Gamification involves incorporating elements of online games, such as points, leaderboards, and badges into non-game contexts, in order to improve engagement with both employees and consumers. The main point of this paper is, to sum up, what previous authors investigated in the field of Gamification. An analysis of the literature covering 50 papers from 2011 to 2016 was conducted, using Leximancer software, to determine and shape the main themes and concepts proposed in gamification papers. Answering our research question, “What guidelines may provide to future research, the key themes and concepts found in published scientific papers on gamification?”, we conclude that the researchers identified eight themes (gamification; game; use; users; business; points; engagement; learning) and twenty-eight related concepts. The present systematic review contributes to establishing possible guidelines for prospective studies, based on the analyzed papers, considering particularly their ‘Conclusions’ and on the ‘Future research’ sections, integrating game design contents in business, learning and education. Further, highlights the usefulness of Leximancer for qualitative content analysis, in this field of research.
La ludification ou gamification propose de s’inspirer des éléments du jeu vidéo pour concevoir des produits et services professionnels, avec l’objectif que l’usage de ces derniers soit plus agréable, hédonique, engageant et motivant. La ludification devrait donc conduire à des changements productifs dans les pratiques de travail. En appliquant des éléments ludiques à des systèmes non ludiques, la ludification vise à générer motivation et engagement au travail, en mettant l’accent sur les expériences agréables, voire amusantes. Ainsi, elle cherche à amener les opérateurs à réaliser une tâche qu’ils n’auraient pas ou peu réalisée spontanément avec la même efficacité en utilisant des formes d’interactions humain-machine qui renvoient à l’univers esthétique et interactif du jeu (Marache-Francisco et Brangier, 2015).
L’atelier PartDesign de FreeCAD propose depuis la version 0.17 les 3 outils : Conteneur, Corps et Groupe, qui d’après la documentation officielle de FreeCad en ligne sont « utiles pour organiser un modèle et créer des assemblages ».
Après déjà quelques années d’utilisation de FreeCAD, j’avoue ne pas avoir tout de suite compris le réel intérêt de ces outils. Je passe rapidement sur l’outil Corps, passage obligé pour créer une pièce. J’ai commencé à utiliser l’outil conteneur lorsque je souhaitais créer des assemblages statiques. Grâce à cet outil, et celui de l’atelier Part Créer une copie simple, je peux transformer un assemblage composé de plusieurs corps en une seule pièce. Pour autant, je n’avais pas encore perçu tout l’intérêt de l’outil Groupe.
J’ai réellement utilisé tout le potentiel de ces 3 outils simultanément lors de la définition d’un élément de la structure Cantilever du local électrique.
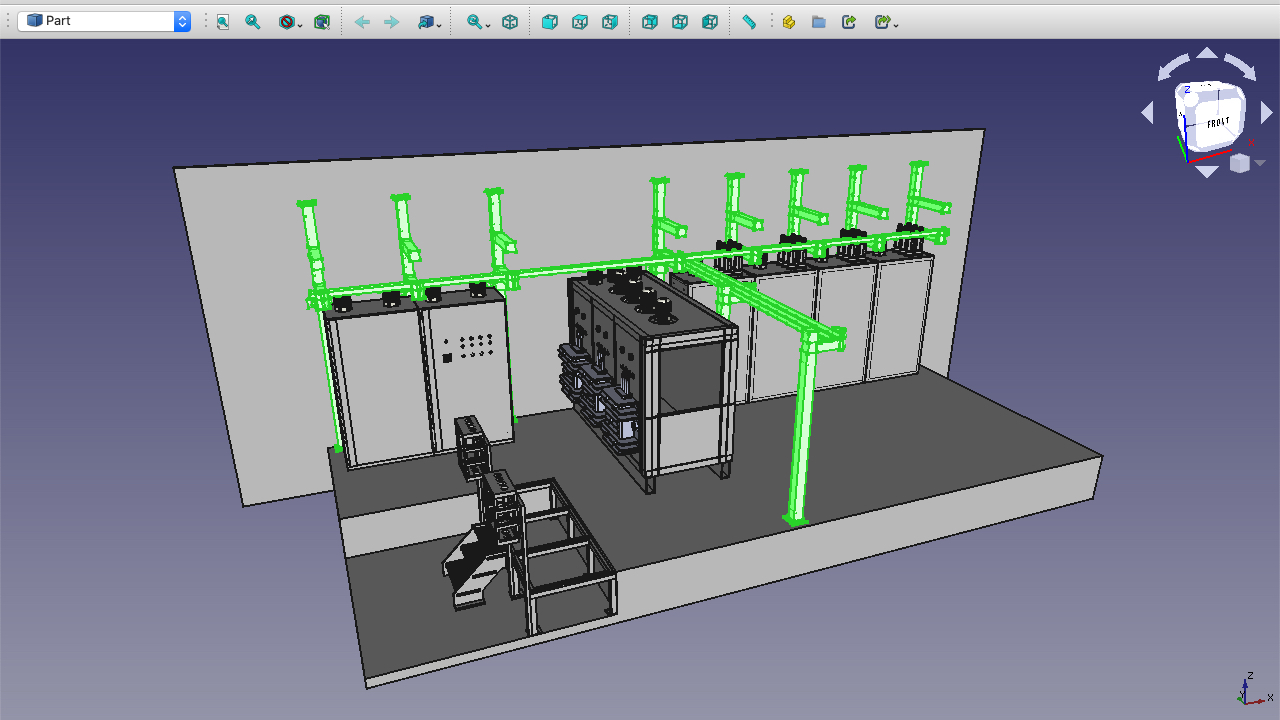
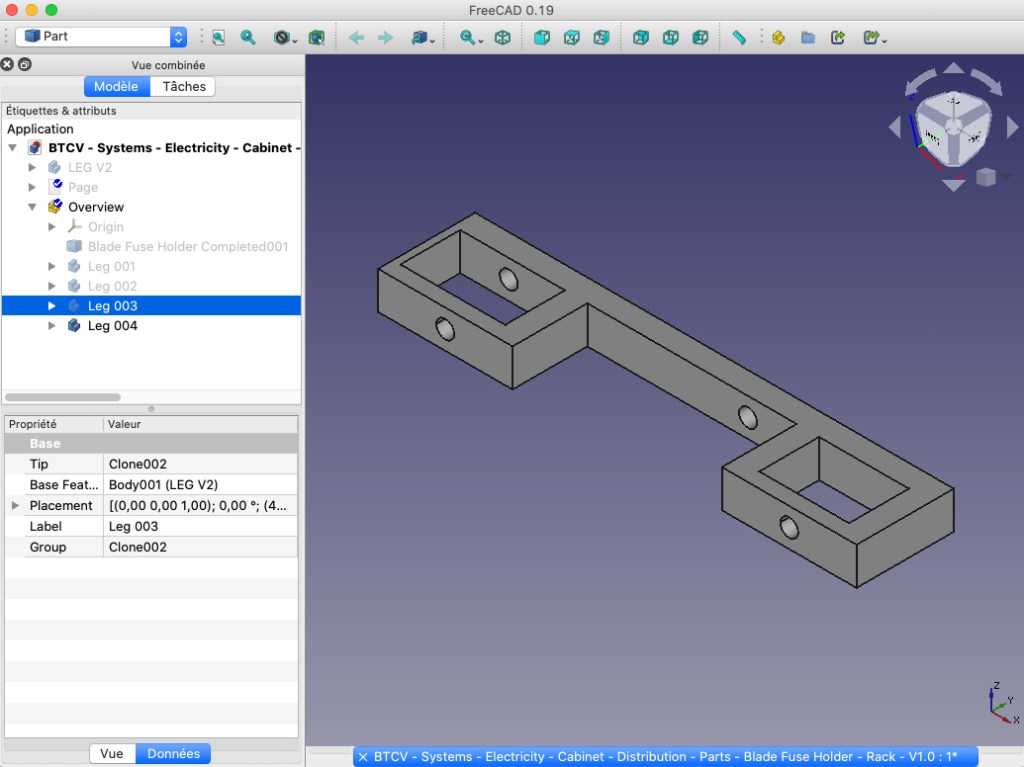
La structure Cantilever se compose de montants de deux types : des montants de grandes hauteurs et des montants de hauteurs plus réduites. De plus, en fonction de leur position au sein de la structure, ces montants sont équipés d’appliques lumineuses ou de capuchons de protection. Pour éviter de créer autant de modèles de montants que de configuration possibles, j’ai opté pour la méthode illustrée par la capture d’écran.
Un groupe a été créé pour chaque corps pouvant intervenir dans la composition d’un montant. Au sein de ces groupes plusieurs versions de ces corps ont été développées tout au long du processus de conception des montants. J’ai ensuite utilisé l’outil Clone de l’atelier PartDesign pour cloner un corps présent dans un groupe et l’utiliser dans un assemblage au sein d’un conteneur.
Grace à cette méthode je dispose seulement de 2 conteneurs correspondants au 2 type de montants, dans lesquels j’active et désactive les clones des corps en fonctions des options du montant en cours de définition.
