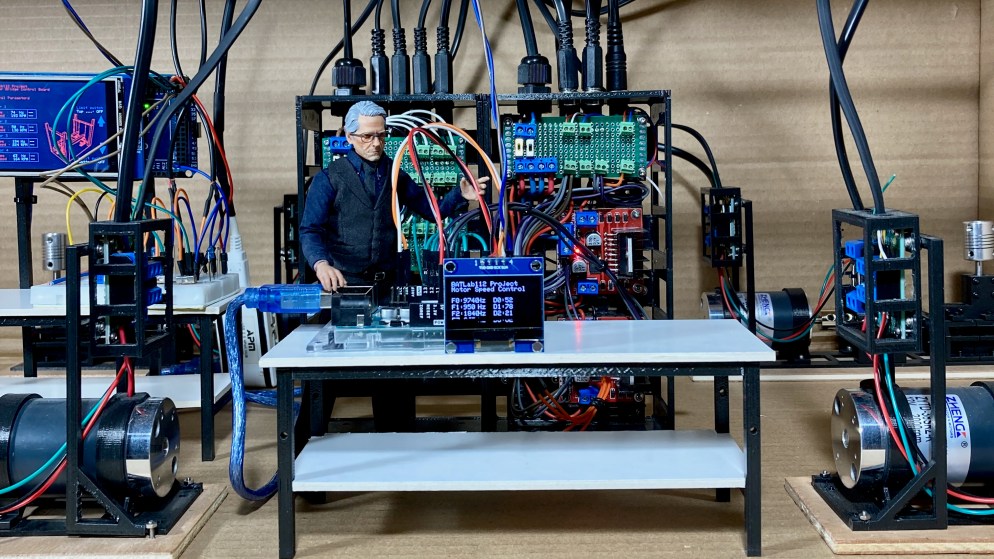
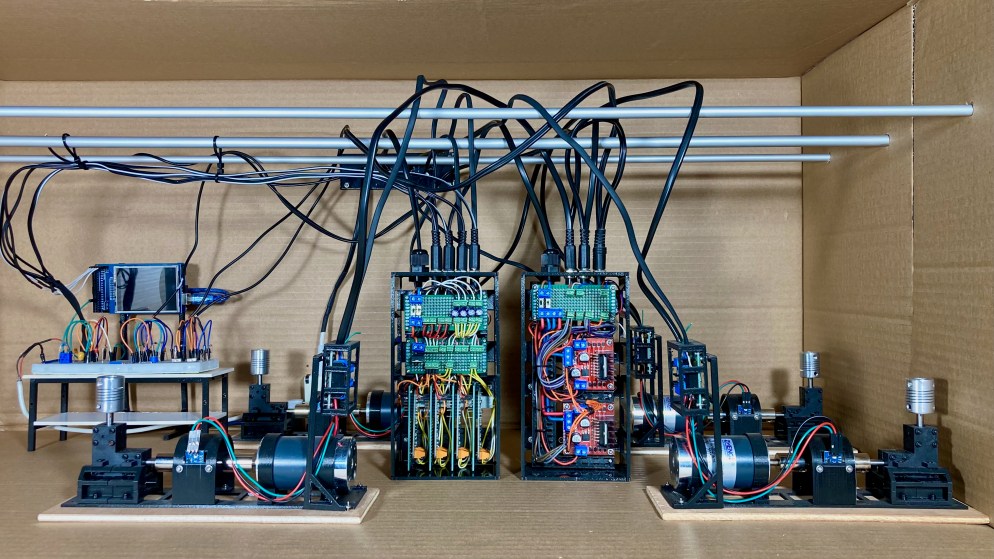
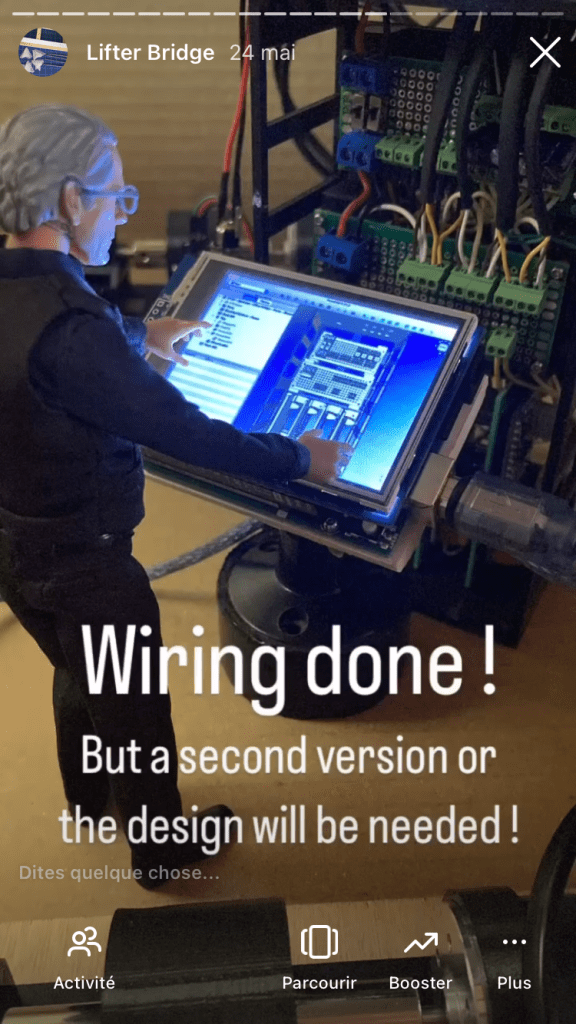
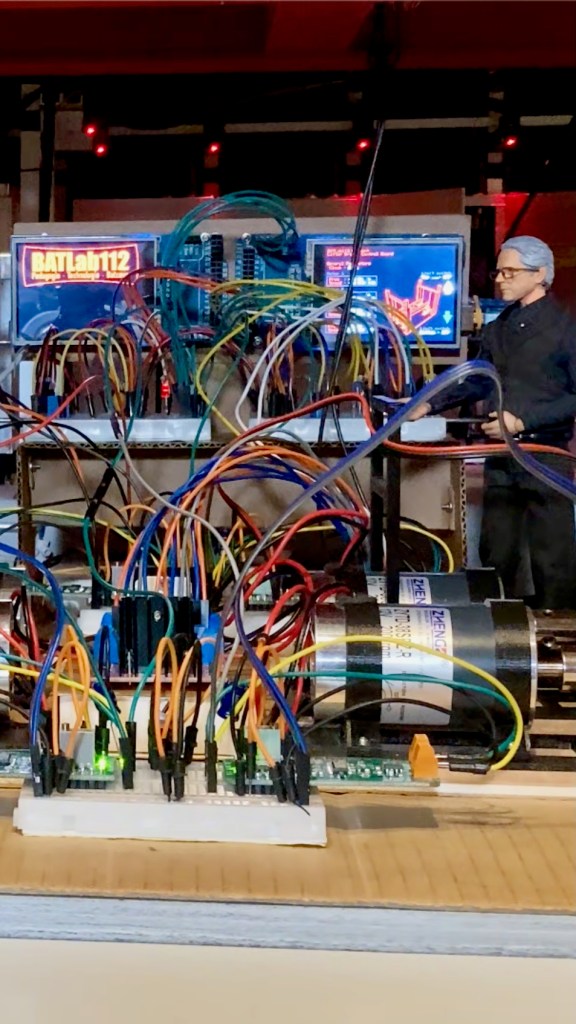
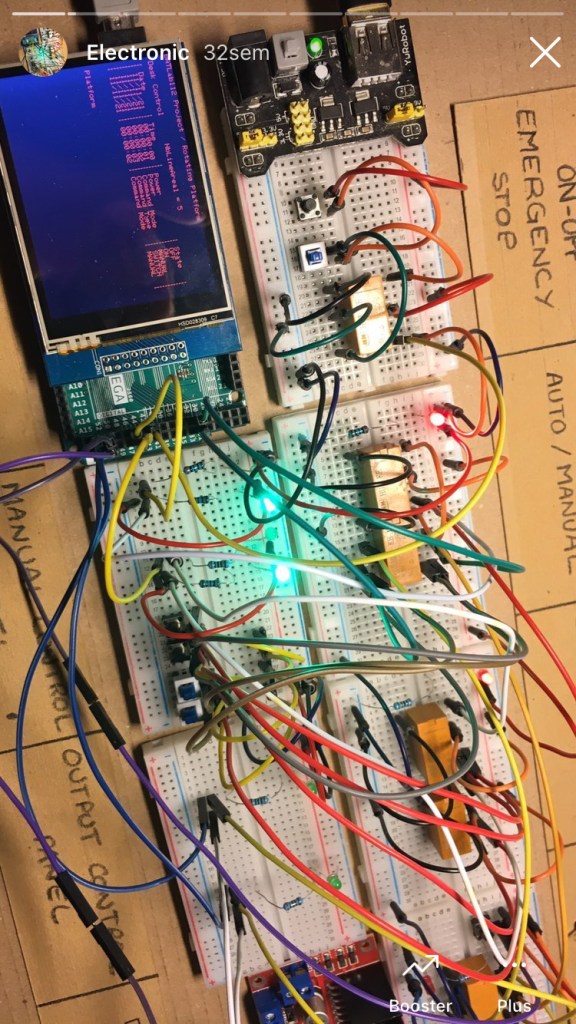
Depuis le point d’avancement précédent, d’importantes évolutions sont à présent fonctionnelles. Dans la moitié inférieure de la photo, le poste électrique est opérationnel. Il alimente en énergie électrique l’ensemble des équipements industriels du diorama de la Batcave. Dans la moitié supérieure de l’image, deux des quatre consoles de commandes des équipements industriels sont complètement opérationnelles. Ces deux consoles pilotent la plateforme rotative ainsi que le pont roulant.
