Cet article présente la réalisation du modèle opérationnel de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
L’intégration du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la l’intégration du pont élévateur. Voir l’article …
Ce modèle opérationnel de la plateforme rotative de la Batmobile est réalisé à partir du prototype. Le plateau de la plateforme est repris et peint. La transmission mécanique de la rotation est modifiée pour s’adapter sur le pont élévateur.
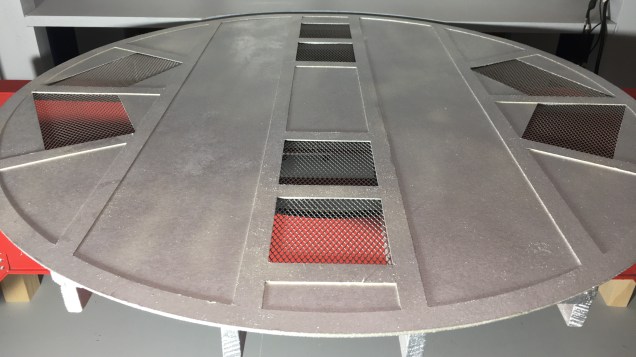
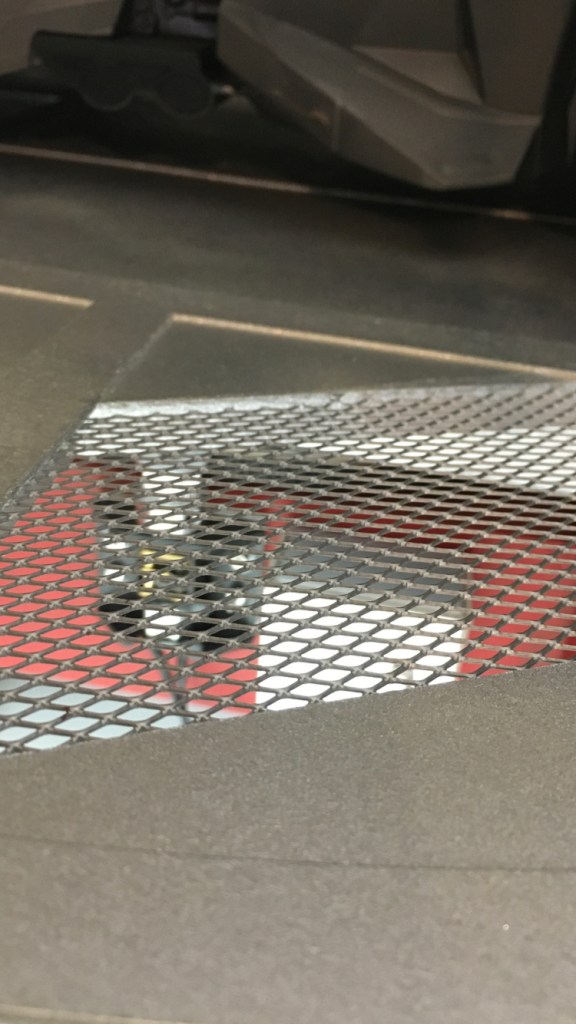
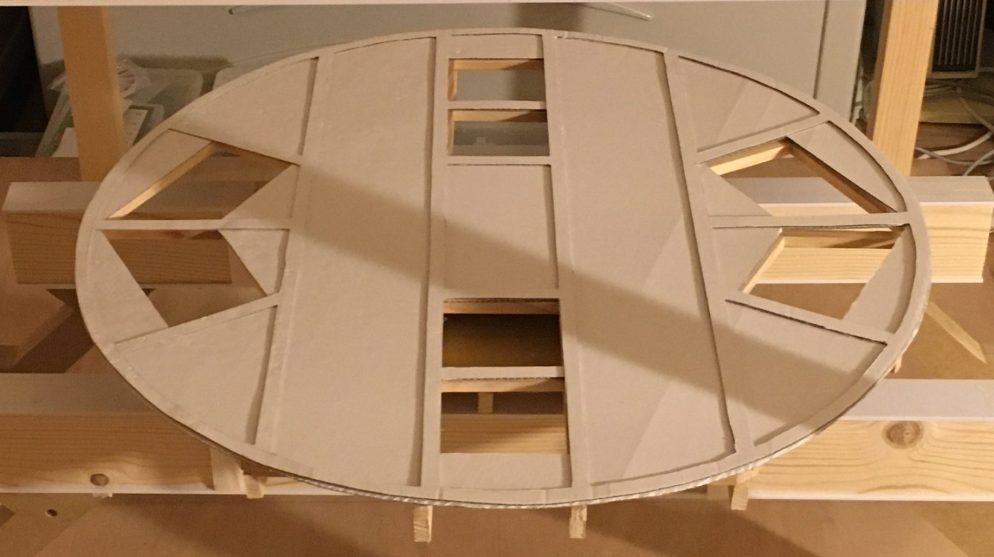
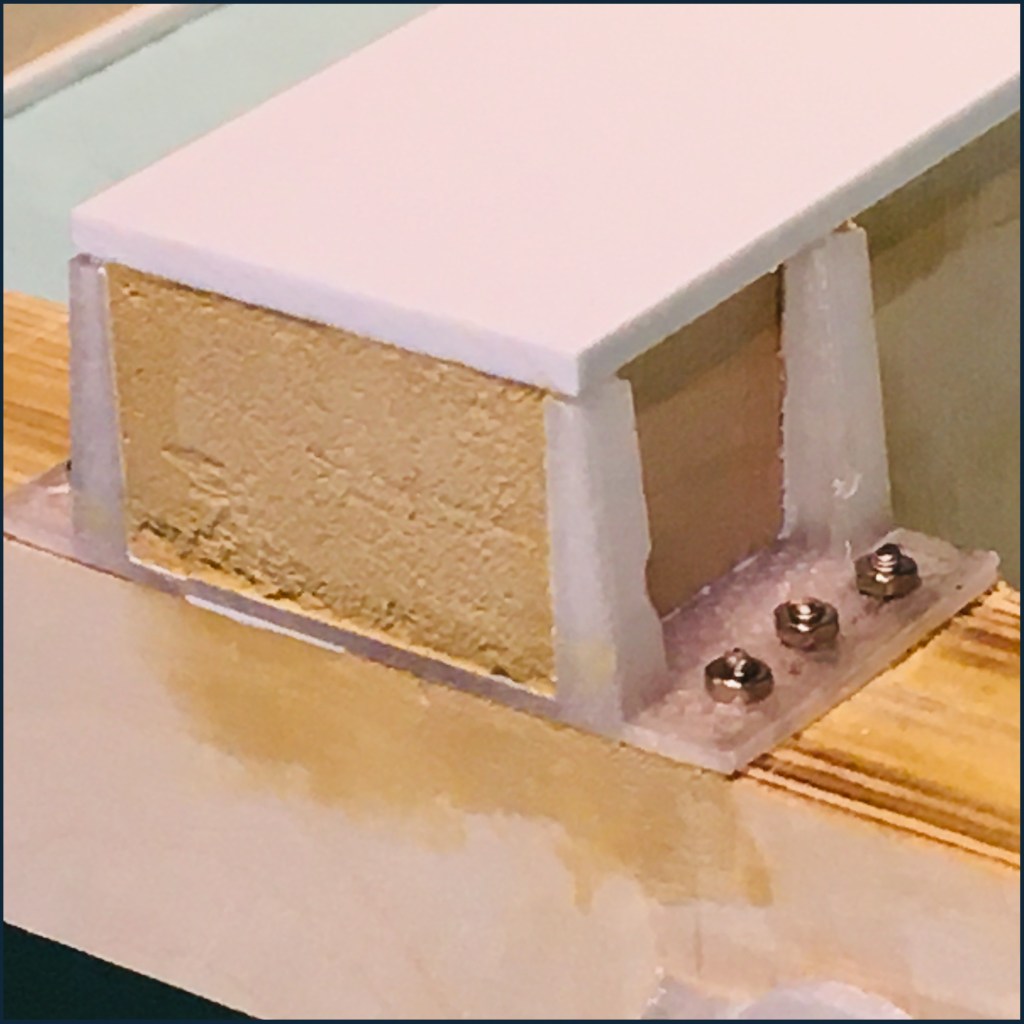
La structure en bois de la première version de la plateforme rotative a été reprise et poncée pour présenter deux surfaces parfaitement planes et être ensuite peintes (Photo N°1). Un nouveau plateau de la plateforme a été réalisé puis peint aussi de couleur gris métallique pour un rendu plus réaliste. L’assemblage de ce plateau sur le roulement à bille de transmission de la rotation est réalisé par quatre pions de positionnements (Photo N°2). Les ouïes du plateau ont été équipées de grilles collées par dessous (Photos N°3 & 4).
