Cet article présente la réalisation du prototype des bras robotiques qui équipent l’atelier de la Batcave du projet BATLab112. L’objectif de ce prototype est de permettre la validation de la conception du design général ainsi que le choix de fabrication par impression 3D.
Les bras robotiques disposent de 4 degrés de liberté, autrement dit 4 articulations. Un moteur installé dans chaque articulation en assure sa rotation.
Le choix des moteurs équipant les articulations est déterminant en terme de performance pour les bras robotiques en termes de vitesse et de fluidité des mouvements. Les moteurs sélectionnés pour la réalisation de cette première version sont des servomoteurs.
Servomoteurs
Qualification de ce choix
Avantages
Alimentation électrique en courant continu - Intégration technique facilité - Compatibilité avec l'électronique de commande (Arduino notamment) Asservissement en position angulaire - Commande simplifiée - Conforme avec la logique mécanique des articulations Maintien de la position - Commande simplifiée Dimensions réduites - Intégration mécanique facillité Approvisionnement et coût
Inconvénients
Technologie Cette technologie n'est pas conforme avec celle des robots industriels. Cet aspect sera pris en compte dans une futur version Couple Capacité incertaine à assurer le mouvement
Présentation de la réalisation de la première version de l’électronique de commande des bras robotisés équipant l’atelier de la Batcave du projet BATLab112.
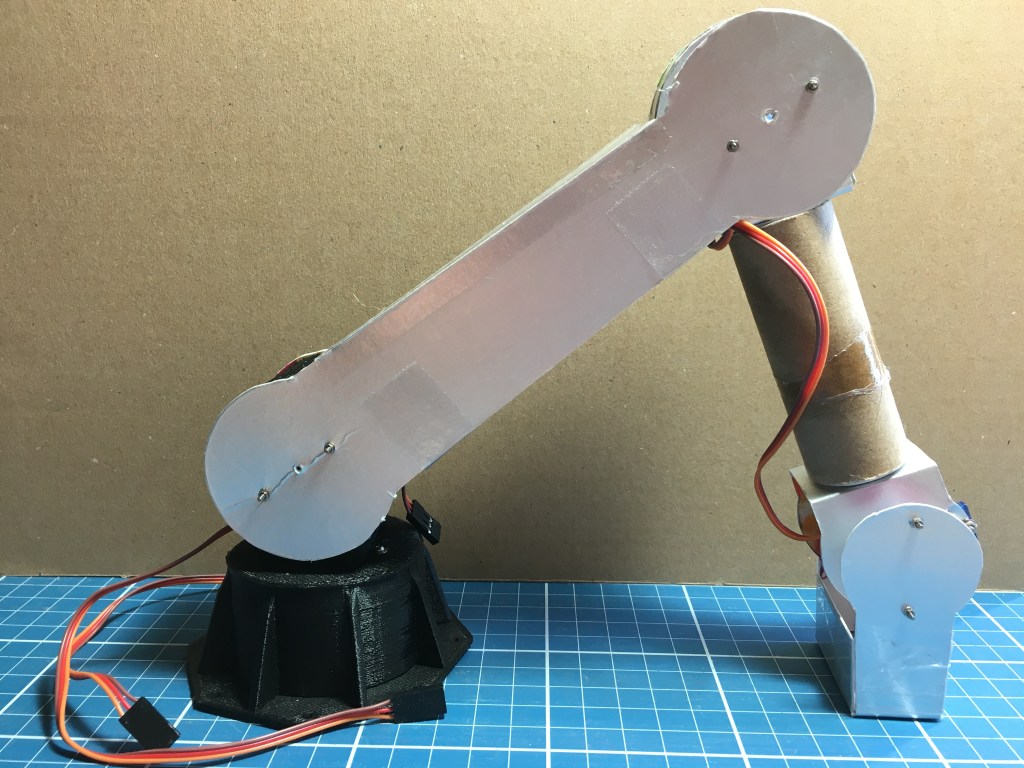
Pour valider cette électronique de commande, une maquette du bras robotique a été réalisée en emballage alimentaire. Le résultat obtenu est plutôt satisfaisant, compte tenu d’un niveau passable de qualité de fabrication, comme le montre la vidéo suivante.
Alimentation électrique
Le circuit d’alimentation électrique utilisé est le même que celui pour valider la commande électronique. Ce circuit est constitué des composants suivants :
Un convertisseur 230VAC / 12VDC – 180 W pour l’alimentation électrique des 2 convertisseurs suivants.
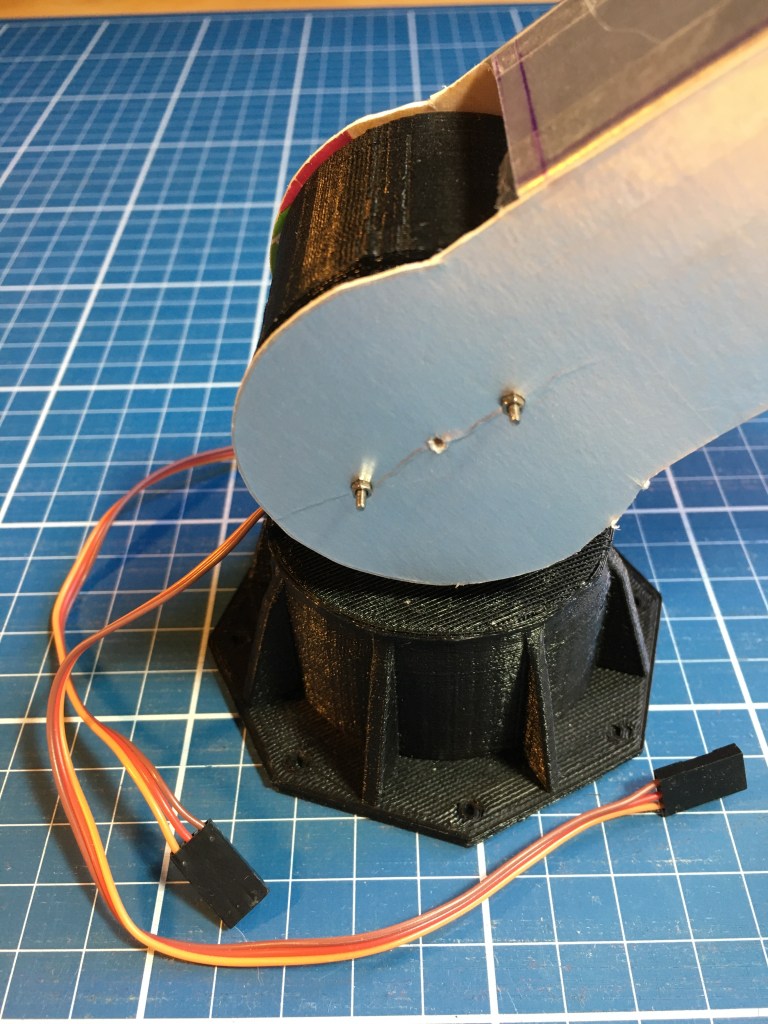
Le montage utilisé comprend la tourelle et l’épaule en impression 3D associé uniquement au bras, réalisé en emballage alimentaire.
Résultats
Les résultats des premiers tests sont plutôt décevants. Le bras entre en oscillation très rapidement. Plusieurs pistes sont à explorer pour résoudre ce problème : – Le découplage de l’alimentation électrique des servomoteurs. – La modification de la fréquence des signaux PWM émis par la carte Arduino. – Le changement du servomoteur de l’épaule.
