Résumé :
Cet article présente la réalisation du prototype de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
+ d’infos :
Actualisé :
Mots clés :
Introduction
La réalisation du prototype de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement.
Voir l’article …

Présentation générale

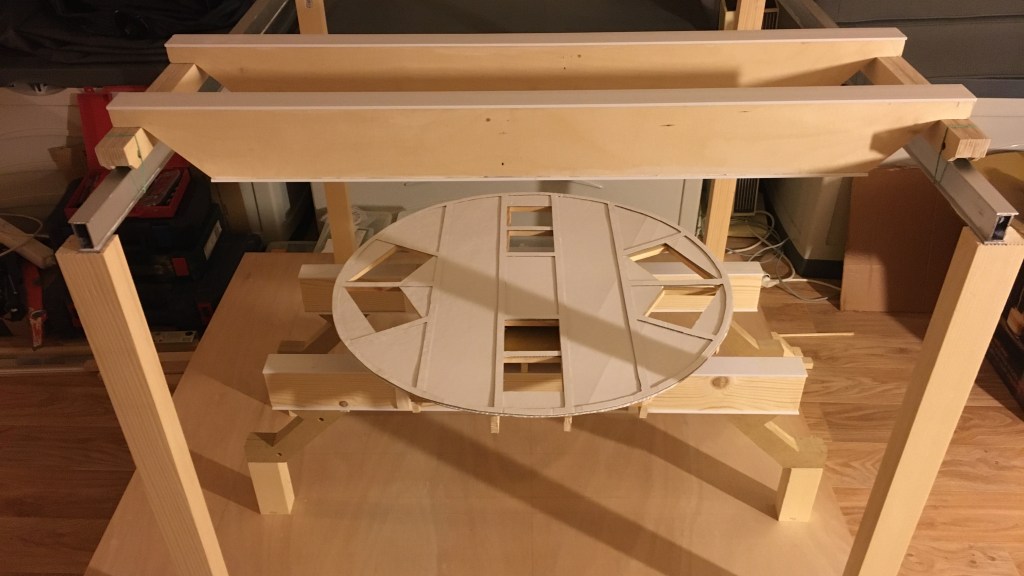
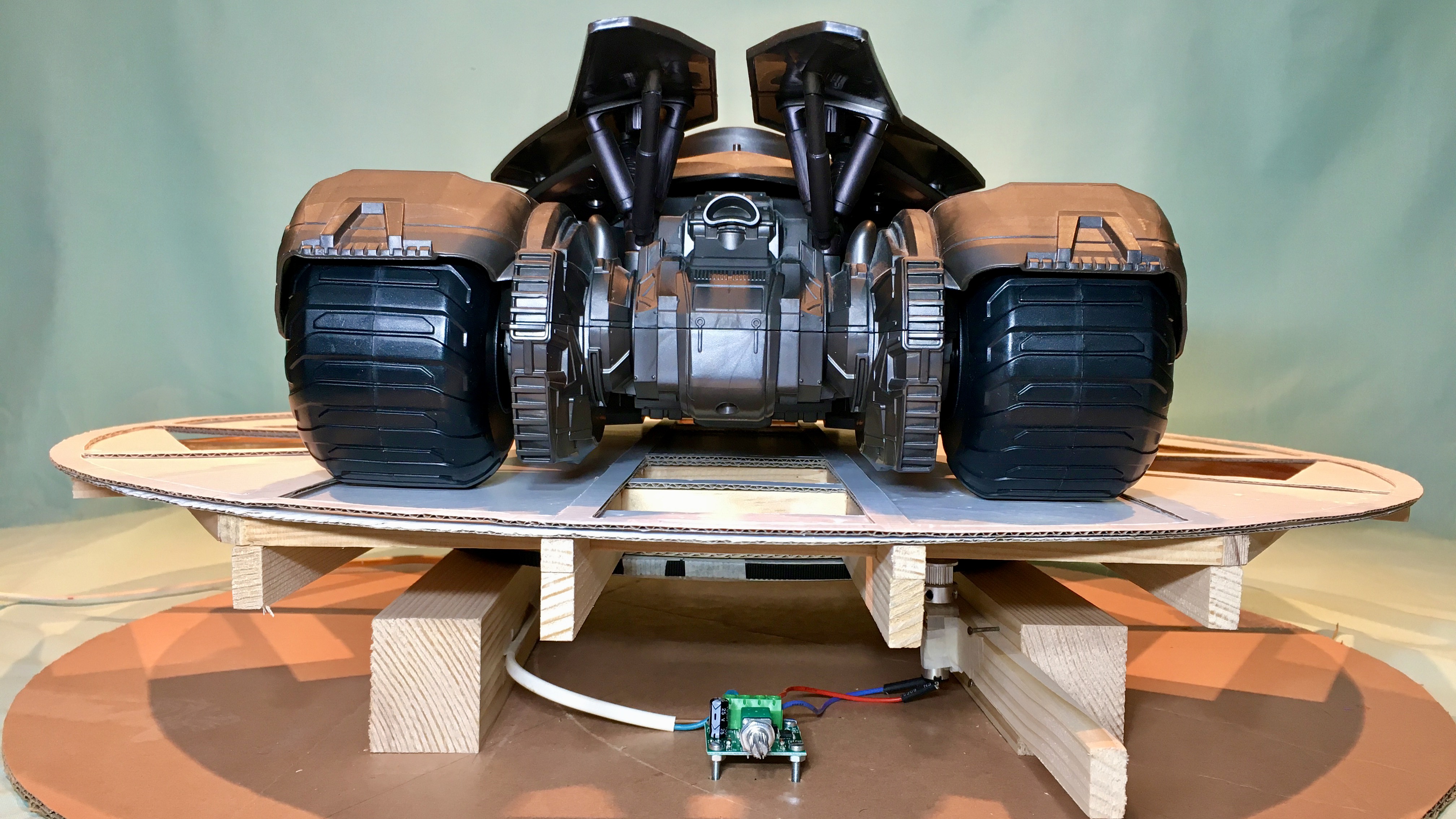
La structure de la plateforme a été fabriquée en bois pour des raisons économiques mais aussi de facilité et rapidité de mise en oeuvre, le montage ayant pu être réalisé par simple collage. La plaque de couverture a été fabriquée en carton. La liaison pivot est assurée par un roulement à bille de type Lazy Susan, généralement utilisé pour des plateaux tournant de table.
La réalisation de ce premier prototype de la plateforme rotative de la Batcave du projet BATLab112 poursuit plusieurs objectifs. Il s’agit dans un premier temps de valider le design issu de la conception préliminaire et dans un deuxième temps de tester la motorisation de ce système.
- Valider le design technique
- Valider le design fonctionnel
- Valider le design mécanique
- Tester la motorisation du système
Vues de détails
Design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
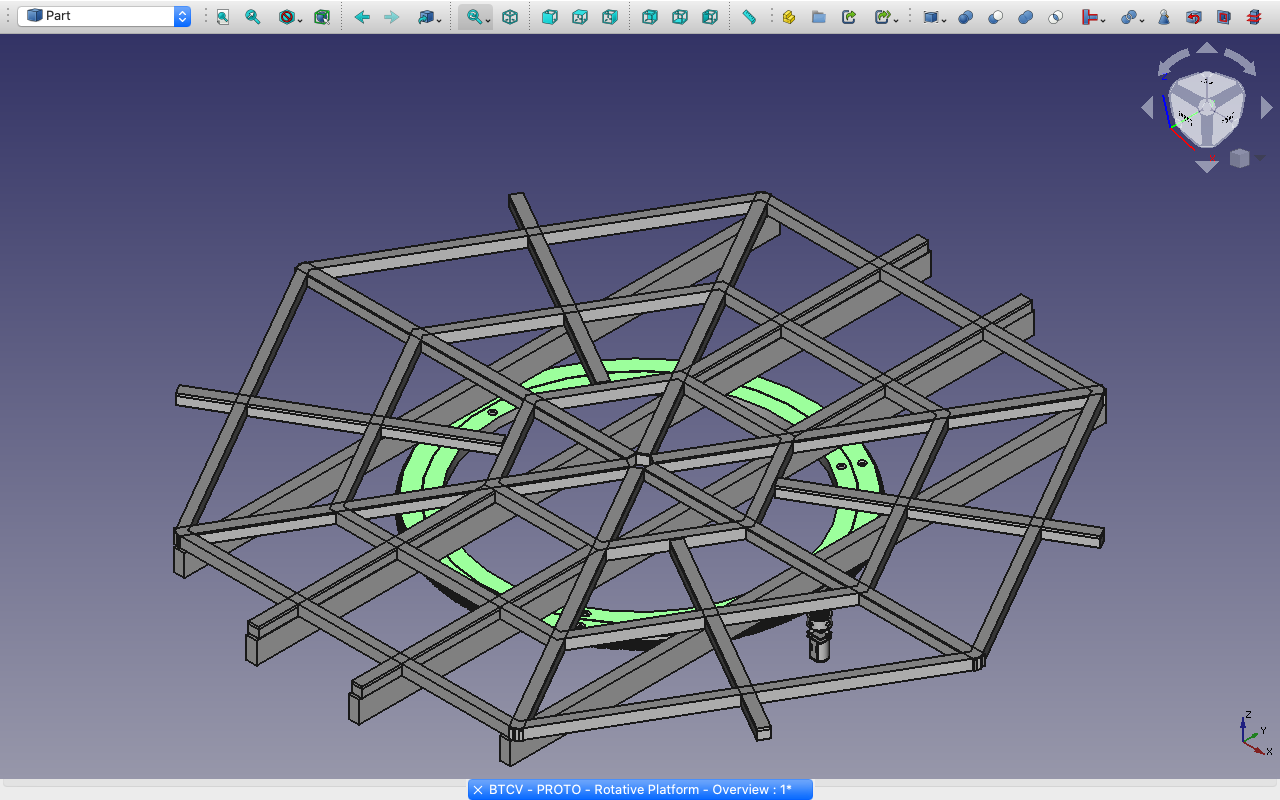