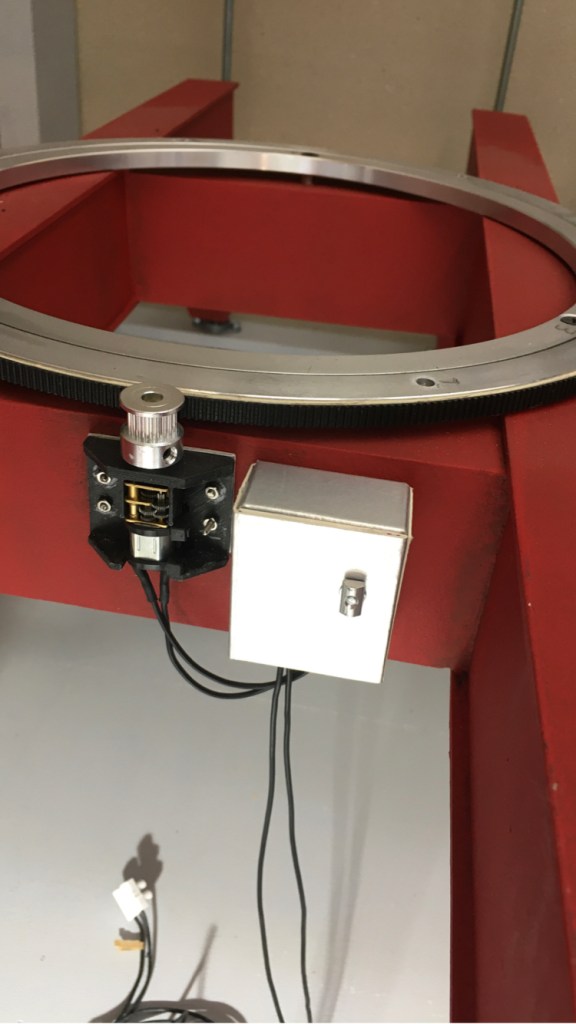
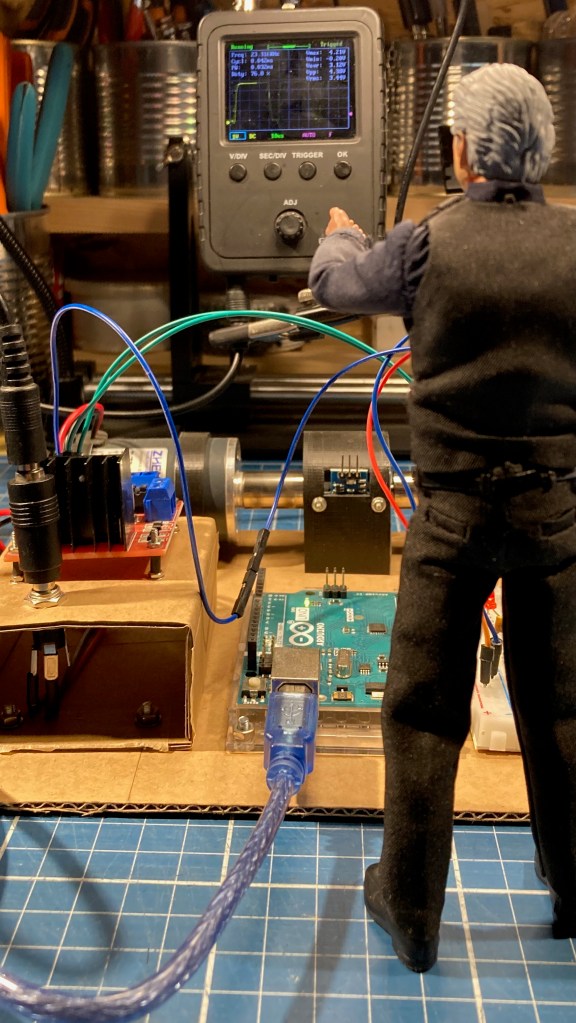
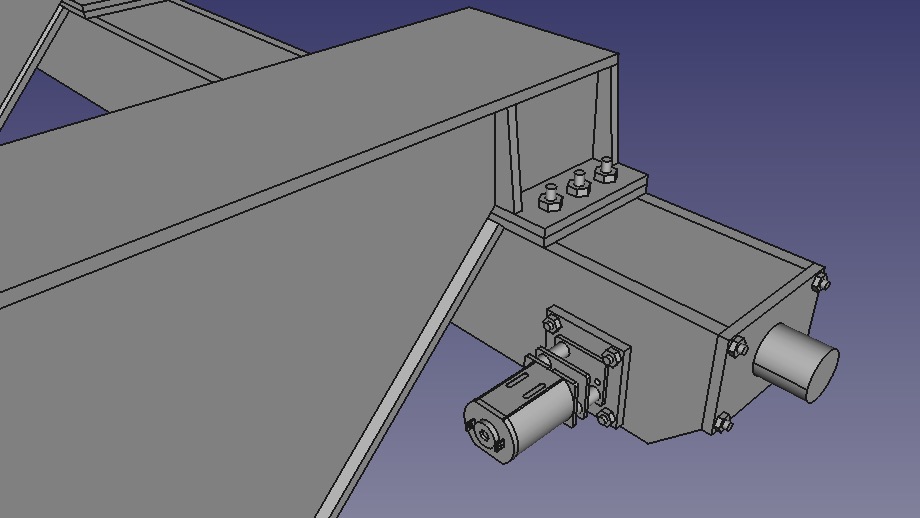
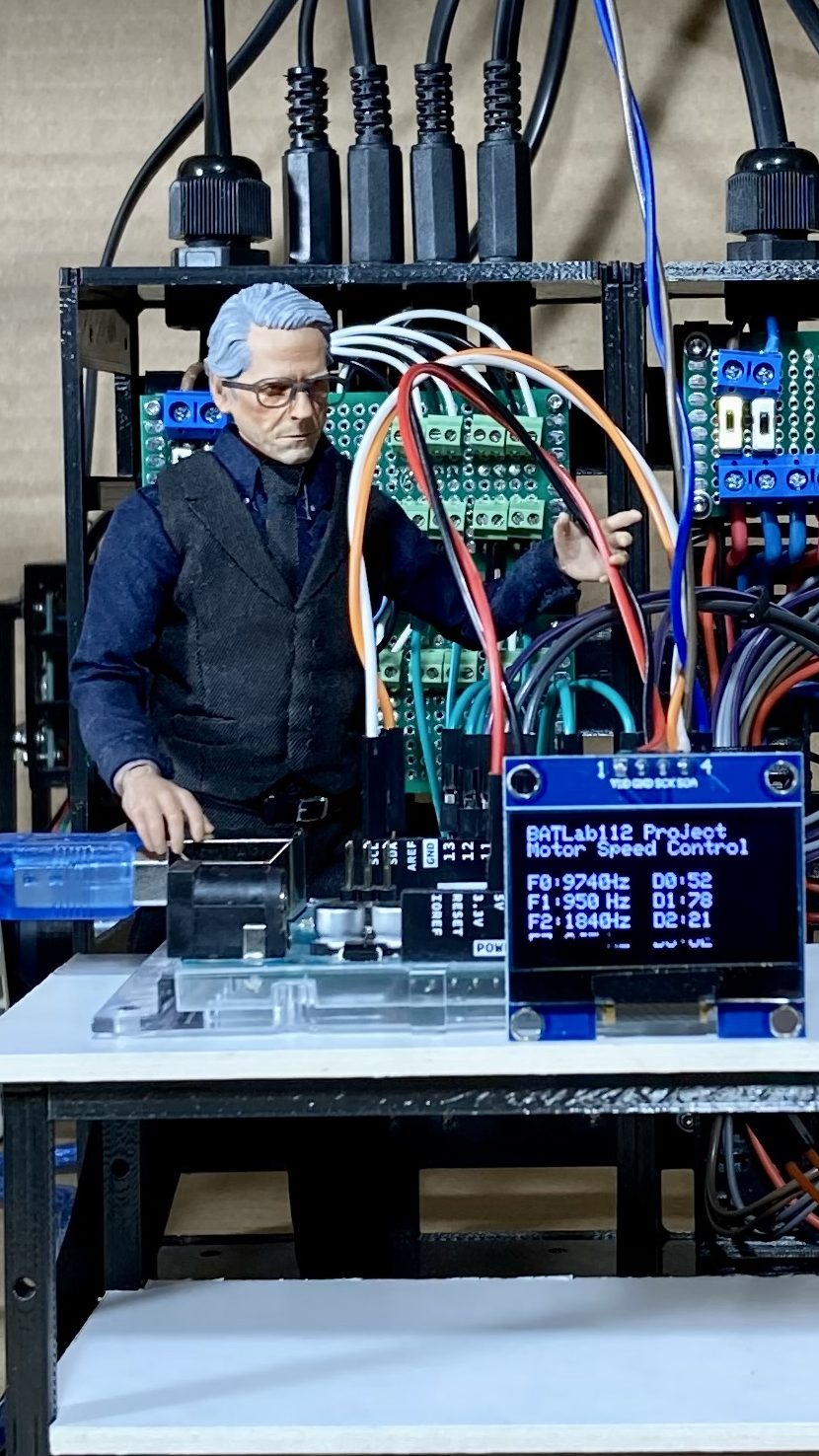
La motorisation et la transmission ont été particulièrement améliorées. Le design de la pièce de fixation du moteur a été modifié. Une armoire de câblage électrique permet de brancher ou débrancher l’alimentation électrique du moteur, en respect avec un principe de câblage réaliste. La courroie crantée a été fixée définitivement sur le roulement à bille de type Lazy-Susan (Photo N°1). Un nouveau test des commandes électroniques a été réalisé avec succès (Photo N°2). L’ensemble du moteur et l’armoire de câblage présentent un rendu réaliste satisfaisant (Photo N°3 & 4).