La conception préliminaire de la console de commande fait suite à la phase d’étude préliminaire des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
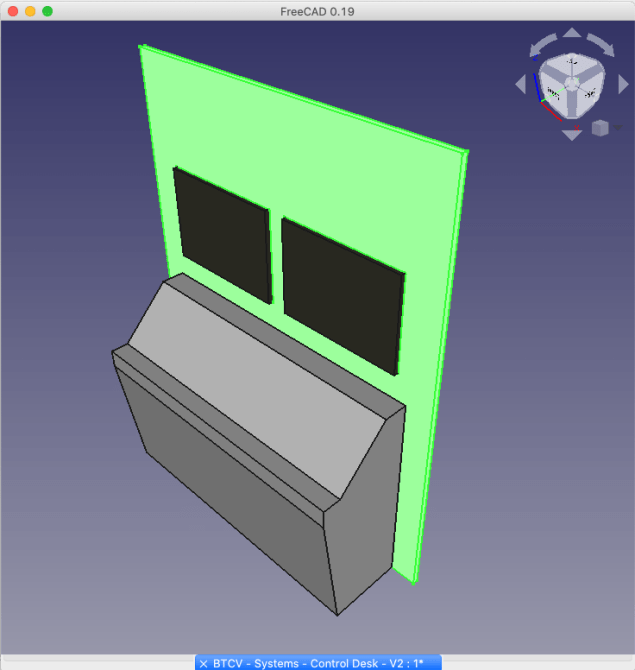
Vue générale
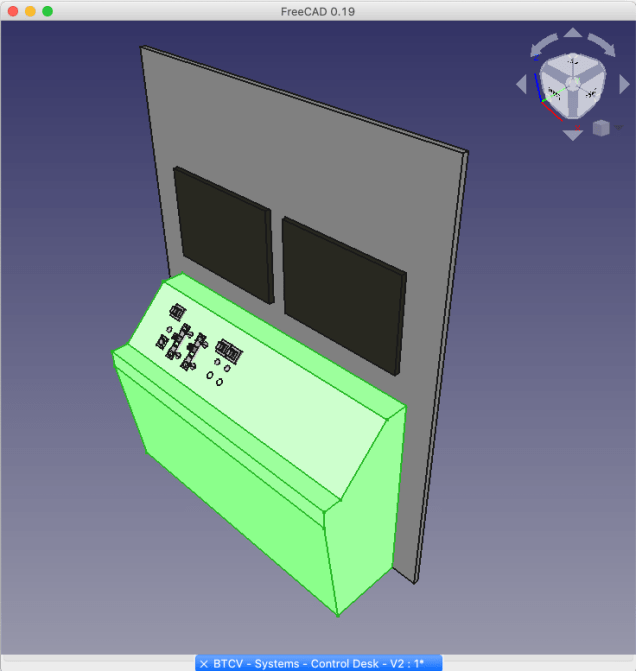
Le design retenu pour ce premier prototype, issu de la phase de benchmarking, est constitué de deux sous-ensembles : un pupitre et un panneau vertical.
Vues de détails
Pupitre
Le design du pupitre présente un panneau incliné pour supporter les commandes manuelles et un panneau avant légèrement incliné vers l’intérieur pour une meilleur approche de l’opérateur.
Panneau vertical
Le design panneau vertical est conçu pour intégrer deux écrans de contrôle et supporter deux cartes Arduino fixées à l’arrière.
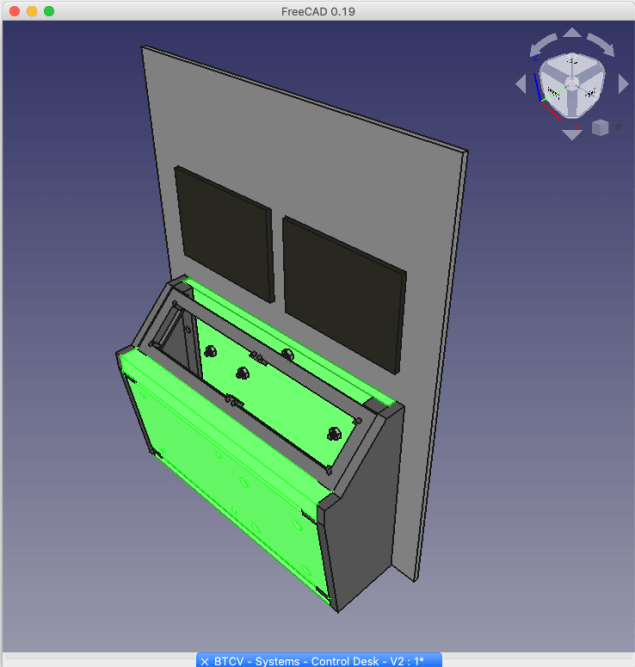
Structure du pupitre
Screenshot n°1
Screenshot n°2
Screenshot n°3
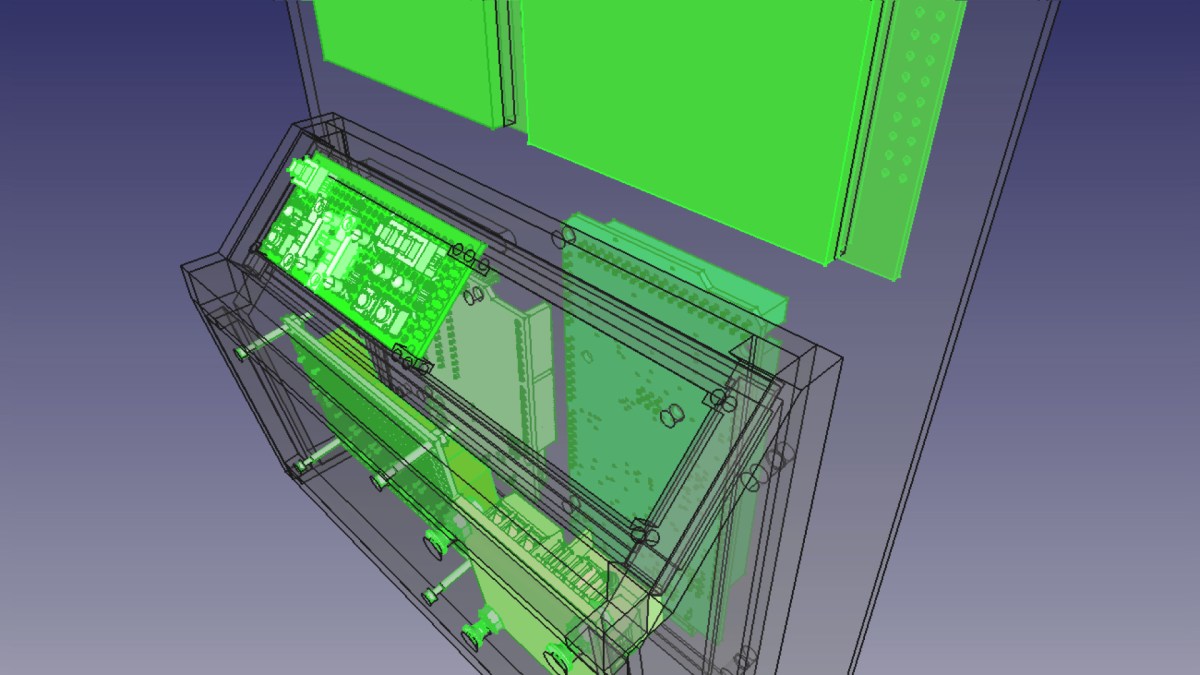
Le design des deux pièces latérales (screenshot n°1) donne la forme générale au pupitre selon les critères retenues lors de la phase benchmarking. Compte-tenu de la complexité du design de ces pièces, elles seront réalisées par impression 3D.
Le design du cadre incliné (screenshot n°2) est conçu pour pouvoir fixer 2 PCB au format 20×80 mm, côte à côte. Cette pièce sera aussi réalisée par impression 3D pour des raisons de précisions de réalisation.
Les autres pièces (screenshot n°3) constituant le pupitre, seront réalisées en bois pour assurer la robustesse de l’ensemble et faciliter le travail de percage lors de la fabrication du prototype.
Modélisation 3D
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Cet article présente la réalisation de la version 1 de l’électronique de commande des bras robotiques équipant le diorama de la Batcave du projet BATLab112.
L’objectif opérationnel est de réaliser une maquette électronique assurant la commande en mode manuel et en mode automatique des bras robotisés équipant le diorama de la Batcave du projet BATLab112. Cette maquette doit permettre dans un premier temps, une commande des bras robotiques suivant trois modes de fonctionnement : Mode manuel, Mode automatique, Mode apprentissage.
L’objectif pédagogique consiste à se familiariser avec les principes de commande des servomoteurs.
