Blog
Console de commande – Conception préliminaire – Ep2

Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
Présentation générale
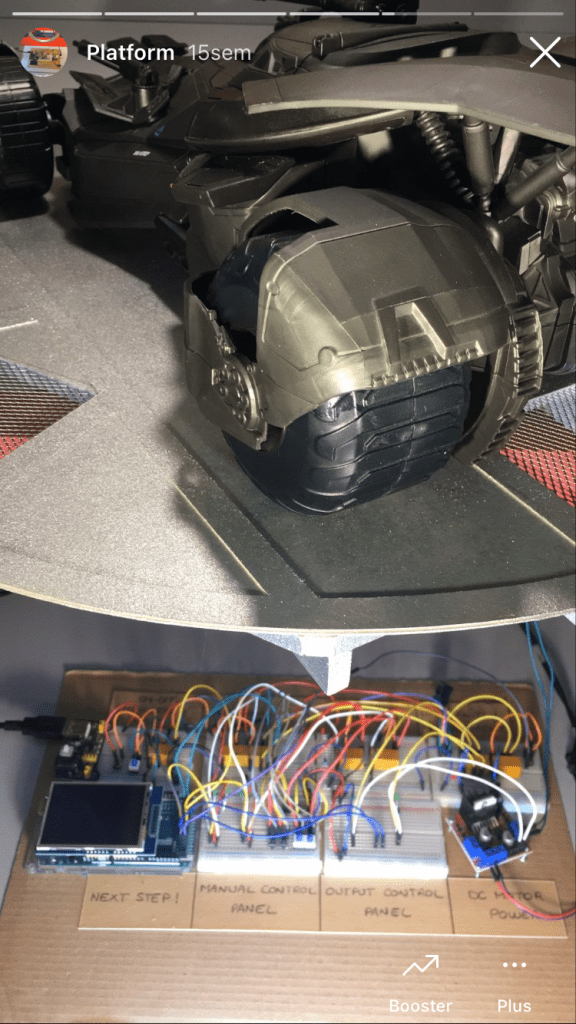
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.

Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
Cartes électroniques de puissance


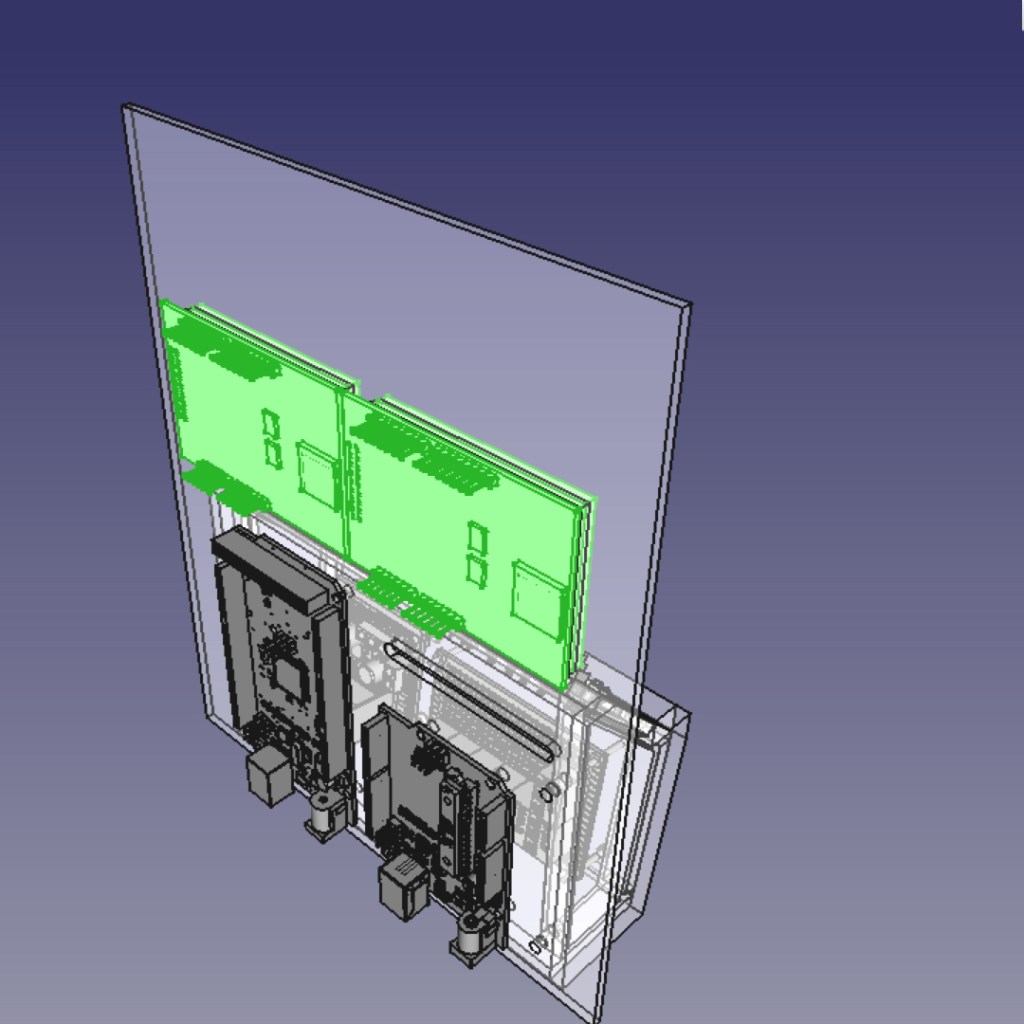
Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
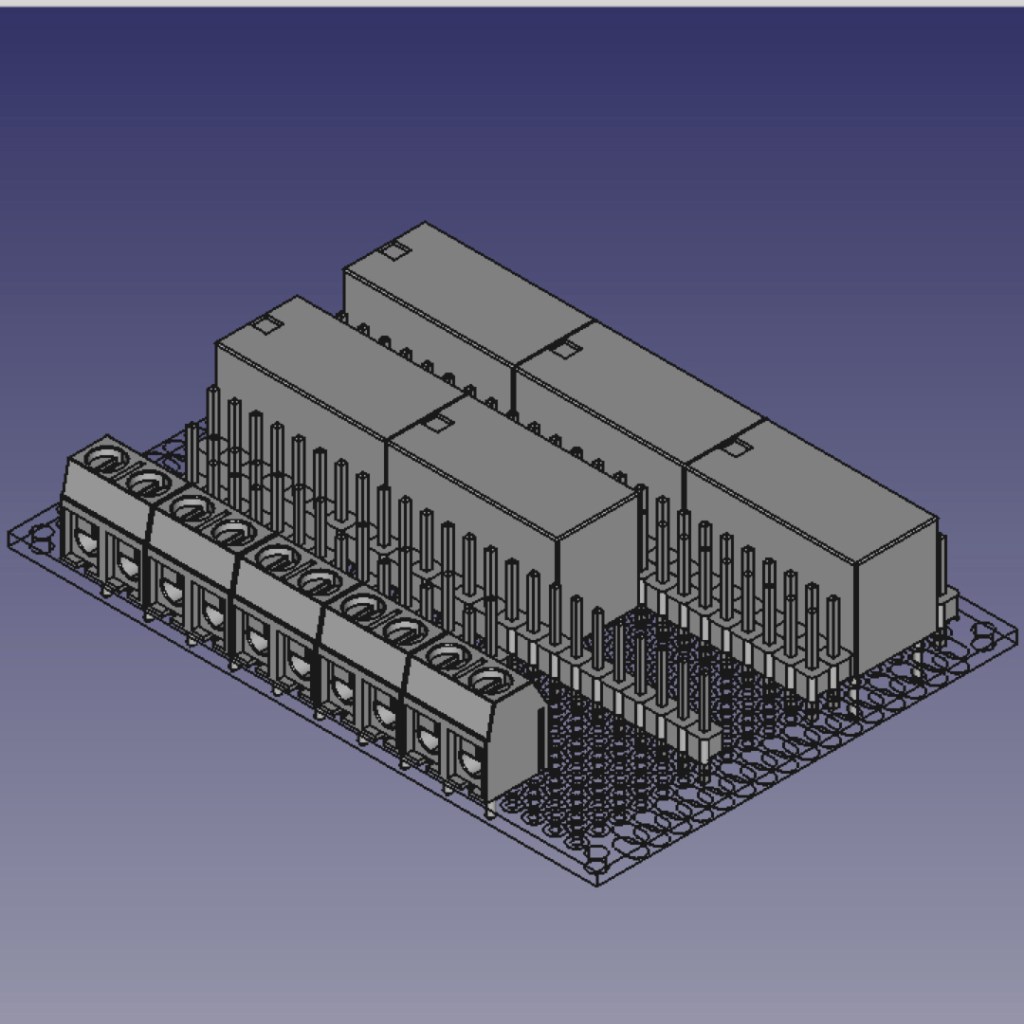
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
Cartes Arduino
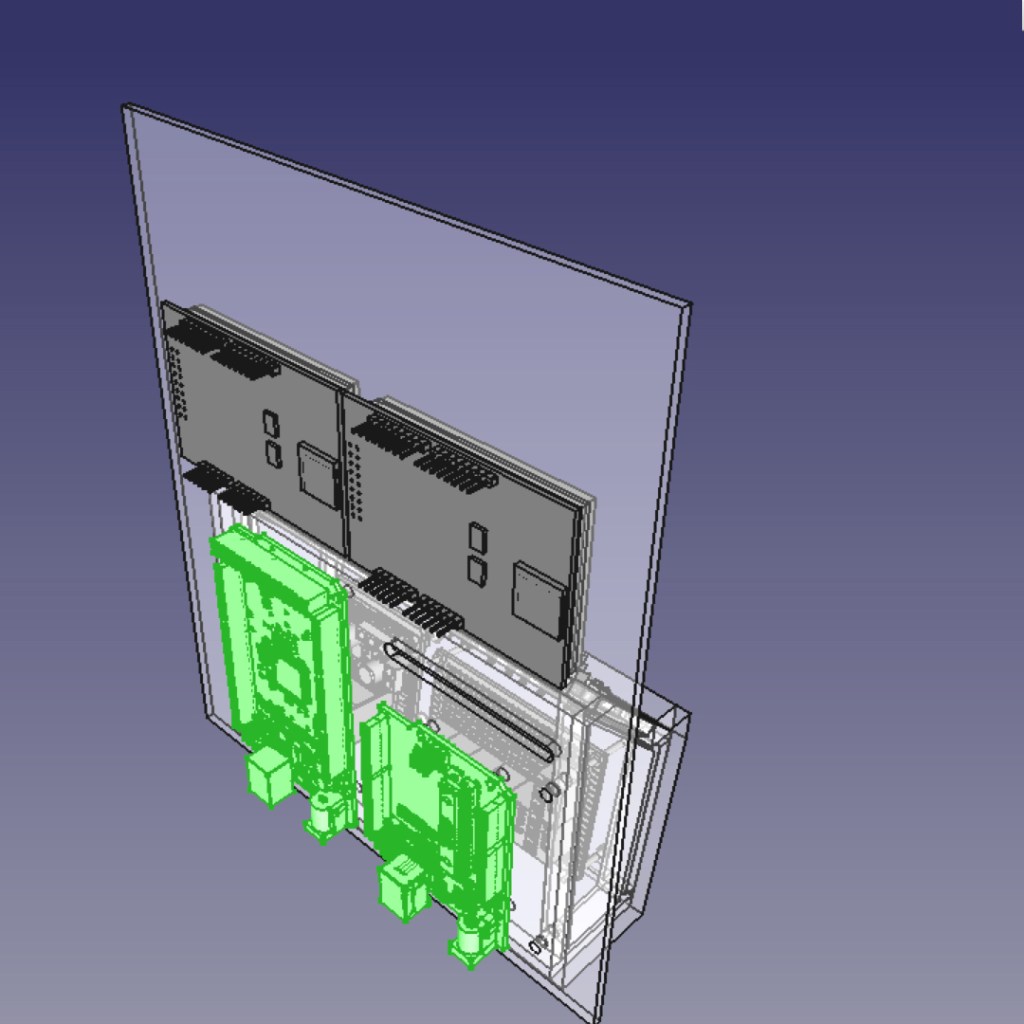


Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
Panneau des commandes



La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
Ecrans de contrôle


Modélisation 3D
FreeCAD

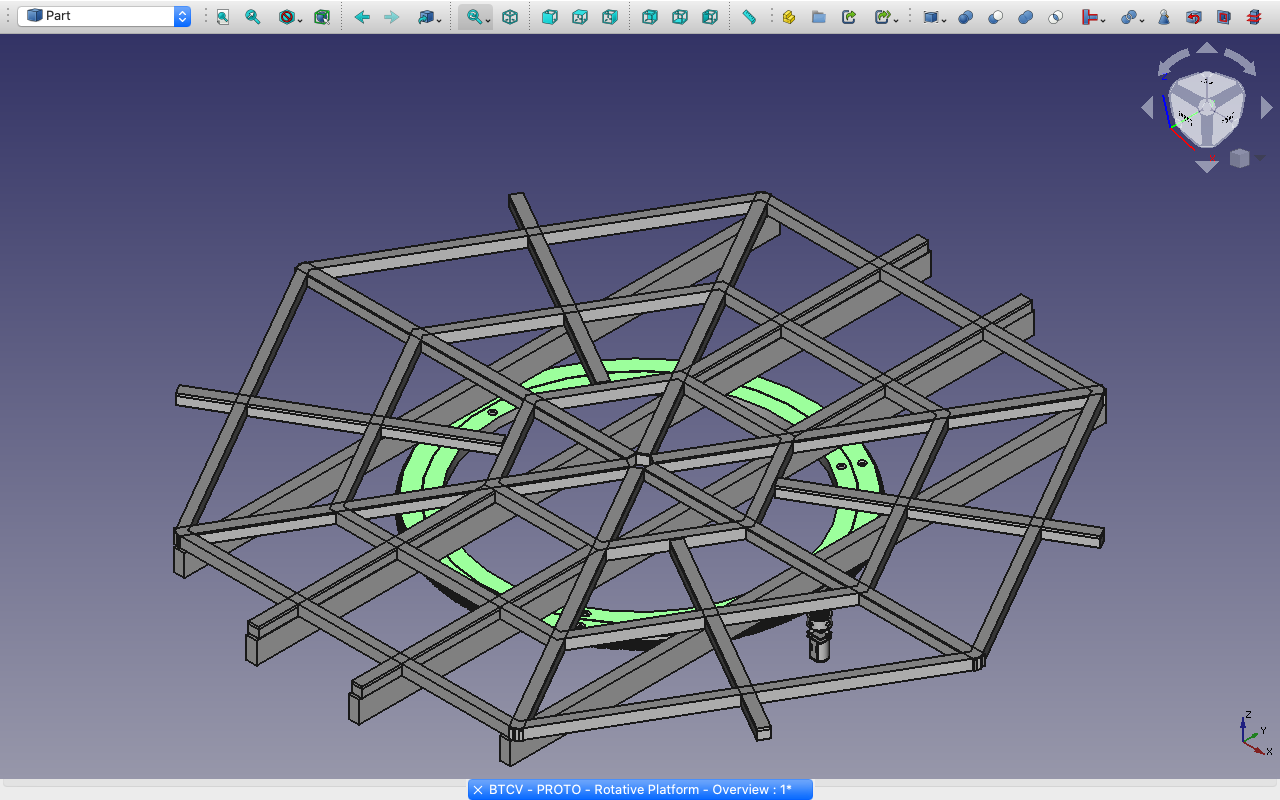
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
GrabCAD

Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Modeles 3D



Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.
Voir aussi
Articles – Conception préliminaire



Articles – Console de commande



Pont roulant bipoutre – Modèle 1

Résumé :
Cet article présente la réalisation du modèle opérationnel du pont roulant bipoutre du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
Introduction
La réalisation du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement.
Voir l’article …

Vues de détails



Depuis ce précédent article, la structure en bois est restée inchangée, mais des évolutions au design général ont été apportées.
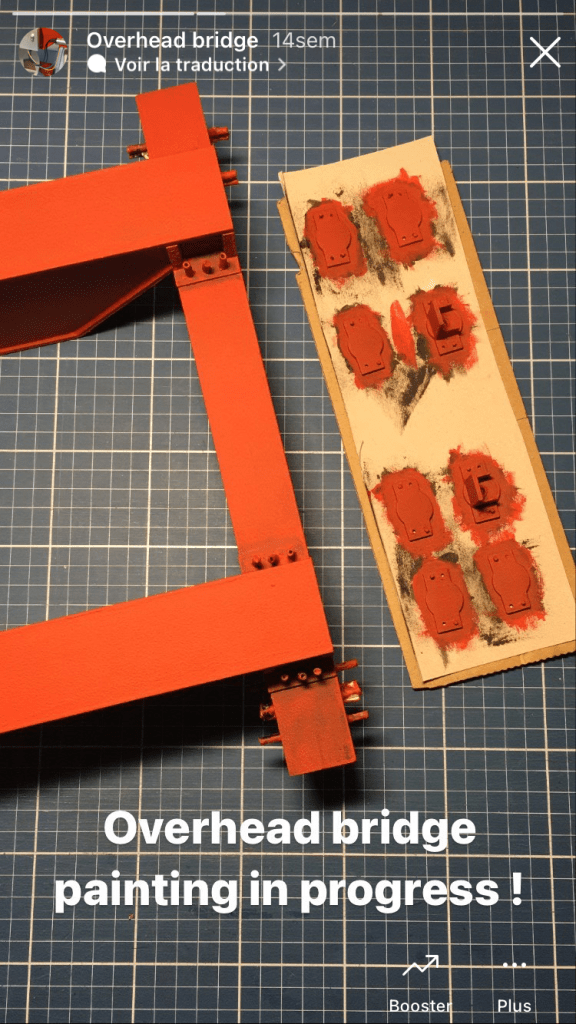
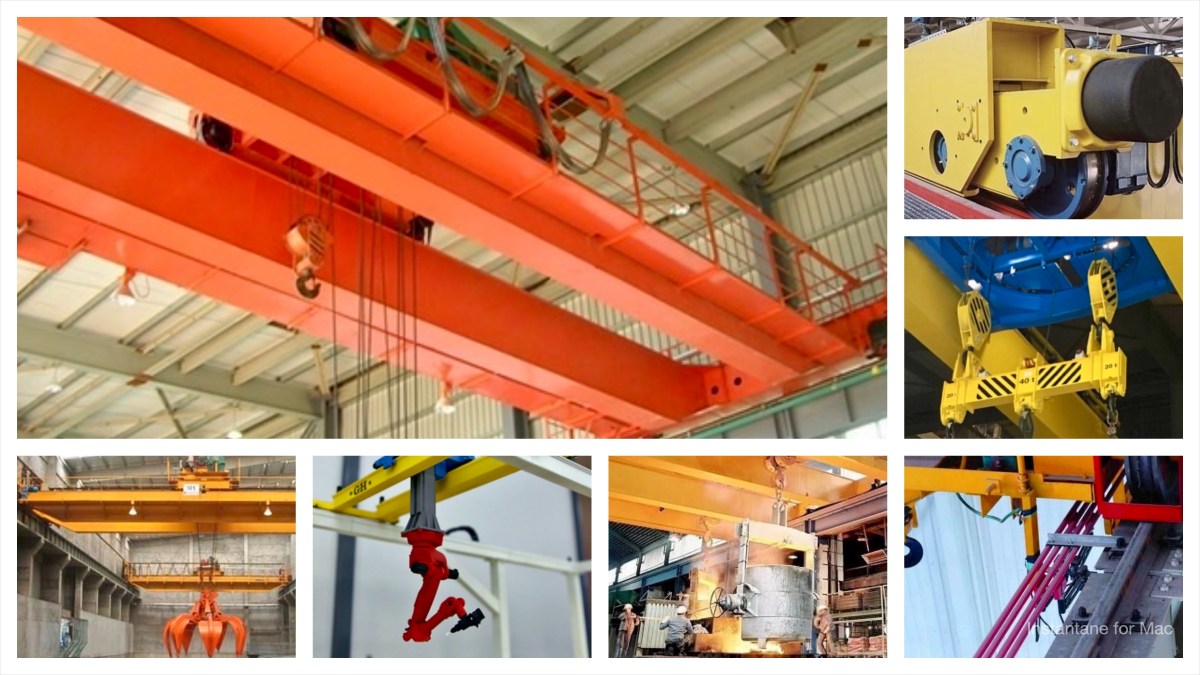
Tout d’abord, le pont roulant bipoutre est peint de couleur rouge « sécurité » (Photo n°1). Ce choix de couleur s’est fait à l’issue de la phase de parangonnage ayant montré que ces équipements industriels sont généralement peints soit en jaune, soit en rouge. Le choix de la couleur rouge est justifié par une approche « esthétique » du diorama.
Ensuite, les armoires de câblages des moteurs sont définitivement fixées sur une des poutres du pont roulant (Photos N°2 & 3). Ces armoires de câblage, autorise un raccordement électrique en toute sécurité, telles que l’on peut les trouver sur des équipements industriels.
Voir aussi
Articles – Pont roulant bipoutre