Validation fonctionnelle
Les vidéos suivantes montrent le bon fonctionnement de la plateforme rotative. La première vidéo est un test fonctionnel réalisé avec le prototypage de l’électronique de commande. La deuxième vidéo est un test fonctionnel réalisé avec le prototype du pupitre de commande V1.
Conclusion
Le design de ce modèle opérationnel de la plateforme rotative est satisfaisant. Les principes d’assemblages des différents sous-ensembles restent sommaires et seront améliorés ultérieurement pour présenter un niveau de réalisme plus en adéquation avec les objectifs pédagogiques du projet. L’électronique de commande ainsi que la gestion de l’affichage des commandes et leur l’horodatage par les carte Arduino sont opérationnels. Il reste à réaliser et valider la programmation des commandes automatiques.
Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
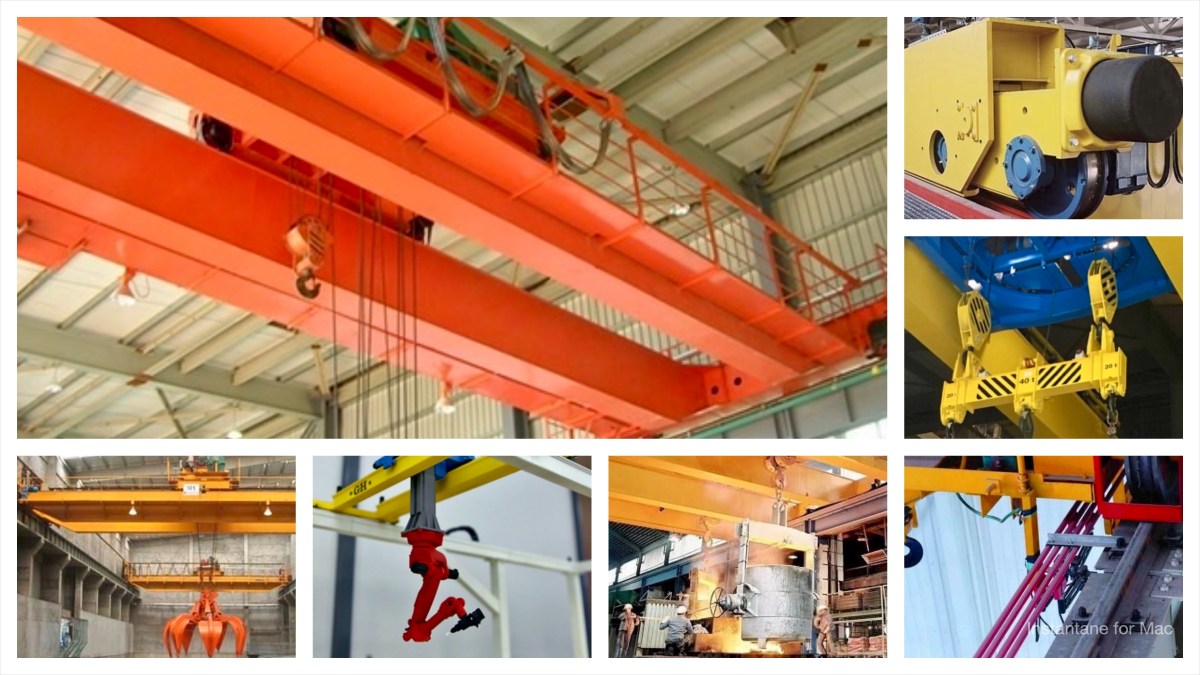
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.
Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
Cartes électroniques de puissance
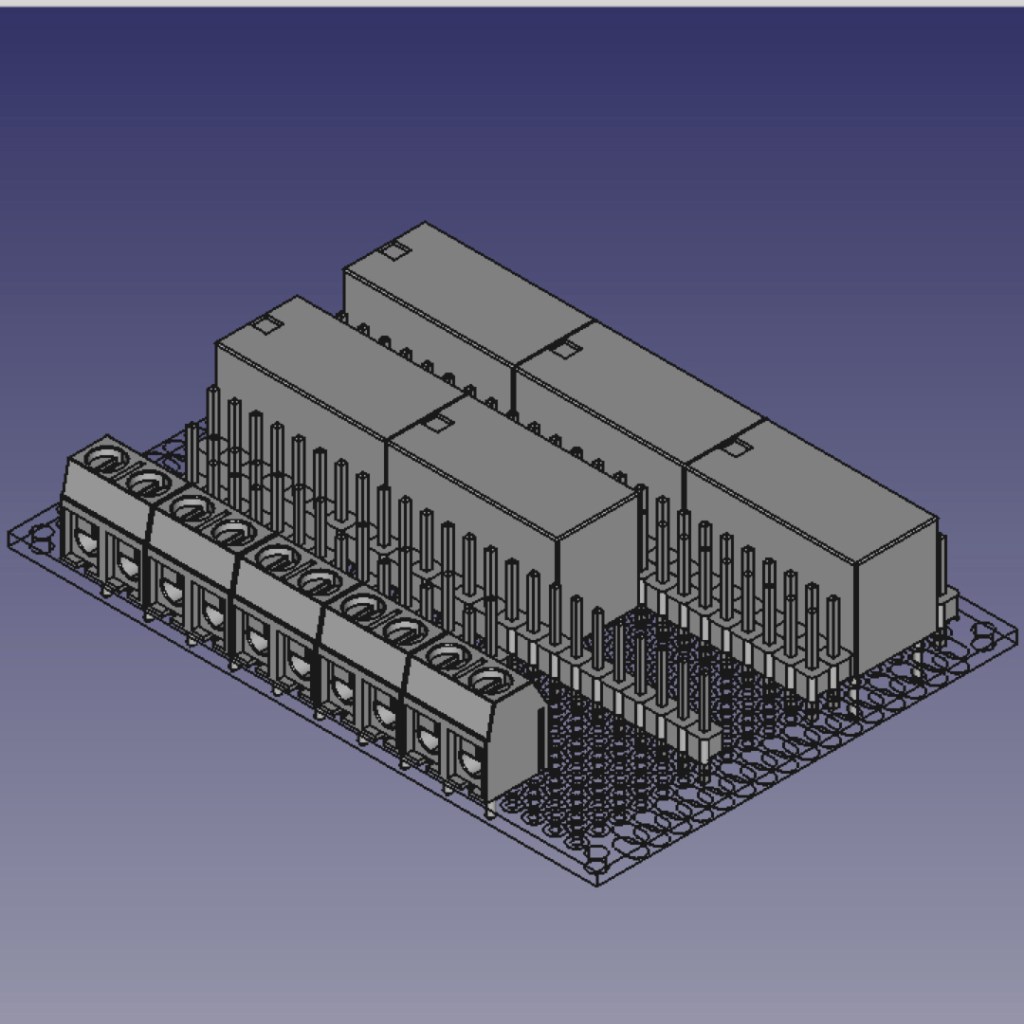
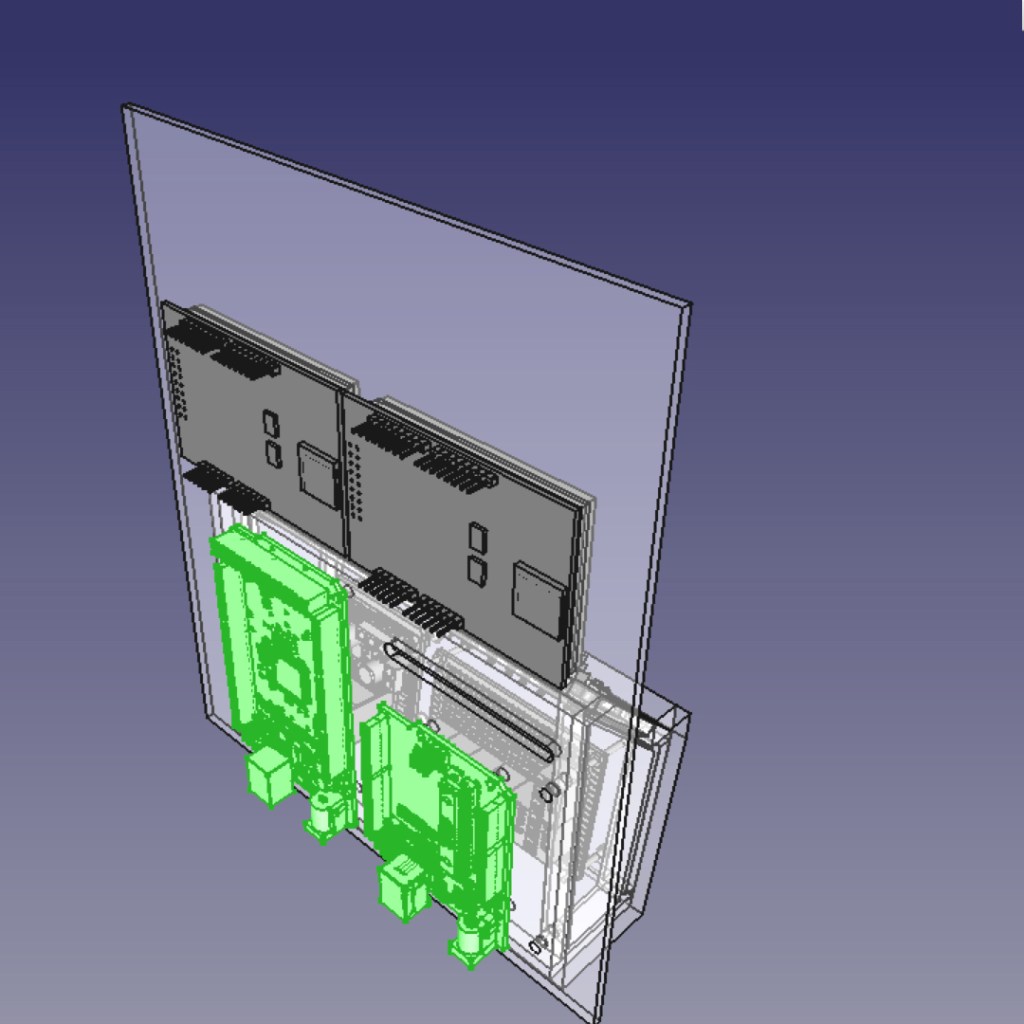
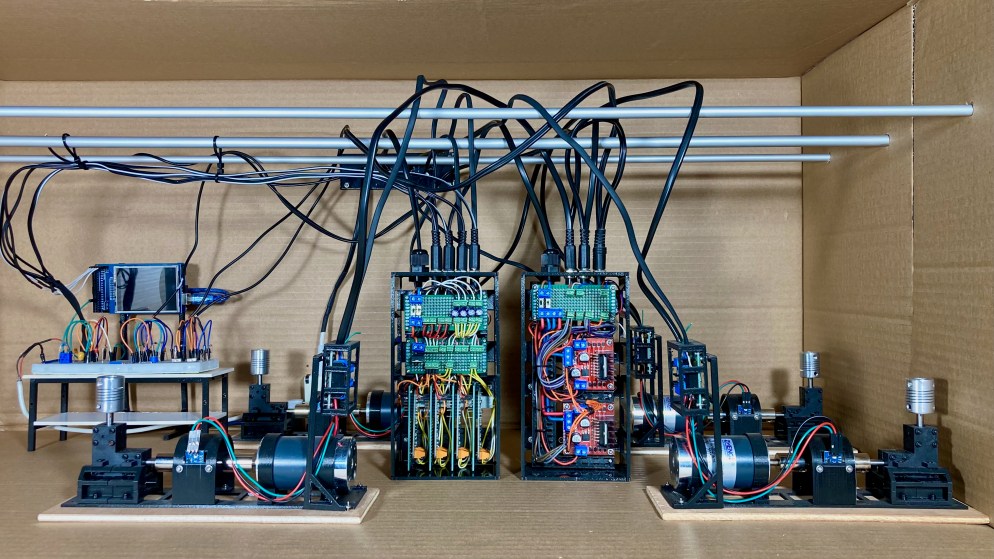
Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
Cartes Arduino
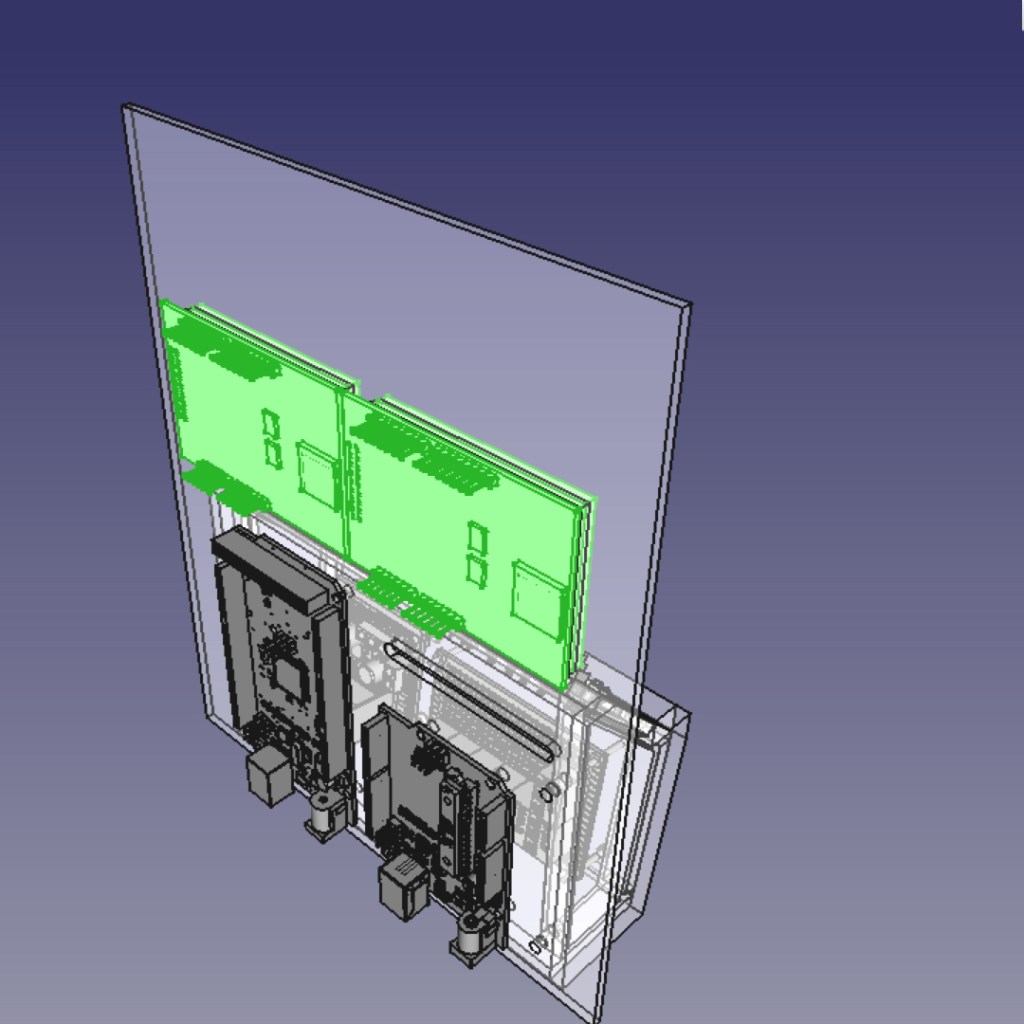
Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
Panneau des commandes
La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
Ecrans de contrôle
Modélisation 3D
FreeCAD
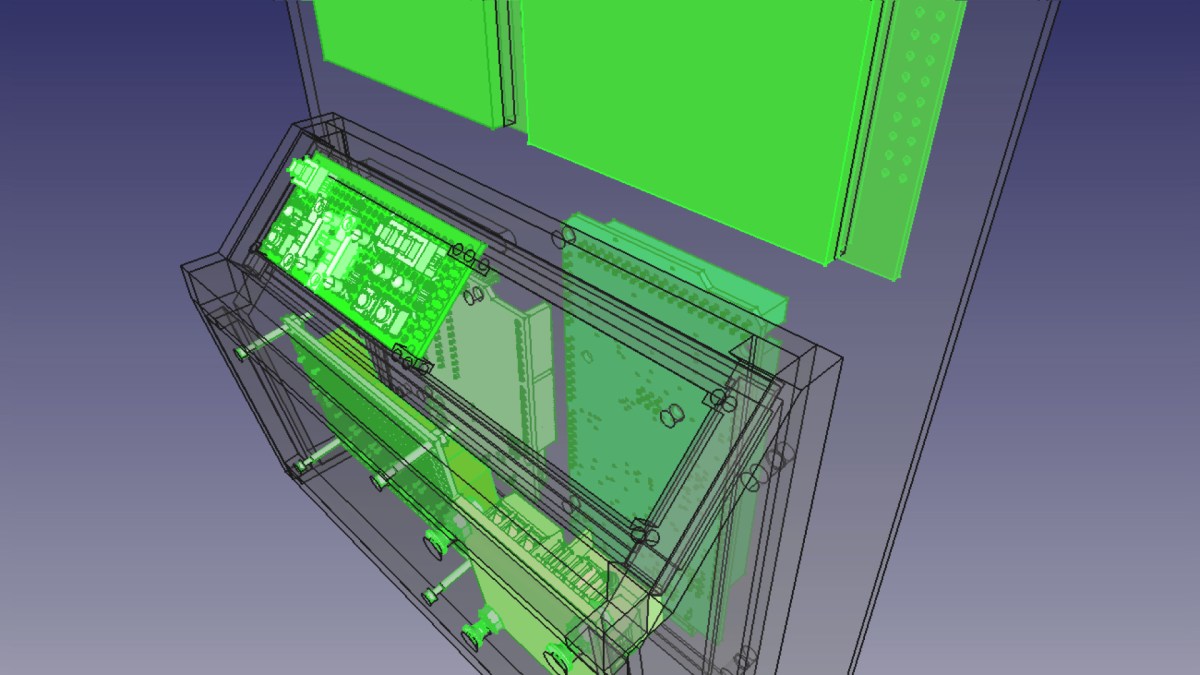
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.