English
This text is an automatic translation from French. If you see any possible improvements, say so in the comments.
Since the previous point of progress, important developments are now functional. In the lower half of the photo, the electrical substation is operational. It supplies electrical energy to all of the industrial equipment in the Batcave diorama. In the upper half of the image, two of the four industrial equipment control consoles are fully operational. These two consoles control the rotating platform as well as the overhead crane.
Español
Este texto es una traducción automática del francés. Si ve alguna posible mejora, dígalo en los comentarios.
Desde el punto de avance anterior, ahora están en funcionamiento importantes desarrollos. En la mitad inferior de la foto, la subestación eléctrica está operativa. Suministra energía eléctrica a todos los equipos industriales del diorama Batcueva. En la mitad superior de la imagen, dos de las cuatro consolas de control de equipos industriales están en pleno funcionamiento. Estas dos consolas controlan la plataforma giratoria y el puente grúa.
Timeline
Avancement du diorama
Derniers articles
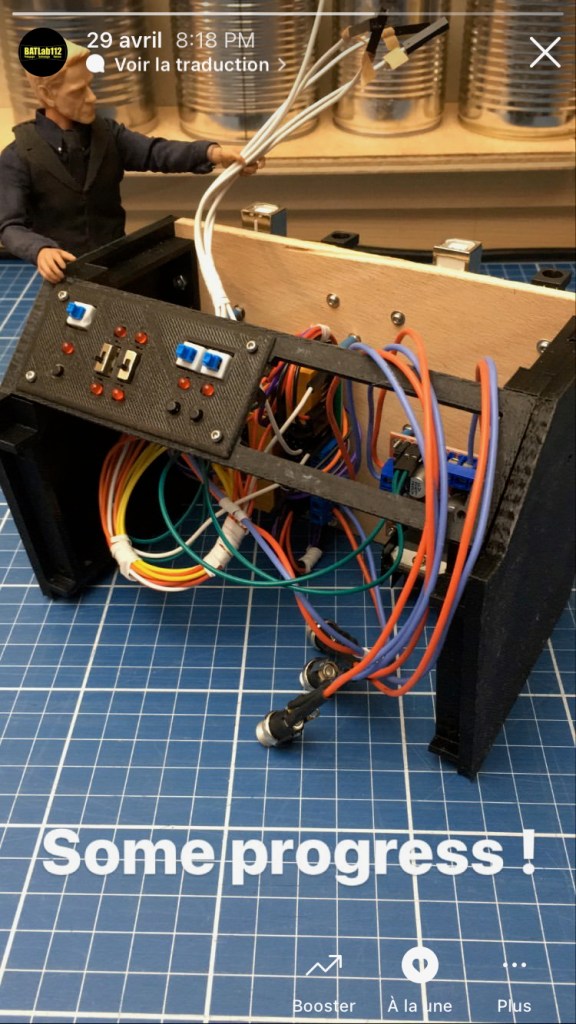
Story
Sur les réseaux
Youtube
Cette vidéo est diffusée sur l’ensemble des réseaux du projet BATLab112.
