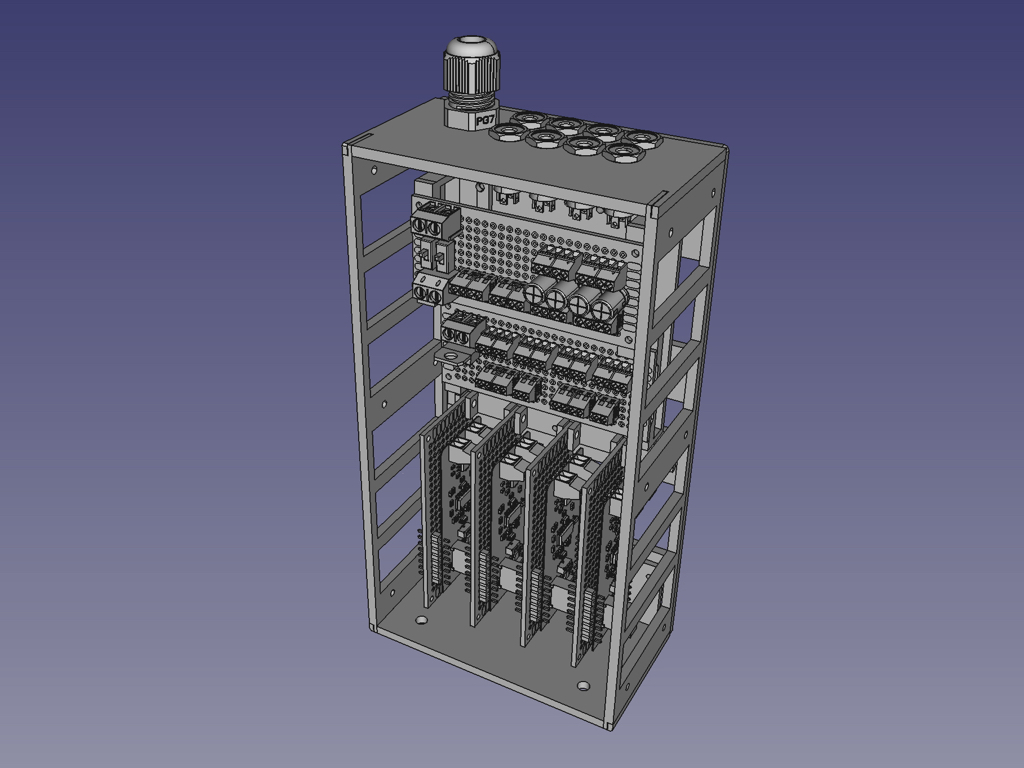
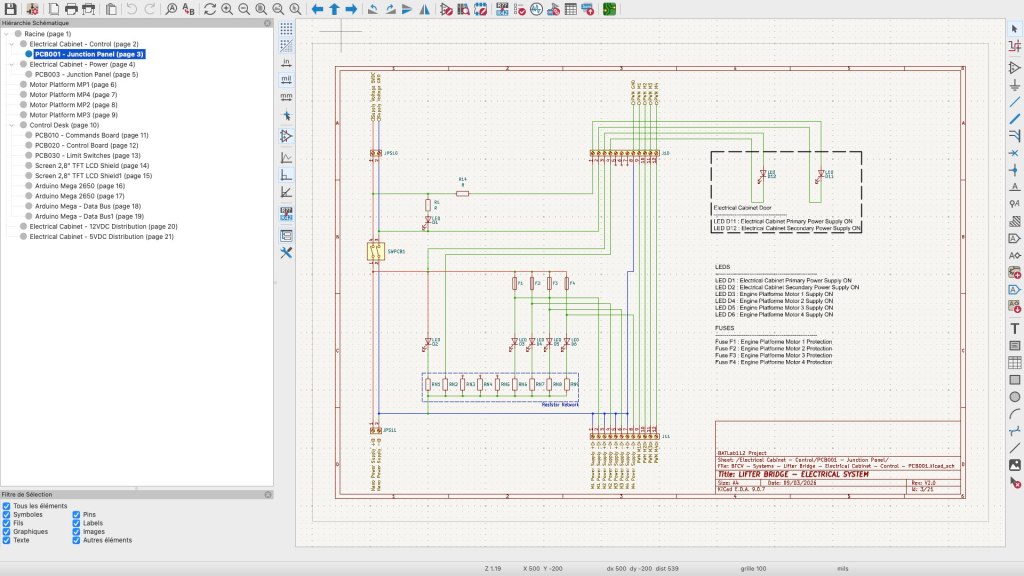
Armoire électrique 1 : Régulation de la vitesse de rotation des moteurs
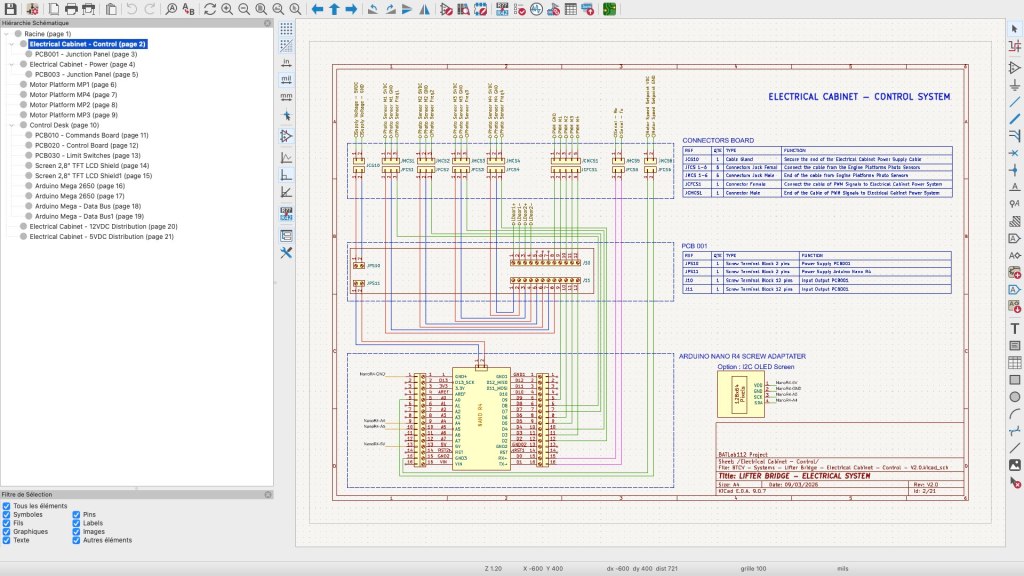
L’armoire électrique qui regroupe les équipements électroniques de régulation de la vitesse de rotation des moteurs contient :