Depuis le point d’avancement précédent, l’intégration du pont roulant bipoutre dans le diorama de la Batcave est à présent terminée. Après avoir été peint en couleur rouge « sécurité » comme le pont élévateur, le pont roulant bipoutre est équipé de ses deux moteurs ainsi que de leurs deux armoires électriques de raccordement. La présentation avec la Batmobile indique que les commandes électroniques de la plateforme rotative de la Batmobile sont en cours de validation.
Le prochain point d’avancement présentera l’avancement de la zone de contrôle des équipements industriels de l’atelier automatisé de la Batcave. Le premier prototype de la console de commande permettant de commander la rotation de la plateforme a été ajouté pour rendre compte de la futur intégration de ces appareils.
English
This text is an automatic translation from French. If you see any possible improvements, say so in the comments.
Since the previous progress point, the integration of the double-girder overhead crane into the Batcave diorama is now complete. After being painted in “safety” red like the lift, the double-girder overhead crane is equipped with its two motors as well as their two electrical connection cabinets. The presentation with the Batmobile indicates that the electronic controls of the rotating platform of the Batmobile are in the process of validation. The next progress point will present the progress of the industrial equipment control area of the automated workshop of the Batcave. The first prototype of the control console to control the rotation of the platform has been added to account for the future integration of these devices.
Español
Este texto es una traducción automática del francés. Si ve alguna posible mejora, dígalo en los comentarios.
Desde el punto de progreso anterior, la integración de la grúa aérea de doble viga en el diorama de Batcave ahora está completa. Tras ser pintado en rojo “seguridad” como el ascensor, el puente grúa birraíl está equipado con sus dos motores así como sus dos armarios de conexiones eléctricas. La presentación con el Batimóvil indica que los controles electrónicos de la plataforma giratoria del Batimóvil están en proceso de validación. El siguiente punto de avance presentará el avance del área de control de equipos industriales del taller automatizado de la Baticueva. Se ha añadido el primer prototipo de la consola de control para controlar la rotación de la plataforma para dar cuenta de la futura integración de estos dispositivos.
Timeline
Avancement du diorama
Derniers articles
Story
Sur les réseaux
Youtube
Cette vidéo est diffusée sur l’ensemble des réseaux du projet BATLab112.
Instagram
Dernier post sur le compte Instagram du projet BATLab112
Cet article présente la réalisation du modèle opérationnel du pont roulant bipoutre du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
Depuis ce précédent article, la structure en bois est restée inchangée, mais des évolutions au design général ont été apportées.
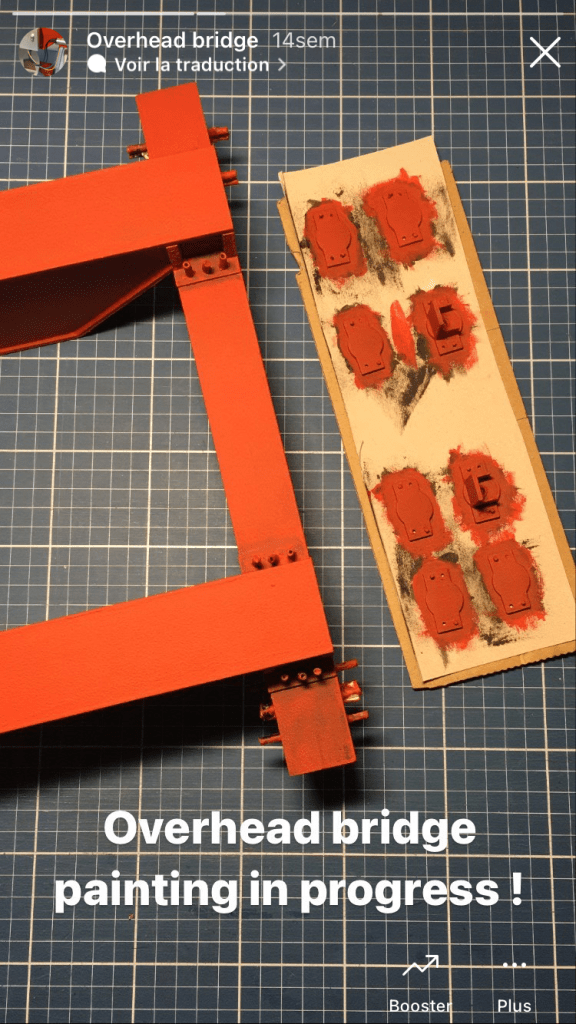
Tout d’abord, le pont roulant bipoutre est peint de couleur rouge « sécurité » (Photo n°1). Ce choix de couleur s’est fait à l’issue de la phase de parangonnage ayant montré que ces équipements industriels sont généralement peints soit en jaune, soit en rouge. Le choix de la couleur rouge est justifié par une approche « esthétique » du diorama.
Ensuite, les armoires de câblages des moteurs sont définitivement fixées sur une des poutres du pont roulant (Photos N°2 & 3). Ces armoires de câblage, autorise un raccordement électrique en toute sécurité, telles que l’on peut les trouver sur des équipements industriels.
La réalisation du diorama technique du projet BATLab112 requiert la mise en œuvre d’une infrastructure de commande fiable, didactique et cohérente avec les fonctions attendues du dispositif final. La console de commande, élément central de l’interface opérateur, constitue à ce titre un module critique. Elle assure l’articulation entre les commandes manuelles, les systèmes d’automatisation futurs et l’ensemble des actionneurs mécaniques, notamment le moteur de la plateforme rotative.
Après validation du concept mécanique de la console et de l’agencement des composants électroniques (écrans, boutons, commutateurs, microcontrôleurs), une première étape de prototypage électronique a été entreprise. L’objectif de cette phase est de vérifier la pertinence des choix techniques, d’évaluer l’ergonomie des modes de commande et de valider les comportements fonctionnels avant passage à une intégration définitive.
Le présent document propose une description détaillée de cette première version électronique, de son architecture générale aux essais menés sur maquette, en adoptant une démarche rigoureuse conforme aux standards de conception en électronique appliquée.
+ d’infos sur la conception préliminaire de la console de commande :
La structure électronique de la console de commande repose sur un schéma de principe élaboré à l’aide du logiciel libre KiCad, choisi pour sa flexibilité, sa richesse fonctionnelle et sa compatibilité avec les environnements de prototypage rapide.
L’architecture est organisée en deux sous-systèmes principaux :
Le module de gestion des commandes manuelles, intégrant les commandes de l’opérateur (boutons, commutateurs, voyants).
Le module d’interface de puissance, assurant la mise en forme et la distribution des signaux vers le moteur à courant continu responsable de la rotation de la plateforme.
Cette séparation fonctionnelle répond à un impératif de lisibilité du schéma mais également à une logique de modularité favorisant les évolutions ultérieures.
KiCad
Ce schéma électronique est réalisé avec la suite logicielle KiCad distribuée librement.
