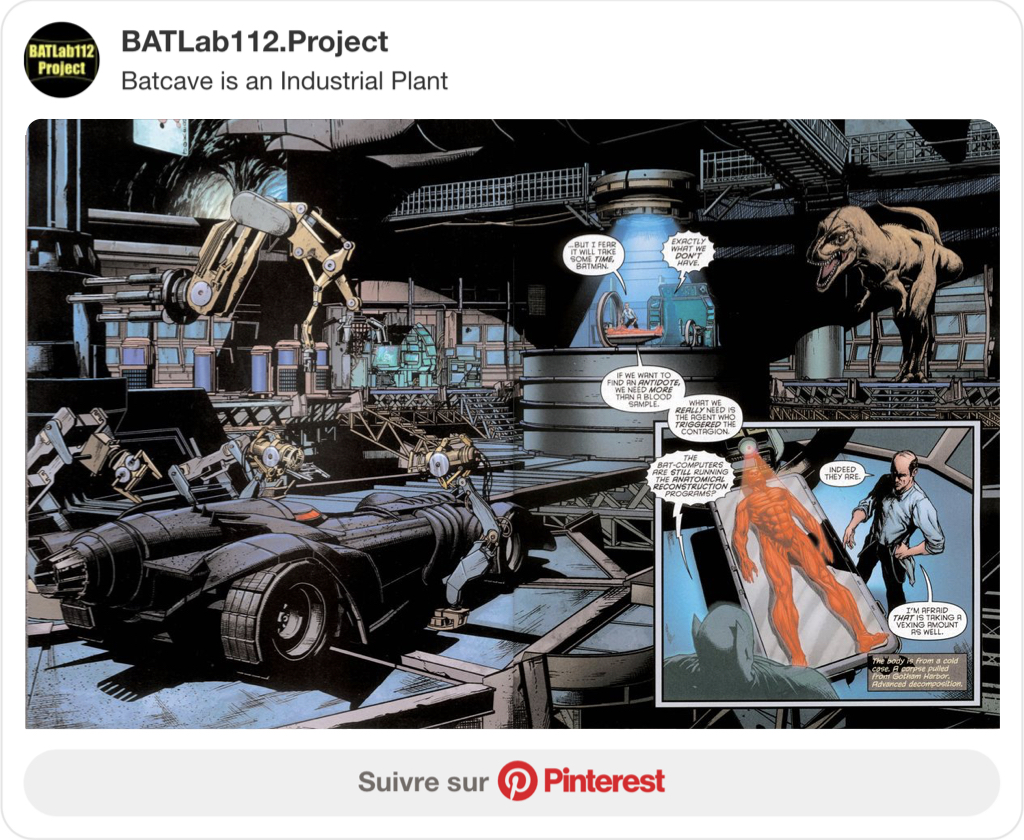
En rassemblant des technologies avancées, des équipements industriels et des dispositifs d’analyse dans un espace restreint, la Batcave apparaît comme un environnement technologique complet. Elle constitue à la fois une vitrine d’innovations et un site quasi-industriel où l’intégration, l’optimisation et l’interaction de systèmes complexes peuvent être observées dans un cadre narratif immersif.… Lire la suite…
Un espace où la technologie fonde l’identité du héros
L’un des traits distinctifs fondamentaux de Batman réside dans l’absence totale de pouvoirs surnaturels. Son efficacité repose exclusivement sur son intelligence, sa capacité d’analyse et l’usage stratégique de technologies de pointe rendues accessibles par ses ressources financières considérables. Dans ce contexte, la Batcave occupe une place centrale : loin d’être un simple repaire secret, elle constitue un environnement hautement technologique pensé pour soutenir l’action du justicier et amplifier ses capacités humaines.
L’élément emblématique de cet univers demeure le Batcomputer, véritable symbole de la supériorité technologique de Batman. Ses représentations fictionnelles évoluent au fil des époques, épousant les progrès réels de l’informatique, depuis les premiers systèmes de calcul jusqu’aux dispositifs d’intelligence artificielle avancée. Autour de cet équipement central se déploie un ensemble d’outils technologiques — drones, systèmes de surveillance automatisés, robots d’assistance — qui témoignent de l’actualisation constante du dispositif technique de la Batcave. L’ensemble forme un écosystème technologique dynamique, continuellement renouvelé pour rester en phase avec les avancées contemporaines. Ce caractère évolutif contribue à maintenir l’univers de Batman à la fois crédible, actuel et narrativement stimulant.
Une vitrine technologique et un laboratoire d’intégration
La concentration de technologies diverses au sein d’un même espace confère à la Batcave une dimension de véritable vitrine technologique. Chaque dispositif contribue à illustrer, sous une forme fictionnelle mais cohérente, un domaine particulier de l’innovation : informatique, robotique, systèmes embarqués, automatisation, communication, analyse de données, etc.
Cependant, la Batcave dépasse largement la fonction d’exposition. Elle constitue un environnement d’intégration où des technologies hétérogènes doivent coexister dans un milieu confiné, irrégulier et fortement contraint — celui d’une grotte naturelle. Les impératifs d’optimisation spatiale, d’ergonomie, de sécurité et d’efficacité opérationnelle imposent une ingénierie particulièrement sophistiquée. Cette configuration permet d’observer, même dans la fiction, les problématiques réelles que rencontrent les environnements techniques avancés : implantation des équipements, gestion énergétique, contrôle des systèmes, interactions homme–machine, compatibilité entre modules technologiques.
Un espace aux caractéristiques industrielles marquées
Au-delà des dispositifs informatiques et électroniques, la Batcave intègre également des équipements relevant de l’univers industriel. Les récits de Batman présentent ainsi des outils caractéristiques des ateliers de production ou des sites de maintenance : bras robotiques, plateformes tournantes, ponts roulants, stations de réparation et de diagnostic, infrastructures de levage ou de manutention. Ces dispositifs ne relèvent pas uniquement de l’imaginaire : ils répondent à des besoins fonctionnels liés à la construction, à la modification et à la maintenance de nombreux véhicules et équipements du héros.
À ce titre, la Batcave peut être appréhendée comme un véritable site industriel miniaturisé, où coexistent une pluralité de machines, d’outils et de systèmes autonomes dans un espace extrêmement restreint. Cette caractéristique accentue la complexité des interactions techniques et met en lumière les enjeux d’organisation, de synchronisation des activités et de gestion des risques.
Un décor ludique pour comprendre l’interaction des technologies
L’intérêt principal de la Batcave réside dès lors dans sa capacité à offrir, sous une forme narrative et ludique, une représentation densifiée de l’univers technologique contemporain. En concentrant dans un même lieu des technologies issues de domaines variés et en les insérant dans un environnement spatialement et physiquement contraint, la Batcave constitue un modèle pertinent pour appréhender les défis de l’ingénierie intégrée. Elle permet d’illustrer la complexité des chaînes technologiques, leurs interdépendances et les impératifs de performance globale qui en découlent.
En ce sens, la Batcave n’est pas seulement un décor emblématique : elle fonctionne comme un environnement technologique complet, où convergent innovation, ingénierie et mise en œuvre opérationnelle. Cet espace fictif offre ainsi un cadre particulièrement fécond pour réfléchir à l’articulation des technologies et à la manière dont elles cohabitent, se complètent et se renforcent mutuellement au service d’un objectif unique.
Sur la chaine YouTube du projet BATLab112, vous trouverez des vidéos et des shorts de l’avancement du projet, utilisées pour illustrer les pages du site batlab112.fr.
Dans la gestion de projets technologiques, la définition des besoins constitue une étape fondamentale. Elle requiert une analyse approfondie de l’environnement dans lequel s’inscrit le projet afin d’identifier et de comprendre les contraintes spécifiques liées à ce contexte. Dans le cadre du projet BATLab112, l’environnement naturel formé par la grotte abritant la Batcave et la colonie de chauves-souris qui l’occupe revêt une importance particulière, non seulement en tant qu’élément du mythe de Batman, mais aussi en tant qu’écosystème vivant devant être pris en considération dans toute démarche de conception.… Lire la suite →
La Batcave et la symbolique fondatrice de la chauve-souris
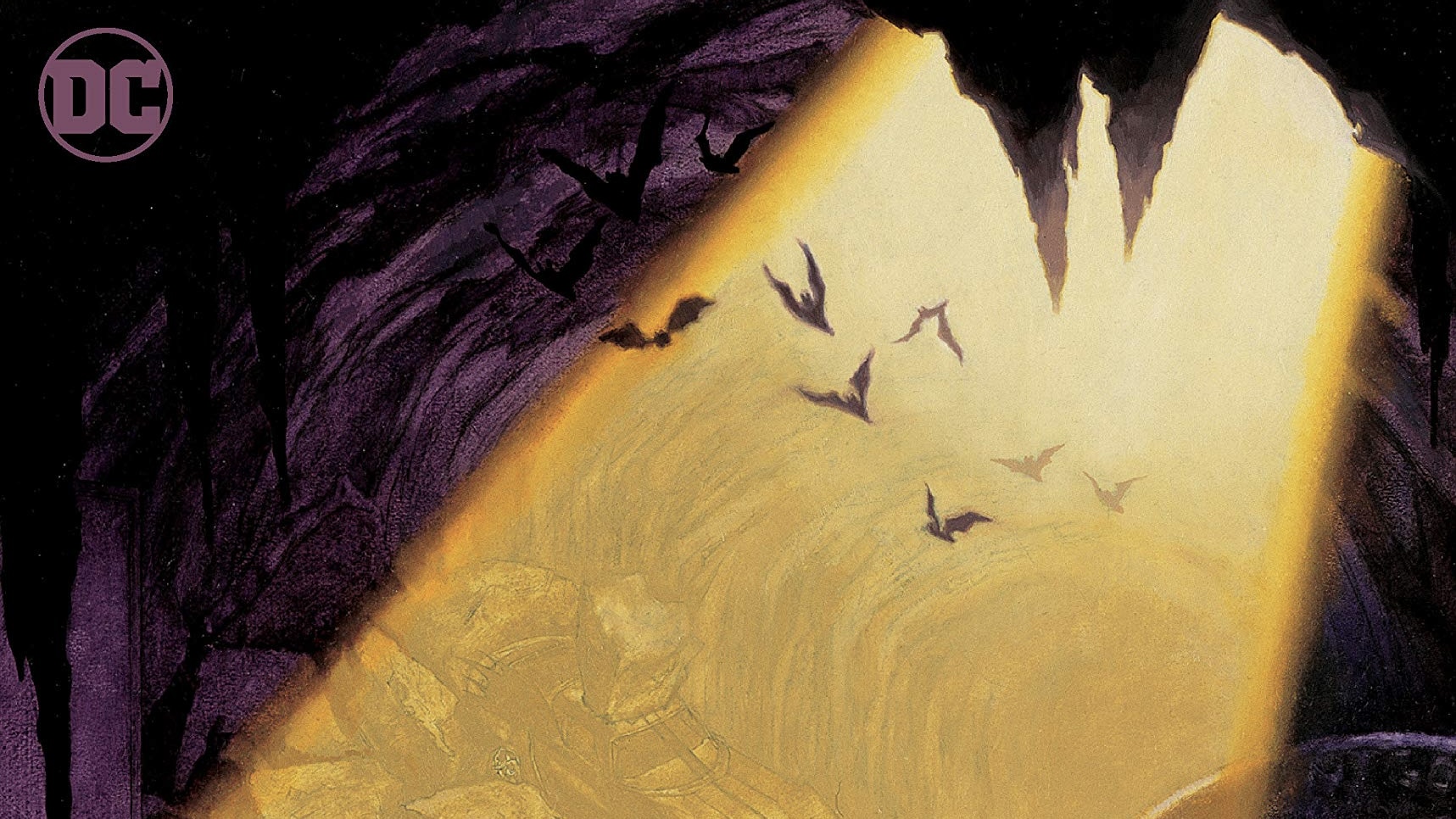
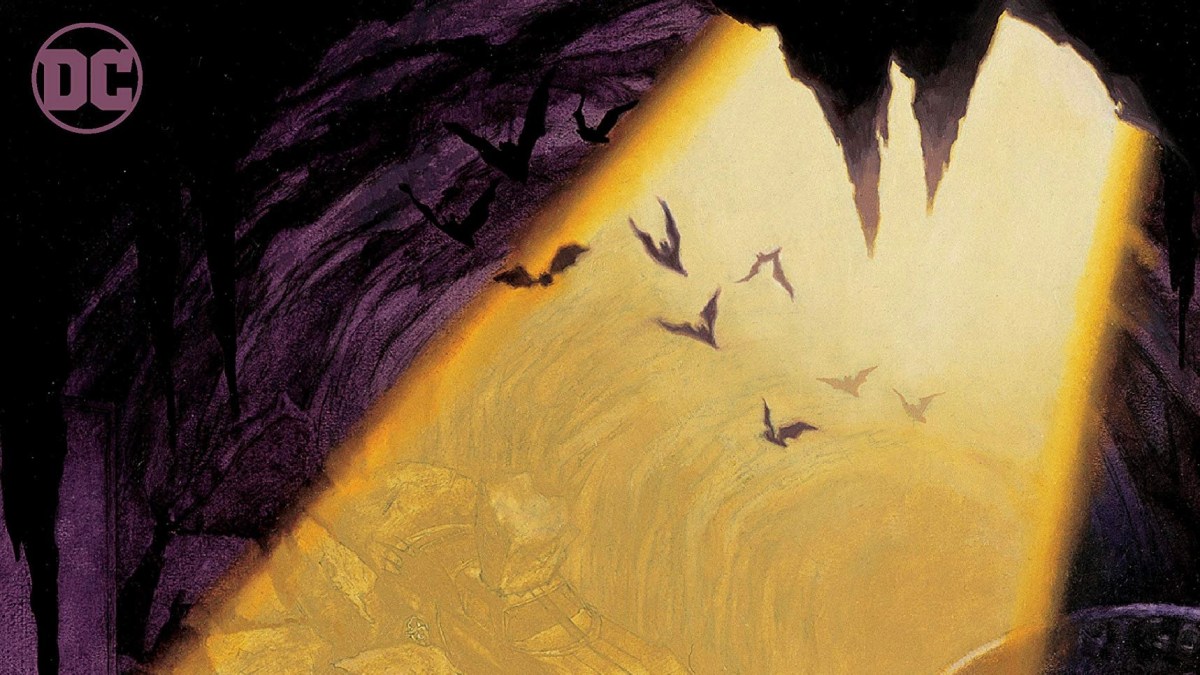
À partir de 1948, la Batcave est représentée comme une cavité naturelle située sous le manoir Wayne et habitée par une colonie de chauves-souris. C’est à la suite d’un épisode survenu dans le manoir, au cours duquel l’une de ces chauves-souris pénètre dans la demeure, que Bruce Wayne interprète cet événement comme un signe et décide d’adopter la chauve-souris comme emblème de son identité de justicier.
Mais au-delà du symbole qu’elles représentent, la présence de chauves-souris dans la Batcave est d’autant plus importante pour Batman qu’elles sont aussi des alliées très utiles, mobilisables grâce à un émetteur, dans des situations difficiles. L’effet de surprise et de peur, qui suivent leurs apparitions, crée une diversion qui permet à Batman de s’éclipser furtivement.
Batman: Year One – L’irruption d’une chauve-souris comme symbole révélateur
Cet animé issu de l’univers de fiction de Batman, et diffusé en 2012, retrace les débuts de la carrière de Bruce Wayne en tant que justicier masqué, parallèlement à l’ascension de Jim Gordon au sein du commissariat de Gotham. L’intrigue met particulièrement en lumière l’évolution psychologique de Bruce Wayne, qui, après avoir tenté de rendre la justice dans les rues en tant qu’individu anonyme, se retrouve gravement blessé et remet en question la légitimité de ses actions. Plongé dans un profond désarroi, il revit le traumatisme lié à la mort de ses parents. C’est dans ce contexte de vulnérabilité émotionnelle qu’une chauve-souris fait irruption de manière inattendue dans le manoir familial, se posant face à lui et symbolisant le tournant décisif de sa vocation en tant que protecteur de Gotham.