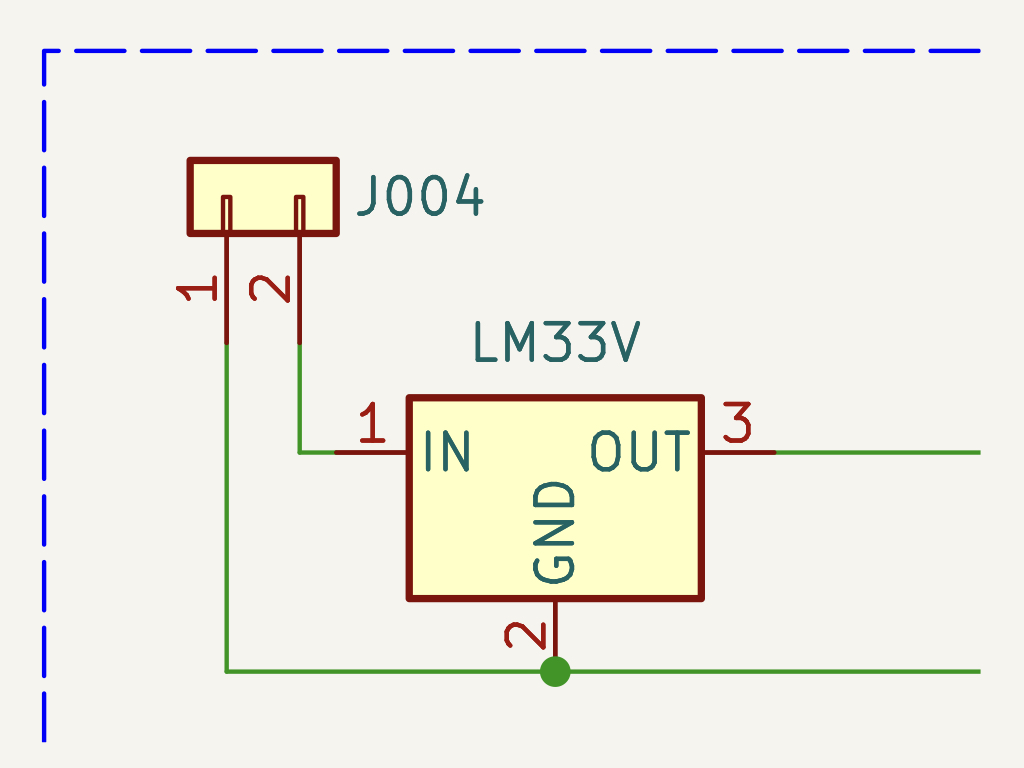
- Un module adaptateur accueillant un microcontrôleur de type Arduino R4
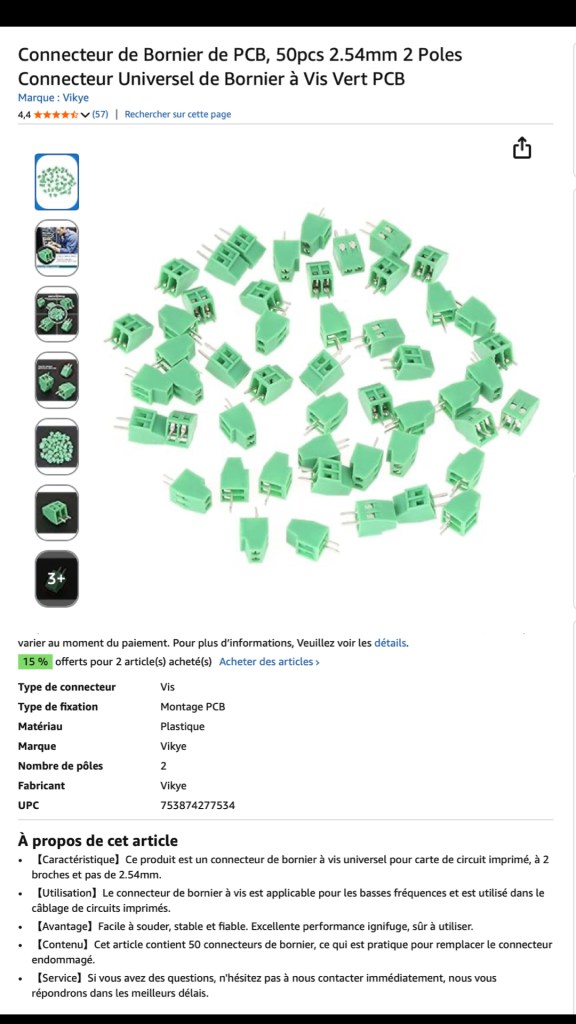
- Un circuit imprimé (PCB) regroupant les fonctions de sectionneur principal, porte-fusible et bornier.
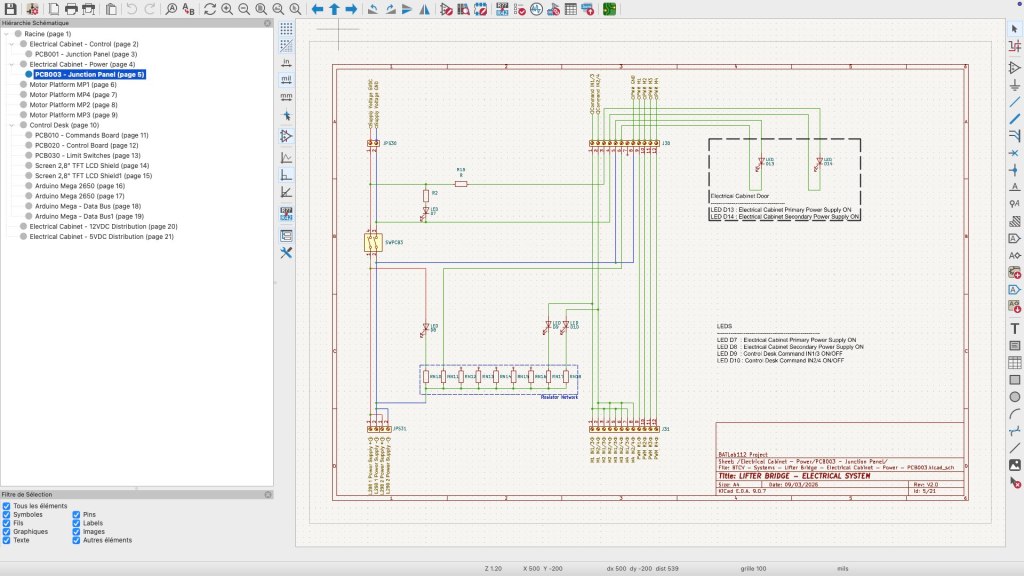