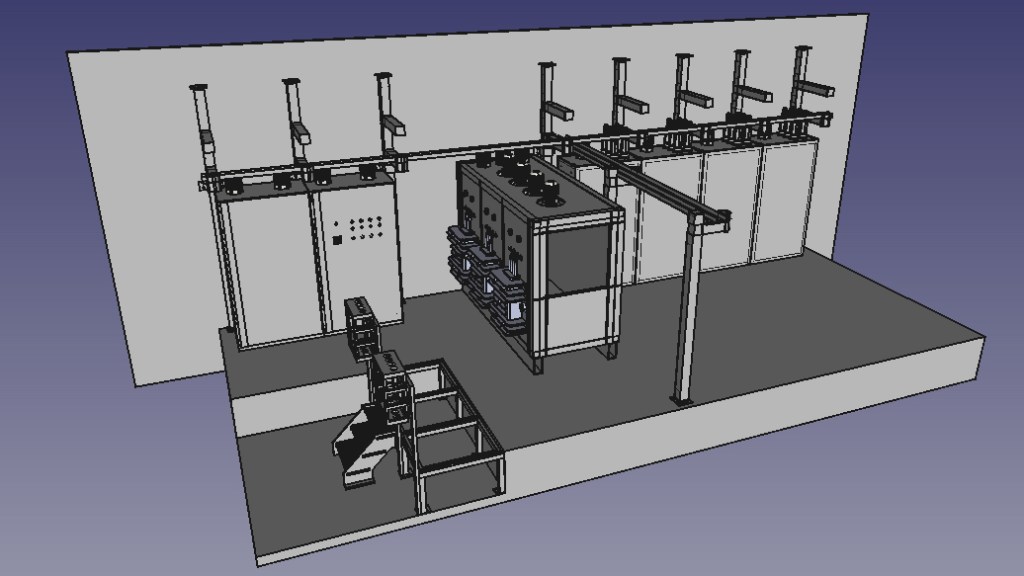
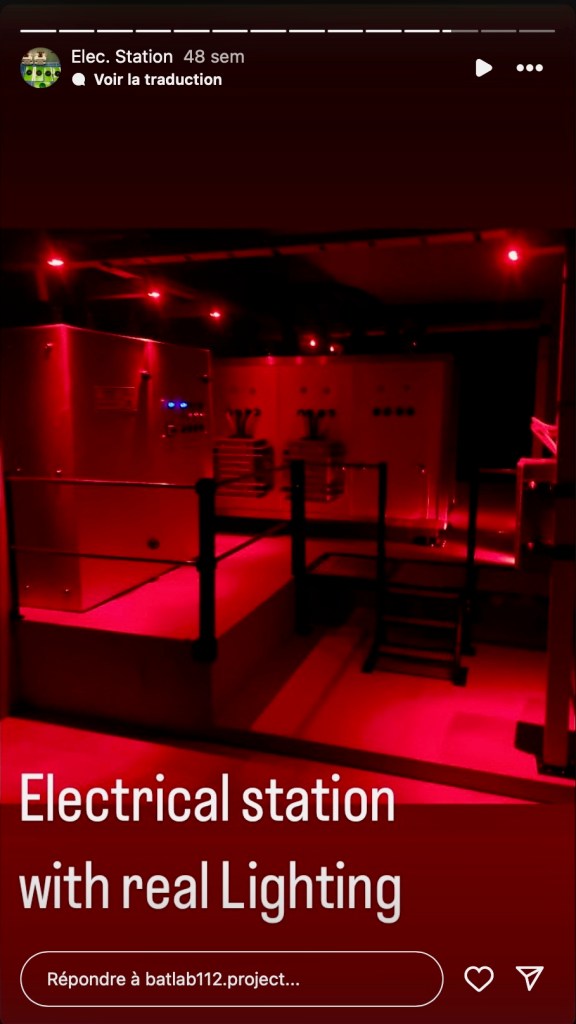
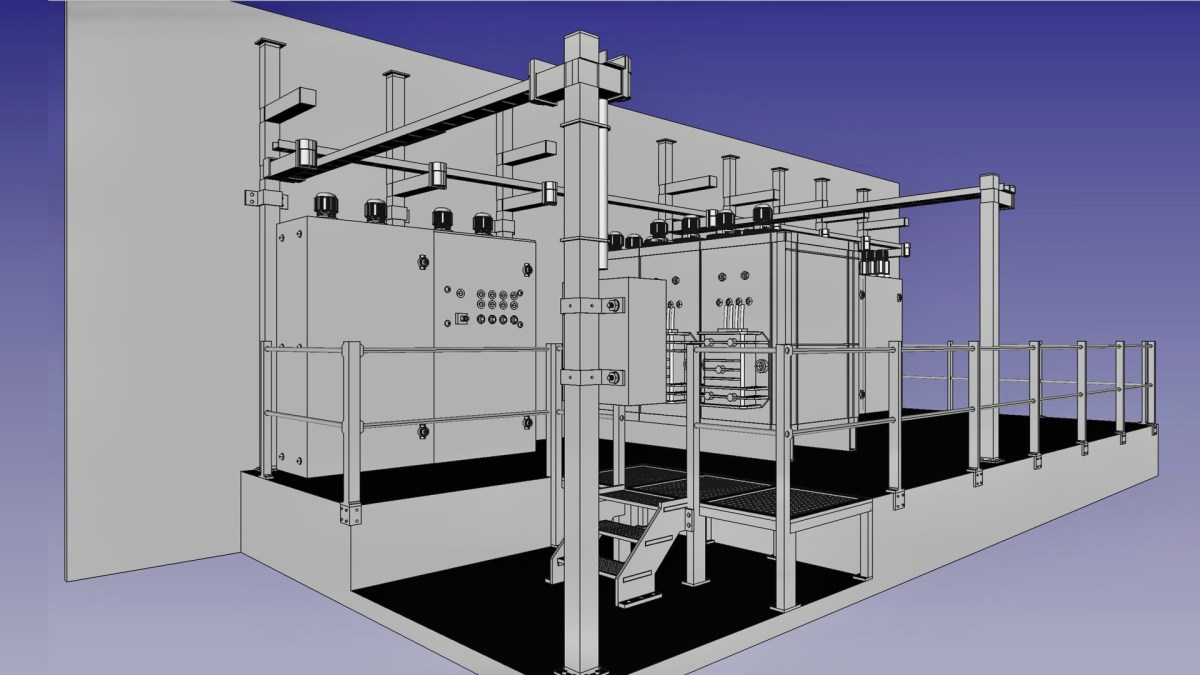
Cet article présente la deuxième version de la conception détaillée, du local électrique à l’échelle 1/12, du diorama de la Batcave du projet BATLab112. Cette mise à jour de cette conception est en lien avec la réalisation du premier modèle opérationnel du local technique.
Cet article fait suite à l’article précédent sur la conception détaillée du local technique et ceux de la fabrication des différents éléments du modèle opérationnel.
Structure Cantilever de support des chemin de câble
Passerrelle d’accès au local électrique
Les modifications par rapport à la précédente version de la conception détaillée :
Une quatrième armoire de distribution
La structure Cantilever de support des chemin de câbles
Un premier design de la passerelle d’accès au local électrique
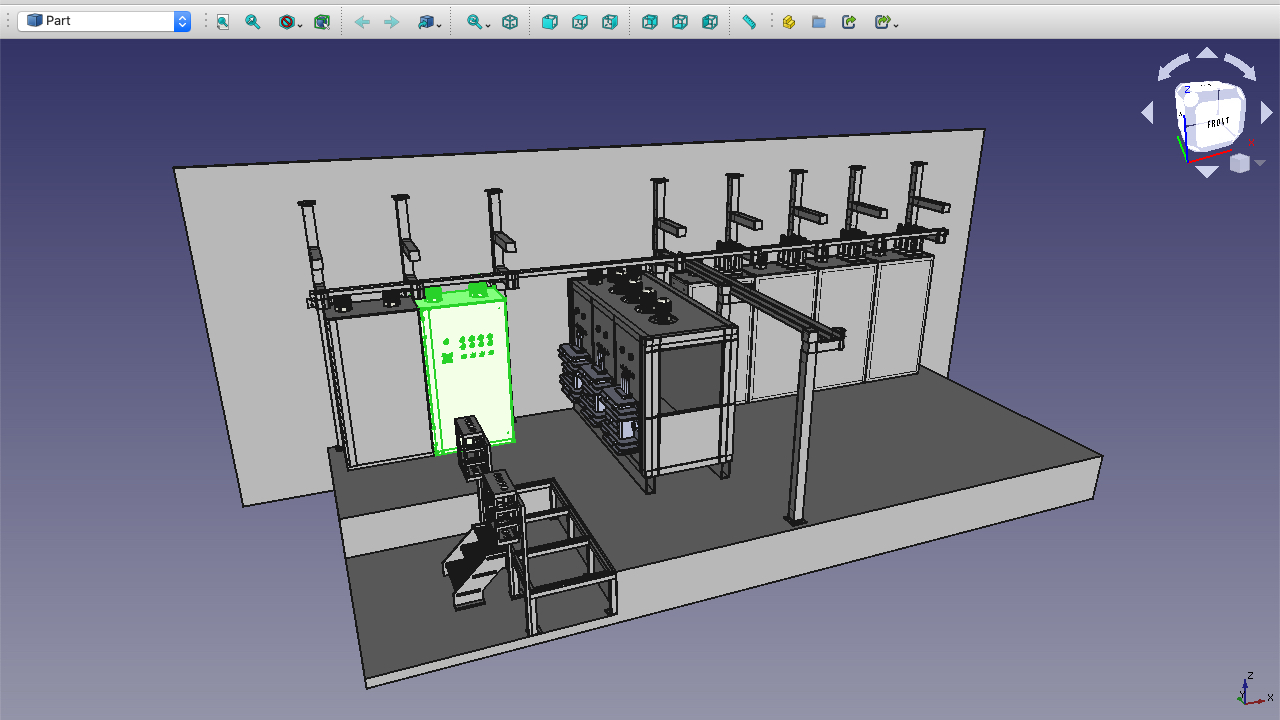
Une quatrième armoire de distribution
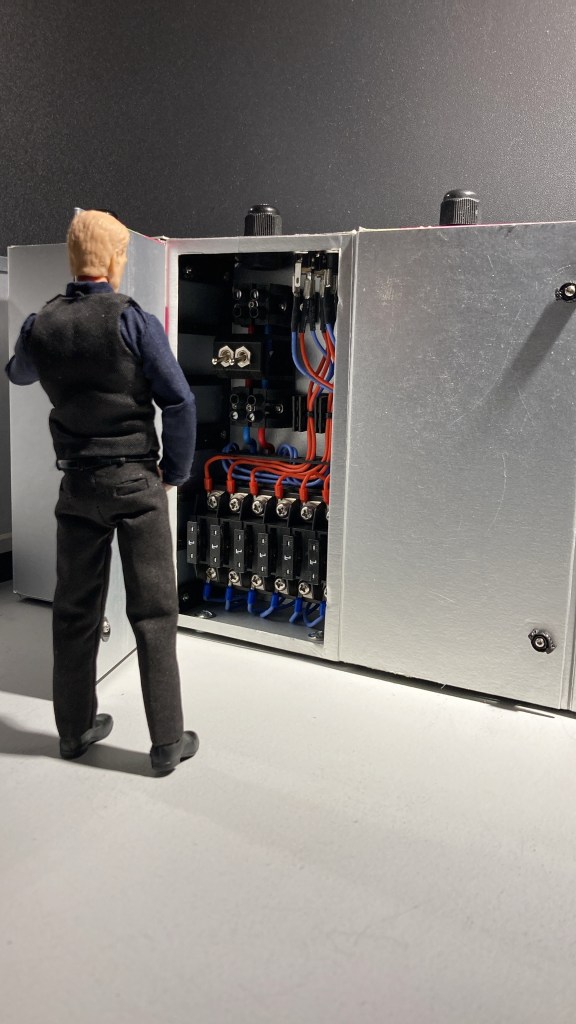
Cette quatrième armoire de distribution, identique dans sa conception au 3 premières est une armoire supplémentaire pour assurer la distribution des tensions 12VDC.