Spécifications fonctionnelles
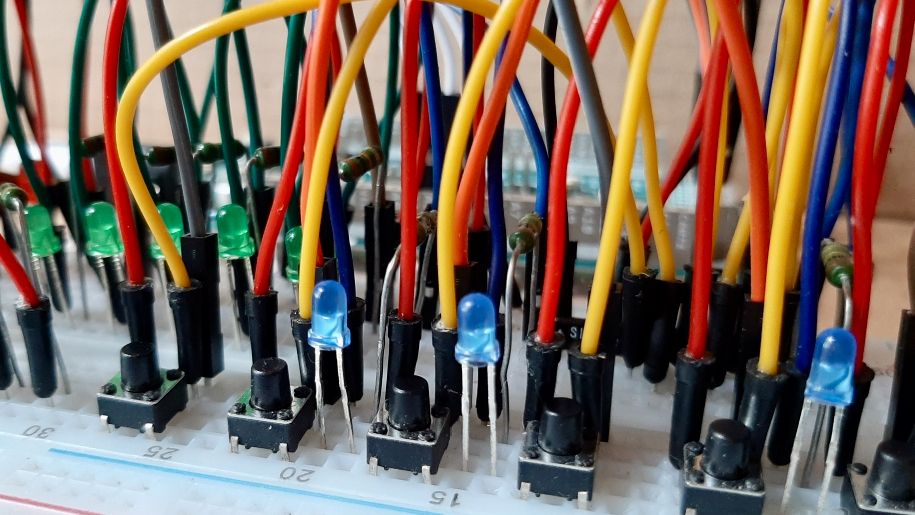
La sélection des différents mode de fonctionnement des bras robotiques par l’opérateur doit s’effectuer par des boutons poussoirs. Des voyants assurent la visualisation des états de fonctionnement.
Mode manuel
En mode manuel, les 2 bras robotiques sont commandés indépendamment. La commande des articulations est réalisée par l’intermédiaire de potentiomètres rotatifs. Cette commande doit s’effectuer en temps réel. La rotation de l’axe d’un potentiomètre doit entrainer la rotation de l’articulation correspondante.
Mode automatique
En mode automatique, les 2 bras robotisés sont commandés, indépendamment ou simultanément, suivant des consignes différentes. La commande des articulations est gérée par une unité de contrôle dans laquelle sont enregistrées l’ensemble des consignes nécessaires.
Mode apprentissage
En mode apprentissage, les 2 bras robotisés sont commandés indépendamment ou simultanément. L’enchainement des positions à apprendre pour chaque bras robotisé est défini par l’utilisation des commandes du mode manuel. La restitution de l’enchainement des positions enregistrées pour chaque bras est réalisée en mode automatique.
Spécifications techniques
Les actionneurs à commander
Chaque articulation des bras robotiques est équipée d’un servomoteur. Chaque bras est ainsi équipés de 4 servomoteurs.
Dans le cadre du projet BATLab112, les schéma électriques ou électroniques sont réalisés avec le logiciel KICAD. Vous pouvez télécharger le fichier du schéma de câblage au format PDF par le lien qui suit.
Le code présenté ici est une première approche pour mettre en oeuvre les fonctions nécessaires aux commandes des servomoteurs et valider le principe général de commande de la maquette. Ce code n’est donc pas optimisé.
Cette maquette est réalisée pour les besoins de la validation technique et fonctionnelle de l’électronique de commande associée au code développé pour la carte Arduino Due qui pilote l’ensemble.
Cette maquette est réalisée avec des emballages de briques de jus de fruit. Cette matière légère, est suffisamment résistante pour supporter les assemblages nécessaires (ruban adhésif + boulon). Elle présente aussi une face dont l’état de surface est semblable à celui de l’aluminium, ce qui donne un rendu plutôt satisfaisant.
Cette maquette ne respecte pas fidèlement le design conçu en modélisation 3D et présente des défauts de fabrication qui induisent des perturbations dans les mouvements telles que des vibrations.
La vidéo du mode automatique
Conclusions
Electronique de commande
Ces tests permettent de valider le montage de l’électronique de commande des servomoteurs.
Trois points d’améliorations sont identifiés pour être intégrés dans les futures versions.
Point n°1 : Commandes manuelles
Constat : Les actions sur les potentiomètres de commande des servomoteurs impliquent l’usage d’un tournevis.
Evolution : Equiper les potentiomètres de boutons
Points n°2 : Enregistrement des positions en mode automatique
Constat : Les positions prédéfinies du mode automatique nécessitent la programmation de la Carte Arduino Due.
Evolution : Disposer d’un interface plus élaboré que des boutons poussoirs pour enregistrer ces positions sans avoir recours à la re-programmation systématique de la carte (exemples : clavier + écran ou écran tactile).
Points n°3 : Enregistrement des positions en mode apprentissage
Constat : Le nombre de positions disponible dans le mode apprentissage est limité à 5, ce qui est insuffisant pour envisager des enchaînement de trajectoires complexes.
Evolution : Disposer d’un interface plus élaboré que des boutons poussoirs et des Leds pour enregistrer ces positions (exemples : clavier + écran ou écran tactile).
Arduino Due + Code
Ces tests permettent de valider l’utilisation de la Carte Arduino Due et sa capacité à supporter le code nécessaire à la commande des servomoteurs.
Un point d’amélioration est identifié pour être intégré dans les futures versions.
Point n°4 : Codage de trajectoire plus fluide
Constat : Dans la démonstration réalisée en mode automatique les servomoteurs sont pilotés les uns après les autres pour atteindre chacune des positions. Cette méthode induit des mouvements lents et décomposés.
Evolution : Développer un pilotage simultané des servomoteurs pour obtenir des mouvement plus fluides et rapides
Servomoteurs
Ces tests permettent de valider l’utilisation de 3/4 servomoteurs comme actionneurs des articulations des bras robotisés. Une effet, le servomoteur utilisé pour l’articulation de l’épaule semble manqué par moment de couple. Cependant, compte tenu de la qualité de fabrication de la maquette qui n’est pas optimum il est difficile de conclure.
La conception préliminaire de la plateforme rotative fait suite à la phase d’étude des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
Dimensionnement
Pour dimensionner le pont roulant bipoutre suspendu, de l’atelier automatique de la Batcave du projet BATLab112, le bras robotique le plus puissant (et le plus lourd) du marché à l’heure où cet article est édité, est pris comme référence. Ces bras robotiques ont une masse totale de 22000 kg. A cela il faut encore ajouter la masse de la charge utile. Si les bras robotiques doivent pouvoir soulever la Batmobile dont la masse du modèle le plus lourd est de 3000 kg, nous obtenons une masse utile de 25000 kg. En prenant en compte un coefficient de sécurité et compte-tenu des « normes » en terme de capacité de levage constatée, le pont roulant bipoutre pris en référence pour le projet BATLab112 aura donc une capacité de levage d’environ 40 tonnes.
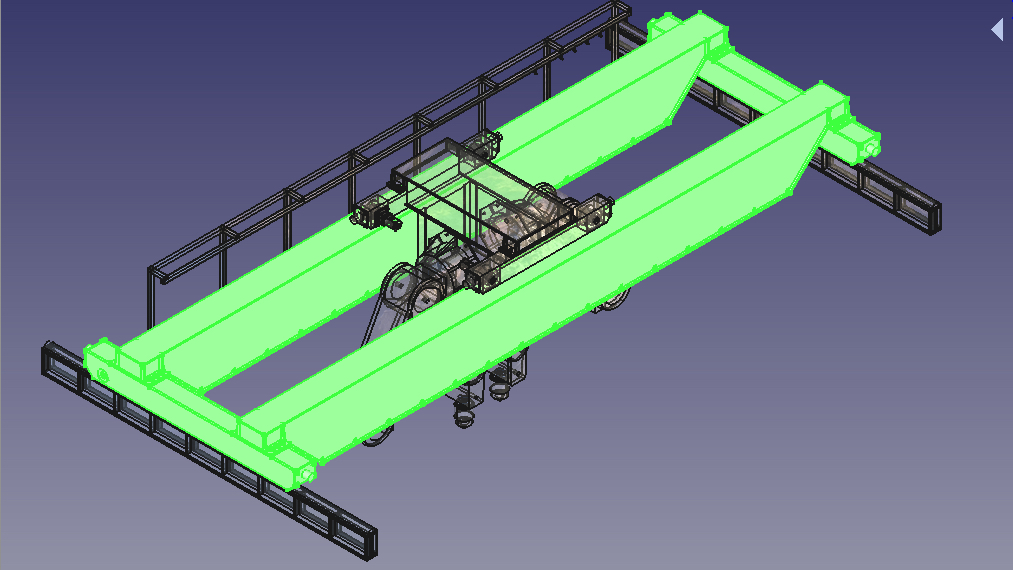
Ce premier design du sommier du pont roulant inclut déjà les empreintes des roulements à billes et des axes de rotation des roues. A ce stade de conception préliminaire, la faisabilité technique de fabrication de ce design n’a pas été évaluée.
Le design des poutres du pont roulant inclut les platines de fixation sur les sommiers.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Les bras robotiques du projet BATLab112 sont entièrement conçus pour répondre aux exigences du projet. Même si il existe de nombreux modèles commerciaux de bras robotiques dits d’apprentissage, la taille de ces modèles n’est pas forcément compatible avec l’échelle de réalisation au 1:12 du projet et leur esthétique n’est jamais conforme à celle d’un robot industriel.