Armoire électrique 2 : Interface de puissance électrique et de contrôle du sens de rotation des moteurs
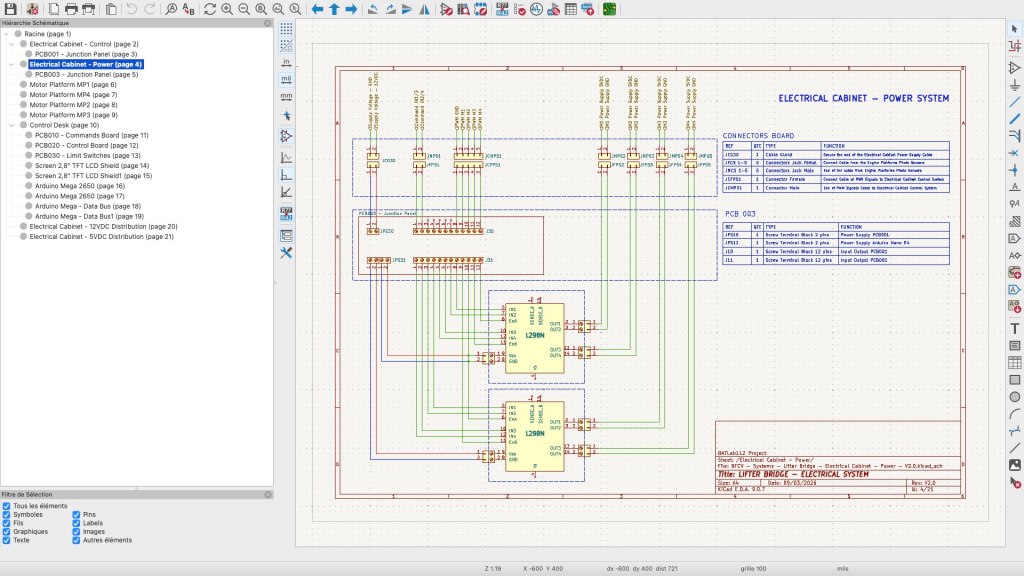
L’armoire électrique qui regroupe les équipements électroniques de contrôle du sens de rotation des moteurs contient :
- Deux modules constitués de doubles ponts en H