L’irruption de la chauve-souris constitue un élément catalyseur dans la trajectoire de Bruce Wayne, agissant à la fois comme un symbole de peur et d’inspiration. Face à cette apparition, il prend conscience de la nécessité d’adopter une identité capable de canaliser sa détermination et sa colère tout en instillant la crainte parmi les criminels. Cette prise de conscience marque le point de départ de sa transformation en Batman, justicier nocturne opérant dans l’ombre. L’épisode souligne également l’articulation entre le trauma personnel et la construction de l’identité héroïque : la peur et le deuil, loin de paralyser Bruce Wayne, deviennent des moteurs de sa volonté de protéger Gotham, conférant à son futur rôle une dimension à la fois psychologique et symbolique essentielle à sa légitimité en tant que défenseur de la ville.
Le retour symbolique des chauves-souris dans la Batcave – La Cour des Hiboux
Dans cet arc narratif des comics consacrés à Batman, le protagoniste est confronté à une série de meurtres apparemment inexpliqués qui l’entraînent dans une enquête complexe visant à identifier un assassin énigmatique, reconnaissable à son apparence évoquant un hibou. L’investigation révèle progressivement que la prochaine victime désignée par ce meurtrier n’est autre que Bruce Wayne lui-même, plaçant ainsi Batman face à une menace directe visant son identité civile.
Au fil de ses recherches, Batman met au jour l’un des mythes urbains les plus anciens de Gotham City, longtemps considéré comme une simple légende : l’existence réelle d’une organisation secrète et influente, connue sous le nom de la Cour des Hiboux. Cette société occulte, enracinée dans l’histoire même de la ville, apparaît comme détentrice de secrets profondément inquiétants et exerce une emprise clandestine sur Gotham depuis des générations.
Parvenant dans un premier temps à déjouer les manœuvres de la Cour, Batman suscite la riposte de l’organisation, qui lance une offensive massive contre lui en déployant une armée d’assassins jusque dans la Batcave. Grâce au soutien logistique et stratégique d’Alfred, Batman réussit néanmoins à neutraliser ses assaillants. La conclusion de cet affrontement revêt une forte dimension symbolique : le retour des chauves-souris dans la Batcave marque la défaite des Hiboux et consacre la victoire de Batman sur cette menace ancestrale.
Entre mythe et réalité biologique – Contraintes d’un espace iconique
Si en 1948, les activités de Batman dans ce milieu naturel ne suscitait pas de question, dans l’approche contemporaine et plus réaliste imposée par la méthode de gestion du projet BATLab112, cet environnement est un élément déterminant. Ainsi, les impacts d’une activité humaine dans la Batcave sont à prendre en compte pour préserver la présence de ces chiroptères faisant partie intégrante du mythe de Batman. Car si les chauves-souris ne sont pas dérangées par la seule présence de l’homme, elles le sont par les conséquences de son activité.
Les effets de l’éclairage artificiel
L’intégration de l’éclairage est indispensable pour rendre un espace souterrain praticable. Cependant, l’éclairage artificiel modifie les cycles lumineux naturels, ce qui peut perturber les rythmes biologiques des chauves-souris. Des études indiquent que les chiroptères tendent à éviter les zones éclairées et que l’intensité ainsi que la nature du spectre lumineux influencent leurs réponses comportementales. Par conséquent, il est souhaitable de limiter la pollution lumineuse en orientant préférentiellement l’éclairage vers les zones nécessaires à l’activité humaine tout en évitant la diffusion large, et en privilégiant des solutions indirectes adaptées.
Les contraintes acoustiques
Les activités humaines génèrent inévitablement des émissions sonores. Dans le cas étudié, l’usage d’outils, de dispositifs mécaniques ou de moteurs peut produire des niveaux sonores élevés susceptibles d’affecter négativement la colonie de chauves-souris. Comme chez la plupart des animaux sauvages, des bruits soudains ou intenses peuvent provoquer un comportement de fuite. Ainsi, la conception spatiale doit intégrer des mesures de réduction et de confinement acoustique, de manière à limiter l’exposition des chiroptères aux nuisances sonores tout en préservant leur liberté de circulation.
L’étude des effets des technologies employées met en évidence des enjeux supplémentaires liés à l’intégration d’équipements motorisés, notamment la Batmobile. L’utilisation d’un réacteur à propulsion dans un milieu confiné soulève plusieurs problèmes : niveaux sonores élevés, émission de chaleur susceptible de déséquilibrer l’écosystème thermique de la grotte, et production de dioxyde de carbone pouvant altérer la composition de l’air. Ces facteurs exigent une réflexion approfondie afin de développer des solutions alternatives ou complémentaires, telles que des motorisations électriques permettant des déplacements silencieux et sans émissions directes, tout en répondant aux impératifs de discrétion et de sécurité.
Conclusion
L’analyse de l’environnement iconique du projet BATLab112 illustre l’importance de prendre en compte, dès les premières phases de conception, les interactions entre l’activité humaine et les composants naturels d’un contexte donné. Au-delà des considérations esthétiques ou symboliques, des facteurs tels que l’éclairage, l’acoustique et les impacts des technologies employées doivent être intégrés de manière systématique. Cette approche permet non seulement de répondre aux besoins fonctionnels, mais aussi de garantir la durabilité et la cohérence écologique de l’intervention, même dans un cadre fictionnel.
L’aménagement de la Batcave du projet BATLab112 doit proposer une architecture assurant la pérennité de la colonie de Chauves-souris dans la Batcave. Cette architecture doit notamment permettre de contenir les émissions sonores issues des activités de Bruce Wayne et Alfred Pennyworth et autoriser l’utilisation d’éclairage. Ces contraintes imposent donc une architecture conçues à base d’espaces clos mais sans pour autant nuire à la libre circulation des chiroptères.
Enjeux techniques et environnementaux de la Batmobile dans l’environnement souterrain confiné de la Batcave
Le réacteur de propulsion de la Batmobile : atouts opérationnels et limites contextuelles
L’une des caractéristiques récurrentes de la Batmobile, attestée dès 1966, réside dans l’intégration d’un grand nombre d’équipements et de dispositifs technologiques. Parmi ceux-ci, un élément s’est progressivement imposé comme une signature emblématique du véhicule : le réacteur arrière, destiné à assurer une propulsion à très grande vitesse. Cet équipement constitue un avantage déterminant dans le cadre de déplacements longue distance ou de poursuites à haute intensité, en permettant à la Batmobile d’atteindre des vitesses de pointe élevées malgré une masse importante, résultant notamment de la présence de blindages et de systèmes embarqués complexes. Toutefois, l’emploi d’un tel mode de propulsion pour les phases d’entrée et de sortie de la Batcave apparaît inadapté, tant au regard des contraintes spatiales de l’environnement souterrain que des impacts potentiels associés à ce type de motorisation.