Console de commande – Electronique – Ep1

Cet article présente la conception électronique du prototype de commande de la console de commandes du diorama de la Batcave du projet BATLab112.
Introduction
La réalisation du diorama technique du projet BATLab112 requiert la mise en œuvre d’une infrastructure de commande fiable, didactique et cohérente avec les fonctions attendues du dispositif final. La console de commande, élément central de l’interface opérateur, constitue à ce titre un module critique. Elle assure l’articulation entre les commandes manuelles, les systèmes d’automatisation futurs et l’ensemble des actionneurs mécaniques, notamment le moteur de la plateforme rotative.
Après validation du concept mécanique de la console et de l’agencement des composants électroniques (écrans, boutons, commutateurs, microcontrôleurs), une première étape de prototypage électronique a été entreprise. L’objectif de cette phase est de vérifier la pertinence des choix techniques, d’évaluer l’ergonomie des modes de commande et de valider les comportements fonctionnels avant passage à une intégration définitive.
Le présent document propose une description détaillée de cette première version électronique, de son architecture générale aux essais menés sur maquette, en adoptant une démarche rigoureuse conforme aux standards de conception en électronique appliquée.
+ d’infos sur la conception préliminaire de la console de commande :
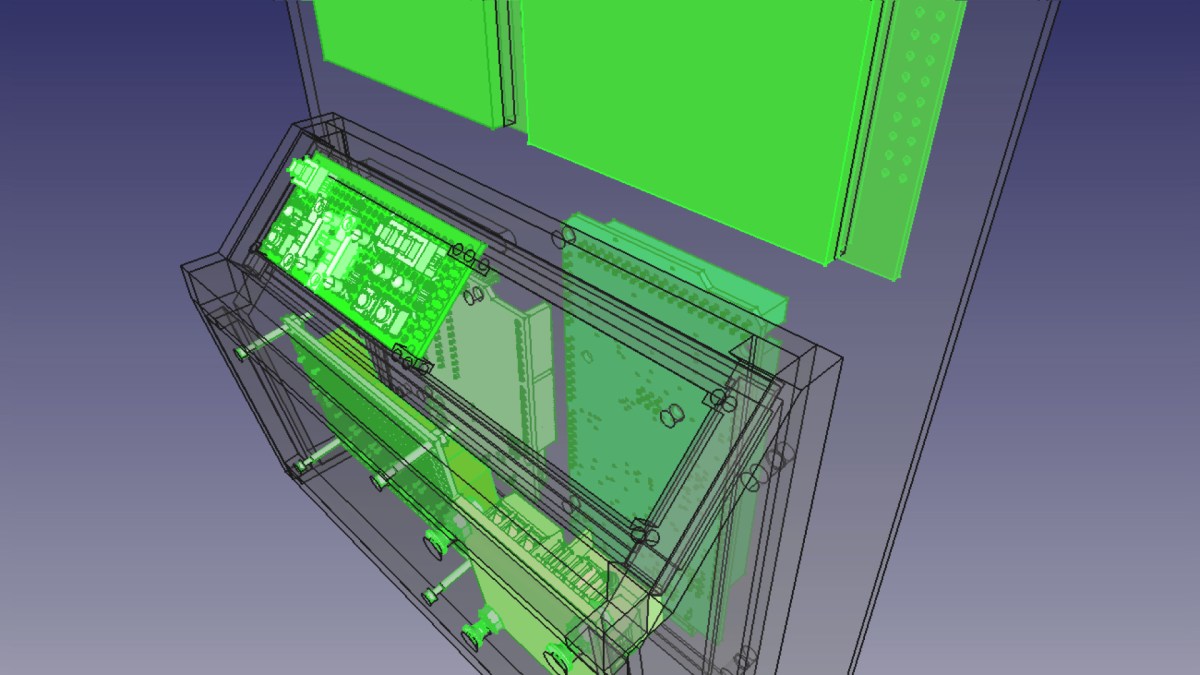
Schéma électronique
Architecture générale du système
La structure électronique de la console de commande repose sur un schéma de principe élaboré à l’aide du logiciel libre KiCad, choisi pour sa flexibilité, sa richesse fonctionnelle et sa compatibilité avec les environnements de prototypage rapide.
L’architecture est organisée en deux sous-systèmes principaux :
- Le module de gestion des commandes manuelles, intégrant les commandes de l’opérateur (boutons, commutateurs, voyants).
- Le module d’interface de puissance, assurant la mise en forme et la distribution des signaux vers le moteur à courant continu responsable de la rotation de la plateforme.
Cette séparation fonctionnelle répond à un impératif de lisibilité du schéma mais également à une logique de modularité favorisant les évolutions ultérieures.
KiCad

Ce schéma électronique est réalisé avec la suite logicielle KiCad distribuée librement.
Sous-système de gestion des commandes
La partie supérieure du schéma se divisent en 5 parties dédiées à la gestion des commandes. La partie inférieure du schéma est dédiée à l’interface entre les commandes et l’alimentation du moteur de rotation de la plateforme.
Mise sous tension – arrêt général
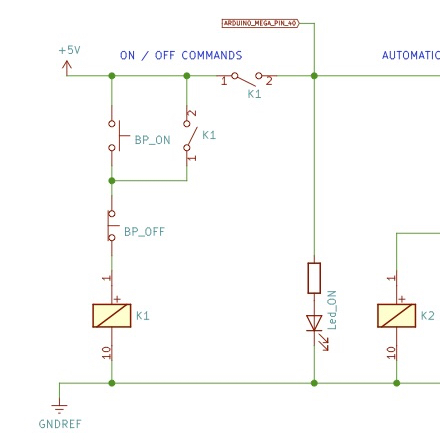
La mise sous tension générale est réalisée au moyen d’un relais à auto-maintien, solution fréquemment adoptée dans les environnements industriels.
Le principe consiste à maintenir l’alimentation du circuit tant que le relais reste excité, l’opérateur pouvant interrompre cette excitation via un bouton poussoir d’arrêt.
Cette architecture garantit la sécurité fonctionnelle du dispositif tout en simplifiant le comportement de remise en service.
Sélection du mode Auto / Manuel
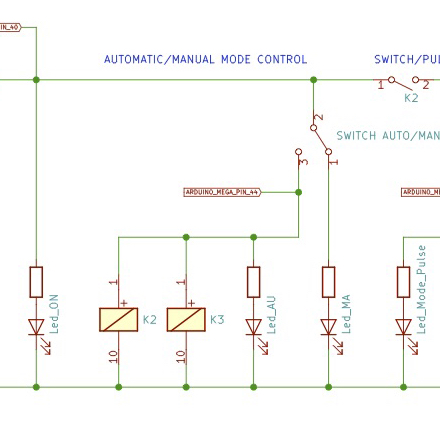
Un commutateur à deux positions permet de choisir entre un mode automatique et un mode manuel. Ce choix conditionne la provenance des signaux de commande :
- En mode manuel, les boutons opérateur commandent directement les relais gérant le sens de rotation.
- En mode automatique, ces mêmes relais sont pilotés par l’unité d’automatisation (qui sera intégrée dans une phase ultérieure du projet).
- BP_ON : Bouton poussoir de commande du relais K1
- K1 : Relais dont un contact est utilisé pour assurer son auto-maintien. Le deuxième contact est utilisé pour mettre sous tension tout le reste du montage.
- BP_OFF : Bouton poussoir de coupure de l’alimentation du relais K1.
- Led_ON : Led dont l’allumage dépend du deuxième contact du relais K1.
- SWITCH AUTO/MAN : Commutateur permettant d’alimenter soit les relais K2, K3 et la Led Led_AU, soit la Led Led_MA seule.
- K2 : Relais dont un des contacts autorise la mise sous tension de la suite du montage.
- K3 : Relais dont les contacts aiguilles vers l’interface de puissance du moteur, les commandes manuelles ou les commandes automatiques.
- Led_AU : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position AUTO.
- Led_MA : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position MAN.
Sélection du mode Switch / Pulse
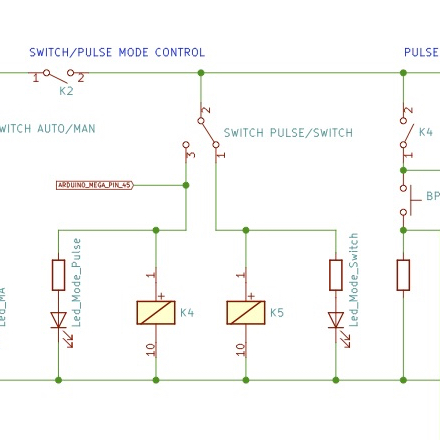
La sélection entre le mode switch et le mode pulse est assurée par un commutateur à 2 positions.
- SWITCH PULSE/SWITCH : Commutateur permettant d’alimenter soit K4 et Led_Pulse, soit K5 et Led_Switch.
- K4 : Relais dont un contact va autoriser les commandes manuelles en mode pulse.
- K5 : Relais dont un contact va autoriser les commandes manuelles en mode switch.
- Led_Pulse : Led dont l’allumage est commandé par le commutateur en position Pulse.
- Led_Switch : Led dont l’allumage est commandé par le commutateur en position Switch.
Switch & Pulse Commands
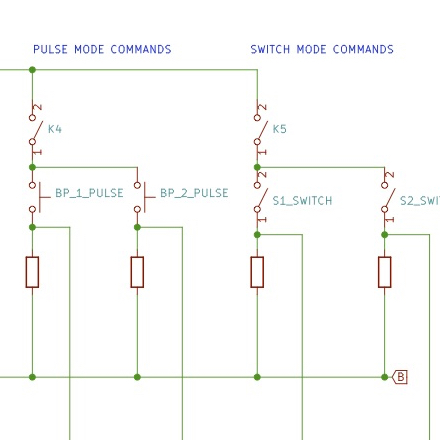
Les commandes manuelles en mode pulse sont assurées par des boutons poussoirs classiques. Il est nécessaire de maintenir l’appui sur le bouton poussoir maintenir la commande.
Les commandes manuelles en mode switch sont assurées par des boutons poussoirs à maintien de position. un premier appui bloque le bouton poussoir en position pour activer la commande. Un second appui, libère la position du bouton poussoir est arrête la commande.
- PB1_PULSE: Bouton poussoir de commande de la rotation du moteur dans un sens.
- PB2_PULSE : Bouton poussoir de commande de la rotation du moteur dans l’autre sens.
- PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans un sens.
- PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans l’autre sens.
Controller commands