Instagram
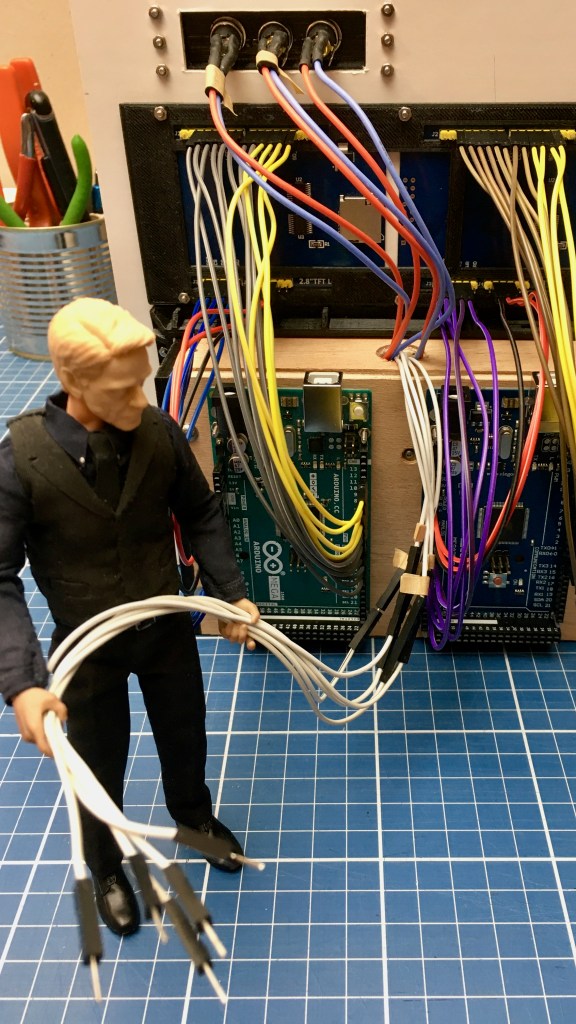
Dernier post sur le compte Instagram du projet BATLab112
The main aim of gamification, i.e. the implementation of game design elements in real-world contexts for non-gaming purposes, is to foster human motivation and performance in regard to a given activity.
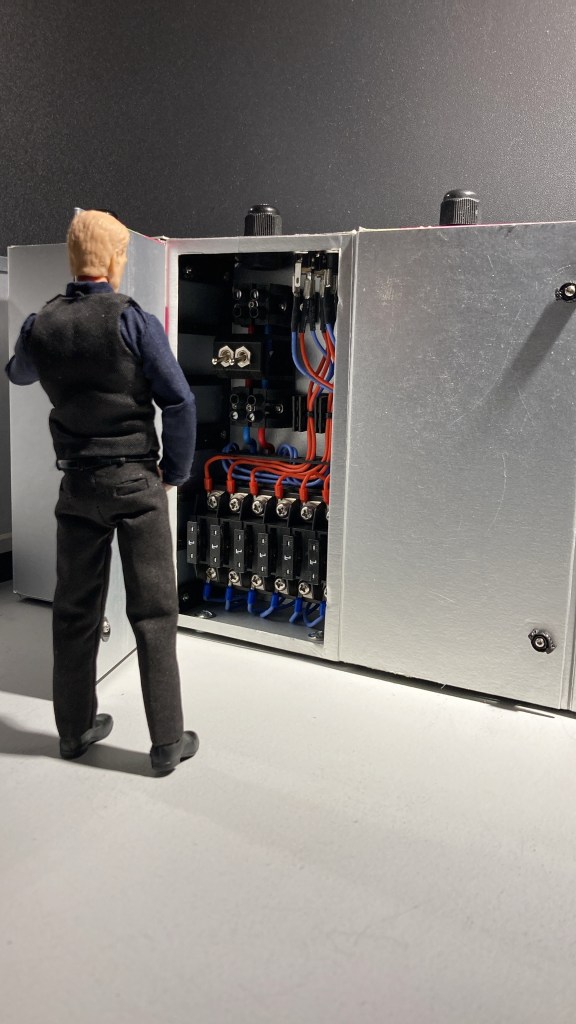