- Un circuit imprimé (PCB) regroupant les fonctions de sectionneur principal et bornier.
Console de commande
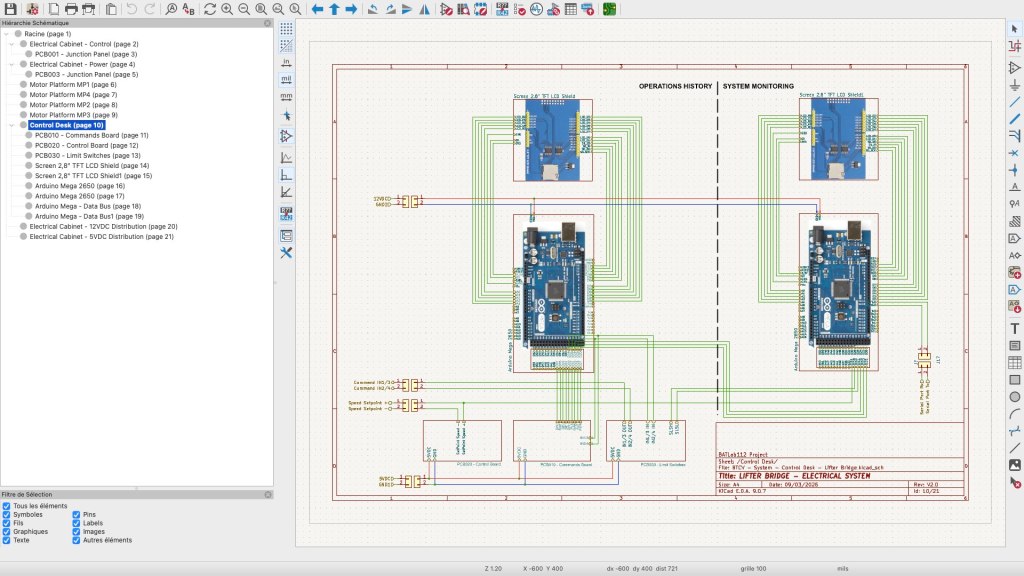
La console de commande contient :
- Deux cartes Arduino Mega 2560, associées à deux écrans LCD TFT de 2,8 pouces
- Trois circuits imprimés (PCB) dédiés aux fonctions de commande électronique.