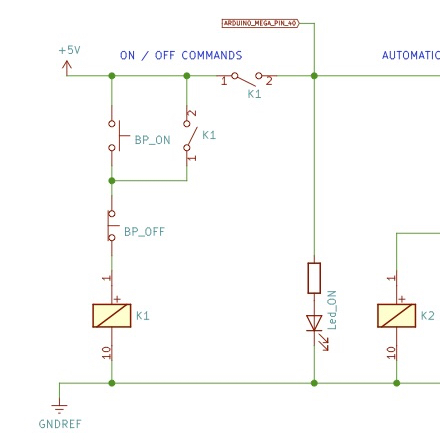
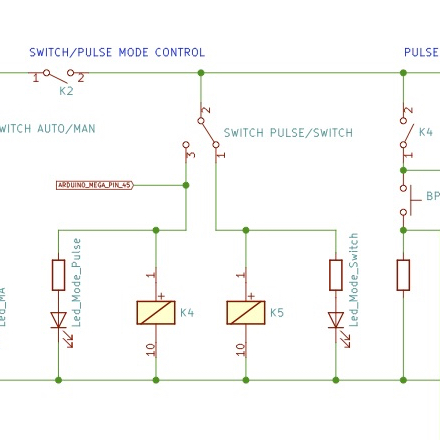
La partie supérieure du schéma se divisent en 5 parties dédiées à la gestion des commandes. La partie inférieure du schéma est dédiée à l’interface entre les commandes et l’alimentation du moteur de rotation de la plateforme.
Mise sous tension – arrêt général
La mise sous tension générale est réalisée au moyen d’un relais à auto-maintien, solution fréquemment adoptée dans les environnements industriels.
Le principe consiste à maintenir l’alimentation du circuit tant que le relais reste excité, l’opérateur pouvant interrompre cette excitation via un bouton poussoir d’arrêt. Cette architecture garantit la sécurité fonctionnelle du dispositif tout en simplifiant le comportement de remise en service.
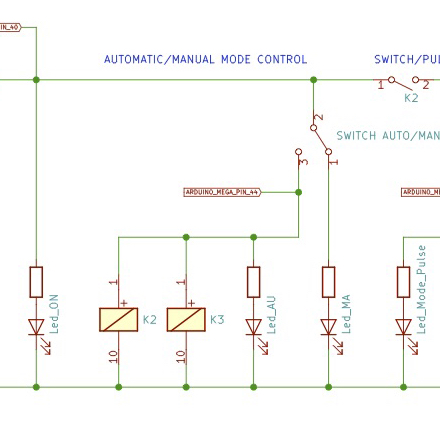
Sélection du mode Auto / Manuel
Un commutateur à deux positions permet de choisir entre un mode automatique et un mode manuel. Ce choix conditionne la provenance des signaux de commande :
En mode manuel, les boutons opérateur commandent directement les relais gérant le sens de rotation.
En mode automatique, ces mêmes relais sont pilotés par l’unité d’automatisation (qui sera intégrée dans une phase ultérieure du projet).
BP_ON : Bouton poussoir de commande du relais K1
K1 : Relais dont un contact est utilisé pour assurer son auto-maintien. Le deuxième contact est utilisé pour mettre sous tension tout le reste du montage.
BP_OFF : Bouton poussoir de coupure de l’alimentation du relais K1.
Led_ON : Led dont l’allumage dépend du deuxième contact du relais K1.
SWITCH AUTO/MAN : Commutateur permettant d’alimenter soit les relais K2, K3 et la Led Led_AU, soit la Led Led_MA seule.
K2 : Relais dont un des contacts autorise la mise sous tension de la suite du montage.
K3 : Relais dont les contacts aiguilles vers l’interface de puissance du moteur, les commandes manuelles ou les commandes automatiques.
Led_AU : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position AUTO.
Led_MA : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position MAN.
Sélection du mode Switch / Pulse
La sélection entre le mode switch et le mode pulse est assurée par un commutateur à 2 positions.
SWITCH PULSE/SWITCH : Commutateur permettant d’alimenter soit K4 et Led_Pulse, soit K5 et Led_Switch.
K4 : Relais dont un contact va autoriser les commandes manuelles en mode pulse.
K5 : Relais dont un contact va autoriser les commandes manuelles en mode switch.
Led_Pulse : Led dont l’allumage est commandé par le commutateur en position Pulse.
Led_Switch : Led dont l’allumage est commandé par le commutateur en position Switch.
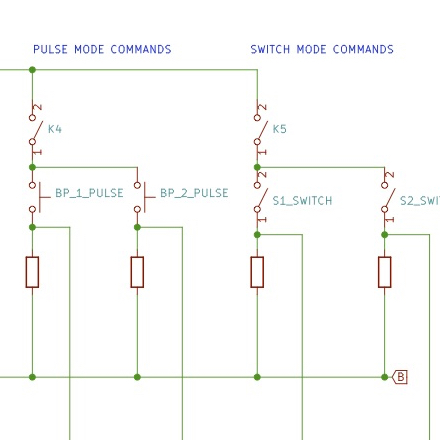
Switch & Pulse Commands
Les commandes manuelles en mode pulse sont assurées par des boutons poussoirs classiques. Il est nécessaire de maintenir l’appui sur le bouton poussoir maintenir la commande.
Les commandes manuelles en mode switch sont assurées par des boutons poussoirs à maintien de position. un premier appui bloque le bouton poussoir en position pour activer la commande. Un second appui, libère la position du bouton poussoir est arrête la commande.
PB1_PULSE: Bouton poussoir de commande de la rotation du moteur dans un sens.
PB2_PULSE : Bouton poussoir de commande de la rotation du moteur dans l’autre sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans un sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans l’autre sens.
Controller commands
Les contacts du relais K3 permettent d’aiguiller vers le moteur, soit les signaux des commandes manuelles soit ceux des commandes automatiques.
LED_R1 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
LED_R2 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
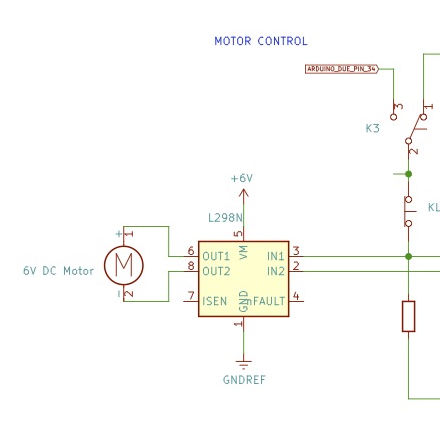
DC Motor controller
L’interface de puissance qui assure le pilotage du sens de rotation du moteur à partir des signaux de commandes numériques manuelles ou automatiques est une carte électronique basée sur un L298N.
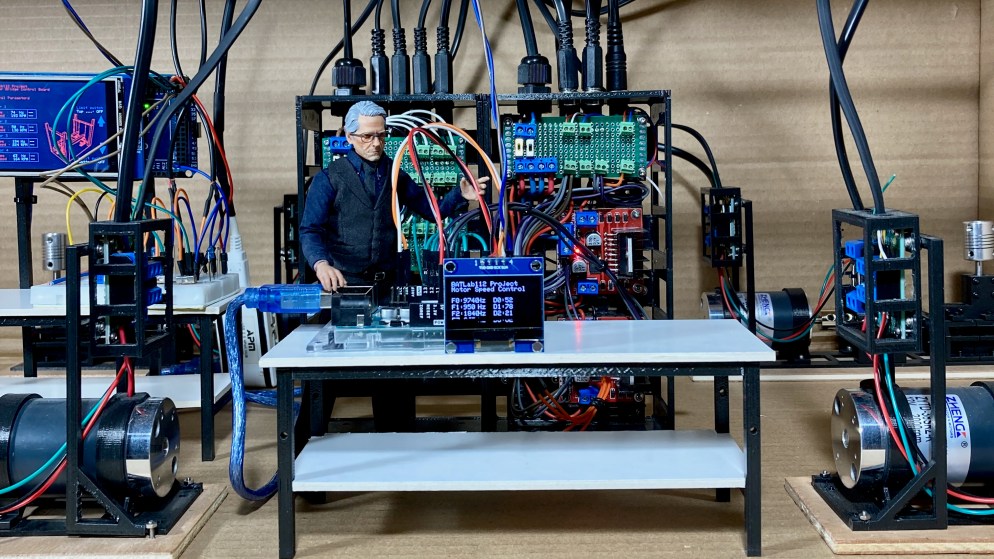
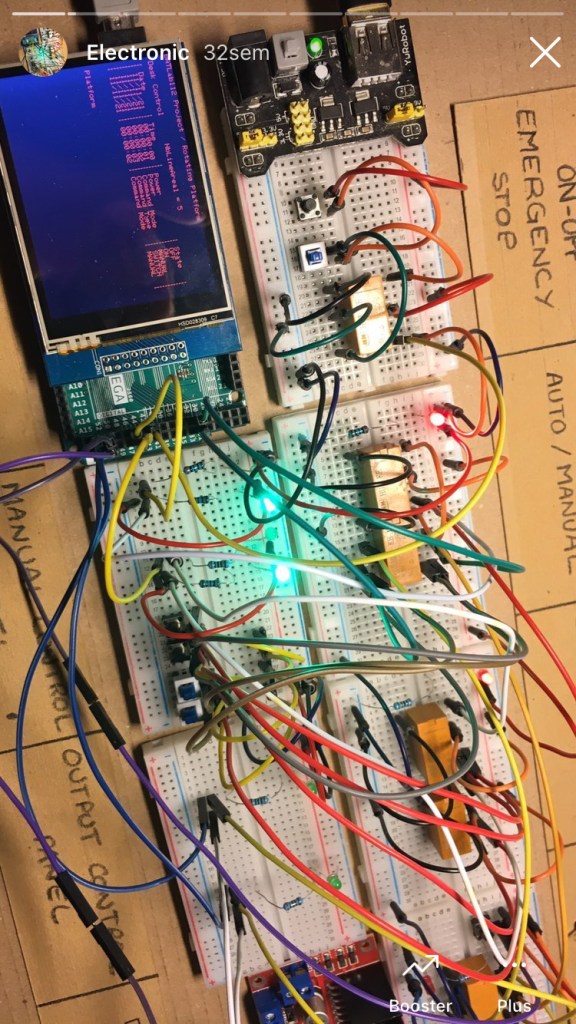
Maquette
Afin de valider ces choix, une maquette physique du circuit a été réalisée. Le câblage sur plaque expérimentale (protoboard) a permis :
de vérifier la cohérence des connexions ;
de confirmer la compatibilité électrique entre les éléments ;
d’effectuer une série de tests fonctionnels (mise sous tension, bascules de modes, commandes moteurs).