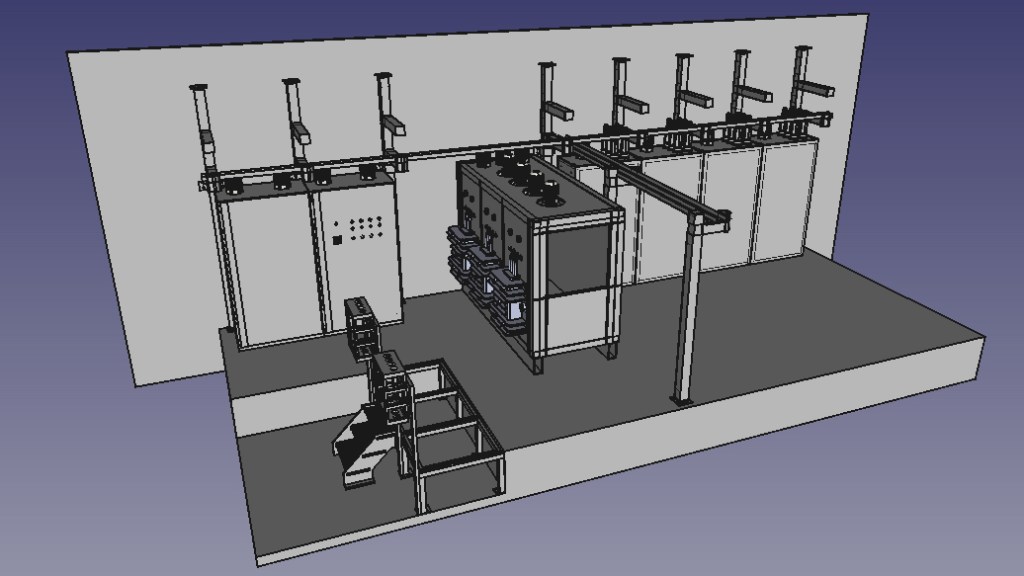
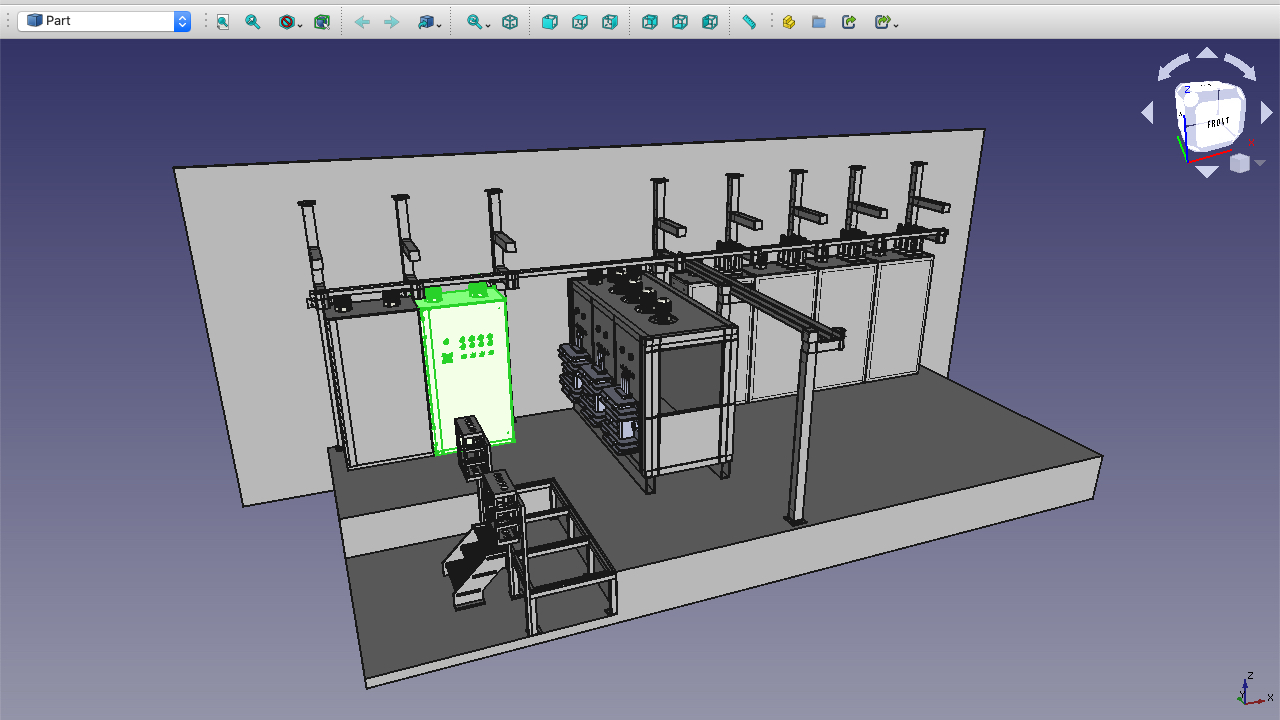
Cet article présente la deuxième version de la conception détaillée, du local électrique à l’échelle 1/12, du diorama de la Batcave du projet BATLab112. Cette mise à jour de cette conception est en lien avec la réalisation du premier modèle opérationnel du local technique.