Les bras robotiques disposent de 4 degrés de liberté, autrement dit 4 articulations. Un moteur installé dans chaque articulation en assure la rotation.
Modélisation 3D
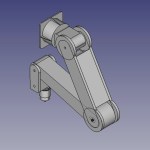
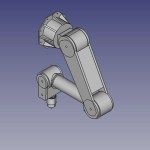
Evolution du design des versions des bras robotiques
Le design des bras robotiques est contraint par l’espace disponible dans l’atelier automatisé de la Batcave, notamment la hauteur sous plafond. A cette contrainte s’ajoute la contrainte de pouvoir accéder à tous les points de la surface de la Batmobile.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
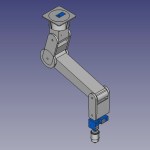
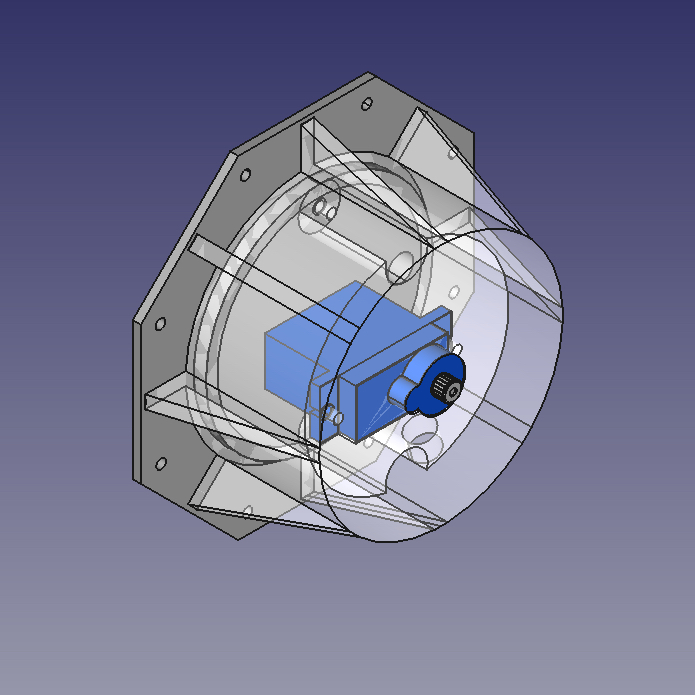
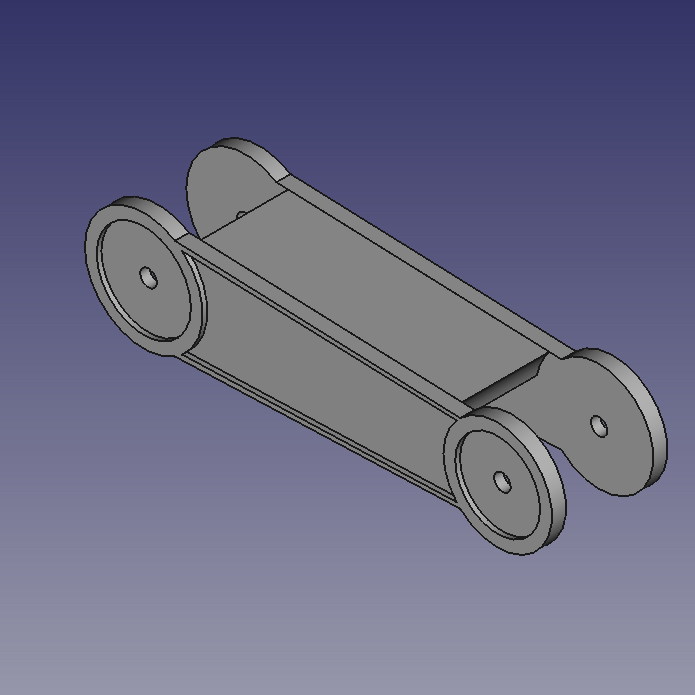
La base est la pièce qui assure la fixation du bras robotique sur le pont roulant bipoutre. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 1/2 de l’épaule.
Epaule
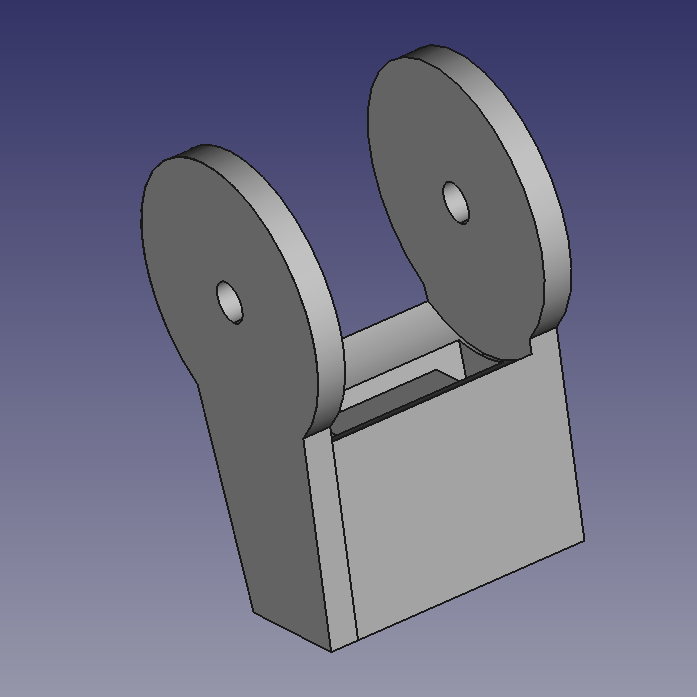
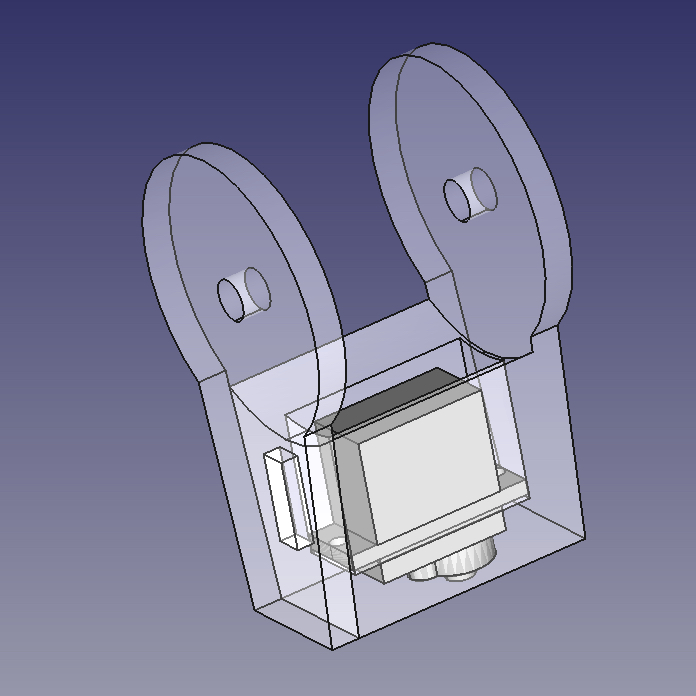
La pièce constituant l’épaule du bras robotique se fixe sur la base. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 2/2 de l’épaule.
Bras et Avant-bras
Coude
La pièce qui assure la rotation 1/1 du coude intègre le Troisième servomoteur.
Poignet
La pièce constituant le poignet intègre un éventuel cinquième servomoteur dont la présence dépendra du design final du préhenseur.
Préhenseur
La conception du préhenseur reste à faire. L’objectif est de concevoir ( ou d’utiliser un concept existant ) un préhenseur capable de de s’équiper de différents outils spécialisés.
Calcul de masse
Le calcul de la masse maximale de chacune des composantes mécaniques du bras ; épaule, bras, avant-bras, permet de sélectionner le matériau adéquat pour la fabrication de ces pièces et de les dimensionner plus précisément ; épaisseur, densité …
Configurations de calcul
Configuration n°1 :
Cette première configuration présente des conditions favorables de ce calcul : Le bras à l’horizontal et l’avant bras vertical. Le poids équivalent aux poids de ces deux pièces (P) s’exerce à une distance restreinte du point de rotation. Par conséquent, le couple exercé par le moteur de l’épaule est plus faible que dans la deuxième configuration.