Cette démarche de prototypage intermédiaire est conforme aux bonnes pratiques de l’ingénierie électronique, permettant de déceler d’éventuelles incohérences avant la production d’un circuit imprimé ou l’intégration dans l’environnement mécanique définitif.
Test de fonctionnement
Cartes électroniques
Conclusion
Cette première itération électronique de la console de commande du diorama BATLab112 constitue une étape structurante du projet. Elle permet de valider l’ensemble des fonctions de base : gestion de la mise sous tension, sélection des différents modes de commande, pilotage du moteur de la plateforme rotative et évaluation de l’ergonomie opérateur.
L’architecture modulaire mise en place offre une marge significative pour les développements ultérieurs, notamment :
l’intégration d’un système de contrôle automatisé basé sur Arduino ou équivalent,
la mise en place d’un affichage en temps réel via un écran TFT 2,8’’,
la migration vers un câblage définitif en adéquation avec les contraintes mécaniques du diorama.
En ce sens, ce prototype représente un jalon essentiel dans la transition entre la conception préliminaire et la validation fonctionnelle du dispositif final, illustrant une démarche académique structurée et reproductible.
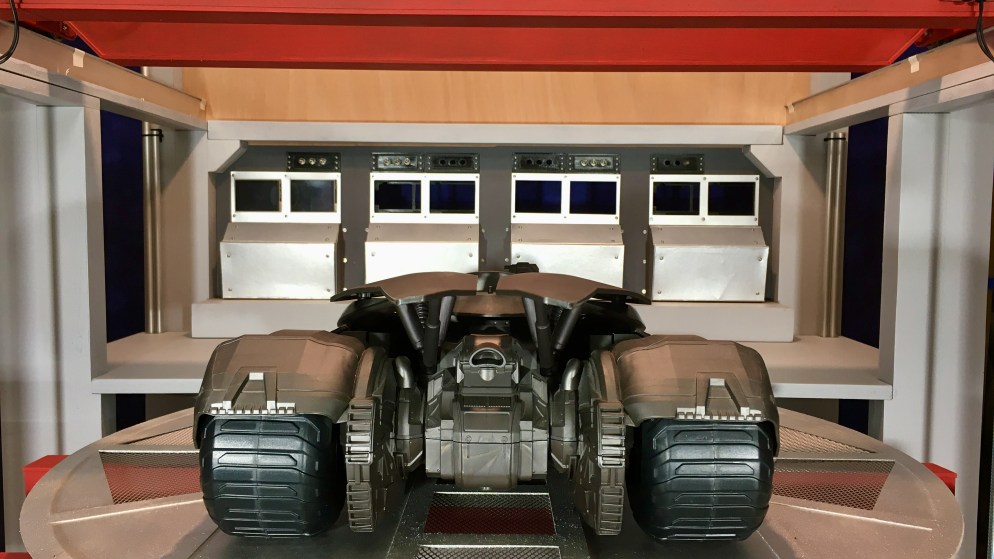
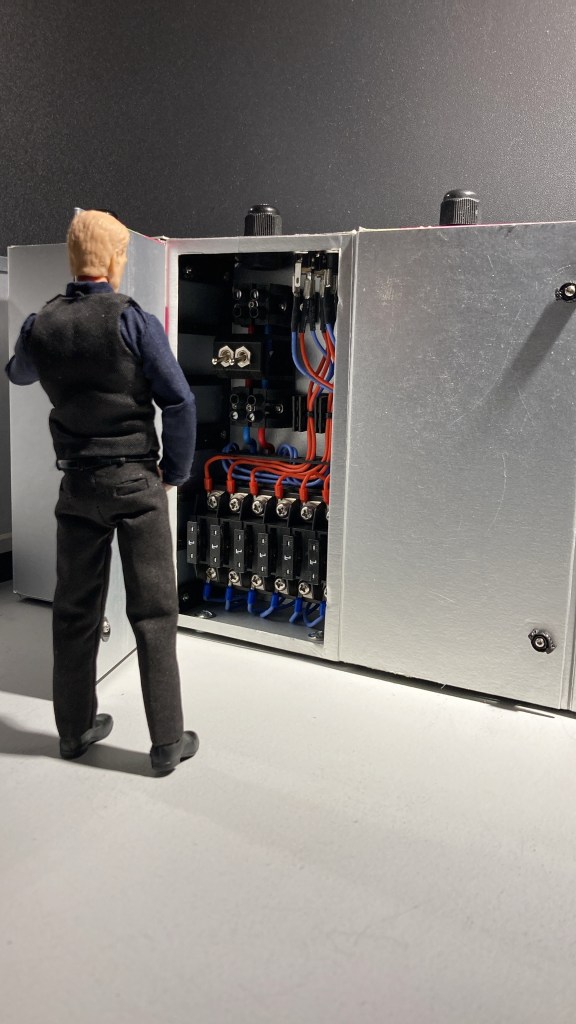
Depuis le point d'avancement précédent, l'intégration du pont élévateur et de la plateforme rotative de la Batmobile dans le diorama de la Batcave est à présent terminée. Après avoir été peint en couleur rouge « sécurité », le pont élévateur est équipé de son moteur et sa transmission de rotation ainsi que l'armoire électrique de raccordement. Le plateau et la structure de la plateforme rotative de la Batmobile sont peintes de couleur gris métallique.
La mise en scène de la figurine action de Batman et du modèle réduit de la Batmobile à l'échelle 1/12e permet de rendre compte de la cohérence d'échelle du diorama.
Le prochain point d'avancement présentera l'intégration finale du pont roulant bipoutre dans l'atelier automatisé de la Batcave.
English – This text is an automatic translation from French. If you see any possible improvements, say so in the comments.
From the previous progress point, the integration of the Batmobile lift and rotating platform into the Batcave diorama is now complete. After being painted in "safety" red, the lift is equipped with its motor and its rotation transmission as well as the electrical connection cabinet. The platform and the structure of the rotating platform of the Batmobile are painted in metallic gray color.
The staging of the Batman action figure and the 1/12th scale model of the Batmobile makes it possible to reflect the coherence of the scale of the diorama.
The next progress report will present the final integration of the double-girder overhead crane into the Batcave's automated workshop.
Spanish – Este texto es una traducción automática del francés. Si ve alguna posible mejora, dígalo en los comentarios.
Desde el punto de progreso anterior, la integración del elevador Batmobile y la plataforma giratoria en el diorama Batcave ahora está completa. Tras ser pintado en rojo "seguridad", el ascensor está equipado con su motor y su transmisión de giro así como el armario de conexiones eléctricas. La plataforma y la estructura de la plataforma giratoria del Batimóvil están pintadas en color gris metalizado.
La puesta en escena del figurín de Batman y la maqueta a escala 1/12 del Batimóvil permite reflejar la coherencia de la escala del diorama.