Contraintes acoustiques liées à l’utilisation du réacteur de la Batmobile en milieu souterrain
La turbine d’un réacteur génère des émissions sonores de très forte intensité, dont le niveau peut atteindre des valeurs de l’ordre de 150 dB. L’émission de telles ondes acoustiques dans un environnement souterrain confiné, tel que la Batcave, induirait des phénomènes de réverbération et de résonance particulièrement marqués. Ces effets acoustiques seraient susceptibles de perturber gravement la colonie de chauves-souris présente, dont les comportements reposent en grande partie sur l’écholocation. Par ailleurs, la répétition de sollicitations acoustiques de forte amplitude pourrait, à plus long terme, contribuer à une fragilisation de la structure géologique de la cavité, en raison des contraintes vibratoires exercées sur le milieu rocheux.
Impacts thermiques de la propulsion par réacteur de la Batmobile dans un environnement confiné
Par ailleurs, le dégagement thermique particulièrement élevé associé au fonctionnement d’un tel dispositif de propulsion présenterait des risques significatifs au contact d’éléments organiques, qu’il s’agisse de la végétation, de la faune cavernicole, notamment les chauves-souris, ou des occupants humains de la Batcave. Au-delà de ces risques immédiats, une dissipation d’énergie thermique répétée et régulière, correspondant à la fréquence des phases d’entrée et de sortie de la Batmobile, entraînerait une élévation notable de la température moyenne de la cavité. Une telle modification des conditions thermiques pourrait alors provoquer un déséquilibre profond des équilibres physico-chimiques de l’environnement souterrain, compromettant la stabilité de l’écosystème de la grotte.
Conséquences des émissions de CO₂ de la Batmobile sur la qualité de l’air de la Batcave
Enfin, en ce qui concerne les émissions de dioxyde de carbone, un réacteur constitue un système de conversion énergétique transformant l’énergie chimique contenue dans un carburant, généralement le kérosène, combinée à un comburant tel que l’air ambiant, en énergie cinétique destinée à produire une force de propulsion. Ce processus de combustion s’accompagne inévitablement de rejets de dioxyde de carbone (CO₂). Dans un environnement confiné tel qu’une grotte, l’accumulation de ces émissions serait susceptible de modifier significativement la composition chimique de l’atmosphère intérieure. Une telle altération pourrait, à terme, compromettre la qualité de l’air et rendre celui-ci impropre à la respiration humaine, tout en affectant plus largement l’équilibre de l’écosystème cavernicole.
Synthèse des limites opérationnelles d’une propulsion unique pour la Batmobile
La présente analyse ne remet pas en cause la pertinence de l’intégration d’un réacteur de propulsion sur la Batmobile, lequel demeure un élément central de ses capacités opérationnelles. Elle vise en revanche à mettre en évidence le fait que ce dispositif constitue, dans la majorité des représentations, l’unique mode de propulsion du véhicule, alors même qu’il présente des limitations significatives dans certains contextes d’utilisation. En particulier, les contraintes acoustiques, thermiques et atmosphériques précédemment identifiées démontrent que l’usage d’un réacteur n’est pas compatible avec les phases d’entrée et de sortie de la Batcave. Il apparaît dès lors nécessaire d’envisager un mode de propulsion complémentaire, spécifiquement adapté aux exigences de discrétion, de sécurité et d’absence d’émissions, propres à un environnement souterrain confiné.
Vers une motorisation alternative de la Batmobile adaptée aux contraintes de la Batcave
Les limites identifiées liées à l’usage exclusif d’une propulsion par réacteur au sein d’un environnement souterrain confiné conduisent à envisager l’intégration d’un mode de propulsion alternatif pour la Batmobile, spécifiquement adapté aux phases d’entrée, de sortie et de circulation interne dans la Batcave. À cet égard, les évolutions récentes observées dans le secteur des véhicules industriels lourds apportent des éléments de réponse crédibles. Les motorisations électriques associées à des systèmes de batteries de forte capacité démontrent désormais leur aptitude à déplacer des masses supérieures à quatre tonnes, tout en offrant des autonomies dépassant 800 kilomètres à des vitesses compatibles avec les besoins opérationnels du véhicule.
L’adoption d’une propulsion électrique complémentaire permettrait ainsi de répondre simultanément aux exigences de discrétion acoustique, de maîtrise thermique et d’absence d’émissions de dioxyde de carbone, essentielles à la préservation de l’écosystème cavernicole et à la sécurité des occupants de la Batcave. Une telle configuration hybride, combinant propulsion électrique pour les environnements confinés et réacteur pour les phases de projection rapide et de poursuite à haute intensité, renforcerait la cohérence technique et environnementale de la Batmobile, tout en maintenant l’intégralité de ses capacités opérationnelles.
Motorisation électrique de la Batmobile : Conséquences pour la conception de l’atelier de la Batcave
En conclusion, l’intégration d’une motorisation électrique au sein de la Batmobile implique une adaptation fonctionnelle de l’atelier automatisé de la Batcave. Celui-ci doit être en mesure de prendre en charge l’ensemble des opérations spécifiques associées à ce type de propulsion, notamment le remplacement rapide des batteries afin d’éviter les contraintes liées aux temps de recharge, ainsi que la recharge et la gestion de batteries de substitution. Ces exigences soulignent que l’évolution du système de propulsion de la Batmobile ne peut être envisagée indépendamment de l’infrastructure technique de la Batcave, laquelle doit être pensée comme un environnement pleinement compatible avec les technologies électriques avancées.
La suite des articles sur la définition des besoins du projet BATLab112
La phase d’élaboration du cahier des charges constitue une étape structurante dans tout projet d’ingénierie, en ce qu’elle formalise, de manière rigoureuse et explicite, l’ensemble…
Bien que l’échelle de réalisation du diorama soit déjà fixée, les variations dimensionnelles observées d’un modèle de Batmobile à l’autre imposent de définir des critères de sélection rigoureux. Le choix du modèle ne peut se limiter à des considérations esthétiques… Lire la suite →
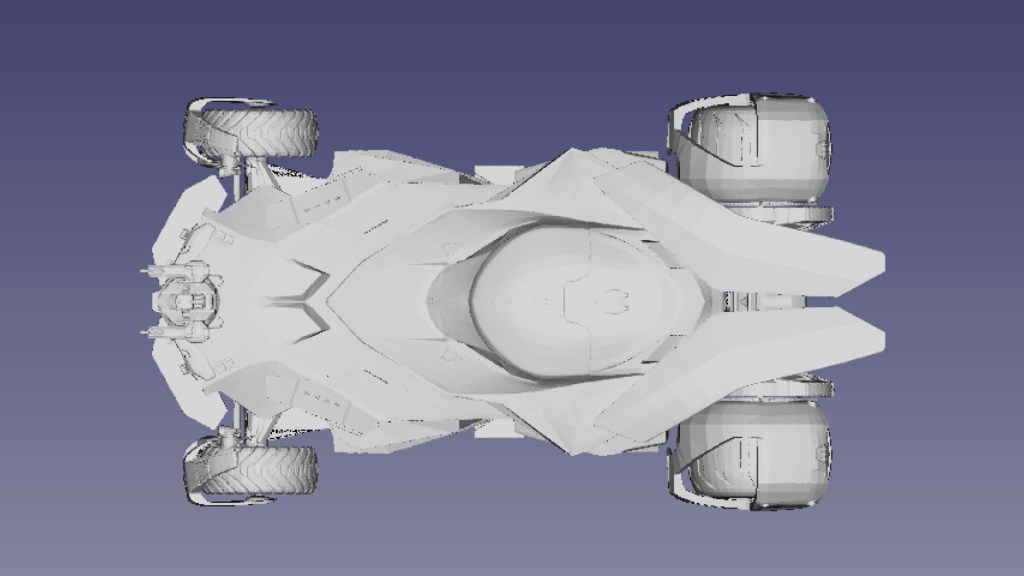
Si le projet BATLab112 se concentre principalement sur la Batcave, repère emblématique de Batman, l’intégration de la Batmobile dans le diorama constitue néanmoins un élément fondamental. Sa présence ne relève pas seulement de considérations esthétiques : elle conditionne la cohérence fonctionnelle de l’ensemble. En effet, les équipements industriels représentés — dispositifs d’entretien, de diagnostic ou de réparation — n’acquièrent pleinement leur sens qu’en relation directe avec le véhicule auquel ils sont destinés. Les caractéristiques dimensionnelles de la Batmobile deviennent ainsi un paramètre déterminant, guidant la conception, l’implantation et la mise à l’échelle de ces équipements au sein du diorama.
Définition des critères de sélection
Bien que l’échelle de réalisation du diorama soit déjà fixée, les variations dimensionnelles observées d’un modèle de Batmobile à l’autre imposent de définir des critères de sélection rigoureux. Le choix du modèle ne peut se limiter à des considérations esthétiques : il doit garantir une compatibilité précise entre les dimensions du véhicule et les trajectoires, dégagements et rayons de manœuvre des équipements industriels qui l’entourent.
Par ailleurs, ce choix doit s’appuyer sur la disponibilité de miniatures commercialisées à l’échelle retenue, dont la qualité de fabrication soit conforme aux exigences de réalisme du projet BATLab112. La possibilité d’accéder à un modèle numérique 3D constitue également un critère déterminant, dans la mesure où elle permet d’accélérer la phase initiale de conception et d’intégrer rapidement le véhicule dans les études de volumes.
Enfin, afin d’assurer un niveau de réalisme élevé, le modèle sélectionné doit être issu d’une œuvre en live-action — films ou séries — garantissant l’existence de données techniques fiables et de nombreuses références visuelles. Ce choix facilite non seulement la vérification des proportions, mais contribue également à renforcer la cohérence esthétique et narrative du diorama, en l’ancrant dans une représentation authentifiée de l’univers de Batman.
Dimensions réelles des Batmobiles
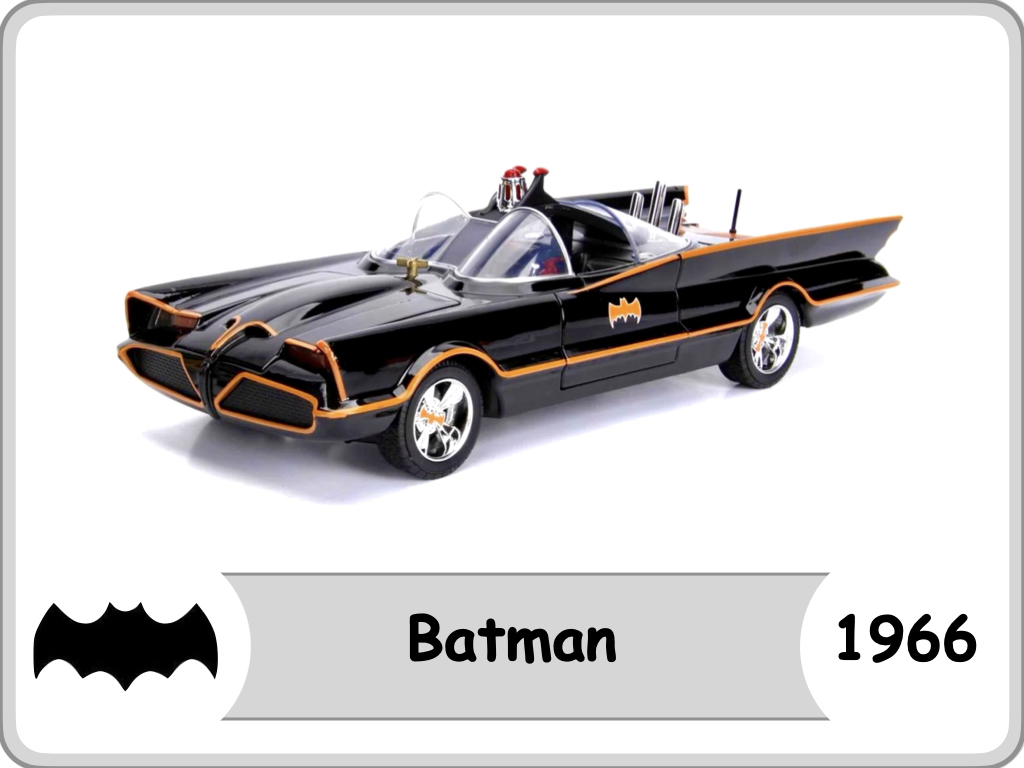
Les 6 modèles de Batmobile retenus sont tous issus des films en live-action les plus populaires.