Configuration n°2 :
Cette configuration présente des conditions défavorables de ce calcul : le bras et l’avant bras sont tendus à l’horizontale. Le poids équivalent aux poids des deux pièces, s’exerce à une distance plus grande que dans la première configuration. Par conséquent, le couple exercé par le moteur de l’épaule est plus important.
Remarque : Même si la deuxième configuration reste improbable compte tenu de l’implantation des bras robotiques dans le diorama, elle permet une estimation des valeurs limites.
Données et approximations pour ce calcul
Le bras et l’avant-bras du bras robotique ont la même longueur (L = 15 cm). Le bras et l’avant-bras du bras robotique ont la même masse (m) répartie de manière homogène. La masse du poignet ( et du préhenseur ) sont négligées.
Caractéristiques techniques d’un servomoteur
Le site affiche un couple sous 4,8V de 1kg/cm (voir extrait). L’unité utilisée n’est pas conforme avec celle d’un couple qui devrait être 1kg.cm. Nous utiliserons cette valeur pour la suite des calculs.
Calculs
Configurations 1 :
C = L/2 x m + L x m C = (L/2 + L) x m C = 3/2L x m m = C / 3/2L m = 1 / (3/2×15) m = 44g
Configuration 2 :
C = L/2 x m + 3/2L x m C = (L/2 + 3/2L) x m C = 2L x m m = C / 2L m = 1 / (2×15) m = 33g
Cet article de parangonnage des bras robotiques industriels analyse les principales typologies utilisées dans l’industrie afin d’alimenter la réflexion conceptuelle du projet BATLab112. Il définit le bras robotique comme un manipulateur articulé automatisé, largement employé sur les chaînes de production industrielles, notamment automobiles. L’étude distingue trois catégories majeures : robots de production en ligne, robots manipulateurs suspendus et robots de charges lourdes, en mettant en évidence leurs usages, contraintes spatiales et capacités fonctionnelles. Cette analyse comparative constitue une base de référence pour l’intégration scénographique et technique du diorama de la Batcave.… Lire la suite →
Bras robotiques industriels : principes généraux et champs d’application
Les bras robotiques industriels constituent des systèmes automatisés articulés conçus pour exécuter des tâches répétitives, précises et à forte valeur ajoutée dans des environnements de production. Ils sont largement utilisés dans des secteurs tels que l’automobile, l’aéronautique, l’électronique, la logistique ou encore l’agroalimentaire, où ils contribuent à l’optimisation des processus et à l’amélioration de la qualité.
Le fonctionnement d’un bras robotique repose sur une architecture cinématique composée de plusieurs axes motorisés, généralement électriques, permettant des mouvements de rotation ou de translation. Ces axes sont pilotés par une unité de contrôle programmable qui coordonne les trajectoires, la vitesse et les efforts appliqués. Le bras est équipé d’un effecteur terminal — pince, outil de soudage, ventouse, capteur ou autre dispositif spécialisé — adapté à la tâche à réaliser. Des capteurs intégrés assurent le retour d’information, garantissant précision, répétabilité et sécurité.
L’utilisation des bras robotiques vise principalement l’automatisation des opérations telles que l’assemblage, la manutention, le soudage, la peinture ou l’inspection. Leur intégration permet de réduire la pénibilité pour les opérateurs humains, d’accroître la productivité et d’assurer une qualité constante. De plus, les évolutions récentes, notamment en robotique collaborative, favorisent une interaction sécurisée entre l’homme et la machine, renforçant la flexibilité et l’adaptabilité des systèmes industriels contemporains.
Revue des typologies de bras robotiques industriels existants
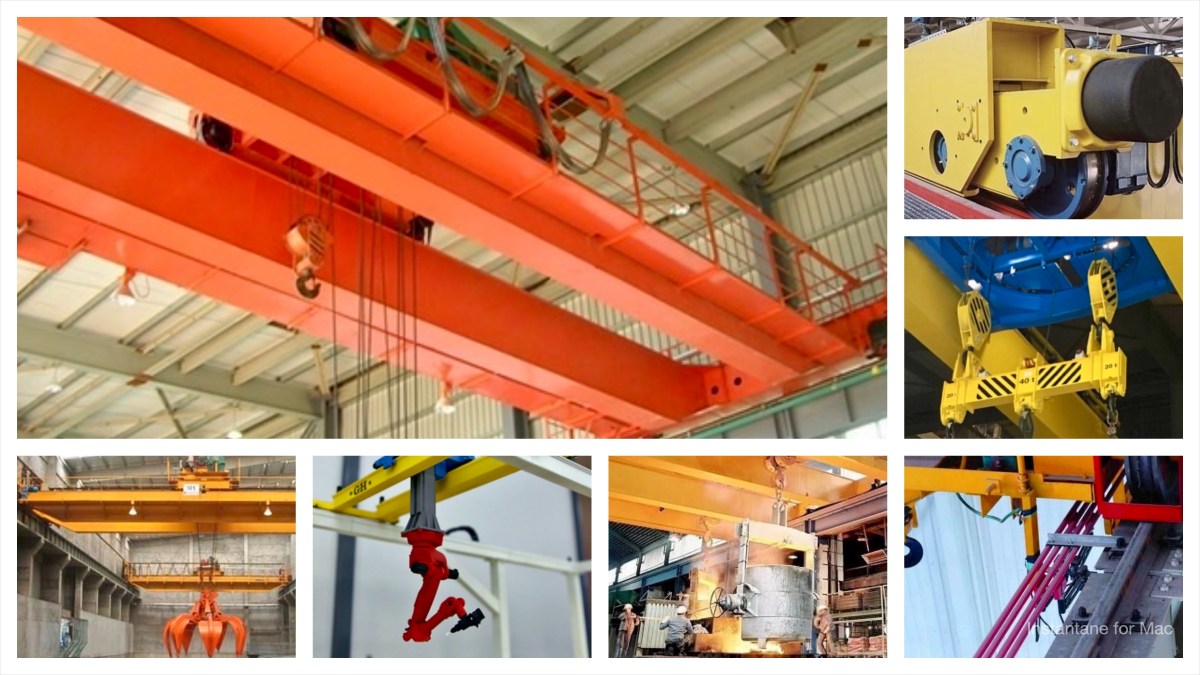
Typologies de bras robotiques industriels et domaines d’application
Robots de production en ligne
Les robots de production en ligne sont principalement intégrés au cœur des chaînes de fabrication automatisées. Ils sont conçus pour exécuter des tâches répétitives à haute cadence, telles que l’assemblage, le soudage, la peinture ou la manutention légère. Leur implantation est généralement fixe, optimisée pour un cycle de production continu et standardisé. Grâce à une programmation précise et à une forte répétabilité, ces robots contribuent à l’amélioration de la productivité, à la réduction des variations de qualité et à la sécurisation des processus industriels.
Robots manipulateurs suspendus
Les robots manipulateurs suspendus se distinguent par leur implantation en hauteur, généralement fixés à une structure porteuse, à un rail ou à un pont roulant. Cette configuration libère l’espace au sol et permet une intervention au-dessus des zones de travail. Ils sont particulièrement adaptés aux environnements contraints ou aux applications nécessitant une large zone de couverture, comme la manutention de pièces volumineuses ou l’intervention sur des ensembles complexes. Leur architecture favorise la flexibilité des trajectoires et une intégration efficace dans des systèmes industriels modulaires.
Robots de charges lourdes
Les robots de charges lourdes sont spécifiquement conçus pour la manipulation de masses importantes, pouvant atteindre plusieurs centaines de kilogrammes, voire plusieurs tonnes. Ils sont utilisés dans des secteurs tels que la sidérurgie, la construction mécanique, l’aéronautique ou l’automobile, pour le déplacement, le positionnement ou l’assemblage de composants de grande dimension. Leur conception privilégie la robustesse structurelle, la puissance des actionneurs et la fiabilité des systèmes de contrôle, garantissant des opérations sûres et précises malgré des contraintes mécaniques élevées.
Intérêt des robots manipulateurs suspendus et de charge lourde pour l’intégration au projet BATLab112
En conclusion, l’analyse des différentes typologies de bras robotiques industriels souligne le potentiel particulier des robots manipulateurs suspendus et des robots de charge lourde pour des applications complexes. Les manipulateurs suspendus offrent une grande liberté de déplacement au-dessus des zones de travail, optimisant l’espace et la flexibilité des interventions, tandis que les robots de charge lourde assurent la manipulation sécurisée de pièces volumineuses ou massives. La combinaison de ces deux caractéristiques présente un intérêt stratégique pour le projet BATLab112, en permettant l’intégration d’un système capable à la fois de se déplacer au-dessus du diorama et de manipuler des éléments lourds avec précision et sécurité.