Les contacts du relais K3 permettent d’aiguiller vers le moteur, soit les signaux des commandes manuelles soit ceux des commandes automatiques.
LED_R1 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
LED_R2 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
DC Motor controller
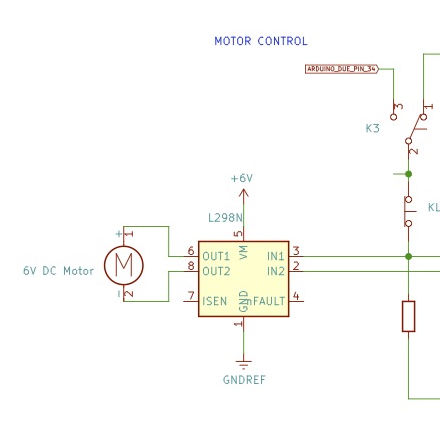
L’interface de puissance qui assure le pilotage du sens de rotation du moteur à partir des signaux de commandes numériques manuelles ou automatiques est une carte électronique basée sur un L298N.
Maquette

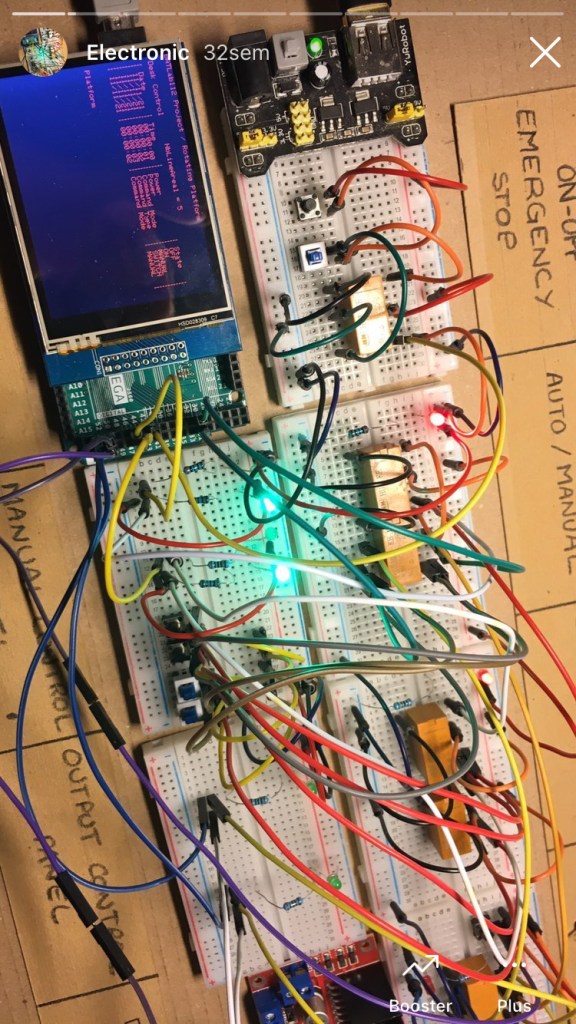

Afin de valider ces choix, une maquette physique du circuit a été réalisée. Le câblage sur plaque expérimentale (protoboard) a permis :
- de vérifier la cohérence des connexions ;
- de confirmer la compatibilité électrique entre les éléments ;
- d’effectuer une série de tests fonctionnels (mise sous tension, bascules de modes, commandes moteurs).
Cette démarche de prototypage intermédiaire est conforme aux bonnes pratiques de l’ingénierie électronique, permettant de déceler d’éventuelles incohérences avant la production d’un circuit imprimé ou l’intégration dans l’environnement mécanique définitif.
Test de fonctionnement



Cartes électroniques


Conclusion
Cette première itération électronique de la console de commande du diorama BATLab112 constitue une étape structurante du projet. Elle permet de valider l’ensemble des fonctions de base : gestion de la mise sous tension, sélection des différents modes de commande, pilotage du moteur de la plateforme rotative et évaluation de l’ergonomie opérateur.
L’architecture modulaire mise en place offre une marge significative pour les développements ultérieurs, notamment :
- l’intégration d’un système de contrôle automatisé basé sur Arduino ou équivalent,
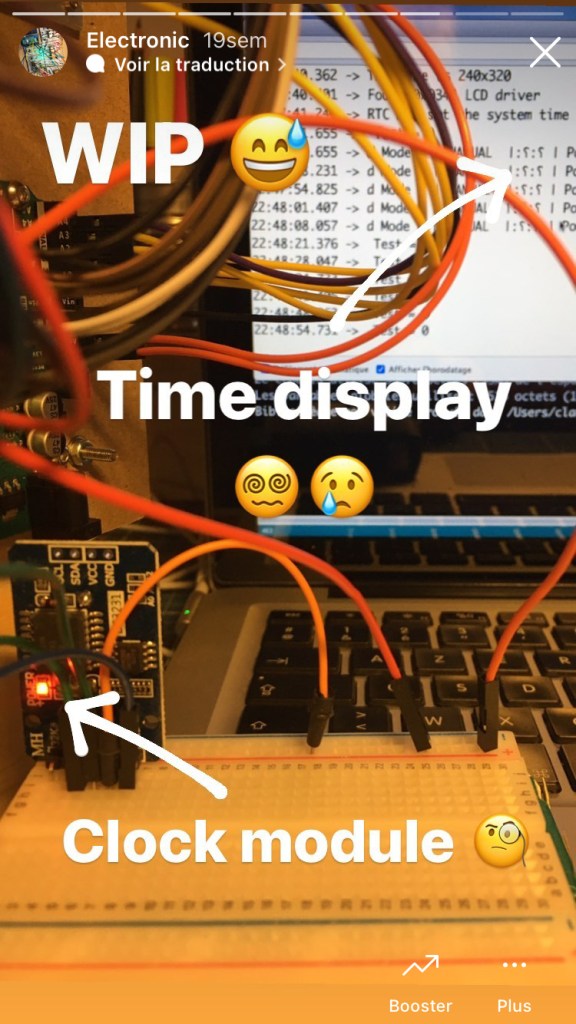
- la mise en place d’un affichage en temps réel via un écran TFT 2,8’’,
- la migration vers un câblage définitif en adéquation avec les contraintes mécaniques du diorama.
En ce sens, ce prototype représente un jalon essentiel dans la transition entre la conception préliminaire et la validation fonctionnelle du dispositif final, illustrant une démarche académique structurée et reproductible.
Voir aussi
Articles – Console de la commande
Articles – Conception des équipements industriels

Articles – Timeline du diorama



Pont roulant bipoutre – Prototype

Résumé :
Cet article présente la réalisation du prototype du pont roulant bipoutre du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
Introduction
La réalisation du prototype du pont roulant bipoutre du diorama de la Batcave fait suite à la conception préliminaire de cet équipement.
Voir l’article …
Présentation générale

La structure du pont roulant est fabriquée en bois pour des raisons de facilité d’usinage, essentielle lors de cette phase de prototypage, et de maîtrise de l’impact environnementale du projet. Compte tenu des dimensions de certaines pièces constituant cet équipement, il n’était de toute façon pas envisageable de les imprimer avec une imprimante grand public. La perspective d’une fabrication en résine ou par impression professionnelle n’était pas non plus compatible avec le budget prévisionnel du projet.
Les pièces d’assemblage sont imprimées pour des raisons de faisabilité technique et de précision de fabrication. Les principaux sous-ensembles du pont roulant bipoutre sont assemblés par boulonnage (M2).
Les photos utilisées dans cet article ont été prises avant la phase de ponçage et de finition !
Vues de détails
Pièces en bois

Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite fabriquées par le 8FABLAB à Crest dans la Drôme.
Pièces d’assemblages
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite imprimées par Benoit, membre de la communauté du projet BATLab112.
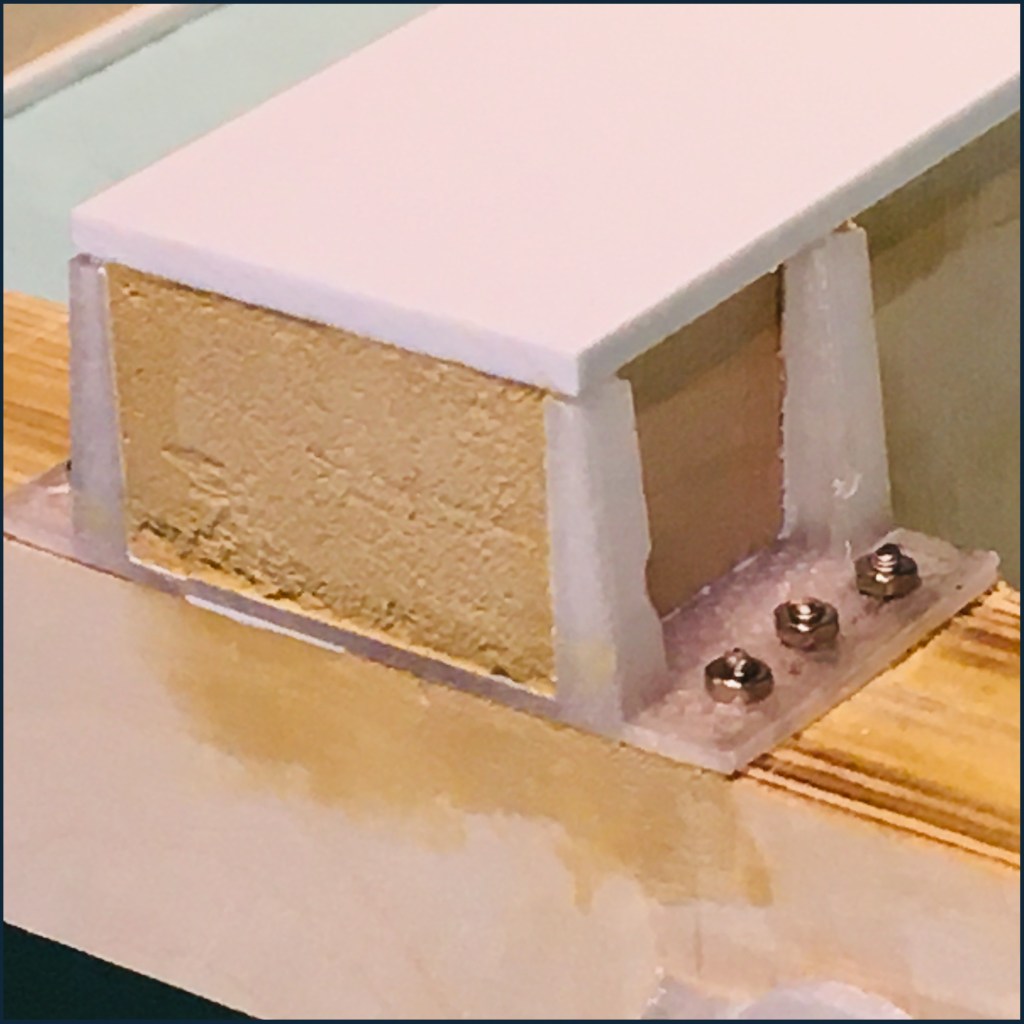
Platine d’assemblage poutre et sommier du pont roulant.
Deux platines d’assemblage sont collées à chaque extrémité des poutres. Ces trois pièces constituent un sous-ensemble. La platine permet le montage et démontage de ce sous-ensemble sur les sommiers du pont roulant par boulonnage.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un montage le plus ajusté possible.
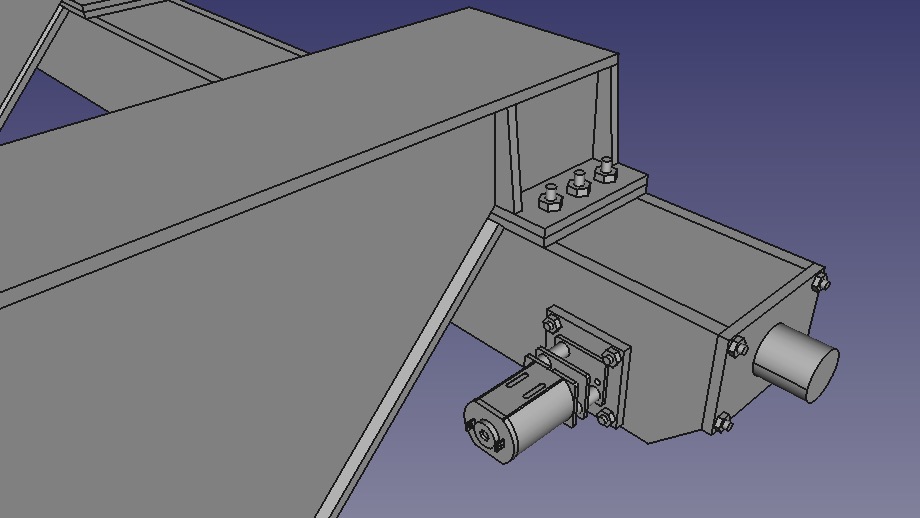
Support de fixation des micros moteurs
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Sa forme permet de maintenir un micro moteur 6VDC. Un système de fixation supplémentaire reste à l’étude pour le moteur.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un maintien du moteur.