Batman – 1966
Batmobile fabriquée à partir d’un concept-car Lincoln Futura unique de 1955 de Ford Motor Company
La carrosserie sculptée en mousse et fibre de verre est posée sur un châssis de Chevrolet Impala. Deux voitures au total ont été construites pour le film.
Le modèle de la Batmobile du film ‘ Batman & Robin ‘ de 1995 est de très loin le modèle le plus long puisque sa longueur de 10m est très supérieur à la moyenne, inférieure à 7m, soit un écart de plus de 47%.
La longueur du modèle de la Batmobile est le critère déterminant pour dimensionner le diamètre de la plateforme de stationnement. Cette plateforme ne doit pas être de dimension trop importante à l’échelle 1:12 pour respecter les objectifs de transportabilité du diorama final du projet BATLab112. Même si il semble difficile à atteindre, un objectif d’encombrement de 1000x1000mm est envisagé pour le diorama final. Ces côtes restent une référence dans la définition du modèle de la Batmobile du projet BATLab112.
La moyenne des longueurs est inférieure à 7m, qui correspond à l’échelle 1:12, à une longueur de 600mm. Un diamètre de la plateforme de stationnement de 600mm apparaît conforme avec les objectifs du projet même si cette côte est déjà supérieure à celle initialement prévue.
La longueur maximale est de 10m, qui correspond à l’échelle 1:12 à une longueur supérieure à 800mm. Envisager un modèle de batmobile de longueur supérieure à 800mm implique un diamètre du spot de stationnement de près de 1000mm, ce qui n’est pas conforme avec les objectifs de dimensions du diorama à l’échelle 1:12.
Détail série statistique : Largeur
Le modèle de la Batmobile du film Batman v Superman de 2016, est le modèle plus large, avec une largeur de 3,70m par rapport à une moyenne de 2,72m, soit un écart de 36%.
Une largeur moyenne de 2,72m, soit 227mm à l’échelle 1:12 et une largeur maximale de 3,70m soit 308mm sont des dimensions conformes avec les objectifs du projet.
Détail série statistique : Hauteur
Le modèle de la Batmobile du film ‘ Batman Begins ‘ de 2005, est le modèle le plus haut, avec une hauteur de 1,50m par rapport à une moyenne de 1,35m, soit un écart de 11%
Une hauteur moyenne de 1,35m, soit 112mm à l’échelle 1:12 et une hauteur maximale de 1,50m soit 125mm sont des dimensions conformes avec les objectifs du projet.
Détail Série statistique : Masse
Le modèle de la Batmobile du film Batman v Superman de 2016, est le modèle le plus lourd, avec une masse de 3200kg par rapport à une moyenne de 2500kg, soit un écart de 28%.
La masse du modèle de la Batmobile est le critère déterminant pour dimensionner les équipements de levage de la Batmobile. A ce stade de conception préliminaire du projet, le parangonnage des systèmes industriels existants montrent qu’il existe différentes solutions techniques de systèmes de levage d’une capacité maximale de 5000 kg. Cette valeur nous sert de référence dans la définition du modèle de la Batmobile du projet.
La moyenne des masses de la série est de 2500 kg avec une valeur maximale de 3200 kg. Ces valeurs sont tout à fait compatible avec la référence fixée.
Conclusion
Dimensionnement de la Batmobile
L’analyse des données statistiques des dimensions de différents modèles de Batmobile nous permet d’identifier les paramètres suivants pour le modèle de la Batmobile du projet BATLab112 :
Echelle 1:1
Echelle 1:12
Longueur
Environ 6m
500mm
Largeur
Inférieure à 4m
333mm
Hauteur
Inférieure à 1,50m
125mm
Masse
Inférieure à 4000kg
/
La Batmobile du projet BATLab112
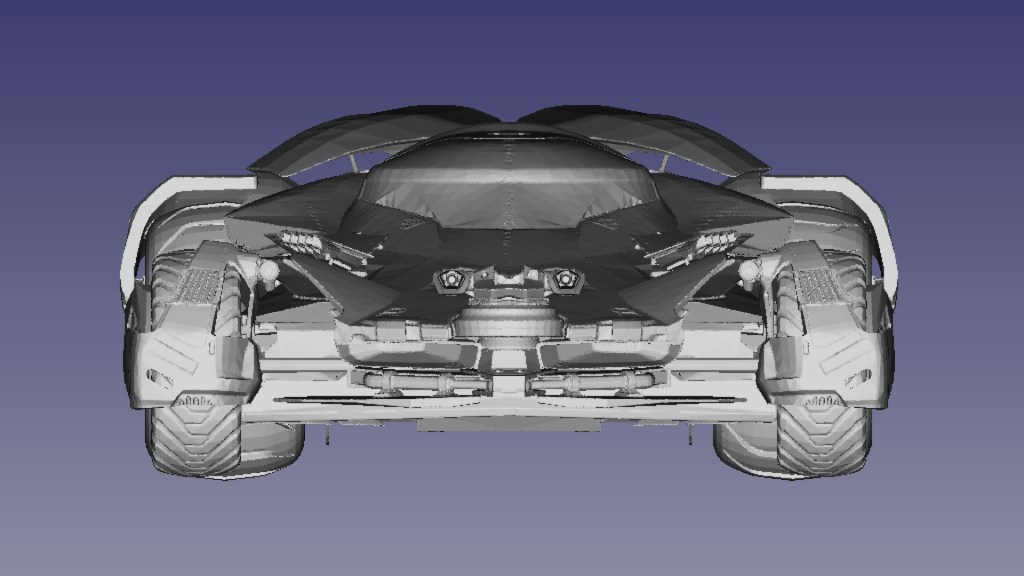
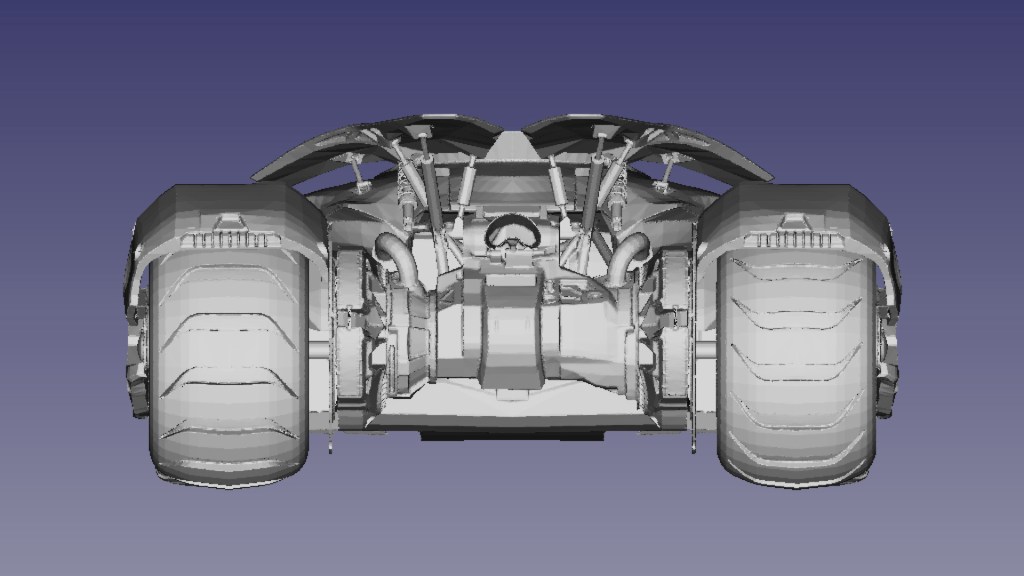
Le modèle de la Batmobile du film Batman v Superman de 2016, est le modèle dont les dimensions sont globalement les plus proches des dimensions retenues.
Le diamètre de la plateforme rotative de la Batcave du projet BATLab112 à l’échelle 1:1 de 7m, défini à partir de ce choix de Batmobile, autorise la présence des autres Batmobiles de 1966, 1989 et 2005.
Disponibilité du modèle numérique 3D
Le modèle 3D de la Batmobile utilisée a été réalisé par Vyom de la communauté du site https://GrabCAD.com
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Des modèles miniatures à l’échelle 1/12 de ce modèle de Batmobile existent, plutôt dans la version très similaire du film de 2021 ‘ Justice League’.
Ces modèles ne semblent plus proposés à la vente, du moins en France, mais sont apparemment disponibles sur le marché de l’occasion.
Mise à jour : La Batmobile du Film The Batman de 2022
Le modèle de la Batmobile du film The Batman de 2022 n’a pas été pris en compte lors de la première édition de cet article en 2020.
Malgré toutes les vidéos sur le making-off de la Batmobile il est très difficile de trouver les dimensions officielles de ce modèle.
Longueur
Largeur
Hauteur
Masse
4,30 m 2,20 m *** m *** kg
Compte tenu des dimensions estimées de la Batmobile du film The Batman de 2022, ce modèle est compatible, à l’échelle 1/12, avec le diorama de la Batcave du projet BATLab112.