Conception préliminaire

Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite à des différences de côtes rencontrées lors de la réception de pièces manufacturées.
Prototype n°1

Les différents éléments ont été assemblés par collage. La fabrication de la structure en bois est plutôt satisfaisante. Même si les imperfections des pièces de bois utilisées ne permettent pas une précision au millimètre, cette structure présente une surface d’appui pour le plateau suffisamment plane. Elle est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Pour améliorer la précision de fabrication, une solution consisterait à rectifier toutes les pièces de bois avant assemblage ou d’opter pour des profilés aluminium.
Design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le poids total, de la plateforme et du modèle réduit de la Batmobile, doit être le plus faible possible, pour autoriser l’utilisation d’un micro-moteur pour la rotation, afin d’être conforme avec les exigences d’échelle 1/12 du projet. Il s’agit donc ici de contrôler particulièrement si l’utilisation de matériaux légers est compatible avec l’assemblage du roulement à bille plus lourd.
Prototype n°1

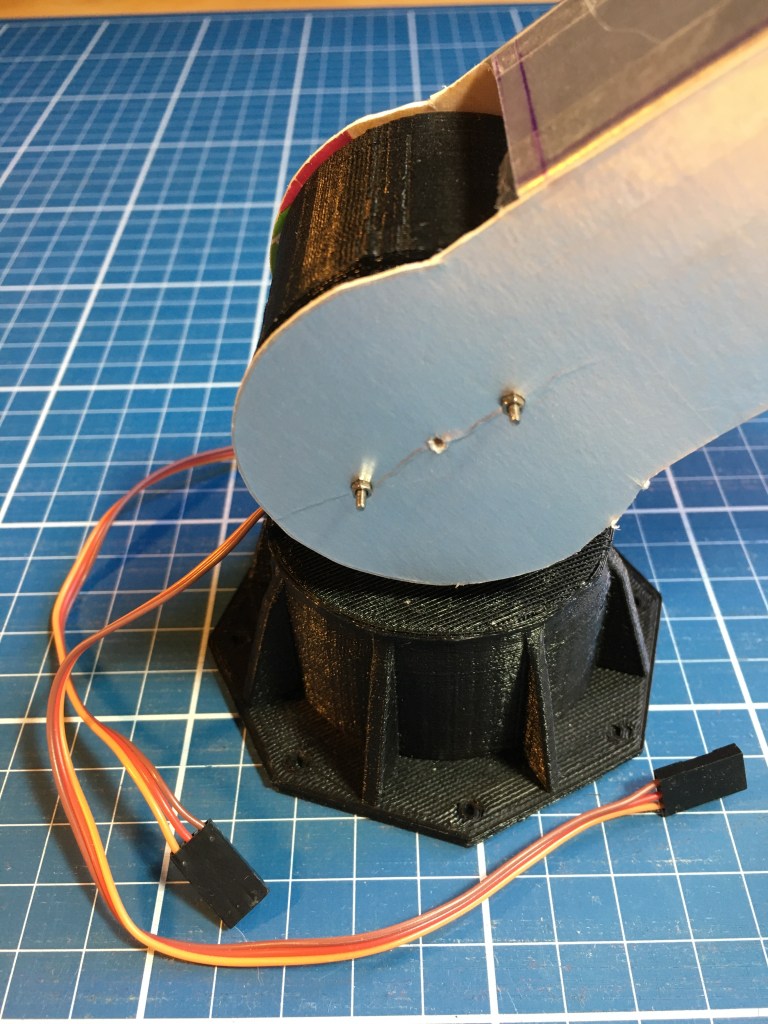