El próximo informe de progreso presentará la integración final de la grúa puente birraíl en el taller automatizado de Batcave.
Cet article présente la réalisation du modèle opérationnel de la structure du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
Ce modèle de la structure de l’atelier du diorama de la Batcave est réalisé à partir du prototype.
Le design des 4 piliers principaux est repris conformément à la conception préliminaire. Cette évolution du prototype permet de réduire très efficacement la transmission des vibrations tout en améliorant la rigidité de la structure principale. La plateforme du local électrique est présente sur le niveau le plus bas. L’ensemble est peint d’une couleur gris mat.
La réalisation du prototype du pont roulant bipoutre du diorama de la Batcave fait suite à la conception préliminaire de cet équipement. Voir l’article …
La structure du pont roulant est fabriquée en bois pour des raisons de facilité d’usinage, essentielle lors de cette phase de prototypage, et de maîtrise de l’impact environnementale du projet. Compte tenu des dimensions de certaines pièces constituant cet équipement, il n’était de toute façon pas envisageable de les imprimer avec une imprimante grand public. La perspective d’une fabrication en résine ou par impression professionnelle n’était pas non plus compatible avec le budget prévisionnel du projet.
Les pièces d’assemblage sont imprimées pour des raisons de faisabilité technique et de précision de fabrication. Les principaux sous-ensembles du pont roulant bipoutre sont assemblés par boulonnage (M2).
Les photos utilisées dans cet article ont été prises avant la phase de ponçage et de finition !
Vues de détails
Pièces en bois
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite fabriquées par le 8FABLAB à Crest dans la Drôme.
Pièces d’assemblages
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite imprimées par Benoit, membre de la communauté du projet BATLab112.
Platine d’assemblage poutre et sommier du pont roulant.
Deux platines d’assemblage sont collées à chaque extrémité des poutres. Ces trois pièces constituent un sous-ensemble. La platine permet le montage et démontage de ce sous-ensemble sur les sommiers du pont roulant par boulonnage.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un montage le plus ajusté possible.
Support de fixation des micros moteurs
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Sa forme permet de maintenir un micro moteur 6VDC. Un système de fixation supplémentaire reste à l’étude pour le moteur.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un maintien du moteur.
Plaque de protection
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Aucune contrainte particulière n’est requise pour la réalisation de cette pièce, destinée à protéger et maintenir en place l’axe de la roue libre.
Test fonctionnel
Cette vidéo a été réalisée en mode expérimentale, à partir d’une structure principale incomplète. Son objectif était de montrer le fonctionnement général du pont roulant bipoutre.
Validation du design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire
Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite aux contraintes d’assemblage rencontrées .
Prototype n°1
La fabrication des pièces principales en bois est satisfaisante même si leur poids reste important. Les différents éléments constituant les poutres du pont roulant ont été assemblés par collage. L’ensemble est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Validation du design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le point fonctionnel critique sur ce prototype est la liaison pivot des axes de rotation des roues. Il est impératifs que ces liaisons soit la plus fluide possible pour autoriser l’utilisation de micro moteur. Le poids non négligeable de la structure en bois étant déjà un handicap il est impératif de contrôler cette fonction.
Prototype n°1
L’essieu d’entrainement est réaliser à partir d’un axe en aluminium, des roulements à billes de guidage et une poulie à gorge en V pour la roue. L’essieu de roue libre est réalisé à partir d’un axe et d’une poulie à gorge en V.
Validation de la résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids des deux bras robotiques ainsi que du Trolley sur lequel ils sont fixés. Cependant, les bras robotiques étant en cours de fabrication ce test n’a pu être réalisé.
Toutefois ce test a mis en évidence la trop grande souplesse de la structure supportant les rails de guidage du pont roulant.
Test de la motorisation du système
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
Le couplage de l’axe des roues motrices avec les moteurs est assuré par un assemblage « en force » entre l’axe du moteur et l’axe de la roue.
La prochaine version de cette transmission devra assurer un couplage entre l’axe du moteur et celui de la roue plus durable.
Moteur
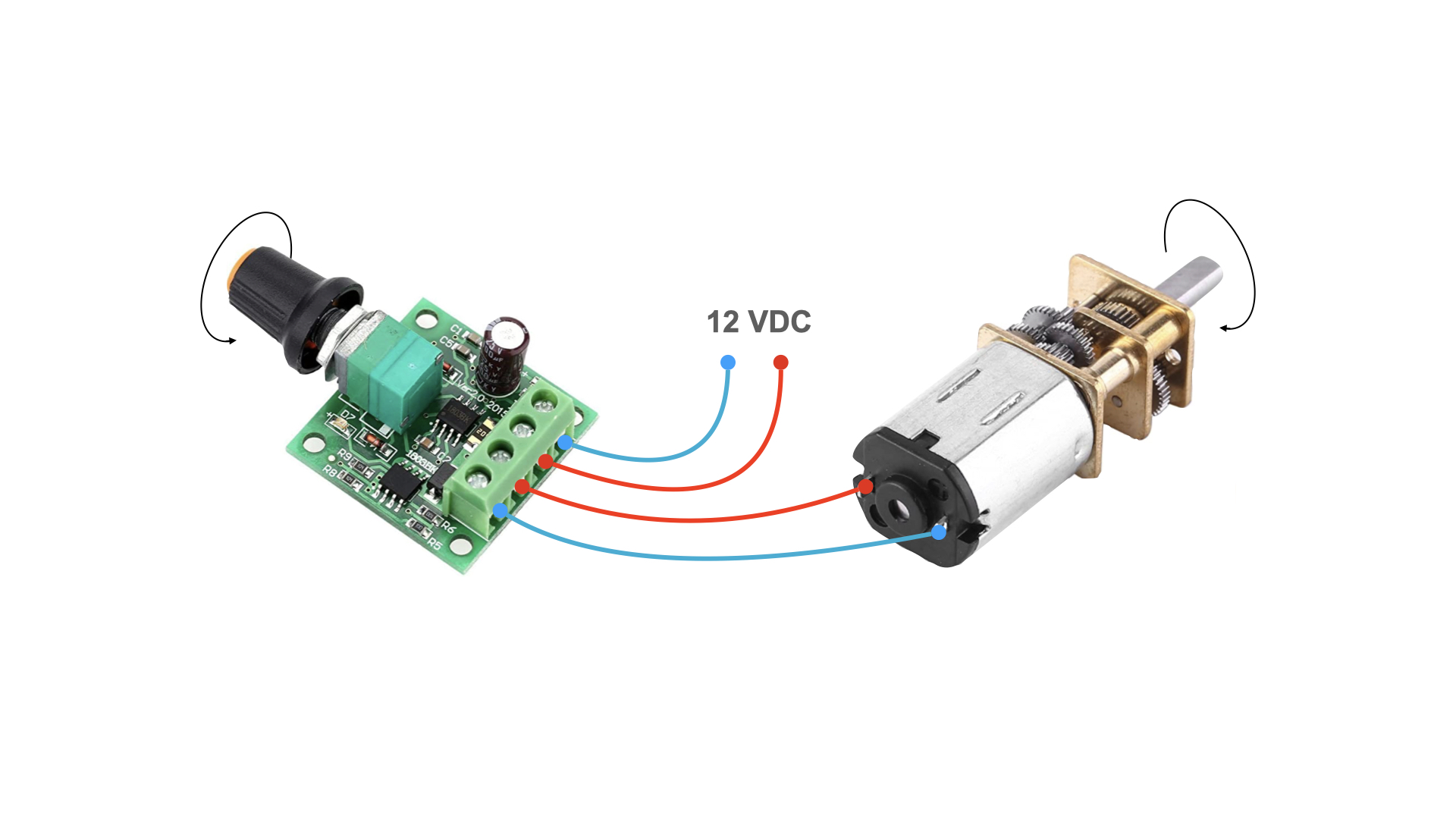
Ce test de motorisation a été réalisé avec deux micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler de manière identiques les tensions d’alimentation des moteurs et ainsi ajuster leurs vitesses de rotation à des valeurs identiques. Le couple de ces moteurs est suffisant pour entrainer l’ensemble ; pont roulant + charge. Le test de motorisation est donc validé.
Conclusion
Même si ces premiers tests ont été réalisés dans des conditions non optimales, ce premier prototype du pont roulant bipoutre équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Il est raisonnable de penser que le fonctionnement de cet équipement sera amélioré sur une structure complète et plus aboutie.
Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
Le pont élévateur est maintenant équipé de 4 axes verticaux assurant la transmission de la rotation des 4 moteurs à courant continu.
Les 4 axes de transmissions sont des tiges filetées de diamètre 8mm assemblées sur la structure via des roulements à billes de guidage. L’implantation des moteurs est provisoire tant que des tests fonctionnels n’auront pas été réalisés.