Armoires de distribution
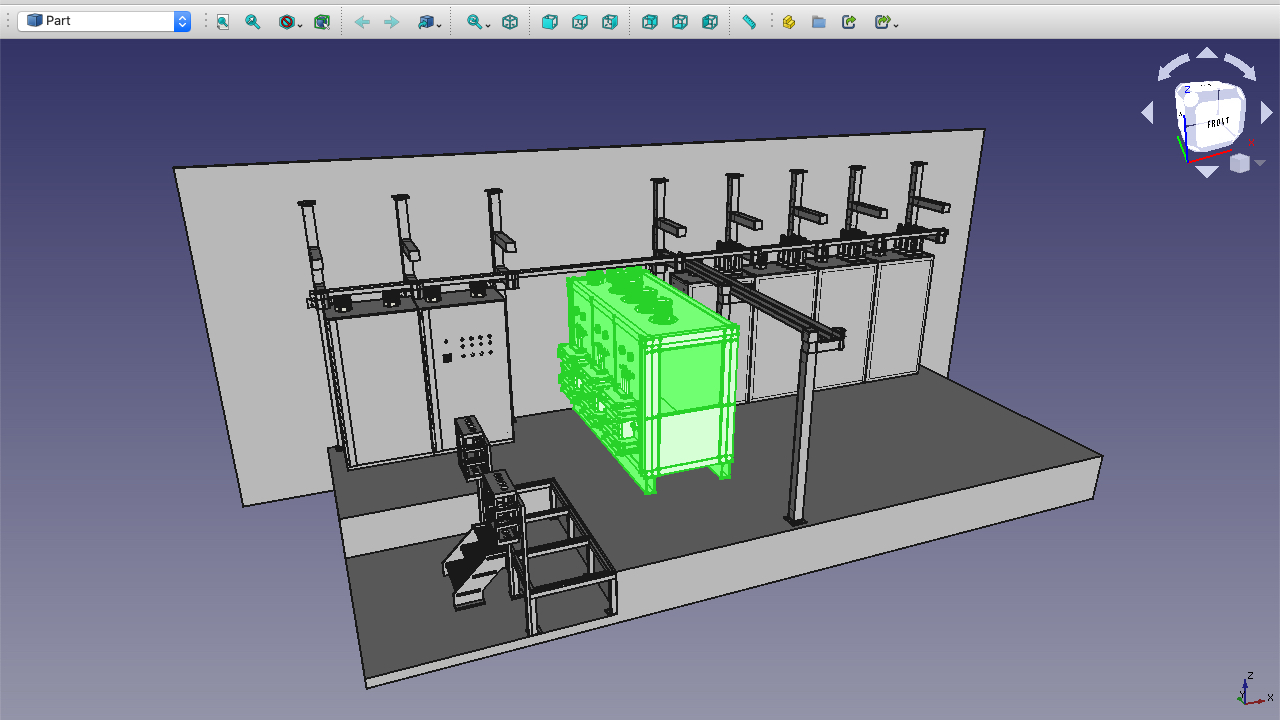
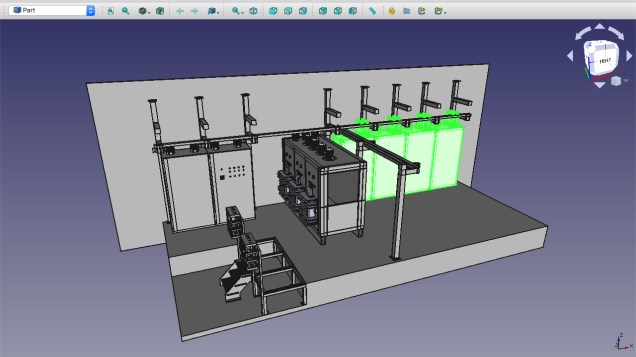
La structure cantilever
Cette structure est conçue comme support au chemin de câble. Le détail de sa conception fera l’objet d’un prochain article en cours de rédaction.
Structure Cantilever de support des chemin de câble
La passerelle d’accès
La conception de cette passerelle n’est pas encore totalement aboutie lorsque cet article sera mis en ligne. Un article dédié est en cours de rédaction.
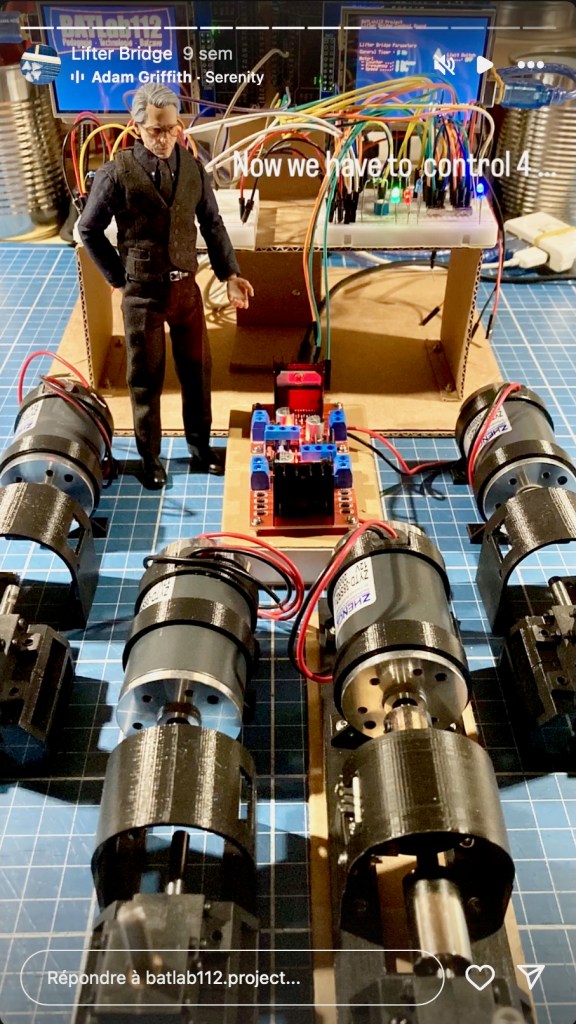
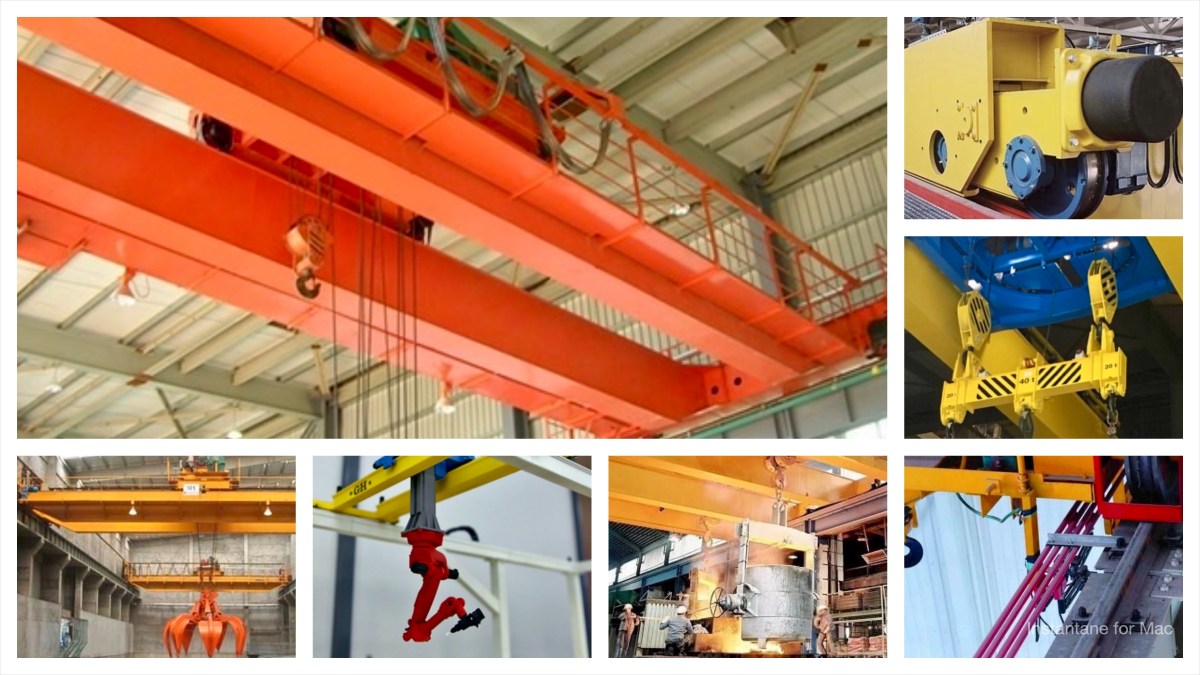
Cet article de présentation de la structure mécanique du pont roulant bipoutre fait suite à un article de présentation de la conception préliminaire de cet équipement.
Si ce prototype permet de valider le design de la structure du quadrilatère du pont roulant, il reste à présent à définir plus précisément le design des rails de roulement du pont ainsi que le système de festons de câbles électriques.