Plaque de protection
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Aucune contrainte particulière n’est requise pour la réalisation de cette pièce, destinée à protéger et maintenir en place l’axe de la roue libre.

Test fonctionnel
Validation du design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire

Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite aux contraintes d’assemblage rencontrées .
Prototype n°1

La fabrication des pièces principales en bois est satisfaisante même si leur poids reste important. Les différents éléments constituant les poutres du pont roulant ont été assemblés par collage. L’ensemble est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Validation du design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire

Le point fonctionnel critique sur ce prototype est la liaison pivot des axes de rotation des roues. Il est impératifs que ces liaisons soit la plus fluide possible pour autoriser l’utilisation de micro moteur. Le poids non négligeable de la structure en bois étant déjà un handicap il est impératif de contrôler cette fonction.
Prototype n°1

L’essieu d’entrainement est réaliser à partir d’un axe en aluminium, des roulements à billes de guidage et une poulie à gorge en V pour la roue. L’essieu de roue libre est réalisé à partir d’un axe et d’une poulie à gorge en V.
Validation de la résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids des deux bras robotiques ainsi que du Trolley sur lequel ils sont fixés. Cependant, les bras robotiques étant en cours de fabrication ce test n’a pu être réalisé.
Toutefois ce test a mis en évidence la trop grande souplesse de la structure supportant les rails de guidage du pont roulant.
Test de la motorisation du système
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
Le couplage de l’axe des roues motrices avec les moteurs est assuré par un assemblage « en force » entre l’axe du moteur et l’axe de la roue.
La prochaine version de cette transmission devra assurer un couplage entre l’axe du moteur et celui de la roue plus durable.
Moteur
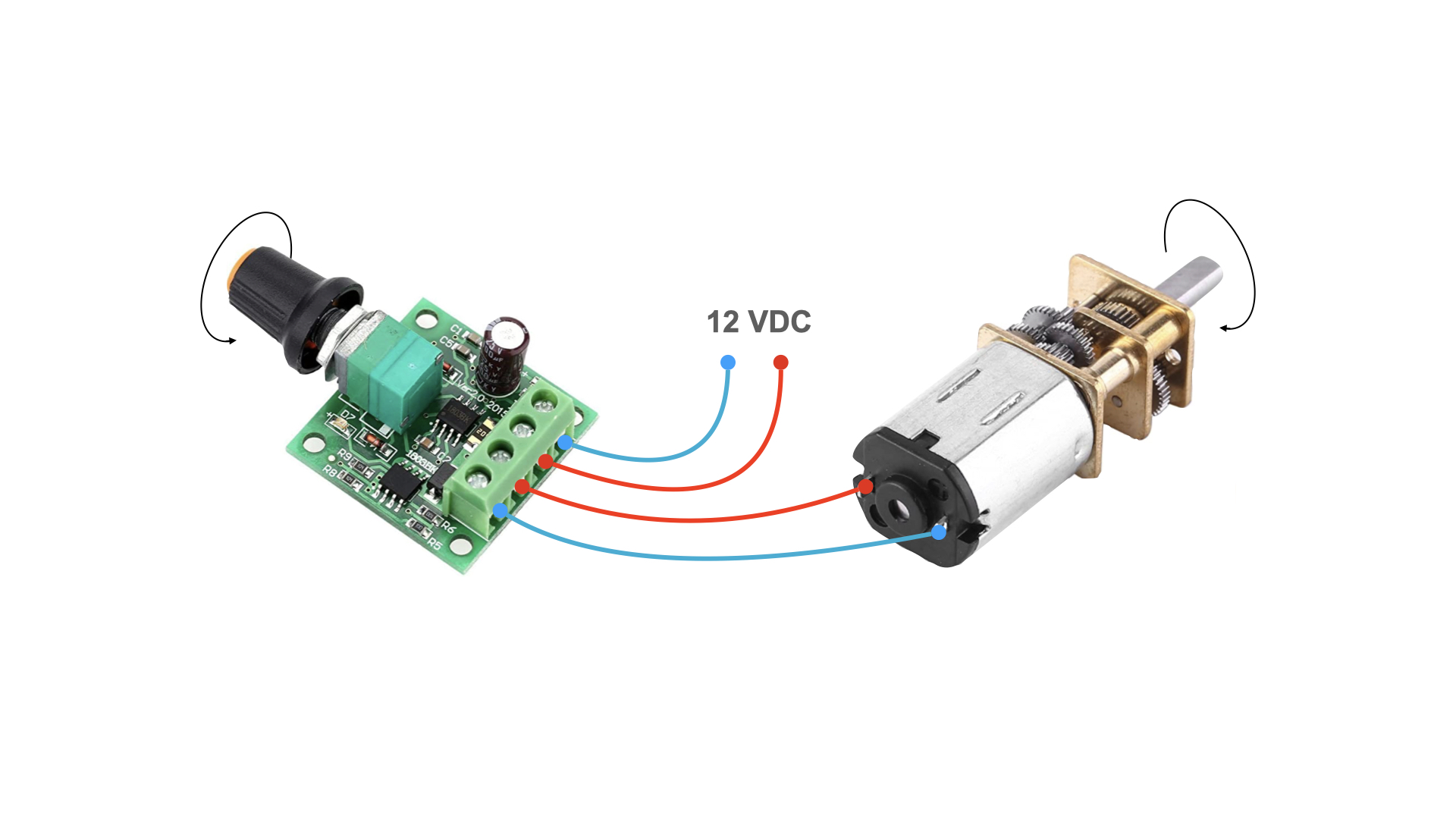
Ce test de motorisation a été réalisé avec deux micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler de manière identiques les tensions d’alimentation des moteurs et ainsi ajuster leurs vitesses de rotation à des valeurs identiques. Le couple de ces moteurs est suffisant pour entrainer l’ensemble ; pont roulant + charge. Le test de motorisation est donc validé.
Conclusion
Même si ces premiers tests ont été réalisés dans des conditions non optimales, ce premier prototype du pont roulant bipoutre équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Il est raisonnable de penser que le fonctionnement de cet équipement sera amélioré sur une structure complète et plus aboutie.
Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
Voir aussi
Articles – Pont roulant bipoutre
Articles – Prototype



Pont élévateur – Prototype – Ep1

Architecture du diorama – Conception préliminaire

Résumé :
Cet article présente la conception préliminaire de la structure du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
Introduction
La conception préliminaire de la structure du diorama de la Batcave fait suite à la modélisation de l’intégration des systèmes industriels présents dans le diorama.
Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges.
Voir l’article …

Vue générale

Vues de détails

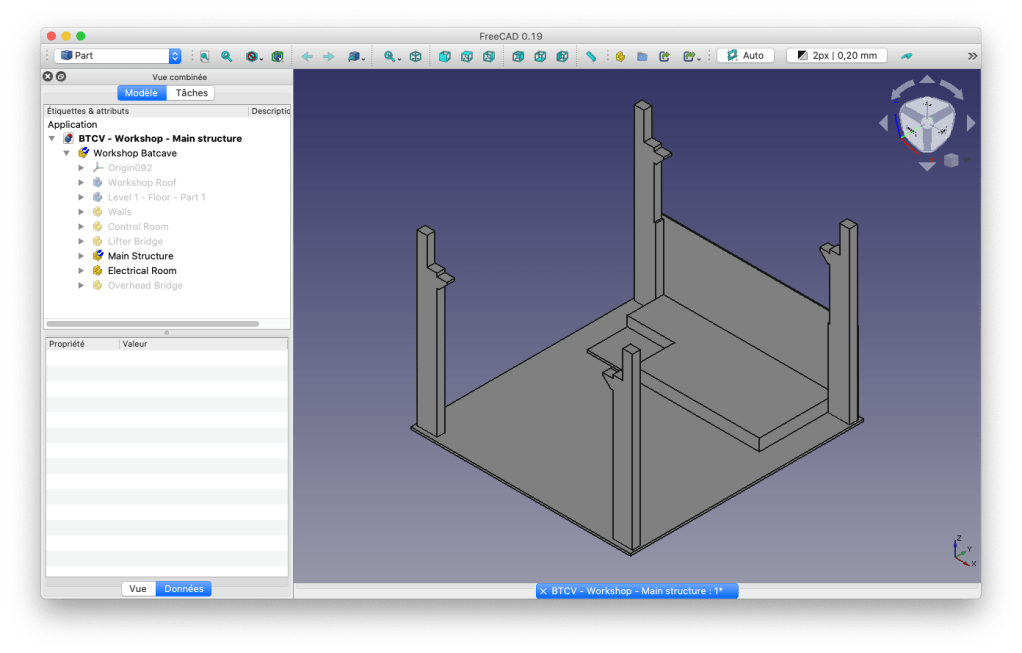
Screenshot 001 – La structure principale est composée d’un plateau sur lequel viennent se fixer les quatre piliers principaux à chaque angle. Ce plateau correspond au niveau 0, celui le plus bas du diorama. Le design des piliers est conçu pour soutenir le plateau du niveau 0, correspondant au niveau d’entrée de la Batmobile dans la Batcave, les chemins de roulements du pont roulant bipoutre, ainsi que le plateau de niveau 0.
Screenshot 002 – Le module du local électrique se glisse entre les piliers du fond du diorama, sur le plateau du niveau 0. Ce module se décompose en deux parties : Une plateforme surélevée et un panneau vertical correspondant au mur de fond.