L’assemblage de la structure en bois sur le roulement à billes de type Lazy Susan est réalisé grâce à 1 cercle de carton. Ce cercle est collé sur la structure. Les pions (en blancs sur la photo) fixent l’ensemble sur le roulement à billes. Cet assemblage est satisfaisant pour solidariser la structure en bois avec la couronne extérieure du roulement à billes. Il autorise la rotation de l’ensemble par rapport à la couronne intérieure. Le design fonctionnel est donc validé.
Une amélioration consisterait à réaliser le cercle d’assemblage entre la structure en bois et le roulement à billes dans un matériau plus rigide que du simple carton d’emballage ce qui éviterait les éventuelles déformations.
Résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids du modèle réduit de la Batmobile.
Conception préliminaire

Le plateau de la plateforme doit être d’une épaisseur très mince (inférieure à 2mm), pour des raisons de cohérence avec l’échelle 1/12 du projet. Il est nécessaire de s’assurer d’une part que sa réalisation puisse se faire dans un matériau suffisamment léger (ici du carton) pour ne pas rendre l’ensemble trop lourd pour la capacité des moteurs du pont élévateur et de la plateforme. D’autre part, il est aussi nécessaire de s’assurer que ce plateau ne se déforme pas sous le poids du modèle réduit de la Batmobile.
Prototype n°1
Le plateau de la structure est découpé dans une plaque de carton d’emballage d’épaisseur 1mm. Dans un premier temps, ce plateau est simplement posé sur la structure en bois. L’ensemble structure et plateau supporte tout à fait le poids du modèle réduit de la Batmobile. Le plateau ne se déforme pas sous le poids de la Batmobile. L’architecture de la structure de la plateforme associé à un plateau de faible épaisseur est donc validée.
Une amélioration consisterait à réaliser le plateau par découpe laser pour obtenir une découpe plus précise.
Motorisation
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
L’engrenage de transmission est réalisé avec une poulie montée sur l’axe du moteur et une courroie GT2 5mm entourée autour du diamètre extérieur du roulement à billes. La courroie n’a pas été collée mais juste maintenue par du ruban adhésif. Le moteur est lui aussi simplement maintenu par du ruban adhésif contre un des supports provisoires de la plateforme. Le test est concluant malgré un montage sommaire. Cependant, ce montage ne permet pas de réaliser une rotation complète de la plateforme à cause de la présence du ruban adhésif.
La prochaine version de cette transmission devra intégrer le collage définitif de la courroie ainsi qu’une fixation plus appropriée du moteur.