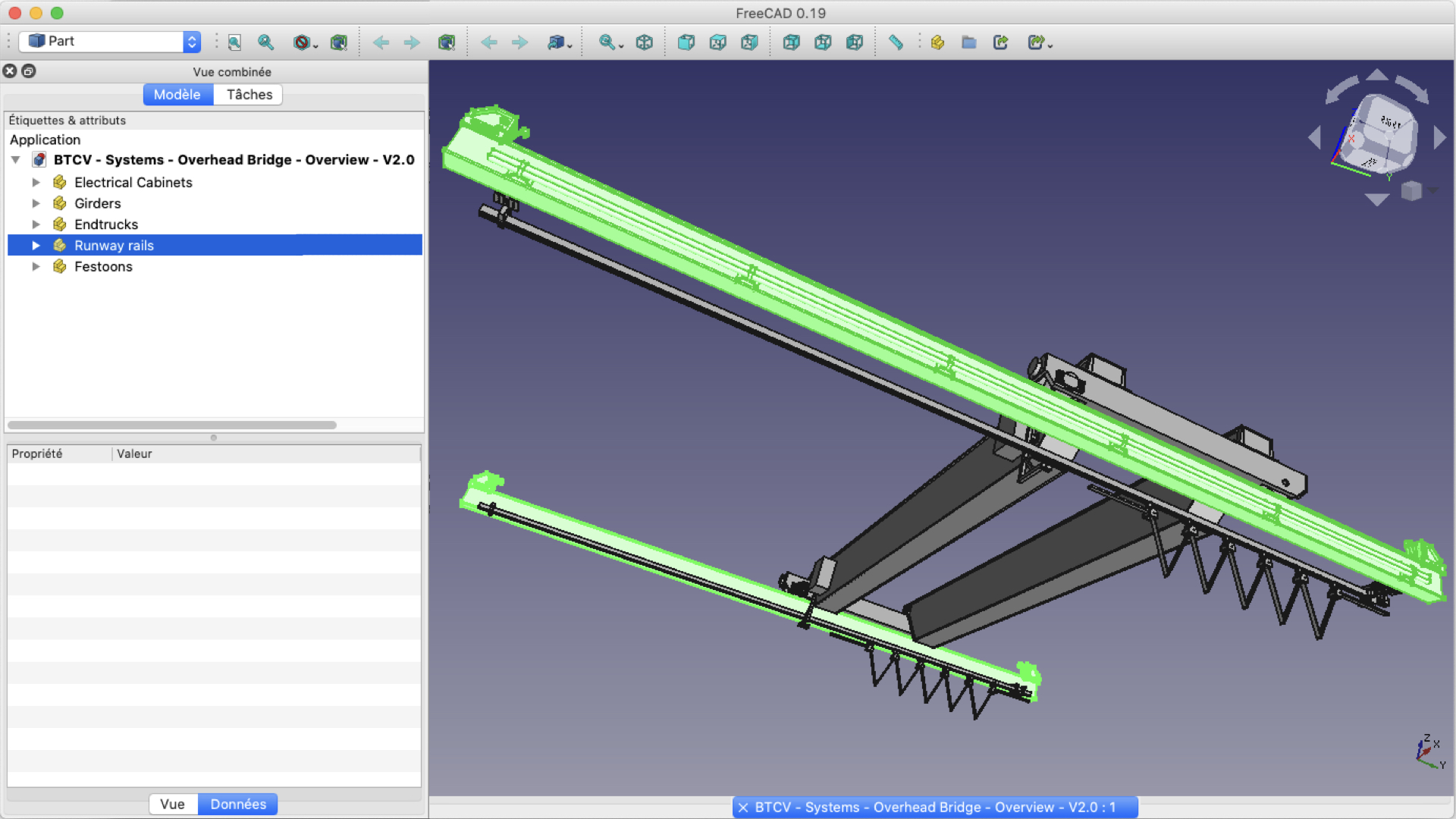
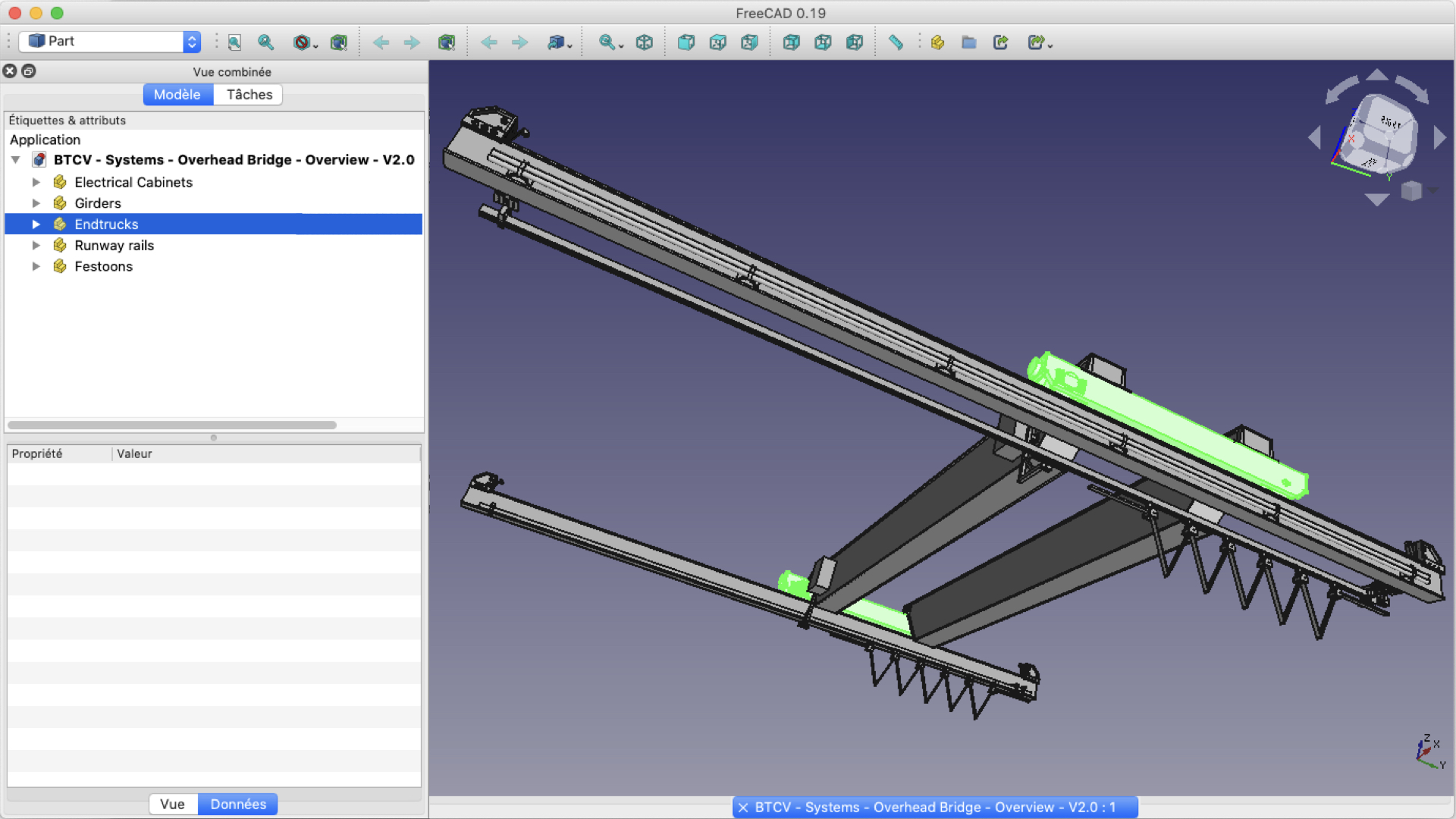
Vue générale du pont roulant
Screenshot n°1 : Armoires de raccordement électrique des moteurs
Screenshot n°2 : Festons de câbles électriques
Screenshot n°3 : Rails de guidage et butées de fin course
Screenshot n°4 : Sommiers du pont roulant
Screenshot n°5 : Poutres du pont roulant
Festons de câble
Vues générales
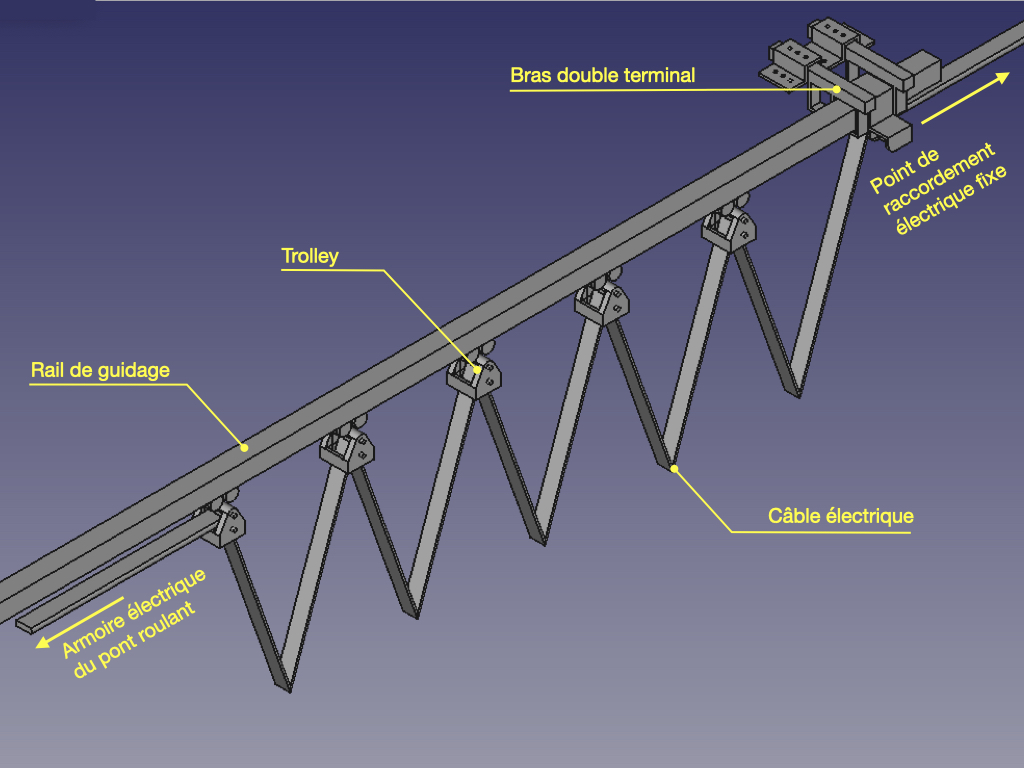
Cette vue en perspective axonométrique plongeante montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Cette vue en perspective axonométrique en contre plongée montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Vues de détails
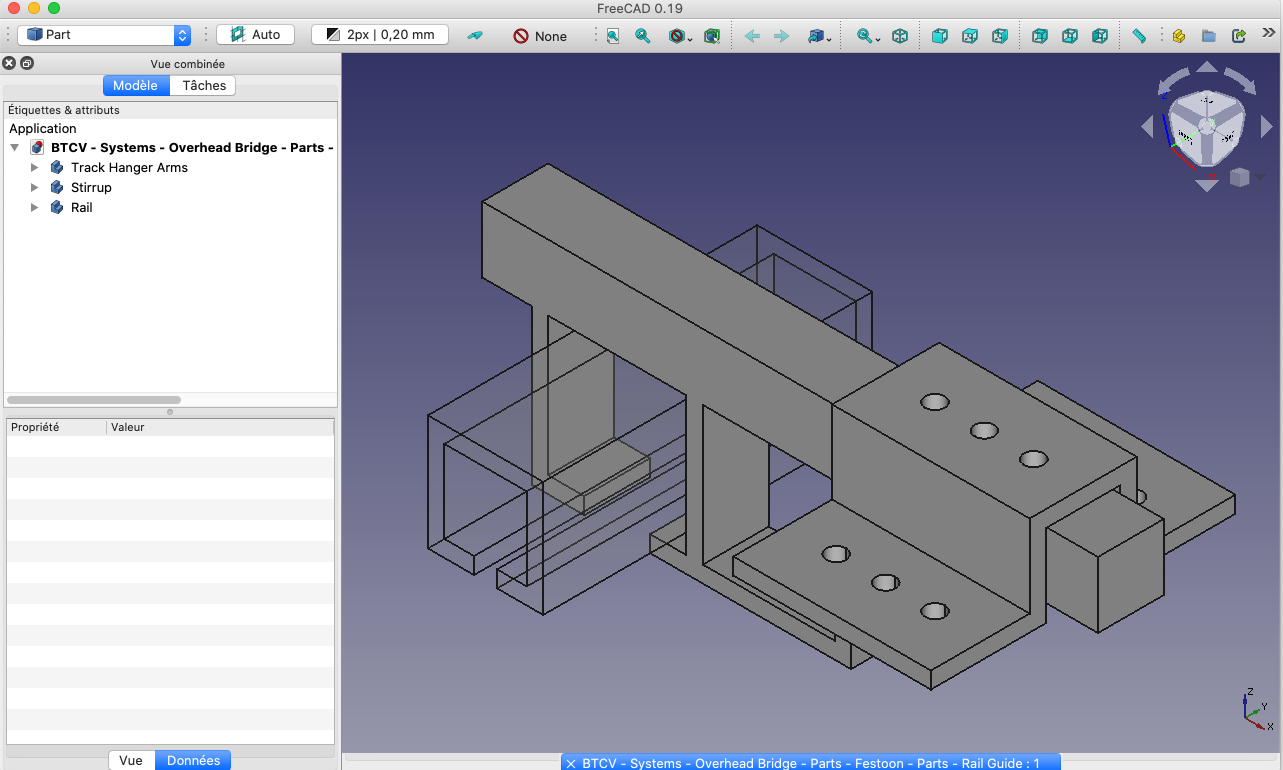
Bras de suspension des rails des festons des câbles
Les rails de guidage des festons de câble sont suspendus par des bras. Ces bras sont composés de deux parties : Le bras de suspension du rail et l’étrier de maintien du bras. Le design de ces deux pièces est conçu pour une réalisation par impression 3D. La fixation des étriers sur la structure du diorama est réalisée par des clous à tête suivant l’implantation des rangées de trou. Le nombre d’ensembles bras et étrier reste à définir en fonction des contraintes lors de la fabrication du modèle opérationnel.
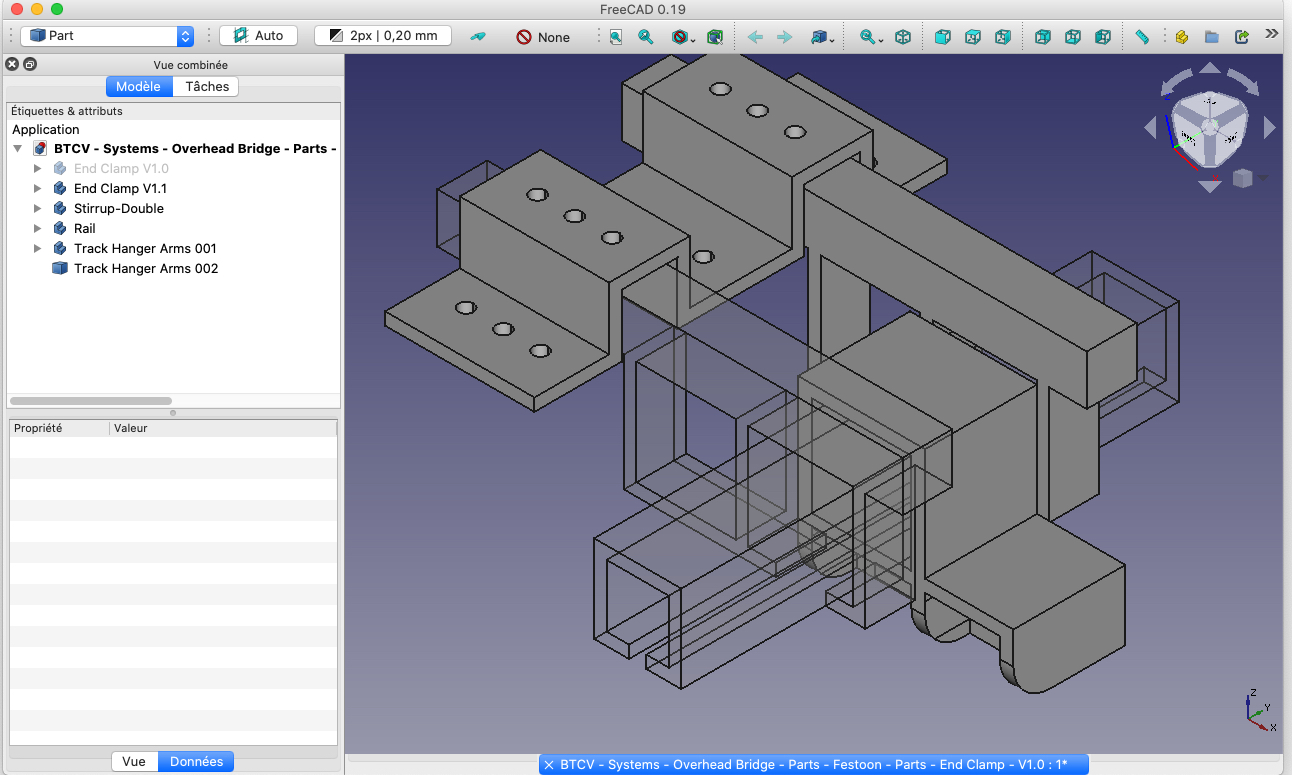
Bras de suspension terminaux des festons de câbles