Voir la suite des articles sur l’étape de parangonnage de la gestion du projet BATLab112
Cet article analyse la phase de parangonnage des ponts roulants industriels existants. L’étude comparative des différentes typologies et configurations permet d’identifier les solutions les plus pertinentes et innovantes. Ces résultats servent de référence et d’inspiration pour la conception du diorama de la Batcave dans le cadre du projet BATLab112, en facilitant le choix des systèmes de levage et des équipements adaptés à une représentation réaliste et fonctionnelle.… Lire la suite →
Le pont roulant constitue un équipement de manutention industrielle destiné au déplacement horizontal et vertical de charges lourdes ou encombrantes au sein d’un espace délimité, généralement un atelier, un entrepôt ou un site de production. Installé en hauteur, il se compose principalement de voies de roulement fixées à la structure du bâtiment, d’un ou plusieurs éléments porteurs, et d’un système de levage mobile. Par sa capacité à assurer des opérations répétitives de manutention avec précision et sécurité, le pont roulant occupe une place centrale dans les secteurs industriels tels que la métallurgie, la logistique lourde, la construction mécanique ou encore l’aéronautique.
Typologies structurelles des ponts roulants
Pont roulant monopoutre
Le pont roulant monopoutre repose sur une unique poutre porteuse, généralement réalisée en acier laminé ou soudé. Le mécanisme de levage, souvent un palan électrique, est suspendu sous la poutre ou déplacé sur un rail intégré. Cette configuration se distingue par sa relative simplicité de conception, son coût d’installation réduit et sa légèreté structurelle. Elle est particulièrement adaptée aux charges modérées et aux portées limitées, ainsi qu’aux environnements où la hauteur disponible sous plafond constitue une contrainte importante.
Toutefois, les capacités de charge et la rigidité globale d’un pont monopoutre demeurent inférieures à celles des configurations plus complexes, ce qui limite son emploi dans les contextes industriels exigeant la manutention de charges très élevées ou une précision extrême.
Pont roulant bipoutre
Le pont roulant bipoutre est caractérisé par la présence de deux poutres parallèles supportant un chariot de levage circulant sur leur partie supérieure. Cette architecture confère à l’ensemble une rigidité accrue et permet l’intégration de mécanismes de levage plus puissants. Elle autorise également une meilleure répartition des charges et une hauteur de levage optimisée, le système pouvant être positionné entre les poutres.
Grâce à ces caractéristiques, le pont roulant bipoutre est privilégié pour les charges lourdes, les grandes portées et les applications industrielles intensives. En contrepartie, son coût d’installation, de maintenance et les exigences structurelles du bâtiment sont généralement plus élevés que pour un pont monopoutre.
Systèmes de levage et dispositifs de préhension
Le système de levage constitue un élément déterminant du pont roulant, tant du point de vue fonctionnel que sécuritaire. Au-delà du mécanisme de montée et de descente proprement dit, divers dispositifs de préhension peuvent être intégrés afin de s’adapter à la nature des charges manipulées.
Levage par aimant
Les dispositifs de levage magnétique reposent sur l’utilisation d’aimants permanents ou électromagnétiques. Ils sont principalement employés dans l’industrie métallurgique pour la manutention de pièces ferromagnétiques telles que des tôles, des profilés ou des blocs d’acier. Ce système présente l’avantage d’un accrochage rapide et sans contact mécanique, réduisant ainsi les temps de manutention. Néanmoins, son usage demeure limité aux matériaux compatibles et requiert des dispositifs de sécurité renforcés en cas de coupure d’alimentation pour les aimants électromagnétiques.
Levage par pince
Les pinces de levage fonctionnent par serrage mécanique ou hydraulique de la charge. Elles sont adaptées à une grande diversité de formes et de matériaux, notamment les charges non ferromagnétiques ou présentant des géométries spécifiques. Les pinces peuvent être conçues pour exercer une pression contrôlée, minimisant ainsi les risques de déformation ou de glissement de la charge. Leur mise en œuvre requiert toutefois un réglage précis et une adaptation rigoureuse aux caractéristiques de l’objet manipulé.
Levage par bras robotisé
Dans les installations les plus avancées, le pont roulant peut être équipé d’un bras robotisé intégré au système de levage. Ce dispositif permet d’associer la capacité de manutention lourde du pont roulant à la précision et à la flexibilité de la robotique industrielle. Les bras robotisés sont utilisés pour des opérations complexes telles que l’assemblage, le positionnement de précision ou la manipulation de pièces délicates. Leur intégration implique cependant une automatisation poussée, des systèmes de contrôle sophistiqués et une analyse approfondie des risques.
Des détails
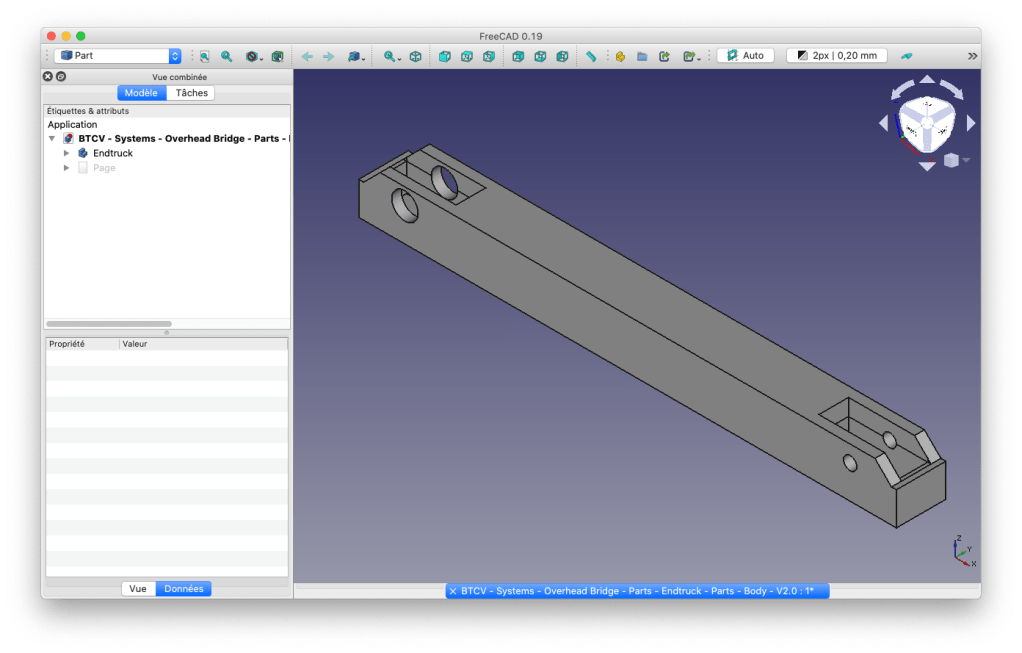
Les « End beams » et « Bumpers » dans un pont roulant : fonctions structurelles et dispositifs de sécurité
Dans un pont roulant, les End beams (poutres de tête) et les Bumpers (dispositifs d’amortissement de fin de course) jouent un rôle déterminant tant sur le plan structurel que sécuritaire. Les end beams constituent les éléments transversaux situés aux extrémités du pont roulant ; elles assurent la liaison entre les poutres principales et supportent les organes de roulement, permettant ainsi le déplacement de l’ensemble du pont sur les chemins de roulement. Elles contribuent directement à la stabilité, à la répartition des charges et à la précision des déplacements longitudinaux de l’équipement.
Les bumpers, quant à eux, sont des dispositifs de sécurité installés aux extrémités des courses du pont roulant ou du chariot. Leur fonction principale est d’absorber l’énergie cinétique en cas d’atteinte des limites de déplacement, notamment lors d’un arrêt d’urgence ou d’une défaillance de commande. Leur fonctionnement repose sur des systèmes amortissants — mécaniques, élastomères ou hydrauliques — qui réduisent les chocs, limitent les efforts transmis à la structure et participent à la protection des équipements ainsi qu’à la sécurité globale de l’installation.
Le feston dans un pont roulant : rôle fonctionnel et principe de fonctionnement
Dans un pont roulant, le feston constitue un dispositif essentiel destiné à l’alimentation et à la gestion des liaisons mobiles, notamment les câbles électriques, les conduites pneumatiques ou les réseaux de données. Son rôle principal est d’assurer l’acheminement continu de l’énergie et des informations vers les organes mobiles du pont roulant — en particulier le chariot et le palan — tout en accompagnant leurs déplacements longitudinaux ou transversaux.