Cet article fait suite à l’article précédent sur la conception détaillée du local technique et ceux de la fabrication des différents éléments du modèle opérationnel.
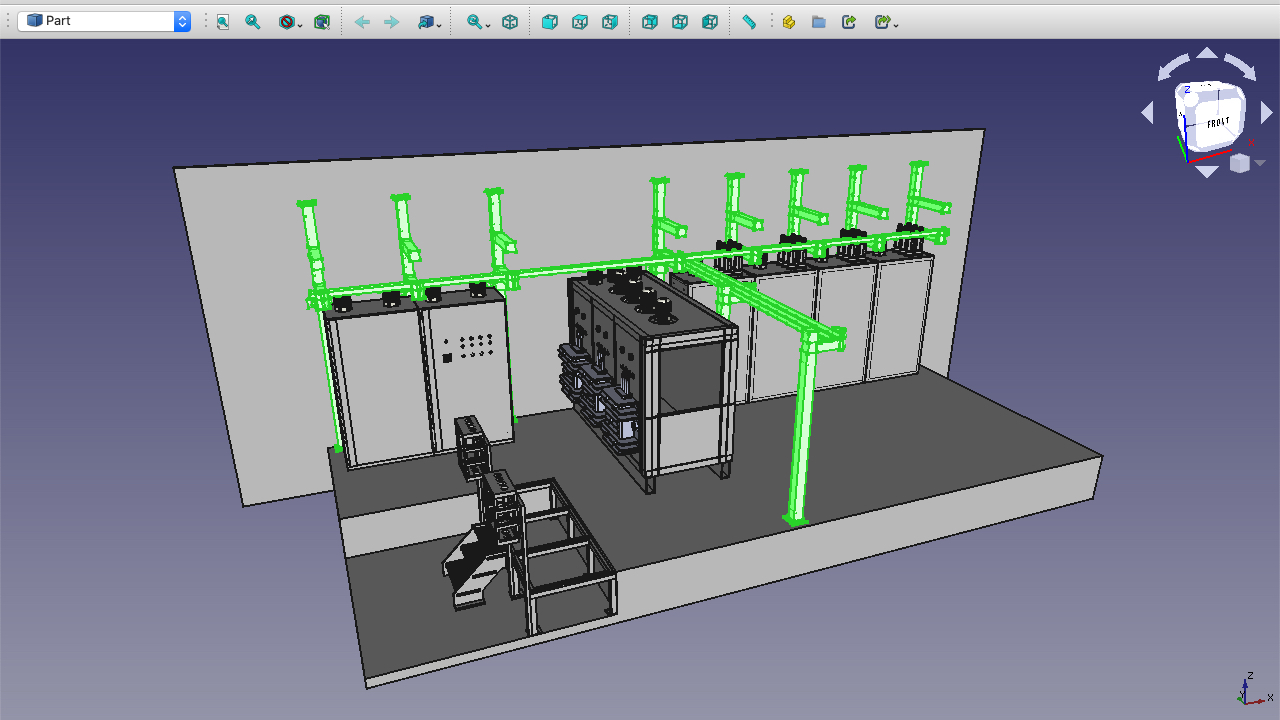
Structure Cantilever de support des chemin de câble
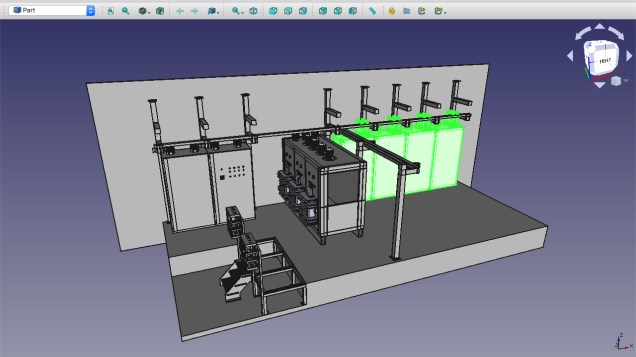
Passerrelle d’accès au local électrique
Les modifications par rapport à la précédente version de la conception détaillée :
Une quatrième armoire de distribution
La structure Cantilever de support des chemin de câbles
Un premier design de la passerelle d’accès au local électrique
Une quatrième armoire de distribution
Cette quatrième armoire de distribution, identique dans sa conception au 3 premières est une armoire supplémentaire pour assurer la distribution des tensions 12VDC.