Pour guider le câble vers son point de raccordement électrique et éviter toute tension due au déplacement du pont, deux bras de suspension du rail de guidage sont fixés par un étrier double. Un guide de câble est alors positionné sur le rail entre les deux bras. En passant dans ce guide, le câble est alors dirigé vers son point de raccordement, tout en étant maintenu en position face à la tension exercée sur le câble lors du déplacement du pont roulant.
Trolleys de roulement des festons
Pour garantir le guidage du câble le long de son rail, des trolleys sont utilisés pour supporter le câble et assurer son guidage grâce à 2 séries de 2 rouleaux enserrant la partie inférieure du rail de guidage. Le design de ces pièces est conçu pour une réalisation par impression 3D.
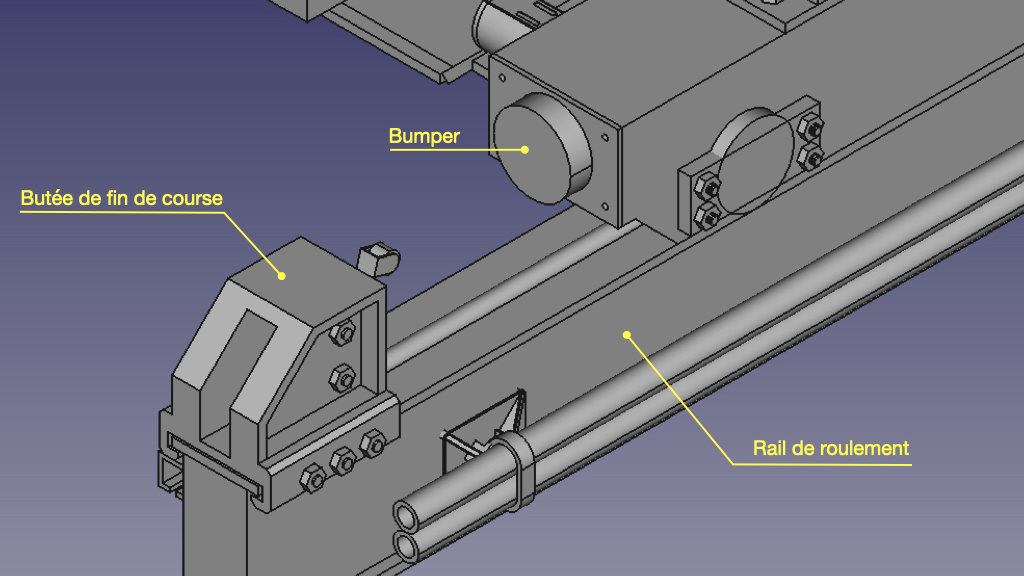
Butées de fin de course
Vues générales
Les butées de fin de course sont placées à l’extrémité des rails de roulement d’un pont roulant. Ces dispositifs constituent une limite physique dans le déplacement du pont roulant, servant de sécurités en empêchant le pont roulant de sortir de ses rails, chuter et faire chuter la charge qu’il transporte.
Les bumpers sont des tampons d’amortissement du choc du contact du pont roulant avec les butées de fin de course. Ils sont installés aux extrémités des deux sommiers du pont roulant (éléments moteur du pont roulant).