Le fonctionnement du feston repose sur un système de câbles ou de tuyaux suspendus à des chariots ou galets se déplaçant le long d’un rail dédié. Cette configuration permet une mise en mouvement contrôlée et régulière des liaisons, limitant les contraintes mécaniques telles que la traction excessive, les torsions ou l’usure prématurée. Le feston garantit ainsi la fiabilité des transmissions, la sécurité de fonctionnement de l’installation et la durabilité des équipements, tout en s’adaptant aux amplitudes et aux cycles de déplacement caractéristiques du pont roulant.
Le trolley (chariot de translation) dans un pont roulant : rôle fonctionnel et principe de fonctionnement
Dans un pont roulant, le trolley, également désigné sous le terme de chariot de translation, constitue l’organe mobile assurant le déplacement transversal du dispositif de levage le long des poutres principales. Il supporte généralement le palan ou le treuil ainsi que les mécanismes associés, permettant ainsi de positionner avec précision la charge sur l’axe transversal de l’installation.
Le fonctionnement du trolley repose sur un ensemble de roues motorisées ou guidées se déplaçant sur les ailes inférieures des poutres du pont roulant. Son mouvement est assuré par un système d’entraînement électrique, complété par des dispositifs de guidage et de freinage garantissant la stabilité, la sécurité et la précision des déplacements. Le trolley joue un rôle central dans la cinématique globale du pont roulant, en combinant mobilité, maîtrise de la charge et continuité opérationnelle, tout en contribuant à l’efficacité et à la polyvalence des opérations de manutention.
Pont roulant bipoutre et bras robotique : optimisation de l’espace
Cet exemple illustre un système reposant sur l’intégration d’un bras robotique monté sur un pont roulant de type bipoutre. Une telle configuration présente un intérêt particulier dans la perspective de son intégration au sein du diorama du projet BATLab112. En effet, elle permet le déplacement d’un ou de plusieurs bras robotiques au-dessus de la Batmobile, offrant ainsi une couverture fonctionnelle étendue de l’ensemble du véhicule. Cette approche contribue à réduire le nombre de bras robotiques nécessaires pour les opérations d’intervention, tout en s’affranchissant des contraintes liées à l’occupation de l’espace au sol, lesquelles constituent un enjeu majeur en matière d’optimisation spatiale et de lisibilité scénographique.
Voir la suite des articles sur l’étape de parangonnage de la gestion du projet BATLab112
Voir tous les articles de la gestion du projet BATLab112 sur la conception du pont roulant bipoutre équipant le diorama de la Batcave
Le poste HTA/BT : composition, fonctionnement et rôle
Introduction
Un poste HTA/BT constitue un élément fondamental des réseaux de distribution d’énergie électrique, assurant l’interface entre le réseau de moyenne tension et les installations alimentées en basse tension. Il a pour fonction principale d’abaisser le niveau de tension issu du réseau public de distribution HTA — généralement compris entre 15 et 20 kV — vers des niveaux de tension BT adaptés à l’alimentation des équipements industriels, tertiaires ou résidentiels.
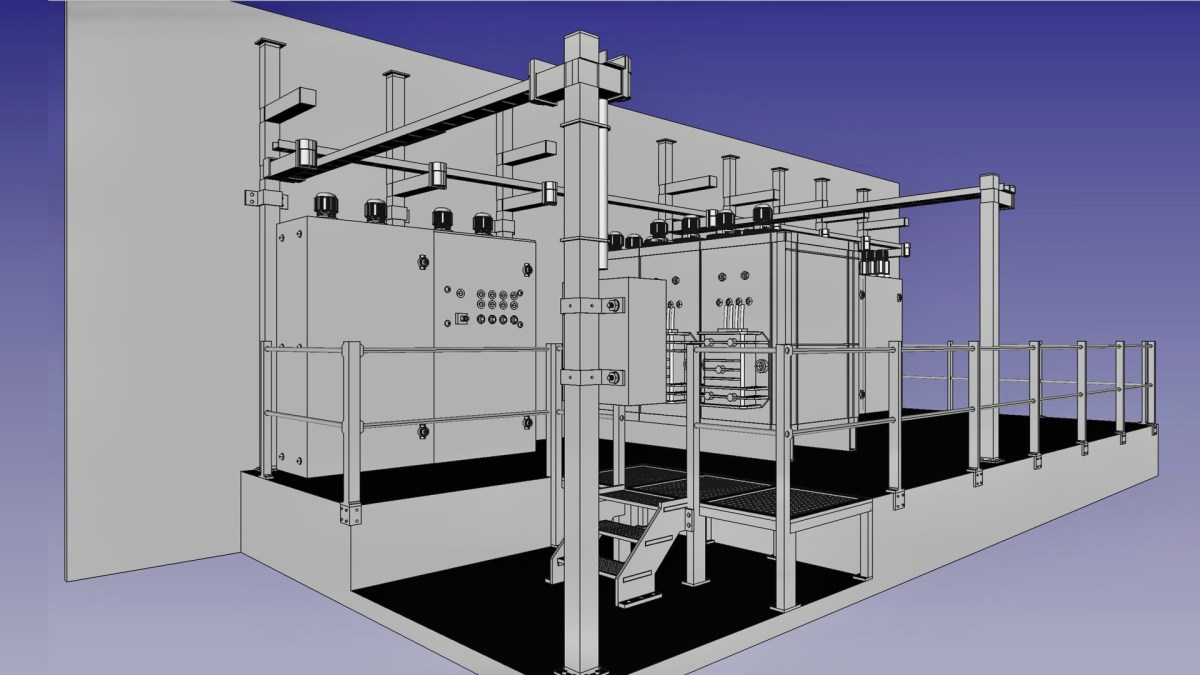
Composition d’un poste HTA/BT
Sur le plan de la composition, un poste HTA/BT est structuré autour de plusieurs sous-ensembles fonctionnels. Il comprend en premier lieu un dispositif d’arrivée HTA, intégrant des organes de coupure, de sectionnement et de protection, tels que des cellules HTA équipées d’interrupteurs-sectionneurs ou de disjoncteurs. Le transformateur HTA/BT constitue l’élément central du poste : il assure la transformation électromagnétique de la tension, tout en garantissant l’isolement électrique entre les réseaux amont et aval. En aval du transformateur, les tableaux BT regroupent les dispositifs de protection, de répartition et de commande des départs basse tension, ainsi que les instruments de mesure et de supervision.
Fonctionnement d’un poste HTA/BT
Le fonctionnement d’un poste HTA/BT repose sur une chaîne continue de conversion, de protection et de distribution de l’énergie électrique. L’énergie est acheminée depuis le réseau HTA, contrôlée et protégée à l’entrée du poste, puis transformée en basse tension avant d’être distribuée vers les différents circuits utilisateurs. Les dispositifs de protection assurent la détection et l’élimination des défauts électriques, contribuant à la sécurité des personnes et à la préservation des équipements.
Conclusion
Le rôle du poste HTA/BT dépasse la simple conversion de tension. Il constitue un nœud stratégique du réseau de distribution, garantissant la continuité de service, la sélectivité des protections et la qualité de l’énergie délivrée. À ce titre, le poste HTA/BT s’inscrit comme une infrastructure indispensable à la fiabilité et à la performance globale des systèmes électriques qu’il alimente.
Des exemples inspirant pour le diorama du projet BATLab112
La première photographie illustre un transformateur haute tension dont la conception des modules d’ailettes de refroidissement, disposés sur les flancs, retient particulièrement l’attention. Cette architecture thermique présente en effet de fortes analogies avec celle de convertisseurs à courant continu, susceptibles d’être retenus pour le développement du poste électrique du projet BATLab112, tant du point de vue fonctionnel qu’esthétique.
La deuxième photographie présente un module d’alimentation électrique de secours transportable. Son design constitue une source d’inspiration pertinente pour la conception du convertisseur électrique du projet BATLab112. La géométrie cubique de l’enveloppe favorise une organisation rationnelle du volume interne, permettant l’intégration de l’ensemble des sous-systèmes requis, tels que le convertisseur de tension, les cartes électroniques de relais de commutation et les borniers de câblage. Par ailleurs, le caractère transportable de ce module apparaît pleinement compatible avec les contraintes spécifiques d’installation dans un environnement de type souterrain ou cavernicole.