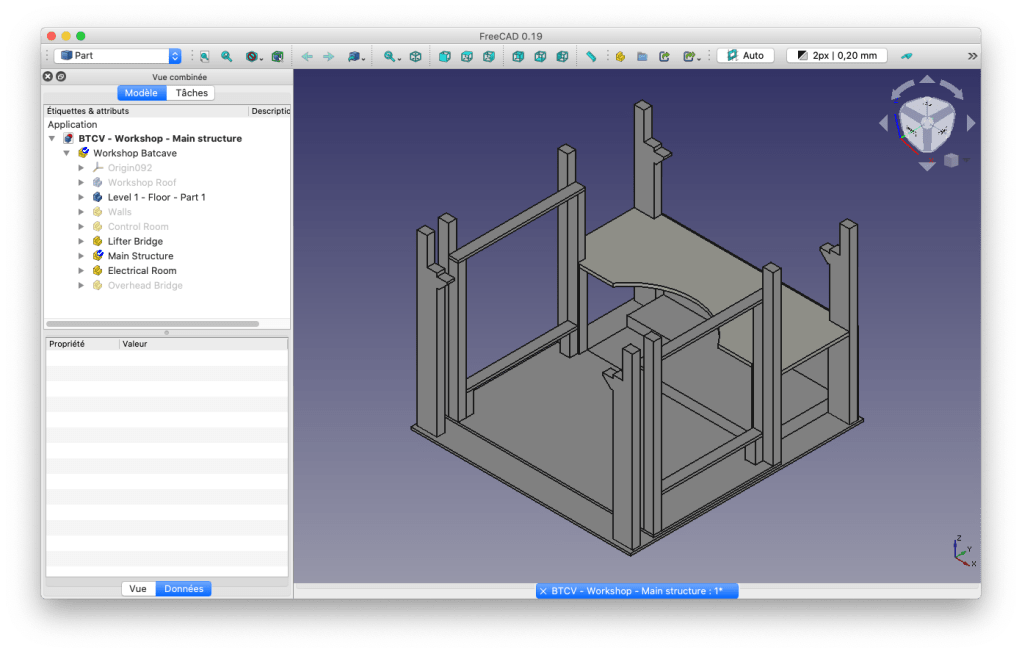
Screenshot 003 – Le module du pont élévateur est posé sur le plateau du niveau 0. Ce module se décompose en un plateau et quatre piliers, ainsi que des renforts pour supporter les quatre axes verticaux du pont élévateur. Ce module est lui aussi conçu pour être démontable, même si sa taille doit permettre de le manipuler d’une seule pièce.
Screenshot 004 – Le demi plateau du niveau 0, correspondant au niveau de l’atelier automatisé de la Batcave, est posé sur la partie basse des deux piliers principaux ainsi que les deux piliers du module du pont élévateur. Le design de ce plateau est conçu pour intégrer l’arrondi de la plateforme rotative au plus prêt, afin de permettre l’accès piéton à la plateforme.


Screenshot 005 – Le plateau du niveau 0 est posé sur les quatre piliers principaux de la structure.
Screenshot 006 – Le mur du fond est composé des panneaux verticaux du local technique et de la zone de contrôle. Les trois autres murs sont non définis jusque là ; les deux murs latéraux du diorama ainsi que le mur en face avant. Comme ces murs n’ont qu’un rôle esthétique, leurs designs n’est pas étudiés dans cette phase de conception préliminaire dont l’objectif consiste à focaliser sur les aspects fonctionnels du diorama.
Modélisation 3D
FreeCAD
La modélisation de la structure de l’atelier de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Python


L’animation 3D de présentation de la structure de l’atelier de la Batcave du projet BATLab112 a été réalisé par macros en langage Python sous FreeCad V0.19
Voir aussi
Articles – Architecture



Articles – Conception préliminaire


Plateforme rotative – Prototype

Résumé :
Cet article présente la réalisation du prototype de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
Introduction
La réalisation du prototype de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement.
Voir l’article …
Présentation générale

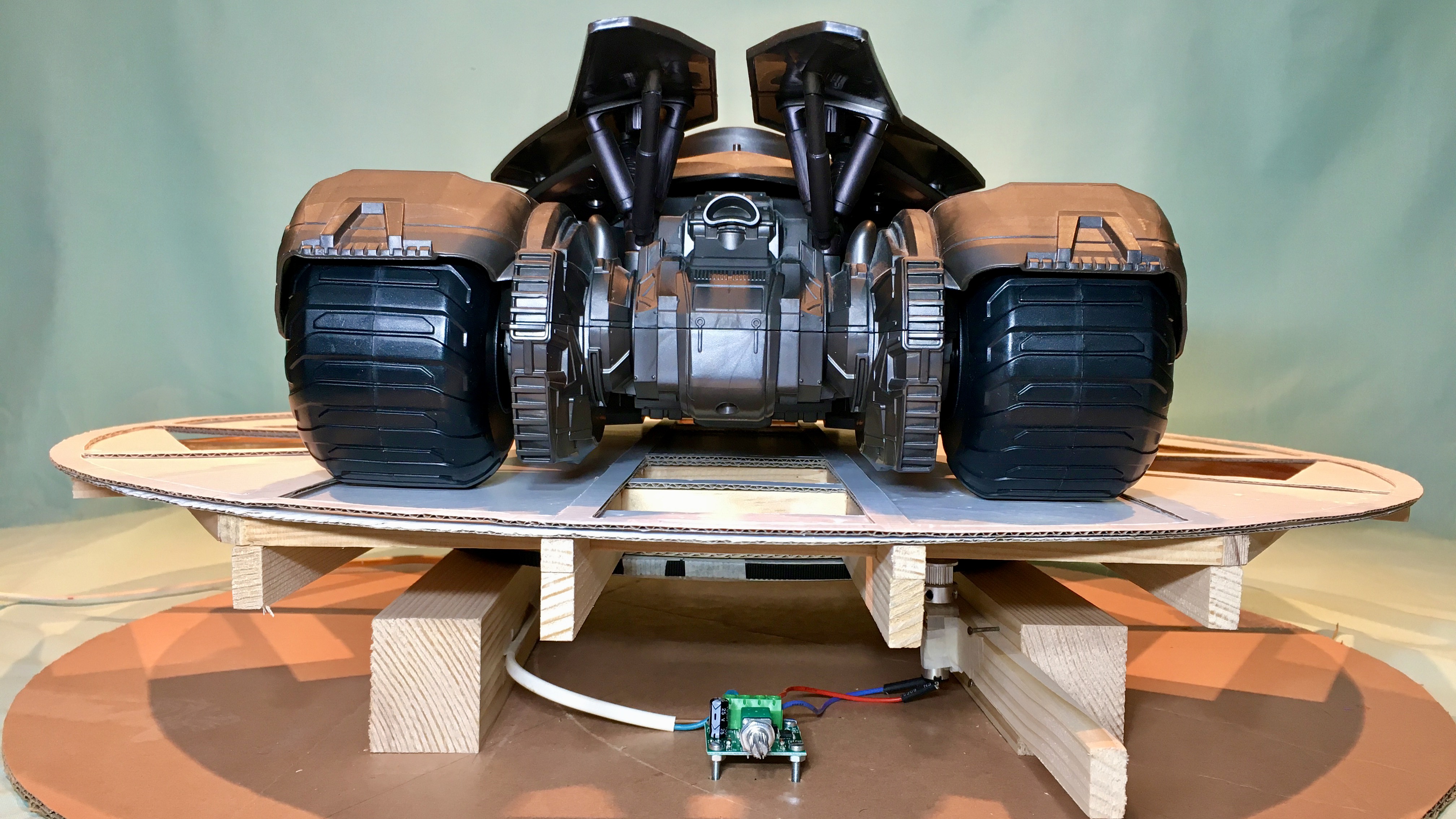
La structure de la plateforme a été fabriquée en bois pour des raisons économiques mais aussi de facilité et rapidité de mise en oeuvre, le montage ayant pu être réalisé par simple collage. La plaque de couverture a été fabriquée en carton. La liaison pivot est assurée par un roulement à bille de type Lazy Susan, généralement utilisé pour des plateaux tournant de table.
La réalisation de ce premier prototype de la plateforme rotative de la Batcave du projet BATLab112 poursuit plusieurs objectifs. Il s’agit dans un premier temps de valider le design issu de la conception préliminaire et dans un deuxième temps de tester la motorisation de ce système.
- Valider le design technique
- Valider le design fonctionnel
- Valider le design mécanique
- Tester la motorisation du système
Vues de détails
Design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire

Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite à des différences de côtes rencontrées lors de la réception de pièces manufacturées.
Prototype n°1

Les différents éléments ont été assemblés par collage. La fabrication de la structure en bois est plutôt satisfaisante. Même si les imperfections des pièces de bois utilisées ne permettent pas une précision au millimètre, cette structure présente une surface d’appui pour le plateau suffisamment plane. Elle est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Pour améliorer la précision de fabrication, une solution consisterait à rectifier toutes les pièces de bois avant assemblage ou d’opter pour des profilés aluminium.
Design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le poids total, de la plateforme et du modèle réduit de la Batmobile, doit être le plus faible possible, pour autoriser l’utilisation d’un micro-moteur pour la rotation, afin d’être conforme avec les exigences d’échelle 1/12 du projet. Il s’agit donc ici de contrôler particulièrement si l’utilisation de matériaux légers est compatible avec l’assemblage du roulement à bille plus lourd.
Prototype n°1