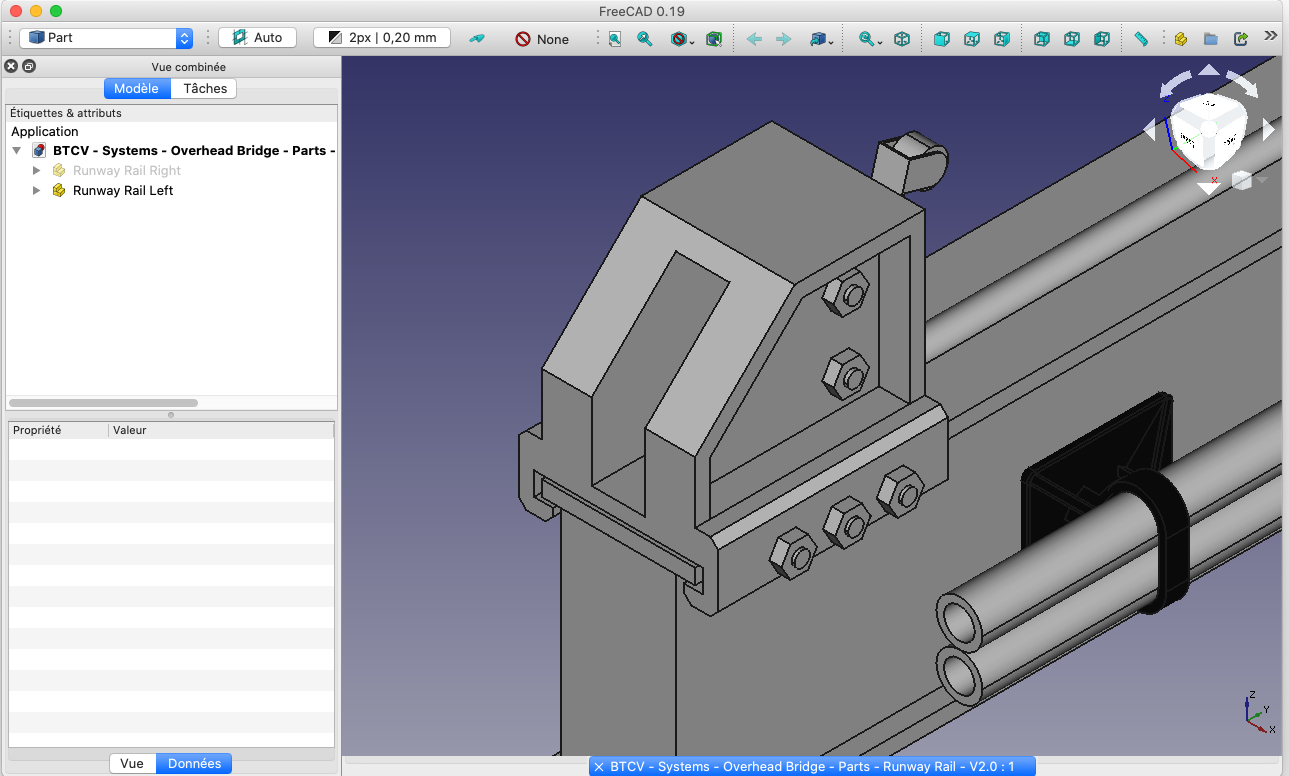
Vues de détails
Chacune des quatre butées de fin de course est équipée d’un capteur coupe circuit. Si le pont roulant vient jusqu’au contact d’une butée, il actionne alors son capteur qui coupe l’alimentation électrique des moteurs, entrainant l’arrêt du pont. Le design du corps de ces butées est conçu pour être réaliser par impression 3D. La fixation des butées sur la rail de roulement du pont est réaliser par 6 boulons M2. Le capteur électrique est inséré dans le corps de la butée, maintenu en position par 2 boulons M2.
Bumpers
Le design des bumpers est conçu pour être réaliser par impression 3D. Ils sont fixés sur les extrémités des sommiers par 2 rangées de 3 clous à tête.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Le design de toutes ces pièces ont été conçus pour être réaliser par impression 3D.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
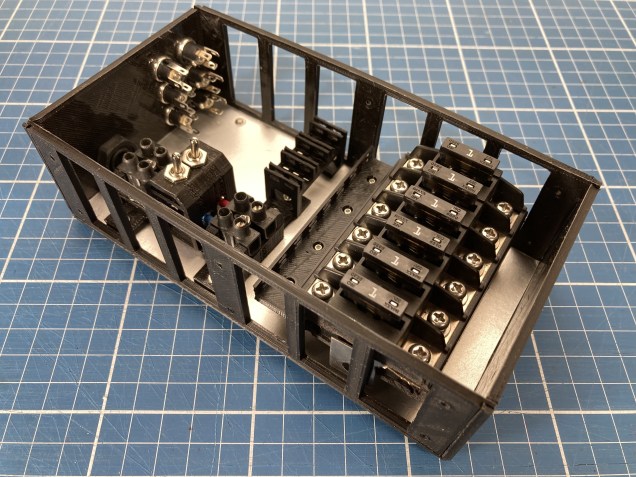
L’article présente la fabrication d’un prototype d’armoire de distribution électrique basse tension pour le diorama du projet BATLab112, conçu pour distribuer les tensions 5 VDC, 6 VDC et 12 VDC vers les consoles de commande. Il expose les retours d’expérience des prototypes antérieurs, l’impression 3D de la structure interne et la modification du design pour résoudre les échecs…
À l’issue de la phase de conception détaillée du modèle d’armoire de distribution électrique du diorama, l’objectif consiste désormais à réaliser un premier prototype fonctionnel. Cette étape vise à valider les choix techniques retenus avant la fabrication des quatre modèles opérationnels destinés à assurer la distribution des tensions 5 VDC, 6 VDC et 12 VDC vers les quatre consoles de commande des équipements industriels intégrés au diorama.
Retour d’expérience sur les armoires de raccordement électrique
Le retour d’expérience issu des prototypes antérieurs des armoires de raccordement du poste HT/BT a mis en évidence que l’absence de structure interne ne permet pas d’assurer une rigidité mécanique satisfaisante. Bien que l’enveloppe de ces armoires, réalisée à partir d’emballages de produits alimentaires, puisse apparaître suffisamment rigide lors de la phase de fabrication, cette rigidité s’avère insuffisante lors des phases de manipulation et d’exploitation. En conséquence, l’enjeu principal de la réalisation de ce prototype réside dans la validation de la faisabilité technique d’une structure interne réalisée par impression 3D.
Impression 3D de la structure interne d’une armoire électrique du diorama
Fabrication par impression 3D de la structure issue de la conception détaillée
Le design monobloc de la structure interne des armoires de distribution électrique a fait l’objet d’une analyse approfondie lors de la phase de conception détaillée. L’un des objectifs principaux de cette étude était de limiter la quantité de matière utilisée, en particulier celle associée aux éléments de support. À cet effet, la géométrie retenue se caractérise par des zones en surplomb conçues sous forme d’arches, ne nécessitant aucun support d’impression lors du procédé de fabrication additive. Cette approche permet ainsi d’éliminer toute production de matière résiduelle liée aux supports d’impression.
Deuxième impression 3D : analyse d’un échec de fabrication
Malgré l’attention particulière portée à la conception de ce design, la seconde tentative d’impression s’est soldée par un échec de fabrication. Lors de cette opération, la tête de l’imprimante 3D est entrée en collision avec le modèle en cours d’impression, comme l’illustre la photo associée. Afin de limiter les pertes de matière et de temps, aucune nouvelle impression de ce design n’a été engagée à ce stade.
À ce jour, la cause principale avancée pour expliquer cet incident semble être liée à la taille du fichier numérique stocké sur la carte SD utilisée par l’imprimante 3D Anet A8 du projet BATLab112. Il apparaît en effet que le lecteur de carte SD de la carte électronique de l’imprimante présente des dysfonctionnements lors de la lecture de fichiers volumineux, en particulier lorsque la carte a fait l’objet de multiples cycles d’écriture et de suppression.
Afin de prévenir la récurrence de ce phénomène, deux mesures correctives ont été mises en œuvre. La première consiste à recourir à des cartes SD de faible capacité (8 Go), dédiées exclusivement au stockage des fichiers définitifs avant impression, en limitant les opérations d’écriture. La seconde, détaillée dans le chapitre suivant, repose sur une modification du design du prototype visant à réduire les durées d’impression des pièces.
À la date de mise en ligne de cet article, l’application conjointe de ces deux actions a permis d’éliminer l’apparition de ce dysfonctionnement.
Évolution du design de la structure interne des armoires électrique du diorama
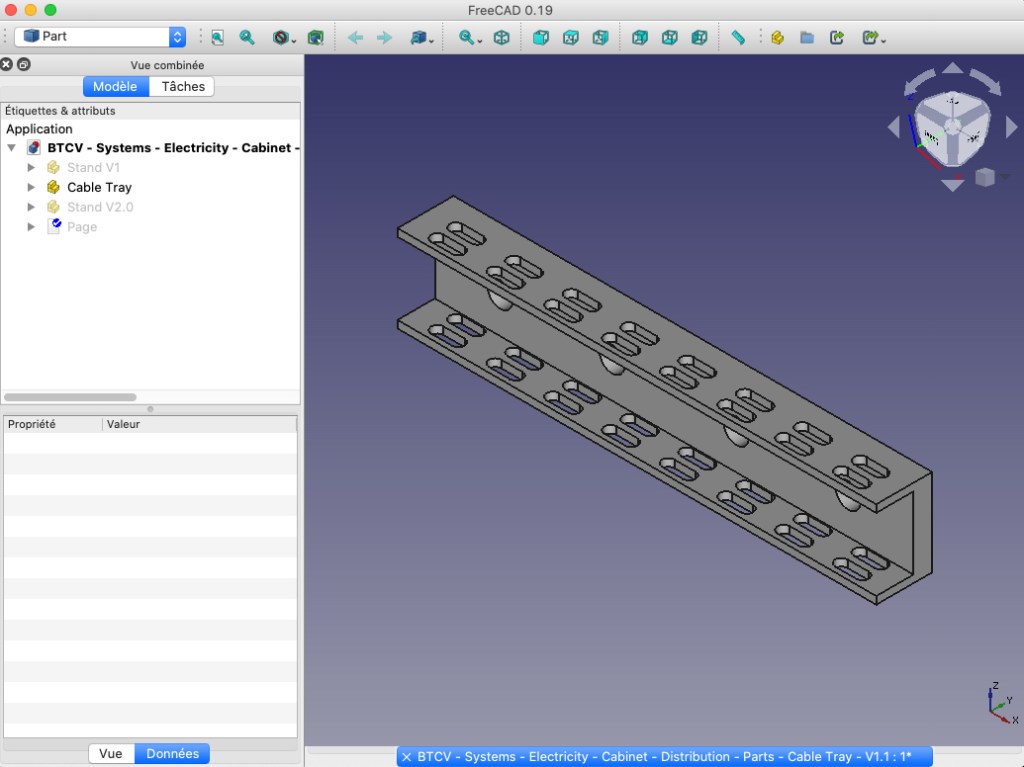
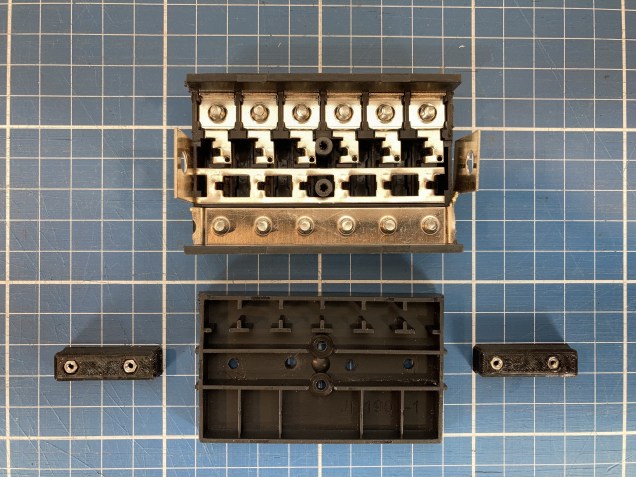
Le nouveau design résulte d’une approche alternative fondée sur la décomposition de la structure en plusieurs éléments distincts, comme l’illustre la capture d’écran de la vue éclatée réalisée à l’aide du logiciel FreeCAD. L’intérêt de cette démarche réside dans la conception de pièces de dimensions réduites et de géométrie majoritairement plane, permettant de diminuer les temps d’impression et de s’affranchir de l’utilisation de supports d’impression. En contrepartie, cette approche implique la définition et la conception des interfaces d’assemblage entre les différents éléments constitutifs de la structure.