La conception préliminaire de la console de commande fait suite à la phase d’étude préliminaire des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
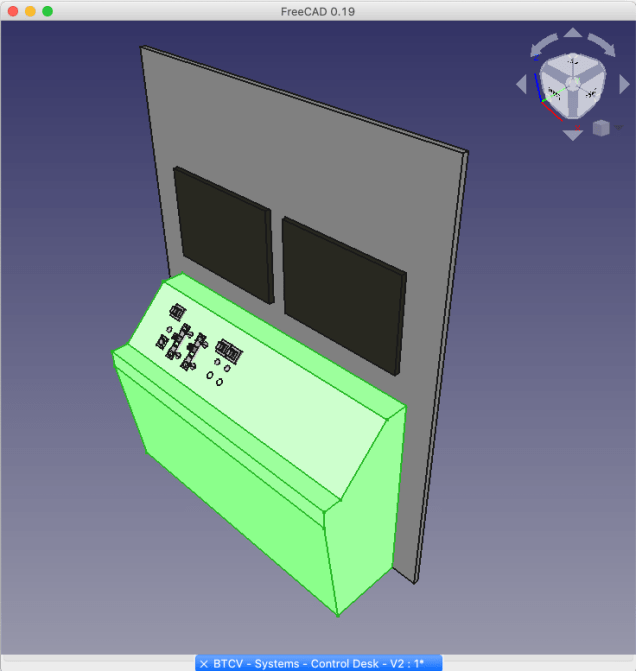
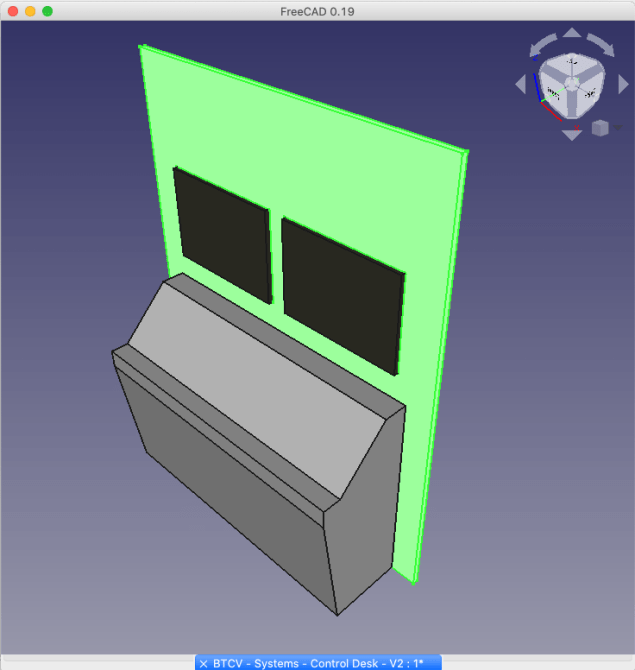
Vue générale
Le design retenu pour ce premier prototype, issu de la phase de benchmarking, est constitué de deux sous-ensembles : un pupitre et un panneau vertical.
Vues de détails
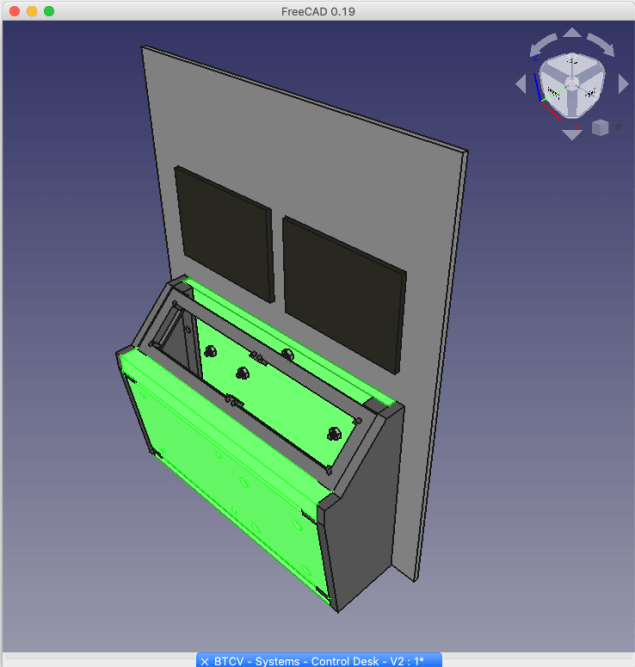
Pupitre
Le design du pupitre présente un panneau incliné pour supporter les commandes manuelles et un panneau avant légèrement incliné vers l’intérieur pour une meilleur approche de l’opérateur.
Panneau vertical
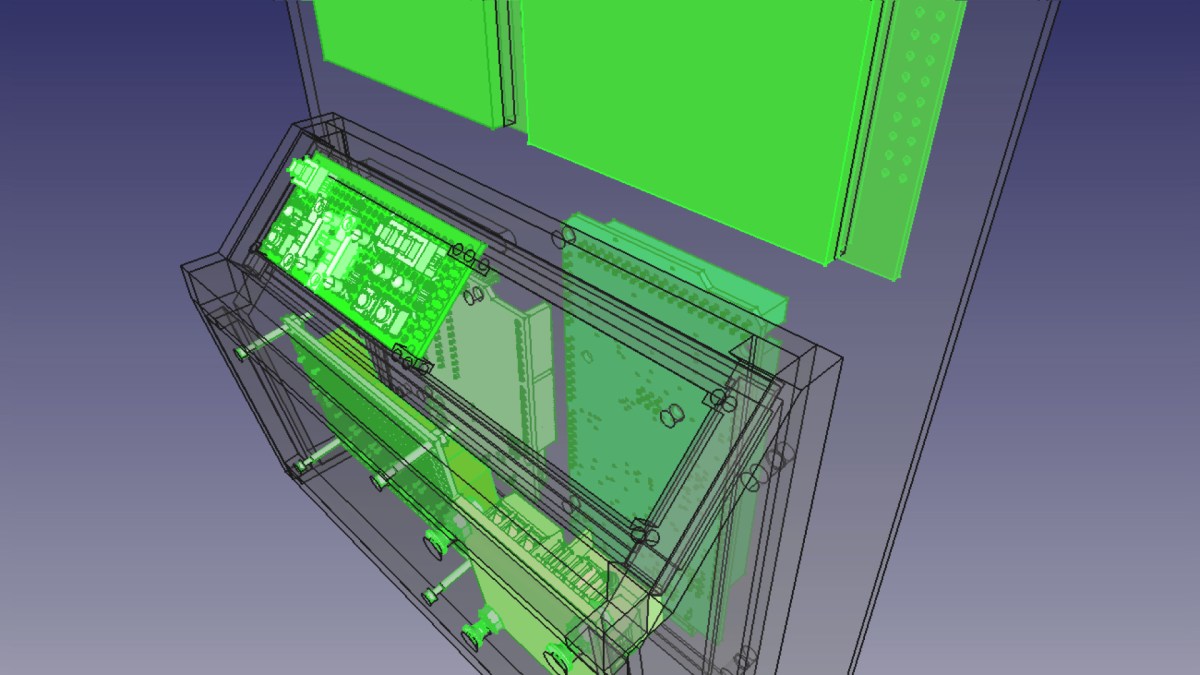
Le design panneau vertical est conçu pour intégrer deux écrans de contrôle et supporter deux cartes Arduino fixées à l’arrière.
Structure du pupitre
Screenshot n°1
Screenshot n°2
Screenshot n°3
Le design des deux pièces latérales (screenshot n°1) donne la forme générale au pupitre selon les critères retenues lors de la phase benchmarking. Compte-tenu de la complexité du design de ces pièces, elles seront réalisées par impression 3D.
Le design du cadre incliné (screenshot n°2) est conçu pour pouvoir fixer 2 PCB au format 20×80 mm, côte à côte. Cette pièce sera aussi réalisée par impression 3D pour des raisons de précisions de réalisation.
Les autres pièces (screenshot n°3) constituant le pupitre, seront réalisées en bois pour assurer la robustesse de l’ensemble et faciliter le travail de percage lors de la fabrication du prototype.
Modélisation 3D
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
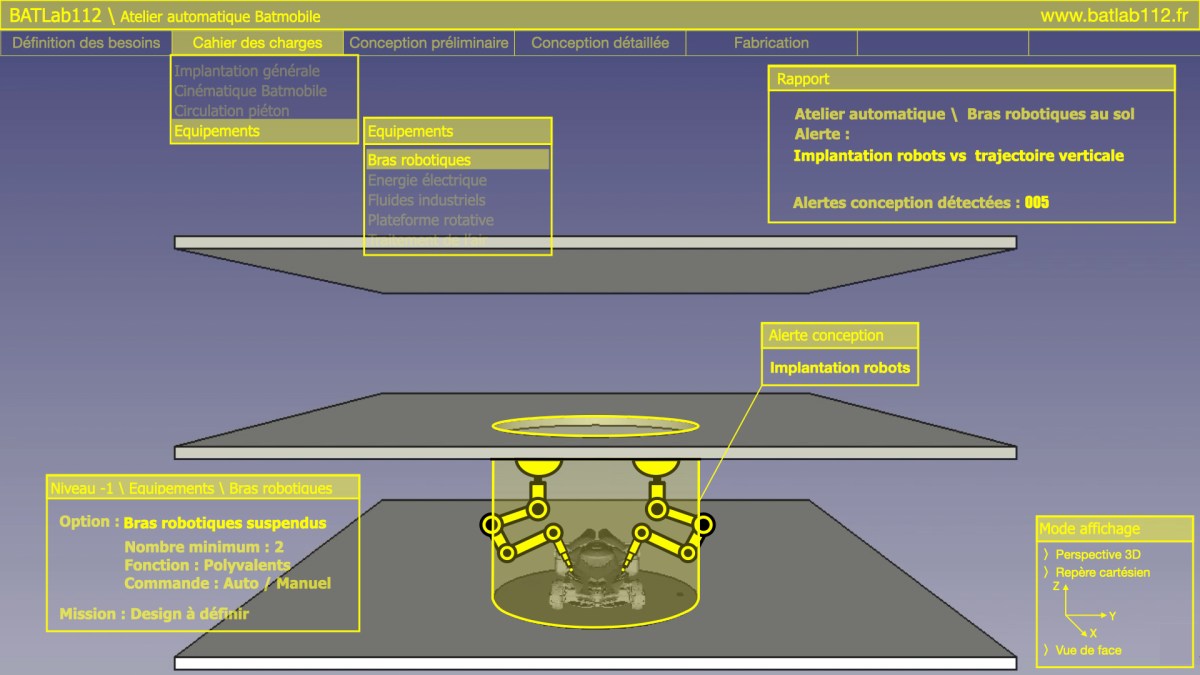
Cet article présente la réalisation de la version 1 de l’électronique de commande des bras robotiques équipant le diorama de la Batcave du projet BATLab112.
L’objectif opérationnel est de réaliser une maquette électronique assurant la commande en mode manuel et en mode automatique des bras robotisés équipant le diorama de la Batcave du projet BATLab112. Cette maquette doit permettre dans un premier temps, une commande des bras robotiques suivant trois modes de fonctionnement : Mode manuel, Mode automatique, Mode apprentissage.
L’objectif pédagogique consiste à se familiariser avec les principes de commande des servomoteurs.
Spécifications fonctionnelles
La sélection des différents mode de fonctionnement des bras robotiques par l’opérateur doit s’effectuer par des boutons poussoirs. Des voyants assurent la visualisation des états de fonctionnement.
Mode manuel
En mode manuel, les 2 bras robotiques sont commandés indépendamment. La commande des articulations est réalisée par l’intermédiaire de potentiomètres rotatifs. Cette commande doit s’effectuer en temps réel. La rotation de l’axe d’un potentiomètre doit entrainer la rotation de l’articulation correspondante.
Mode automatique
En mode automatique, les 2 bras robotisés sont commandés, indépendamment ou simultanément, suivant des consignes différentes. La commande des articulations est gérée par une unité de contrôle dans laquelle sont enregistrées l’ensemble des consignes nécessaires.
Mode apprentissage
En mode apprentissage, les 2 bras robotisés sont commandés indépendamment ou simultanément. L’enchainement des positions à apprendre pour chaque bras robotisé est défini par l’utilisation des commandes du mode manuel. La restitution de l’enchainement des positions enregistrées pour chaque bras est réalisée en mode automatique.
Spécifications techniques
Les actionneurs à commander
Chaque articulation des bras robotiques est équipée d’un servomoteur. Chaque bras est ainsi équipés de 4 servomoteurs.