L’assemblage de la structure en bois sur le roulement à billes de type Lazy Susan est réalisé grâce à 1 cercle de carton. Ce cercle est collé sur la structure. Les pions (en blancs sur la photo) fixent l’ensemble sur le roulement à billes. Cet assemblage est satisfaisant pour solidariser la structure en bois avec la couronne extérieure du roulement à billes. Il autorise la rotation de l’ensemble par rapport à la couronne intérieure. Le design fonctionnel est donc validé.
Une amélioration consisterait à réaliser le cercle d’assemblage entre la structure en bois et le roulement à billes dans un matériau plus rigide que du simple carton d’emballage ce qui éviterait les éventuelles déformations.
Résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids du modèle réduit de la Batmobile.
Conception préliminaire

Le plateau de la plateforme doit être d’une épaisseur très mince (inférieure à 2mm), pour des raisons de cohérence avec l’échelle 1/12 du projet. Il est nécessaire de s’assurer d’une part que sa réalisation puisse se faire dans un matériau suffisamment léger (ici du carton) pour ne pas rendre l’ensemble trop lourd pour la capacité des moteurs du pont élévateur et de la plateforme. D’autre part, il est aussi nécessaire de s’assurer que ce plateau ne se déforme pas sous le poids du modèle réduit de la Batmobile.
Prototype n°1
Le plateau de la structure est découpé dans une plaque de carton d’emballage d’épaisseur 1mm. Dans un premier temps, ce plateau est simplement posé sur la structure en bois. L’ensemble structure et plateau supporte tout à fait le poids du modèle réduit de la Batmobile. Le plateau ne se déforme pas sous le poids de la Batmobile. L’architecture de la structure de la plateforme associé à un plateau de faible épaisseur est donc validée.
Une amélioration consisterait à réaliser le plateau par découpe laser pour obtenir une découpe plus précise.
Motorisation
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
L’engrenage de transmission est réalisé avec une poulie montée sur l’axe du moteur et une courroie GT2 5mm entourée autour du diamètre extérieur du roulement à billes. La courroie n’a pas été collée mais juste maintenue par du ruban adhésif. Le moteur est lui aussi simplement maintenu par du ruban adhésif contre un des supports provisoires de la plateforme. Le test est concluant malgré un montage sommaire. Cependant, ce montage ne permet pas de réaliser une rotation complète de la plateforme à cause de la présence du ruban adhésif.
La prochaine version de cette transmission devra intégrer le collage définitif de la courroie ainsi qu’une fixation plus appropriée du moteur.
Moteur
Ce test de motorisation a été réalisé avec un micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler la tension d’alimentation du moteur et ainsi ajuster la vitesse de rotation de la plateforme. Le couple du moteur associé au rapport de réduction de l’engrenage suffit pour entrainer l’ensemble ; plateforme et modèle réduit de la Batmobile. Le test de motorisation est donc validé.
Validation fonctionnelle
Conclusion
Ce premier prototype de la plateforme rotative de la Batmobile équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
Voir aussi
Articles – Plateforme rotative



Le modèle numérique de la Batmobile du diorama de la Batcave du projet BATLab112
Cet article présente le modèle à l’échelle 1/12 de la Batmobile utilisé comme prototype pour réaliser le diorama pédagogique du projet BATLab112.… Lire la suite →
Première publication :
Dernière mise à jour :
Temps de ecture :
3–5 minutes
Mots clés :
Cet article contient des références à des marques commerciales. Ceci n’est en aucun cas un placement de produit ou de la publicité. Ces produits sont cités au titre de la référence qu’ils représentent dans la recherche de solutions techniques dans le contexte du projet BATLab112.
Introduction
Dans les articles précédents, le type de la Batmobile du projet BATLab112 et le modèle miniature qui sera utilisé dans le diorama de la Batcave ont été définis. Ce choix s’est porté sur la Batmobile des films de Zack Snyder ; Batman V Superman de 2016 et Justice League de 2021. Le modèle miniature à l’échelle 1/12 est produit par Mattel : DC Comics™ Justice League Multiverse Batmobile.
Pour + d’infos, voir les articles :

Disposer du modèle numérique de la Batmobile, permet tout d’abord une meilleure visualisation des proportions lors de la phase de conception de l’atelier et des systèmes automatisés. Mais ce modèle permet surtout de garantir une conception du design de chaque équipement, conforme aux dimensions de la Batmobile et ainsi de garantir les libertés de mouvements nécessaires pour ces équipements.
Modèle numérique de la Batmobile



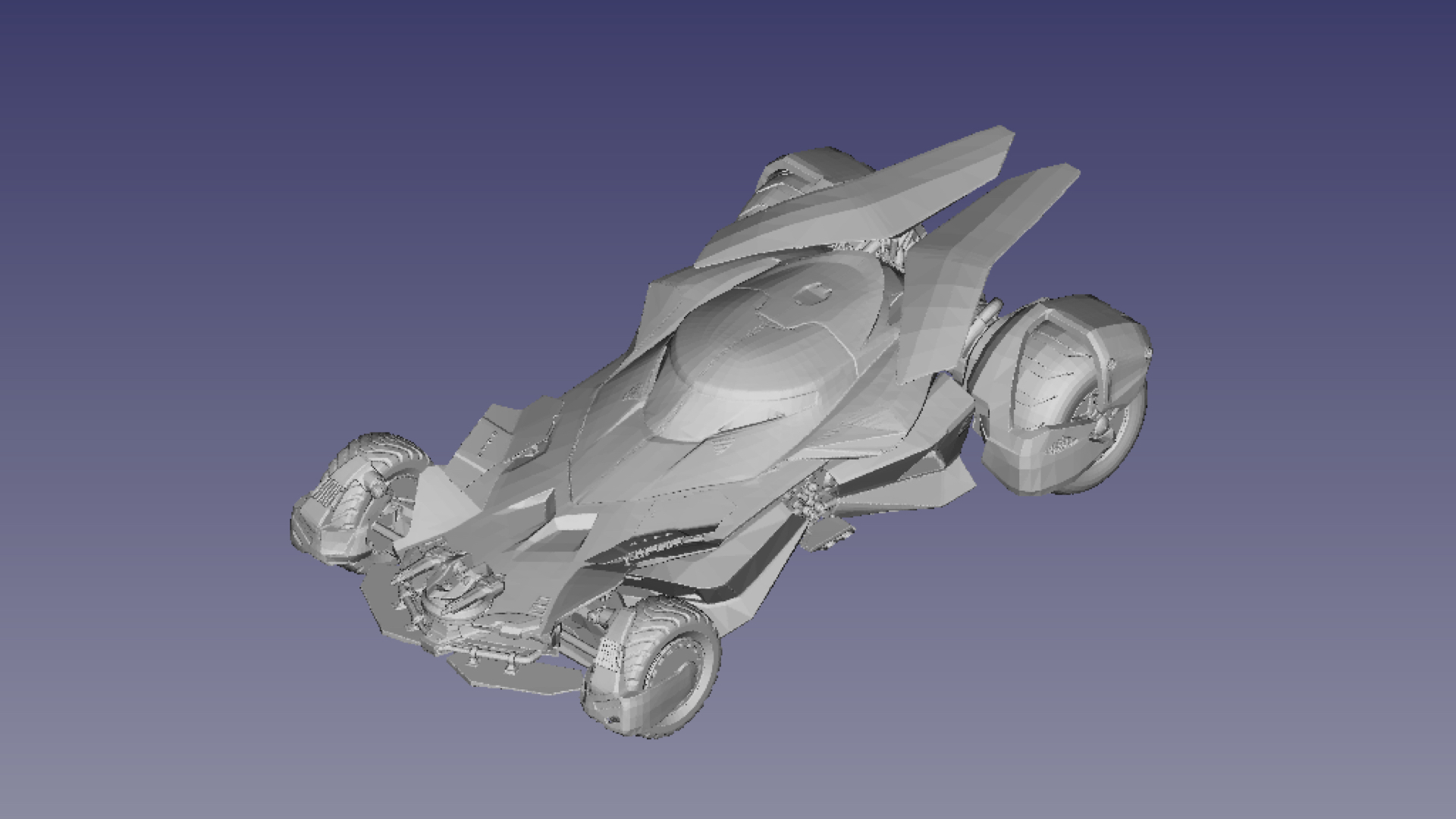
Pour des raisons d’efficacité et de rendu final, le modèle numérique de la Batmobile n’a pas été crée par le projet BATLab112, même si cette opération représentait un exercice intéressant. Obtenir un résultat esthétiquement satisfaisant aurait était très chronophage, préjudiciable à l’avancé du projet. De nombreux modèles de cette Batmobile sont présents sur internet. Cependant, même pour les modèles payants, la très grande majorité d’entre eux présentent plusieurs défauts.
- Certains fichiers sont corrompus ou le modèle est inutilisable.
- Le rendu esthétique n’est pas très satisfaisant car souvent le modèle est trop peu détaillé.
- Les proportions du modèles ne sont pas conformes à une représentation à l’échelle.
- Le format des fichiers proposés au téléchargement ne sont pas compatibles avec le format des fichiers du logiciel FreeCAD, utilisé pour concevoir le design du diorama du projet BATLab112.
Le modèle sélectionné pour servir de référence au projet BATLab112 est obtenu à partir de la plateforme de partage collaborative GrabCAD.
- Le rendu esthétique est très satisfaisant
- Les proportions du modèle sont conformes avec une représentation à l’échelle
- Le format du fichier de ce modèle numérique est compatible avec le logiciel FreeCAD, utilisé pour concevoir le design du diorama du projet BATLab112.
La modélisation numérique du diorama pédagogique de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du diorama pédagogique de la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Dimensions à l’échelle 1/12 du modèle numérique
Batmobile réelle
Modèle miniature
Modèle numérique


| Longueur : | 500 mm | |
| Largeur : | 333 mm | |
| Hauteur : | 125 mm |
| Longueur : | 515 mm | + 3,0% |
| Largeur : | 290 mm | – 12,9% |
| Hauteur : | 140 mm | + 12,0% |
| Longueur : | 500 mm | -% |
| Largeur : | 276 mm | – 17,1% |
| Hauteur : | 125 mm |
Intégration dans le projet
Comme déjà évoqué, la taille de ce modèle réduit de Batmobile est déterminante en terme de dimensionnement générale du projet. Dans la phase de conception préliminaire une modélisation 3D à l’échelle 1/12 de la Batmobile a été utilisée. Dans la phase de conception détaillée et de prototypage, il est nécessaire à présent de valider l’intégration dimensionnelle de ce véhicule.
Plateforme rotative
Le premier système du projet BATLab112, directement impacté par l’intégration du modèle réduit de la Batmobile, est la plateforme rotative. La longueur du modèle réduit de la Batmobile, impose une dimension minimale du diamètre de la plateforme. Par contre, le diamètre de cette plateforme est une contrainte déterminante pour le dimensionnement d’autres systèmes et au final, sur les dimensions hors tout de la maquette. Par conséquent, de la longueur de ce modèle réduit, dépend le respect des objectifs de transportabilité du diorama pédagogique.
Pont élévateur
Le deuxième système du projet BATLab112 visé par l’intégration du modèle réduit de la Batmobile est le pont roulant. La hauteur sous poutres de ce pont, destinée à l’espace de manoeuvre des bras robotiques, cumulée à la hauteur des poutres, ainsi que la hauteur de la Batmobile, influe directement sur la hauteur finale de la maquette. Par conséquent, la hauteur du modèle réduit est une contrante déterminante dans le dimensionnement général du diorama de la Batcave.
Voir aussi
La Batmobile à l’échelle 1/12 du projet BATLab112