Bien que cette méthode de conception ne permette pas d’exclure totalement la réapparition des dysfonctionnements précédemment observés, elle garantit néanmoins une réduction significative de l’impact potentiel en termes de durée d’impression et de quantité de matière susceptible d’être perdue.
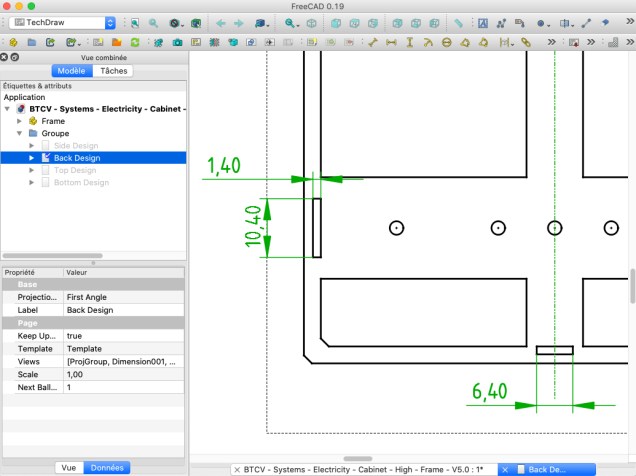
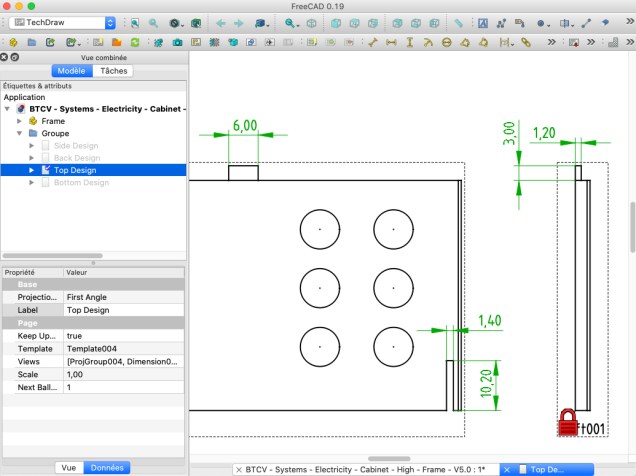
Modélisation 3D du nouveau design de la structure interne des armoires électriques du diorama avec FreeCAD
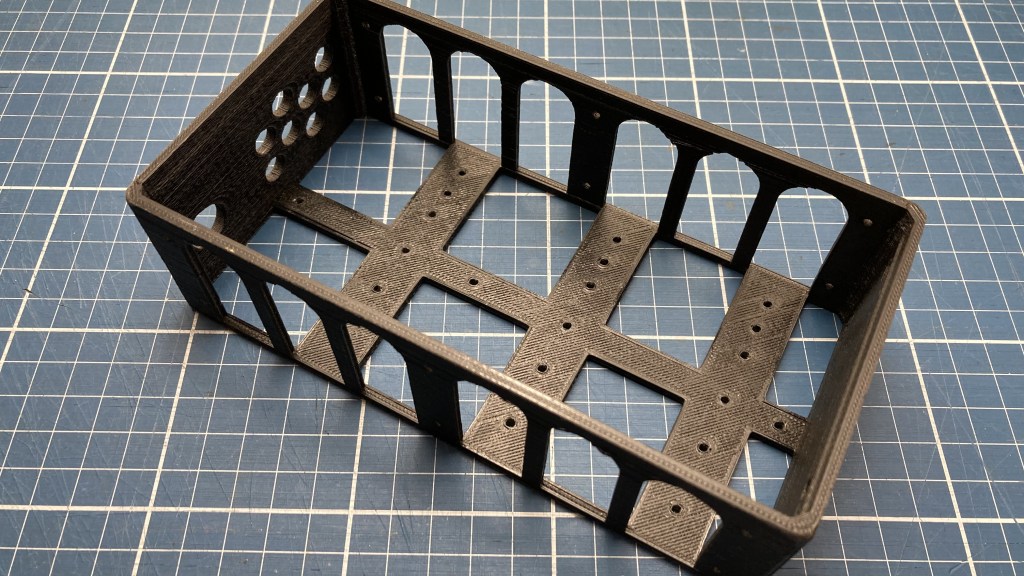
Impression 3D d’une structure modulaire des armoires électriques du diorama
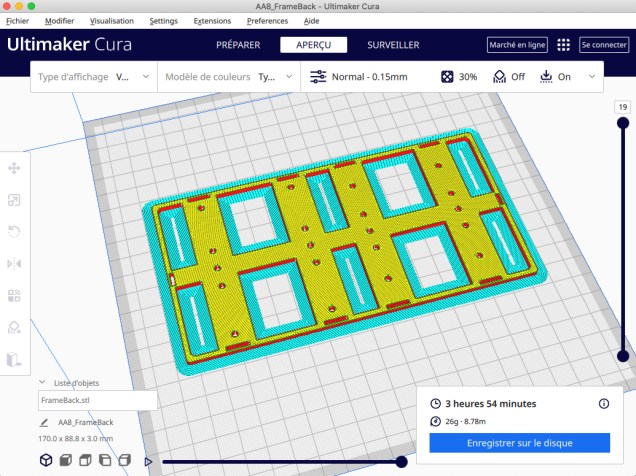
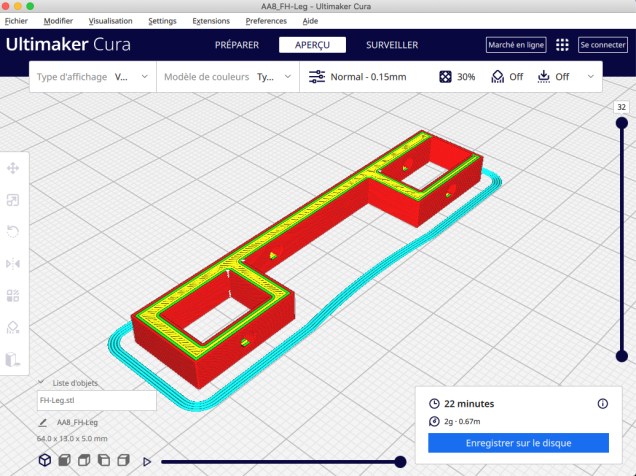
Préparation du fichier pour impression 3D avec Cura
Impression 3D des éléments de la structure modulaire
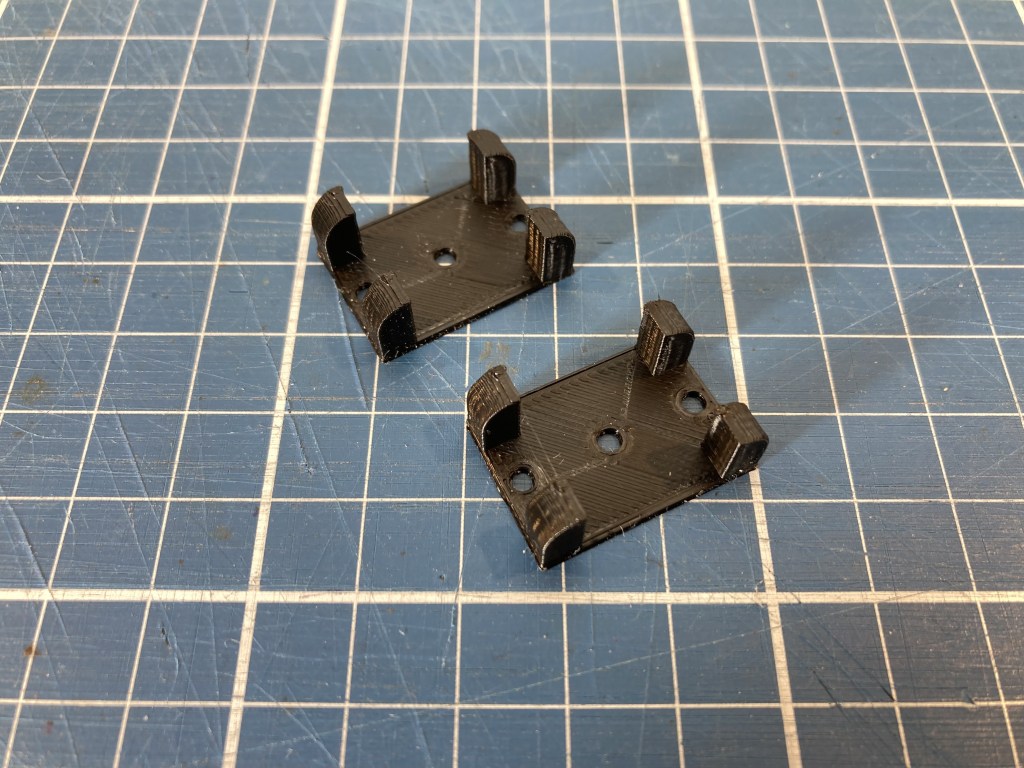
Chaque élément constituant la structure interne de l’armoire de distribution est imprimé individuellement. Les deux côtés de l’armoire présentent une symétrie identique, impliquant l’impression en double du même design. Afin de réduire les durées d’impression, les pièces ont été réalisées en qualité « Normal » avec une épaisseur de couche de 0,15 mm. Ce réglage n’offre pas le rendu optimal en termes de finition de surface, mais il reste satisfaisant, la structure interne n’étant ni visible de l’extérieur ni significativement perceptible de l’intérieur.