Dans le cadre du projet BATLab112, les schéma électriques ou électroniques sont réalisés avec le logiciel KICAD. Vous pouvez télécharger le fichier du schéma de câblage au format PDF par le lien qui suit.
Le code présenté ici est une première approche pour mettre en oeuvre les fonctions nécessaires aux commandes des servomoteurs et valider le principe général de commande de la maquette. Ce code n’est donc pas optimisé.
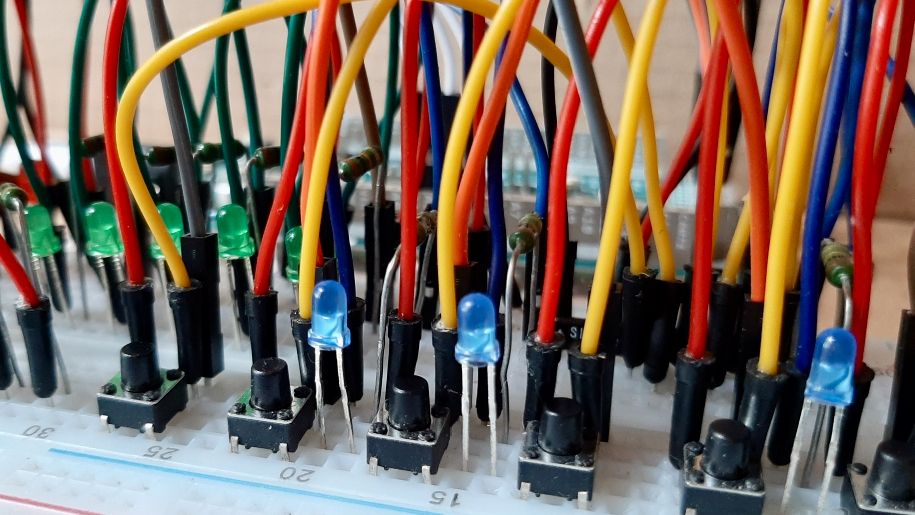
Cette maquette est réalisée pour les besoins de la validation technique et fonctionnelle de l’électronique de commande associée au code développé pour la carte Arduino Due qui pilote l’ensemble.
Cette maquette est réalisée avec des emballages de briques de jus de fruit. Cette matière légère, est suffisamment résistante pour supporter les assemblages nécessaires (ruban adhésif + boulon). Elle présente aussi une face dont l’état de surface est semblable à celui de l’aluminium, ce qui donne un rendu plutôt satisfaisant.
Cette maquette ne respecte pas fidèlement le design conçu en modélisation 3D et présente des défauts de fabrication qui induisent des perturbations dans les mouvements telles que des vibrations.
La vidéo du mode automatique
Conclusions
Electronique de commande
Ces tests permettent de valider le montage de l’électronique de commande des servomoteurs.
Trois points d’améliorations sont identifiés pour être intégrés dans les futures versions.
Point n°1 : Commandes manuelles
Constat : Les actions sur les potentiomètres de commande des servomoteurs impliquent l’usage d’un tournevis.
Evolution : Equiper les potentiomètres de boutons
Points n°2 : Enregistrement des positions en mode automatique
Constat : Les positions prédéfinies du mode automatique nécessitent la programmation de la Carte Arduino Due.
Evolution : Disposer d’un interface plus élaboré que des boutons poussoirs pour enregistrer ces positions sans avoir recours à la re-programmation systématique de la carte (exemples : clavier + écran ou écran tactile).
Points n°3 : Enregistrement des positions en mode apprentissage
Constat : Le nombre de positions disponible dans le mode apprentissage est limité à 5, ce qui est insuffisant pour envisager des enchaînement de trajectoires complexes.
Evolution : Disposer d’un interface plus élaboré que des boutons poussoirs et des Leds pour enregistrer ces positions (exemples : clavier + écran ou écran tactile).
Arduino Due + Code
Ces tests permettent de valider l’utilisation de la Carte Arduino Due et sa capacité à supporter le code nécessaire à la commande des servomoteurs.
Un point d’amélioration est identifié pour être intégré dans les futures versions.
Point n°4 : Codage de trajectoire plus fluide
Constat : Dans la démonstration réalisée en mode automatique les servomoteurs sont pilotés les uns après les autres pour atteindre chacune des positions. Cette méthode induit des mouvements lents et décomposés.
Evolution : Développer un pilotage simultané des servomoteurs pour obtenir des mouvement plus fluides et rapides
Servomoteurs
Ces tests permettent de valider l’utilisation de 3/4 servomoteurs comme actionneurs des articulations des bras robotisés. Une effet, le servomoteur utilisé pour l’articulation de l’épaule semble manqué par moment de couple. Cependant, compte tenu de la qualité de fabrication de la maquette qui n’est pas optimum il est difficile de conclure.
La conception préliminaire de la plateforme rotative fait suite à la phase d’étude des systèmes industriels existants. Voir l’article …
La conception préliminaire de la plateforme rotative est réalisée à partir des spécifications techniques et fonctionnelles du cahier des charges. Voir l’article …
Vue générale
Dimensionnement
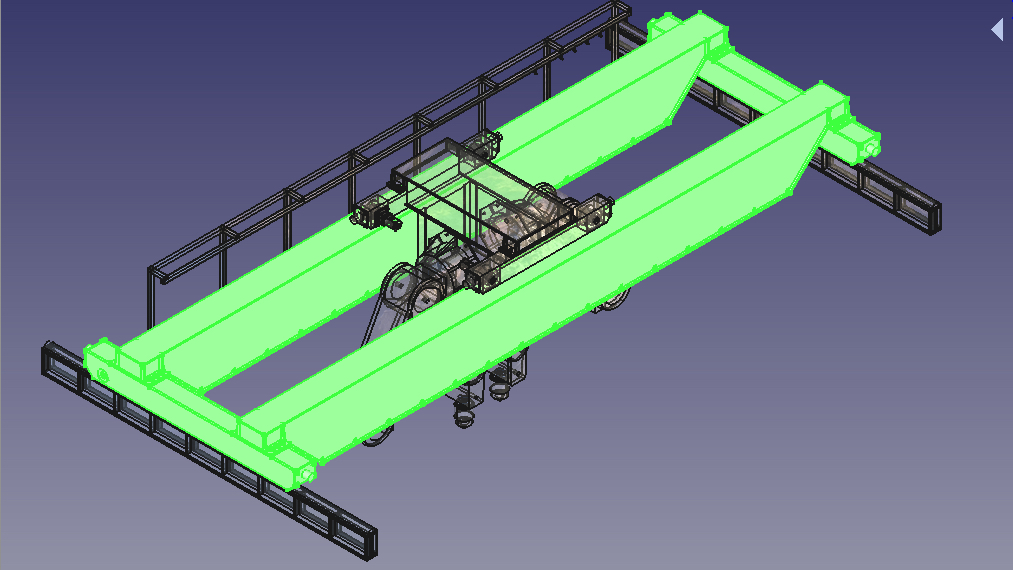
Pour dimensionner le pont roulant bipoutre suspendu, de l’atelier automatique de la Batcave du projet BATLab112, le bras robotique le plus puissant (et le plus lourd) du marché à l’heure où cet article est édité, est pris comme référence. Ces bras robotiques ont une masse totale de 22000 kg. A cela il faut encore ajouter la masse de la charge utile. Si les bras robotiques doivent pouvoir soulever la Batmobile dont la masse du modèle le plus lourd est de 3000 kg, nous obtenons une masse utile de 25000 kg. En prenant en compte un coefficient de sécurité et compte-tenu des « normes » en terme de capacité de levage constatée, le pont roulant bipoutre pris en référence pour le projet BATLab112 aura donc une capacité de levage d’environ 40 tonnes.
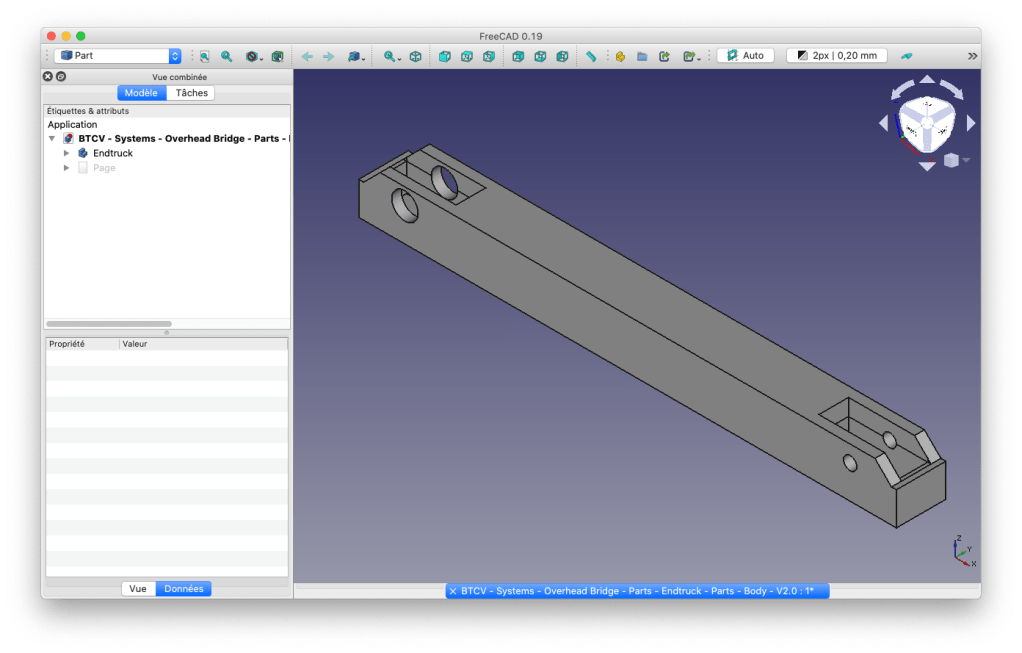
Ce premier design du sommier du pont roulant inclut déjà les empreintes des roulements à billes et des axes de rotation des roues. A ce stade de conception préliminaire, la faisabilité technique de fabrication de ce design n’a pas été évaluée.
Le design des poutres du pont roulant inclut les platines de fixation sur les sommiers.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
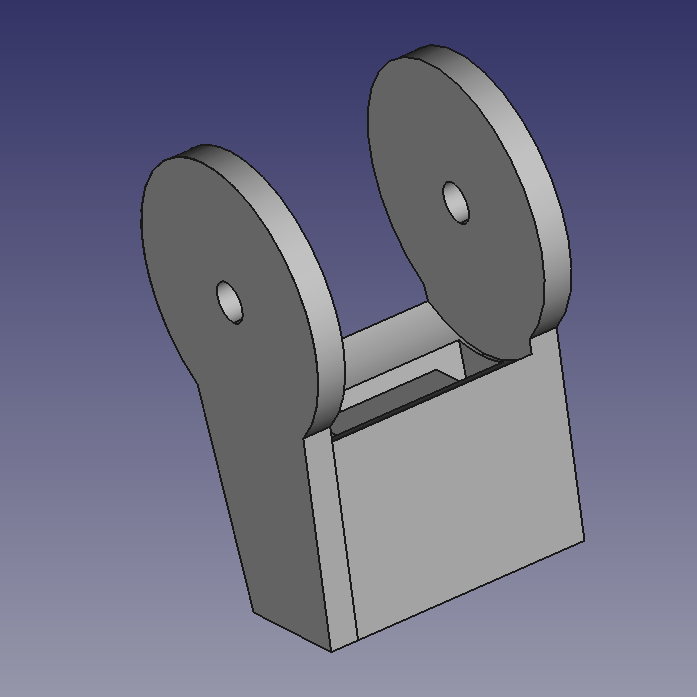
Les bras robotiques du projet BATLab112 sont entièrement conçus pour répondre aux exigences du projet. Même si il existe de nombreux modèles commerciaux de bras robotiques dits d’apprentissage, la taille de ces modèles n’est pas forcément compatible avec l’échelle de réalisation au 1:12 du projet et leur esthétique n’est jamais conforme à celle d’un robot industriel.