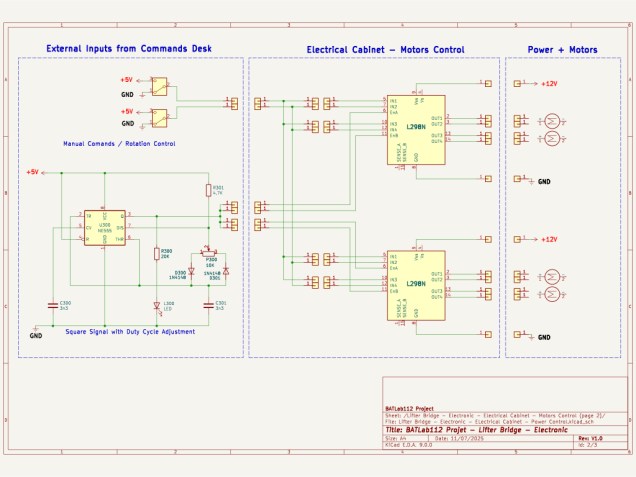
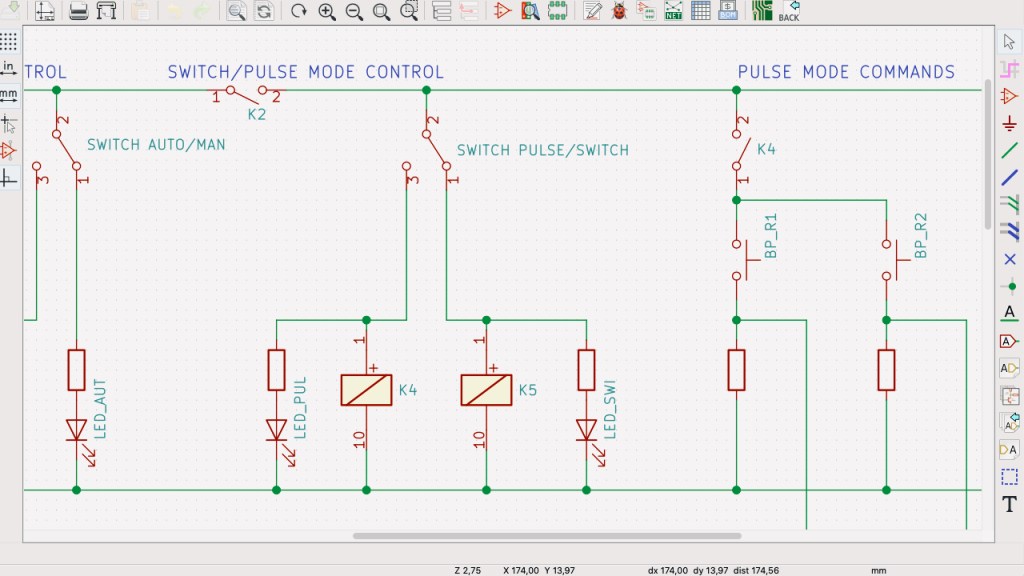
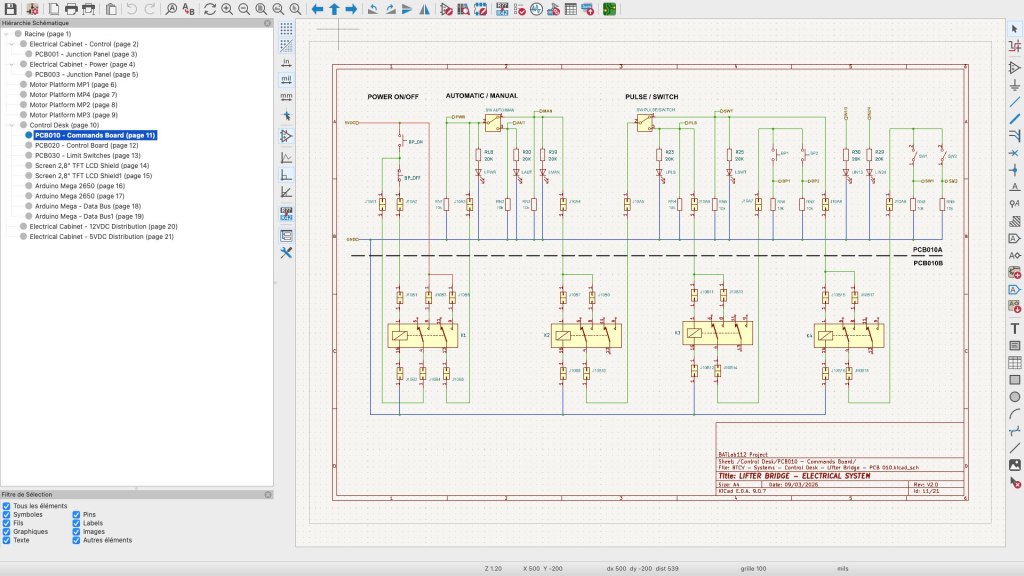
Niveau 3 : Conception détaillée des circuits électroniques
Enfin, le troisième niveau hiérarchique permet de détailler le schéma électronique propre à chacun des PCB identifiés au niveau supérieur. Ce niveau constitue l’unité de description la plus fine, garantissant une documentation précise et exploitable pour la conception, la vérification et la maintenance des différents modules électroniques du pont élévateur.
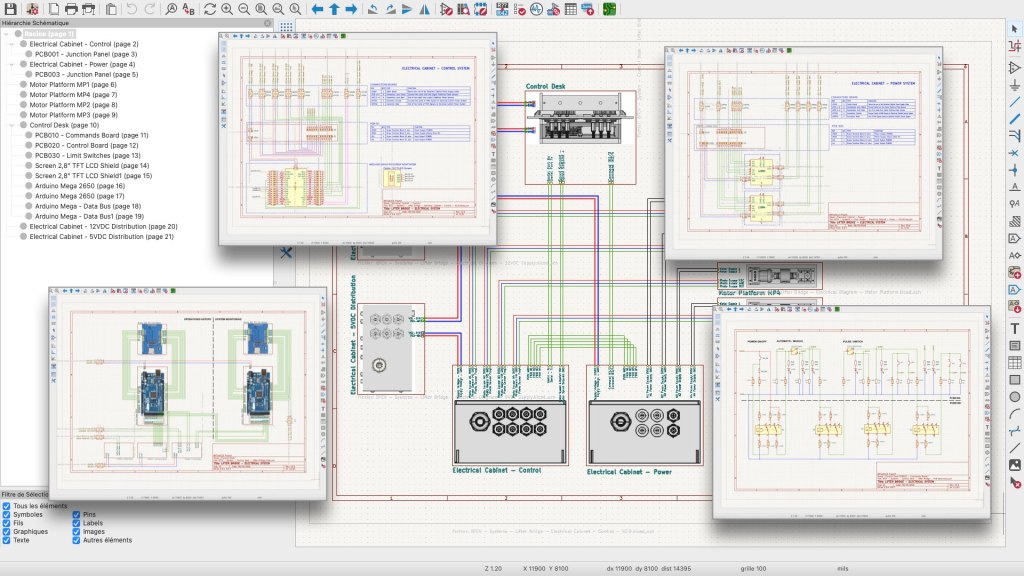
Conclusion
Le fichier final de conception réalisé sous KiCad regroupe l’ensemble des feuilles schématiques correspondant à tous les modules de chacun des niveaux hiérarchiques. Cette organisation centralisée offre une navigation efficace au sein du projet : elle permet de sélectionner rapidement le degré de détail souhaité lors de la consultation des schémas, tout en conservant une vision d’ensemble du fonctionnement global du système. Une telle visibilité est particulièrement utile pour appréhender la structure et la cohérence des liaisons établies entre les différents équipements définis au premier niveau hiérarchique.
Pour plus d’infos
Pour en apprendre plus sur le contenu et le fonctionnement de ces schémas
Pour découvrir le diorama à l’échelle 1/12 du projet BATLab112