L’ensemble de ces pièces a été imprimé sans rencontrer la problématique observée précédemment avec le modèle monobloc, confirmant la pertinence de l’approche de décomposition du design.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
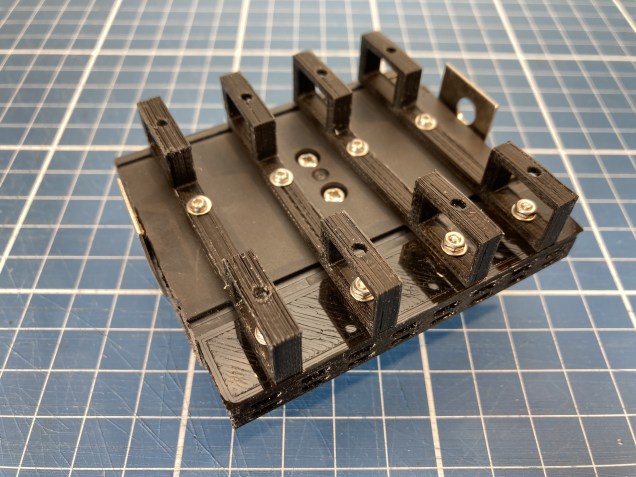
Assemblage de la structure des armoires électriques du diorama
L’assemblage de la structure est réalisé par emboitement des pièces. Les côtes des éléments d’assemblage tenon-mortaise ont été obtenues de manière empirique pour prendre en compte la précision d’impression.
Fabrication du module sectionneur des armoires de électrique du diorama
Impression 3D de la structure mécanique du sectionneur électrique
Pour des raisons de gestion des temps d’utilisation de l’imprimante, les pièces composant le sectionneur sont imprimées unitairement.
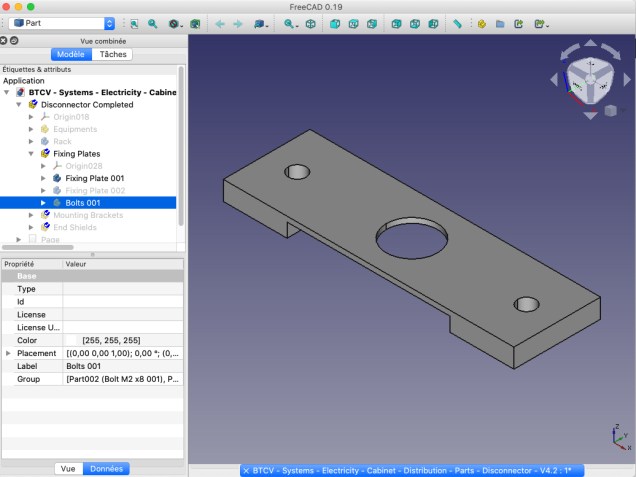
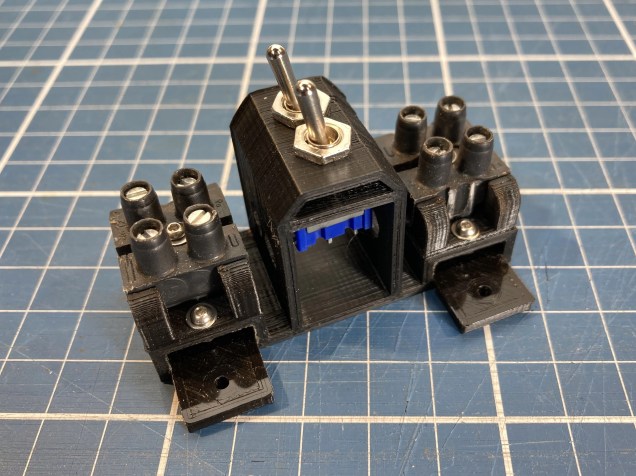
Assemblage des composants du sectionneur électrique
L’assemblage des différentes pièces du sectionneur est réalisé à l’aide de boulons de type M2. Les blocs de jonction électrique sont positionnés dans leurs supports respectifs, lesquels sont ensuite fixés sur le corps principal du sectionneur. Les deux interrupteurs sont maintenus par deux écrous chacun. Dans les modèles opérationnels, afin de prévenir tout desserrage des écrous susceptible de provoquer leur chute à l’intérieur de l’armoire électrique sous tension — et donc d’engendrer des courts-circuits —, l’utilisation de frein-filet est prévue sur l’ensemble des boulons.
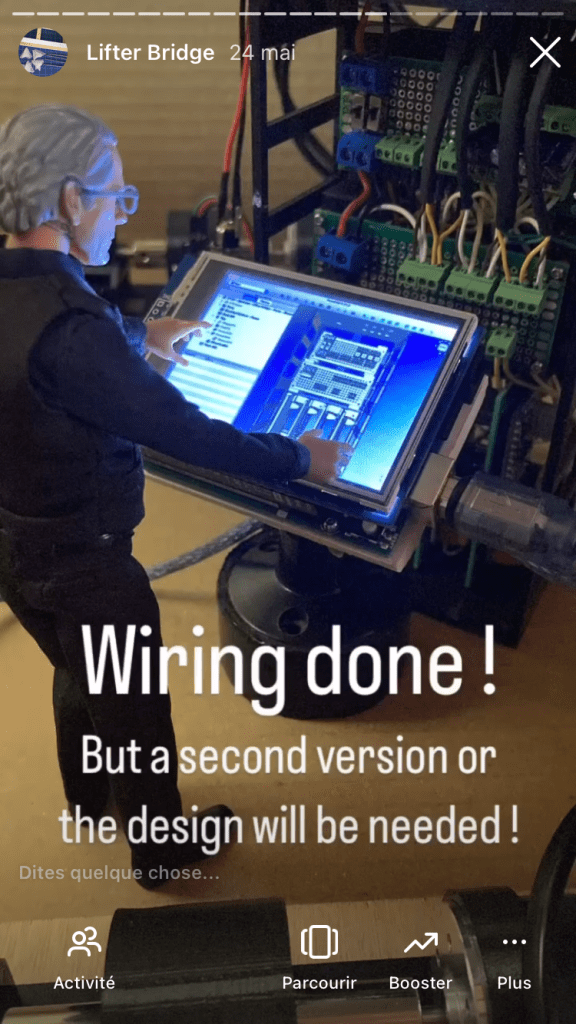
Câblage interne du module sectionneur électrique du diorama
Le câblage est réalisé à l’aide de conducteurs en cuivre rigide de couleur rouge et bleue, d’une section de 2,5 mm². Cette section dépasse les exigences des normes de câblage électrique, compte tenu du courant maximal de 6 A circulant dans ces conducteurs. Par ailleurs, cette configuration offre un rendu esthétique satisfaisant.
Fabrication du module porte fusible des armoires électrique du diorama
Lors de la phase de conception détaillée, le design du porte-fusible a fait l’objet d’une étude spécifique. Aucun des modules disponibles sur le marché ne répondait pleinement aux exigences du projet, tant en termes de nombre de voies que de dimensions. La fabrication d’un porte-fusible complet aurait été fastidieuse et aurait présenté un résultat incertain sur le plan des contraintes mécaniques et électriques. Par conséquent, le choix s’est porté sur l’utilisation d’un boîtier automobile à six voies avec point commun, dont l’enveloppe mécanique peut être modifiée afin de répondre aux contraintes d’intégration au sein de la structure de l’armoire.
Impression 3D des supports mécaniques du module porte fusible
Impression 3D des chemins de câble du module porte fusible
Assemblage du module porte fusible
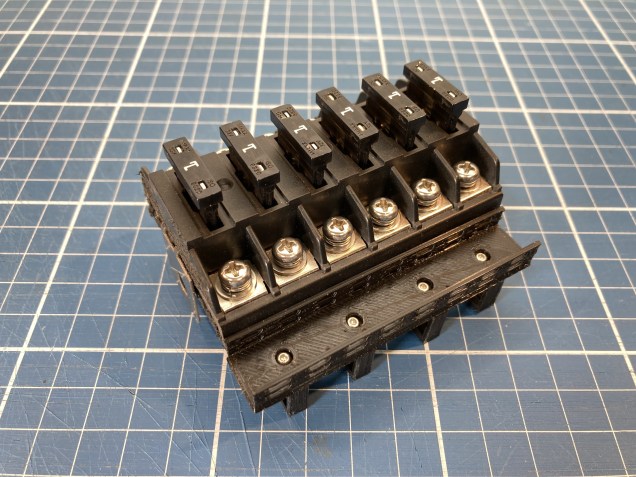
Assemblage final des modules composants une armoire de distribution électrique du diorama
Câblage interne d’une armoire de distribution électrique du diorama
Le bloc porte-fusibles est connecté à la sortie du sectionneur à l’aide de deux conducteurs en cuivre rigide de section 2,5 mm². L’emploi de cette section, identique à celle utilisée pour le sectionneur, assure la cohérence du câblage ainsi que le respect des normes électriques en vigueur. Par ailleurs, chaque connecteur de sortie de l’armoire est raccordé au bloc porte-fusibles au moyen de deux conducteurs de calibre 20 AWG.
Voir aussi
Des articles sur l’avancement du réseau électrique du diorama