Moteur
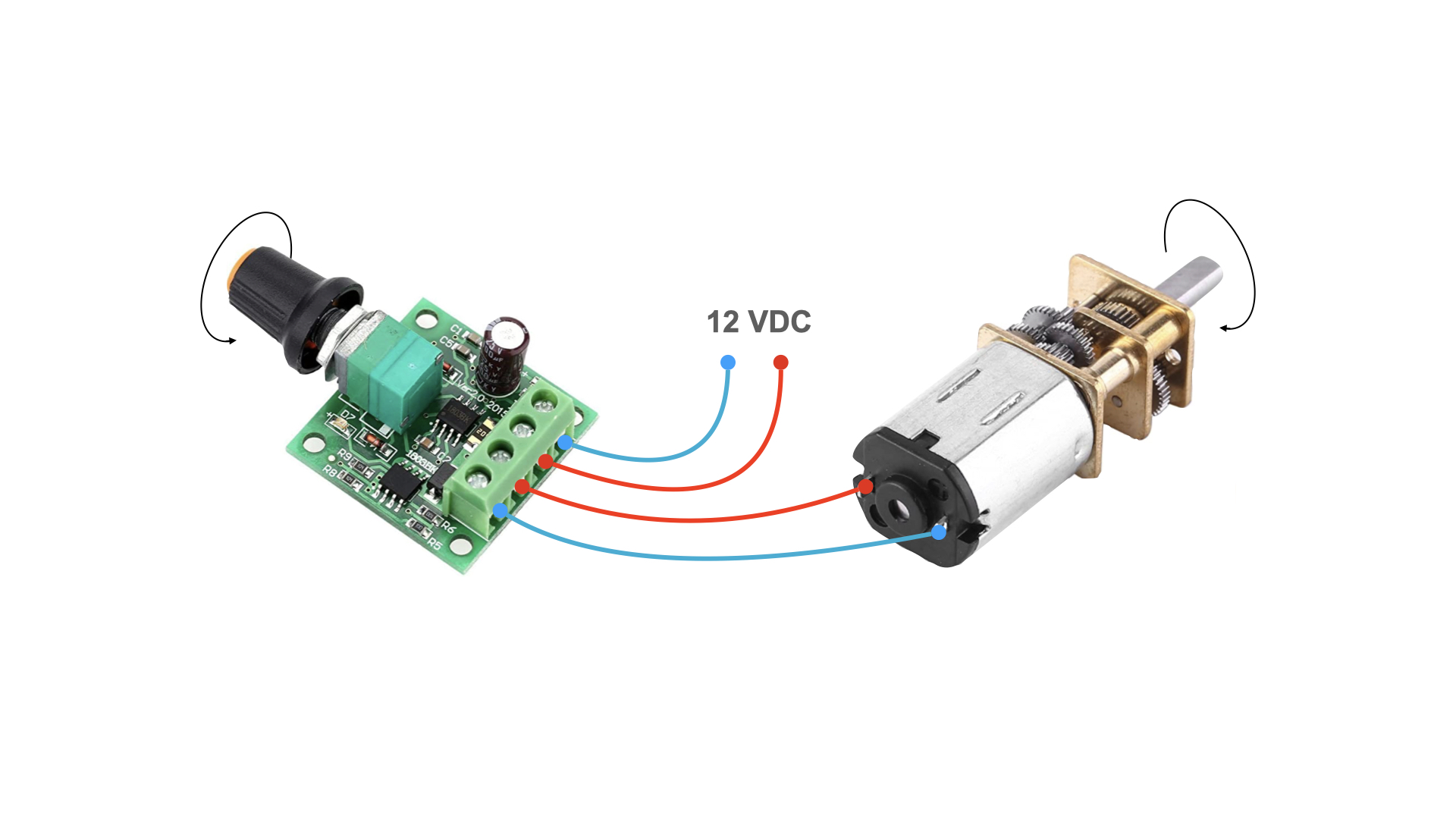
Ce test de motorisation a été réalisé avec un micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler la tension d’alimentation du moteur et ainsi ajuster la vitesse de rotation de la plateforme. Le couple du moteur associé au rapport de réduction de l’engrenage suffit pour entrainer l’ensemble ; plateforme et modèle réduit de la Batmobile. Le test de motorisation est donc validé.
Validation fonctionnelle
Conclusion
Ce premier prototype de la plateforme rotative de la Batmobile équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.