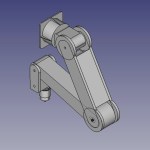
Les bras robotiques disposent de 4 degrés de liberté, autrement dit 4 articulations. Un moteur installé dans chaque articulation en assure la rotation.
Modélisation 3D
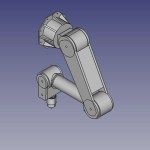
Evolution du design des versions des bras robotiques
Le design des bras robotiques est contraint par l’espace disponible dans l’atelier automatisé de la Batcave, notamment la hauteur sous plafond. A cette contrainte s’ajoute la contrainte de pouvoir accéder à tous les points de la surface de la Batmobile.
FreeCAD
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
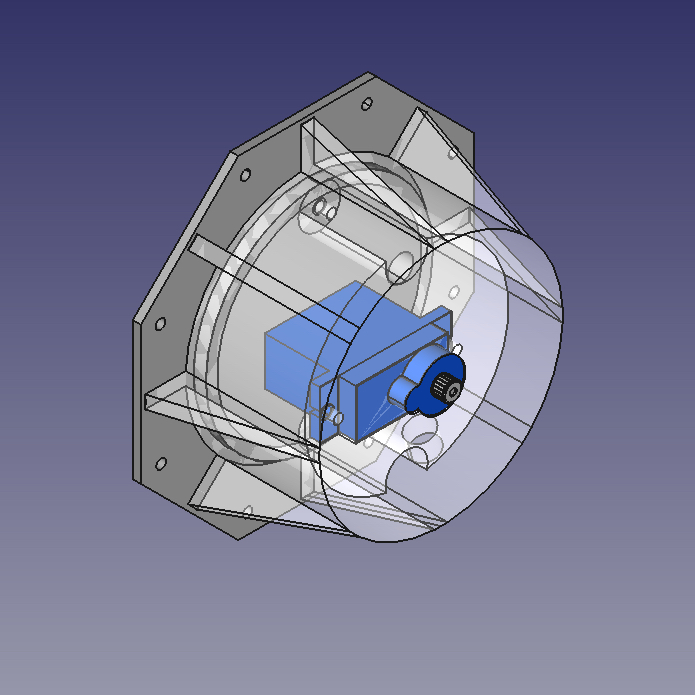
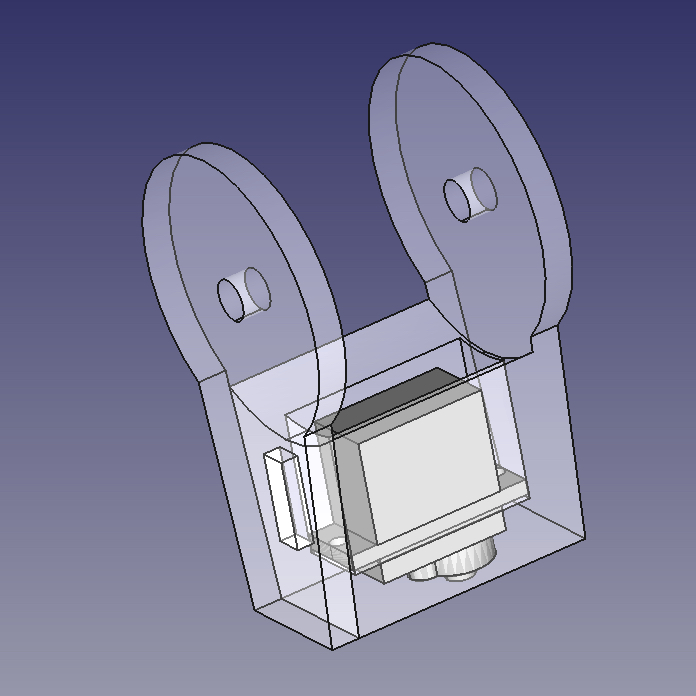
La base est la pièce qui assure la fixation du bras robotique sur le pont roulant bipoutre. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 1/2 de l’épaule.
Epaule
La pièce constituant l’épaule du bras robotique se fixe sur la base. Ses dimensions sont conditionnées par l’implantation du servomoteur qui assure la rotation 2/2 de l’épaule.
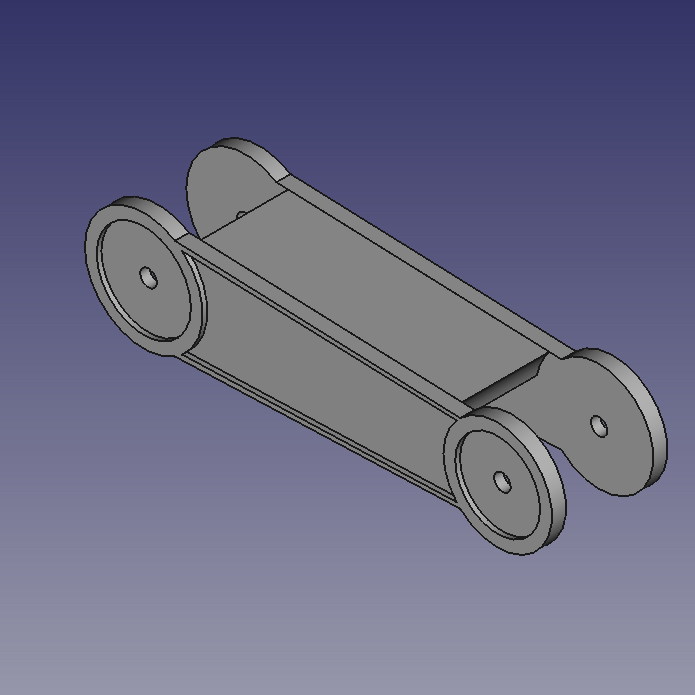
Bras et Avant-bras
Coude
La pièce qui assure la rotation 1/1 du coude intègre le Troisième servomoteur.
Poignet
La pièce constituant le poignet intègre un éventuel cinquième servomoteur dont la présence dépendra du design final du préhenseur.
Préhenseur
La conception du préhenseur reste à faire. L’objectif est de concevoir ( ou d’utiliser un concept existant ) un préhenseur capable de de s’équiper de différents outils spécialisés.
Calcul de masse
Le calcul de la masse maximale de chacune des composantes mécaniques du bras ; épaule, bras, avant-bras, permet de sélectionner le matériau adéquat pour la fabrication de ces pièces et de les dimensionner plus précisément ; épaisseur, densité …
Configurations de calcul
Configuration n°1 :
Cette première configuration présente des conditions favorables de ce calcul : Le bras à l’horizontal et l’avant bras vertical. Le poids équivalent aux poids de ces deux pièces (P) s’exerce à une distance restreinte du point de rotation. Par conséquent, le couple exercé par le moteur de l’épaule est plus faible que dans la deuxième configuration.
Configuration n°2 :
Cette configuration présente des conditions défavorables de ce calcul : le bras et l’avant bras sont tendus à l’horizontale. Le poids équivalent aux poids des deux pièces, s’exerce à une distance plus grande que dans la première configuration. Par conséquent, le couple exercé par le moteur de l’épaule est plus important.
Remarque : Même si la deuxième configuration reste improbable compte tenu de l’implantation des bras robotiques dans le diorama, elle permet une estimation des valeurs limites.
Données et approximations pour ce calcul
Le bras et l’avant-bras du bras robotique ont la même longueur (L = 15 cm). Le bras et l’avant-bras du bras robotique ont la même masse (m) répartie de manière homogène. La masse du poignet ( et du préhenseur ) sont négligées.
Caractéristiques techniques d’un servomoteur
Le site affiche un couple sous 4,8V de 1kg/cm (voir extrait). L’unité utilisée n’est pas conforme avec celle d’un couple qui devrait être 1kg.cm. Nous utiliserons cette valeur pour la suite des calculs.
Calculs
Configurations 1 :
C = L/2 x m + L x m C = (L/2 + L) x m C = 3/2L x m m = C / 3/2L m = 1 / (3/2×15) m = 44g
Configuration 2 :
C = L/2 x m + 3/2L x m C = (L/2 + 3/2L) x m C = 2L x m m = C / 2L m = 1 / (2×15) m = 33g
Lors de la phase de définition des besoins, l’identification et la prise en compte des parties prenantes autres que le client principal constituent un critère essentiel pour la réussite d’un projet. Dans le cadre du projet BATLab112, cette démarche implique la considération d’une partie prenante particulière, incontournable au sein de l’univers de Batman. L’intégration de cette partie prenante dans l’analyse des besoins permet d’assurer que les choix techniques et fonctionnels du projet répondent non seulement aux exigences explicites du client, mais également aux attentes implicites des acteurs clés qui interagissent avec le système.… Lire la suite →
Alfred Pennyworth occupe une position singulière dans l’univers de Batman, dont la représentation varie sensiblement selon les supports narratifs et les époques. Dans certaines œuvres, son rôle demeure volontairement restreint à une fonction domestique traditionnelle. Ainsi, dans Batman: The Animated Series (1992), Alfred est principalement cantonné à son statut de majordome, assurant l’intendance du manoir Wayne et apportant un soutien moral discret à Bruce Wayne, sans implication directe dans les opérations nocturnes de Batman. Cette approche est également perceptible dans le film Batman Begins de Christopher Nolan (2005), où Alfred apparaît avant tout comme un confident et un garant de la stabilité sociale de Bruce Wayne, son intervention restant limitée à un accompagnement indirect des activités du justicier.
À l’inverse, d’autres productions mettent en lumière une évolution marquée du personnage vers un rôle beaucoup plus opérationnel et stratégique. Dans le film d’animation Batman: Bad Blood (Mauvais Sang, 2016), Alfred se substitue temporairement à Bruce Wayne en utilisant une projection holographique afin de masquer la disparition de ce dernier, démontrant ainsi une capacité à assurer la continuité fonctionnelle de Bruce Wayne. Cette montée en responsabilité est encore plus explicite dans les films de Zack Snyder, où Alfred participe activement aux activités nocturnes du Chevalier Noir. Dans Batman v Superman: Dawn of Justice (2016), il contribue directement à la conception et à la fabrication de l’armure destinée à affronter Superman, assure la maintenance de la Batmobile et pilote à distance le Batwing afin de permettre à Batman de s’introduire dans l’entrepôt où est retenue Martha Kent. Ces exemples illustrent une transformation progressive d’Alfred Pennyworth, qui dépasse le cadre domestique pour s’imposer comme un acteur technique et stratégique, pleinement intégré au système opérationnel de la Batcave.