Cet article présente le modèle à l’échelle 1/12 de la Batmobile utilisé comme prototype pour réaliser le diorama pédagogique du projet BATLab112.… Lire la suite →
Première publication :
Dernière mise à jour :
Temps de ecture :
4–5 minutes
Mots clés :
Cet article contient des références à des marques commerciales. Ceci n’est en aucun cas un placement de produit ou de la publicité. Ces produits sont cités au titre de la référence qu’ils représentent dans la recherche de solutions techniques dans le contexte du projet BATLab112.
Introduction
Il est important de souligner que si cette article est publié alors que le projet entre dans sa phase de conception détaillée, cette analyse du « prototype » de la Batmobile du projet BATLab112 date des tous premiers instants du projet. En effets, le choix du modèle et de la taille de la Batmobile sont des éléments déterminants nécessitant d’être pris en compte dès le début du projet.
La phase de définition des besoins à souligner l’importance de la Batmobile, une icône indissociable du personnage de Batman et de la Batcave. Le modèle de la Batmobile, pris en référence pour la réalisation du projet BATLab112, a été défini dans un précédent article, pour dimensionner les équipements de la Batcave du projet. Le modèle de la Batmobile du projet Batlab112 est celle des films de Zack Snyder ; Batman vs Superman, Dawn of Justice de 2016, et Justice League de 2017-2021.

Le choix d’un modèle réduit
Il existe de nombreux modèles réduits de la Batmobile des films de Zack Snyder, mais seulement deux sont présentés comme compatibles à l’échelle 1/12. Ce sont des modèles réduits relativement onéreux à l’achat et plutôt destinés à des collectionneurs.
Ultimate Justice League Batmobile

Présentation générale
Ce modèle réduit est commercialisé par Mattel™. Ce modèle est aujourd’hui officiellement présenté comme un modèle réduit à l’échelle 1/10. Il faut préciser que lors de sa sortie commerciale, il était alors présenté comme un modèle compatible à l’échelle 1/12, comme l’attestait la figurine livrée avec. La taille de cette figurine était similaire à celle de figurines de marques célèbres à l’échelle 1/12.
Avantages de ce modèle
En terme de perspectives d’intégration dans le projet BATLab112, ce modèle réduit de Batmobile est très intéressant. Il dispose d’une qualité de fabrication très soignée, offrant un niveau de réalisme tout à fait satisfaisant avec les ambitions d’un diorama pédagogique. De plus, ce modèle radio-commandé très abouti, permet d’envisager son intégration dans les automatismes du projet BATLab112 de manière relativement directe et rapide.
Inconvénients de ce modèle
Même si à l’heure où cet article est publié, le prix de ce modèle réduit est en général inférieur, il était initialement d’un montant de l’ordre de 400€ pour un modèle neuf et de 200€ pour un modèle d’occasion. Ce montant représentait un inconvénient important pour le projet. En effet, ce modèle réduit devait être intégré très tôt, dès la phase de conception préliminaire, sans certitude sur la faisabilité du projet à cette échelle.
Comme évoqué lors de la présentation générale de ce modèle réduit, son échelle ne respecte pas le ratio 1/12. Sa capacité à être compatible avec des figurines à l’échelle 1/12, n’est pas un critère suffisant pour le projet BATLab112. Ses dimensions plus importantes que l’échelle 1/10 lui confère, est une source de difficultés d’intégration dans le projet.
DC Comics™ Justice League Multiverse Batmobile

Présentation générale
Ce modèle réduit est commercialisé par Mattel™. Ce modèle réduit est présenté comme respectant le ratio 1/12 et compatible avec des figurines à cette échelle. Ce modèle réduit est plutôt rare sur le marché français. Il est très apprécié par les collectionneurs comme modèle d’exposition pour sa conformité avec l’échelle 1/12.
Avantages de ce modèle
Ce modèle réduit dispose d’une qualité de fabrication soignée offrant un niveau de réalisme tout à fait satisfaisant avec les ambitions d’un diorama pédagogique. Le prix de ce modèle réduit est d’environ 80$ pour un modèle neuf et peut s’élever jusqu’à plus de 150$ pour un modèle d’occasion du fait de sa rareté.
Inconvénients de ce modèle
Ce modèle réduit n’est pas radio-commandé et ne dispose d’aucun équipement électrique.
Conclusion
Le choix de l’échelle de réalisation du projet BATLab112 étant fixé pour respecter des contraintes de dimensions finales du diorama, il n’est donc pas envisageable d’opter pour une échelle 1/10. Intégrer un modèle réduit au ratio 1/10 aurait donc soit des conséquences en terme d’esthétique sur le rendu réaliste, soit en terme de contrainte d’intégration pour respecter les objectifs de transportabilité du diorama. Par conséquent, le modèle réduit – Ultimate Justice League Batmobile, n’est pas retenu pour le projet.
Le modèle réduit – Multiverse Justice League Batmobile, est celui retenu pour la réalisation du diorama pédagogique du projet BATLab112. Même si ce dernier est dépourvu de commande électrique, sa conception est compatible avec une intégration à postériori de système de commande à distance, permettant de l’intégrer dans les automatismes du diorama.
Revue de détail


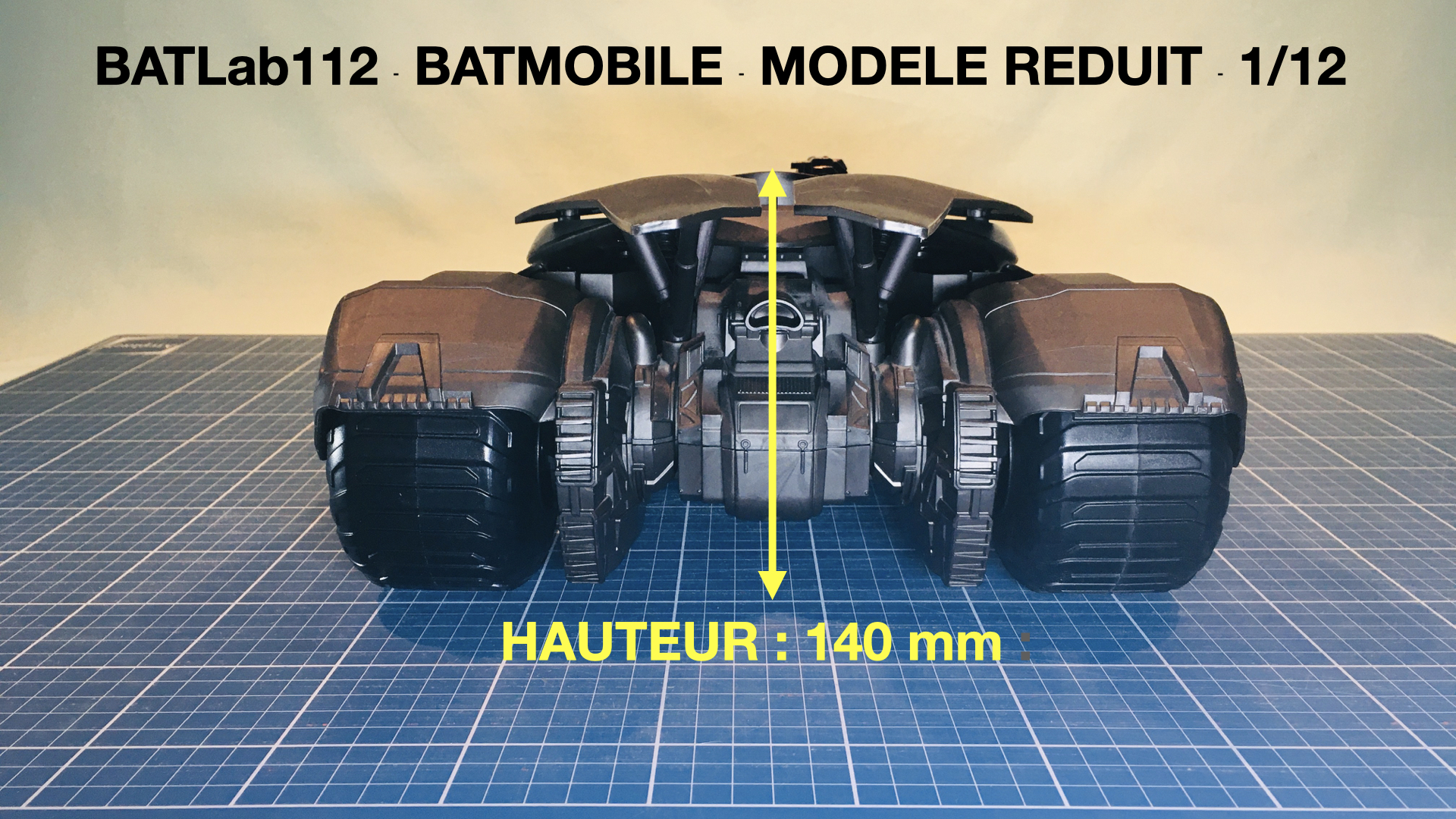

Le tableau suivant, compare les côtes attendues de ce modèle réduit de Batmobile avec celles du véhicule utilisé dans les films de Zack Snyder. Nous pouvons constater que les proportions ont été parfaitement respectées pour la longueur et la largeur. Il semble que la hauteur du modèle réduit soit légèrement plus grande que celle du véhicule réel.
| Echelle 1:1 | Echelle 1:12 | Mesure | Ecart | |
| Longueur | 6100 | 508 | 515 | + 1,4 % |
| Largeur | 3700 | 308 | 290 | – 5,8 % |
| Hauteur | 1500 | 125 | 140 | + 12 % |