La troisième photographie montre l’implantation générale d’un transformateur et des armoires de contrôle associées. L’organisation linéaire de l’ensemble, combinée à une disposition compacte et resserrée des armoires, suggère des pistes d’optimisation de l’encombrement global. Cette approche pourrait être transposée avantageusement à la conception du poste électrique du projet BATLab112, en vue d’une utilisation plus efficiente de l’espace disponible.
Armoire industrielle et distribution électrique
Introduction
Dans les installations industrielles, la distribution de l’énergie électrique constitue un enjeu majeur en matière de sécurité, de continuité de service et de performance des systèmes. L’armoire industrielle de distribution électrique s’inscrit au cœur de cette problématique en assurant l’interface entre la source d’alimentation et les équipements consommateurs. Conçue selon des normes strictes, elle regroupe l’ensemble des dispositifs nécessaires à la protection, à la commande et à la répartition de l’énergie électrique au sein d’un site industriel.
Rôle d’une armoire industrielle de distribution électrique
Le rôle principal d’une armoire industrielle de distribution électrique est d’assurer une distribution fiable, sécurisée et maîtrisée de l’énergie électrique vers les différents circuits et équipements d’une installation. Elle permet notamment :
la répartition de l’énergie électrique vers plusieurs départs,
la protection des personnes et des biens contre les défauts électriques,
la commande et le contrôle des équipements alimentés,
la surveillance et le diagnostic du fonctionnement du réseau électrique interne.
En centralisant ces fonctions, l’armoire de distribution contribue à la continuité d’exploitation des installations industrielles et facilite les opérations de maintenance, d’évolution ou de dépannage.
Description et constitution de l’armoire
Une armoire industrielle de distribution électrique se présente sous la forme d’une enveloppe métallique ou isolante, conçue pour protéger les composants internes contre les agressions extérieures (poussières, humidité, chocs mécaniques) et garantir la sécurité des opérateurs. Son degré de protection est défini par des indices normalisés, tels que l’indice IP ou IK.
À l’intérieur de l’armoire, les principaux éléments constitutifs sont :
les dispositifs de coupure et de sectionnement, permettant l’isolement électrique de l’installation ou d’un circuit spécifique ;
les appareils de protection, tels que disjoncteurs, fusibles et dispositifs différentiels, destinés à protéger contre les surintensités, les courts-circuits et les défauts d’isolement ;
les organes de commande et de contrôle, incluant relais, contacteurs, automates programmables ou modules de commande ;
les dispositifs de mesure et de signalisation, assurant le suivi des grandeurs électriques et l’information de l’état de fonctionnement ;
les systèmes de câblage et de répartition, tels que jeux de barres, borniers et chemins de câbles, garantissant une distribution structurée de l’énergie.
L’agencement interne est réalisé selon des règles précises visant à optimiser la dissipation thermique, la lisibilité des circuits et l’accessibilité pour la maintenance.
Principe de fonctionnement
Le fonctionnement d’une armoire industrielle de distribution électrique repose sur une chaîne logique et hiérarchisée de traitement de l’énergie. L’alimentation électrique, issue du réseau ou d’une source de production locale, pénètre dans l’armoire par un organe de coupure général. Cette arrivée est ensuite dirigée vers les dispositifs de protection principaux, qui assurent la sécurité globale de l’installation.
Après cette étape, l’énergie est distribuée vers différents départs électriques, chacun étant protégé et, le cas échéant, commandé indépendamment. Les dispositifs de commande permettent l’activation ou la désactivation des circuits en fonction des besoins opérationnels, tandis que les systèmes de protection interrompent automatiquement l’alimentation en cas de défaut.
Par ailleurs, les dispositifs de mesure et de supervision assurent une surveillance continue des paramètres électriques, permettant d’anticiper les dysfonctionnements et d’optimiser l’exploitation du réseau. L’ensemble de ces fonctions concourt à un fonctionnement sûr, fiable et conforme aux exigences normatives en vigueur.
Conclusion
L’armoire industrielle de distribution électrique constitue un élément fondamental des infrastructures industrielles modernes. Par son rôle central dans la distribution, la protection et la commande de l’énergie électrique, elle garantit la sécurité des installations et la continuité des processus industriels. Sa conception et son fonctionnement reposent sur des principes techniques rigoureux et normalisés, faisant de l’armoire de distribution un système à la fois structurant et stratégique au sein des réseaux électriques industriels.
Voir aussi
Des articles sur l’avancement du réseau électrique du diorama
Cet article analyse la phase de parangonnage appliquée aux plateformes rotatives industrielles existantes. Les enseignements issus de cette étude comparative constituent une source d’inspiration pour la conception et la mise en scène du diorama de la Batcave dans le cadre du projet BATLab112.… Lire la suite →
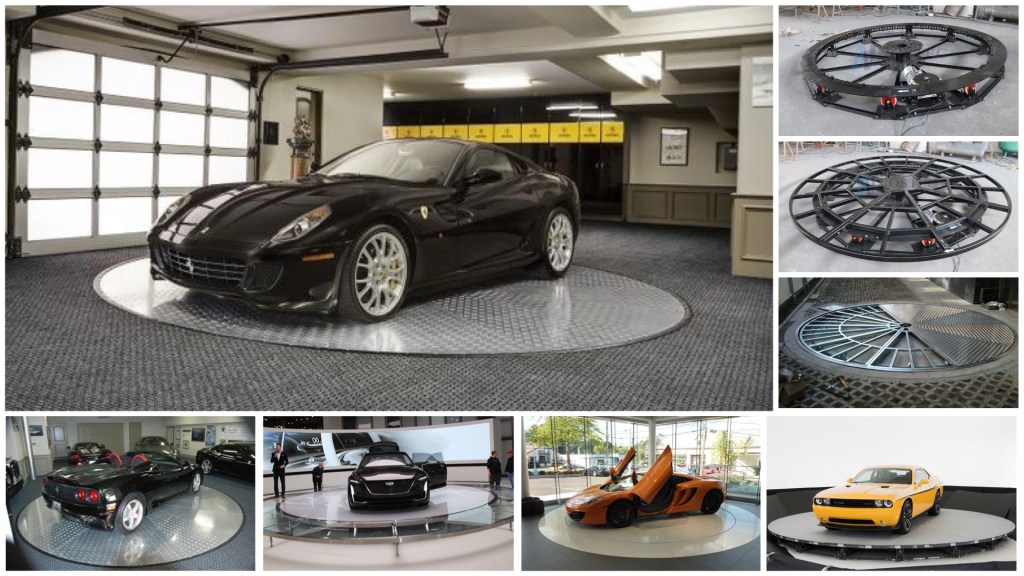
Principe de fonctionnement et finalités des plateformes rotatives pour véhicules
Une plateforme rotative pour véhicules est un dispositif mécanique destiné à permettre la rotation contrôlée d’un véhicule autour d’un axe vertical, généralement sur 180° ou 360°, sans nécessiter de manœuvres longitudinales. Elle est principalement employée dans des environnements contraints, tels que les parkings à espace réduit, les ateliers industriels, les musées automobiles ou les infrastructures logistiques.
Le fonctionnement repose sur une structure circulaire encastrée ou posée au sol, intégrant un plateau motorisé monté sur un système de roulements ou de galets. La rotation est assurée par un moteur électrique, couplé à un réducteur, garantissant un mouvement progressif, précis et sécurisé. Des dispositifs de contrôle, tels que des capteurs de position, des systèmes de verrouillage et des commandes automatisées ou manuelles, assurent la stabilité du véhicule et la sécurité des usagers pendant l’opération.
L’utilisation d’une plateforme rotative optimise la gestion de l’espace et améliore l’ergonomie des flux de circulation. Elle permet notamment le repositionnement rapide des véhicules, l’orientation précise pour des opérations de maintenance ou de présentation, ainsi que la réduction des risques liés aux manœuvres complexes. À ce titre, la plateforme rotative constitue une solution technique efficiente, conciliant contraintes spatiales, sécurité opérationnelle et performance fonctionnelle.
Revues des typologies de plateformes rotatives existantes
Quelques de détails de fabrication des plateformes rotatives
Voir la suite des articles sur l’étape de parangonnage de la gestion du projet BATLab112
Voir tous les articles de la gestion du projet BATLab112 sur la conception de la plateforme rotative équipant le diorama de la Batcave







































































{kind=link}