Alfred Pennyworth, majordome le jour de Bruce Wayne
Le jour, Alfred Pennyworth assume pleinement ses fonctions de majordome, centrées sur la gestion et l’entretien du manoir Wayne. Bien qu’il soit fréquemment représenté à l’écran en train d’exécuter des tâches domestiques, une approche réaliste conduit à considérer que l’ampleur et le standing du manoir nécessitent l’intervention d’un personnel nombreux et structuré. Dans cette perspective, le rôle d’Alfred dépasse la simple exécution pour s’inscrire dans une logique de coordination et de supervision des ressources humaines. Cette dimension managériale est notamment illustrée dans le film The Dark Knight Rises de Christopher Nolan, où Alfred est montré dirigeant une équipe chargée de préparer un buffet de réception, attestant ainsi de sa fonction de responsable opérationnel de l’organisation domestique du manoir.
Alfred Pennyworth, aide de camp nocturne de Batman
La nuit, Alfred Pennyworth est régulièrement présent au sein de la Batcave, où il assiste Batman dans la préparation et le suivi de ses enquêtes. Son rôle ne se limite pas à une présence passive : il intervient comme conseiller stratégique, contribuant à l’analyse des situations et à la prise de décision. Lorsque Batman est engagé sur le terrain, Alfred demeure fréquemment dans la Batcave afin d’achever des travaux techniques en cours ou d’assurer un soutien opérationnel à distance. Cette organisation traduit une répartition fonctionnelle des tâches, dans laquelle Alfred garantit la continuité et la fiabilité du système technique et informationnel sur lequel reposent les missions de Batman.
Le rôle stratégique d’Alfred Pennyworth : La Cour des Hiboux
Cette fonction de soutien opérationnel et de coordination prend une dimension particulièrement stratégique dans l’arc narratif des comics La Cour des Hiboux. Lors de l’attaque de la Batcave, c’est Batman qui enferme Alfred dans l’armurerie, afin de le protéger et de sécuriser l’accès aux ressources critiques, tandis qu’il engage directement le combat contre les assaillants. Depuis cet espace sécurisé, Alfred Pennyworth assume néanmoins un rôle central dans la gestion de crise : il assure la coordination tactique avec l’ensemble des alliés de Batman et prend le contrôle de certains systèmes techniques de la Batcave, notamment le système d’aération, qu’il utilise pour ralentir la progression des assaillants.
Cet épisode met en évidence la capacité d’Alfred à agir comme un opérateur de commandement en situation dégradée, malgré une contrainte physique forte. Il illustre également la confiance opérationnelle que Batman place en Alfred, en lui confiant implicitement la supervision des systèmes et la coordination des acteurs pendant son absence. Alfred apparaît ainsi comme un élément déterminant de la résilience organisationnelle et technique de la Batcave, capable d’en assurer la continuité fonctionnelle dans des conditions extrêmes.
Pour être parfaitement opérationnel, on peut penser que Alfred Pennyworth maitrise donc toutes les technologies présentes dans la Batcave. Dans le film de Zack Snyder – Batman vs Superman – on peut y voir Alfred chargé de la conception et de la réparation des équipements de Batman.
Un passé militaire au service du soutien stratégique de Batman
Une lecture militaire du personnage d’Alfred Pennyworth
Dans l’univers de Batman, Alfred Pennyworth est souvent réduit à la figure du majordome loyal et discret. Toutefois, de nombreuses œuvres issues des comics, du cinéma et des séries télévisées proposent une lecture plus approfondie du personnage, en soulignant un passé militaire qui constitue un élément structurant de son identité. Cette dimension, parfois implicite, parfois explicitement formulée, permet de comprendre la nature de son engagement auprès de Bruce Wayne et la spécificité de son rôle au sein de la Batcave.
Plusieurs continuités narratives établissent qu’Alfred Pennyworth a servi dans l’armée britannique, où il aurait acquis une formation rigoureuse en matière de discipline, de combat et de gestion de situations de crise. Cette expérience militaire se manifeste par sa capacité à conserver un sang-froid constant, à analyser rapidement des contextes complexes et à agir avec méthode dans des environnements à haut risque. Dans certaines œuvres, notamment les adaptations contemporaines, ce passé est précisé par une affiliation aux forces spéciales ou aux services de renseignement, renforçant ainsi son statut d’ancien homme de terrain.
Ce socle martial éclaire le rôle opérationnel qu’Alfred assume aux côtés de Batman. Au-delà de ses fonctions domestiques, il agit comme un véritable aide de camp, assurant la coordination tactique, le soutien logistique et la supervision des systèmes techniques de la Batcave. Sa maîtrise des technologies, sa compréhension des enjeux stratégiques et sa capacité à prendre des décisions en situation dégradée traduisent une continuité directe entre son passé militaire et son activité présente.
Ainsi, Alfred Pennyworth apparaît comme une figure de transition entre le monde militaire et l’univers du justicier masqué. Son parcours d’ancien soldat confère une profondeur particulière à son personnage, en faisant de lui non seulement un confident et un mentor moral, mais également un acteur essentiel de l’efficacité opérationnelle de Batman. Cette lecture contribue à revaloriser Alfred comme un personnage stratégique à part entière, dont l’expérience militaire constitue l’un des fondements narratifs majeurs.
L’héritage militaire d’Alfred Pennyworth – La série Pennyworth
Diffusée à partir de 2019, la série Pennyworth propose une relecture des origines d’Alfred Pennyworth, futur majordome de Bruce Wayne, en s’éloignant sensiblement de l’image domestique et effacée traditionnellement associée au personnage. L’intrigue se situe dans le Londres des années 1960 et met en scène Alfred comme un ancien soldat des forces spéciales britanniques, marqué par son expérience militaire et doté de compétences opérationnelles avancées. Loin d’un simple rôle de soutien, il est présenté comme un homme de terrain et d’action, engagé dans des missions dangereuses mêlant espionnage, violence politique et enjeux géopolitiques. La série met ainsi en évidence la dimension martiale, stratégique et morale du personnage, tout en soulignant la continuité entre son passé militaire et les qualités qui feront ultérieurement de lui un pilier essentiel de l’univers de Batman.
Alfred Pennyworth un homme d’action – L’animé Bad Blood (2016)
Dans le film d’animation Batman: Bad Blood, issu de l’univers DC, un groupe criminel dirigé par Talia al Ghul, assistée de son lieutenant connu sous le nom de l’Hérétique, procède à l’enlèvement de Bruce Wayne. Après l’avoir soumis à un conditionnement hypnotique, les ravisseurs orchestrent sa fuite, faisant de lui un instrument involontaire de leur stratégie. Ignorant l’emprise psychologique dont il demeure victime, Bruce Wayne reprend rapidement ses activités, notamment la conduite d’un projet aéronautique de haute technologie destiné à assurer la protection des populations à l’échelle internationale.
Lors de la cérémonie d’inauguration de cet aéronef, l’hypnose se manifeste pleinement : Batman, privé de son libre arbitre, se retrouve contraint d’affronter Nightwing, tandis que les autres alliés de la Bat-Family tentent de sécuriser les chefs d’État et dirigeants mondiaux réunis pour l’événement. Dans ce contexte de crise majeure, l’intervention d’Alfred Pennyworth s’avère déterminante. Par une action directe et résolue, il neutralise plusieurs criminels ayant pris le contrôle de l’aéronef, ainsi que le Chapelier fou, responsable du maintien de l’emprise hypnotique sur Batman et sur les dignitaires. Son engagement permet ainsi le rétablissement de la situation et contribue de manière décisive à l’issue favorable du conflit.
Alfred Pennyworth, infirmier militaire devenu le pilier médical de Batman
Alfred Pennyworth, au-delà de son rôle traditionnel de majordome et confident de Bruce Wayne, possède un profil professionnel marqué par des compétences médicales et paramédicales acquises au cours de son service militaire. Dans certaines continuités narratives, Alfred est présenté comme un ancien infirmier ou médecin militaire, formé à la prise en charge de blessures de guerre, à la réanimation et à la gestion de situations médicales critiques sur le terrain. Cette expertise confère au personnage une dimension opérationnelle supplémentaire, le positionnant comme un acteur clé non seulement de la logistique et de la coordination, mais également de la survie physique et stratégique de Batman.
Dans l’univers de Batman, la fonction médicale d’Alfred est essentielle pour assurer la pérennité des missions du justicier masqué. Les interventions d’Alfred incluent le traitement des blessures consécutives aux combats contre les criminels, la gestion des traumatismes et la supervision des soins de réhabilitation après des confrontations particulièrement violentes. Sa formation militaire garantit un niveau de précision et d’efficacité élevé, capable de gérer des situations urgentes et complexes dans un environnement contraint, souvent isolé de tout secours externe.
Par ailleurs, Alfred assure une dimension éminemment stratégique à ses compétences médicales. En tant que gardien de l’identité secrète de Batman, il combine ses fonctions d’infirmier et de confident pour traiter les blessures de Bruce Wayne tout en garantissant une confidentialité totale. Cette double responsabilité – médicale et sécuritaire – renforce le rôle d’Alfred comme pilier de la résilience de Batman, permettant au justicier de reprendre ses missions avec un minimum de vulnérabilité. Les soins prodigués par Alfred ne sont donc pas de simples gestes humanitaires : ils constituent un maillon crucial dans la chaîne opérationnelle de Batman, assurant la continuité de ses activités dans un contexte où la moindre fuite d’information pourrait compromettre son identité et ses missions.
Ainsi, l’expertise d’Alfred Pennyworth en matière de soins militaires et médicaux, combinée à sa loyauté et à sa discrétion, en fait un personnage stratégique à part entière. Son rôle dépasse celui de simple soutien domestique et logistique : il est un acteur de la préservation physique, psychologique et opérationnelle de Batman, capable de concilier intervention médicale, gestion de crise et protection du secret. Cette lecture contribue à enrichir la représentation d’Alfred comme figure multidimensionnelle, à la croisée de la médecine de terrain, de la stratégie et de la sécurité dans l’univers de Batman.
Synthèse
Compte tenu du rythme de vie soutenu que mène Alfred Pennyworth, pour assurer son rôle de majordome dans le manoir le jour et être toujours disponible pour Batman la nuit, il est raisonnable de penser qu’il sous traite largement les tâches d’entretien du manoir, pour se consacrer à sa mission d’aide de camp pour Batman.
Ses compétences l’amènent certainement à passer beaucoup de temps dans la Batcave le jour comme la nuit pour assister Batman dans ses enquêtes ou entretenir son équipement.
L’architecture de la Batcave du projet BATLab112 doit donc permettre à Alfred Pennyworth d’entrée et sortir fréquemment. Les équipements qui composent la Batcave doivent lui permettre de visualiser en permanence l’intérieur et l’extérieur du manoir.
La Batcave du projet BATLab112 doit aussi disposer d’une infirmerie suffisamment équipée en matériel chirurgical de pointe, pour que Alfred puisse pratiquer les soins nécessaires à Bruce Wayne, quelques soient la gravité et la nature de ses blessures.
La suite des articles sur la définition des besoins du projet BATLab112
Dans la première étape de gestion de projet, la première action consiste à apprendre à connaitre le client à qui se destine le projet. En effet, pour comprendre un client, et être en capacité de lui proposer des solutions adaptées, il est essentiel de le connaitre suffisamment pour comprendre ses besoins et ses attentes. Dans…











































































{kind=link}