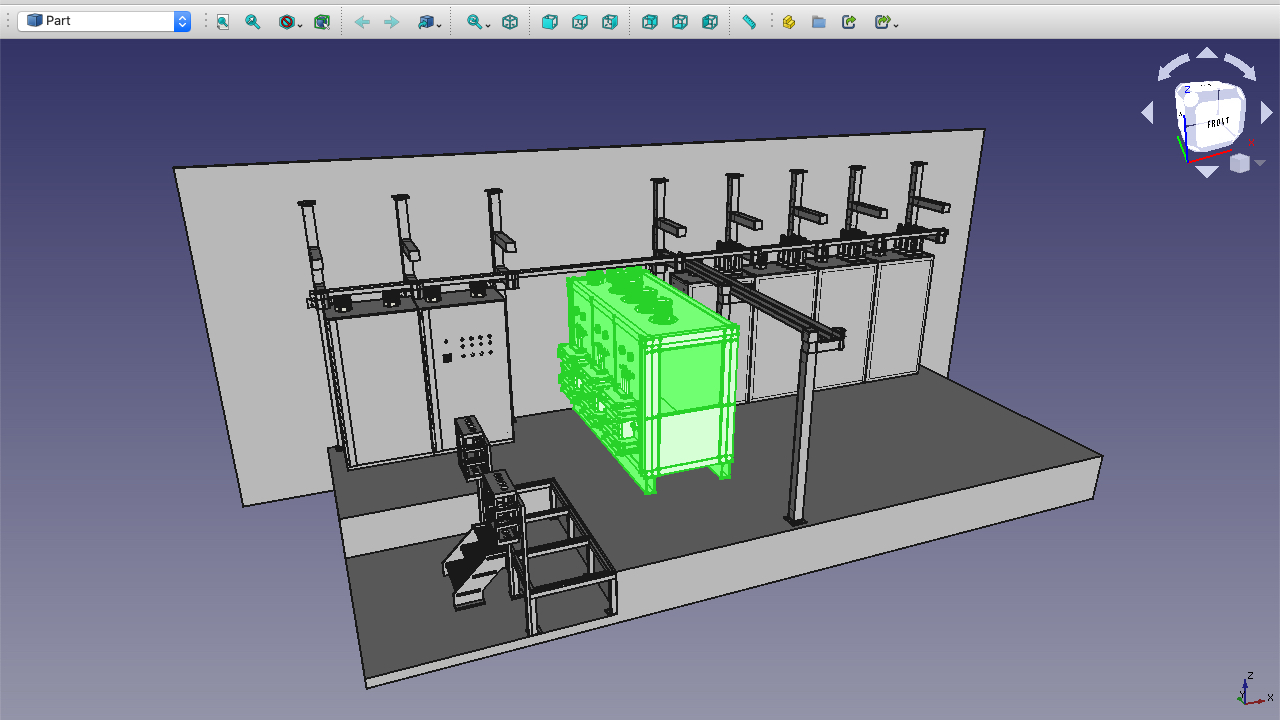
Armoires de distribution
La structure cantilever
Cette structure est conçue comme support au chemin de câble. Le détail de sa conception fera l’objet d’un prochain article en cours de rédaction.
Structure Cantilever de support des chemin de câble
La passerelle d’accès
La conception de cette passerelle n’est pas encore totalement aboutie lorsque cet article sera mis en ligne. Un article dédié est en cours de rédaction.
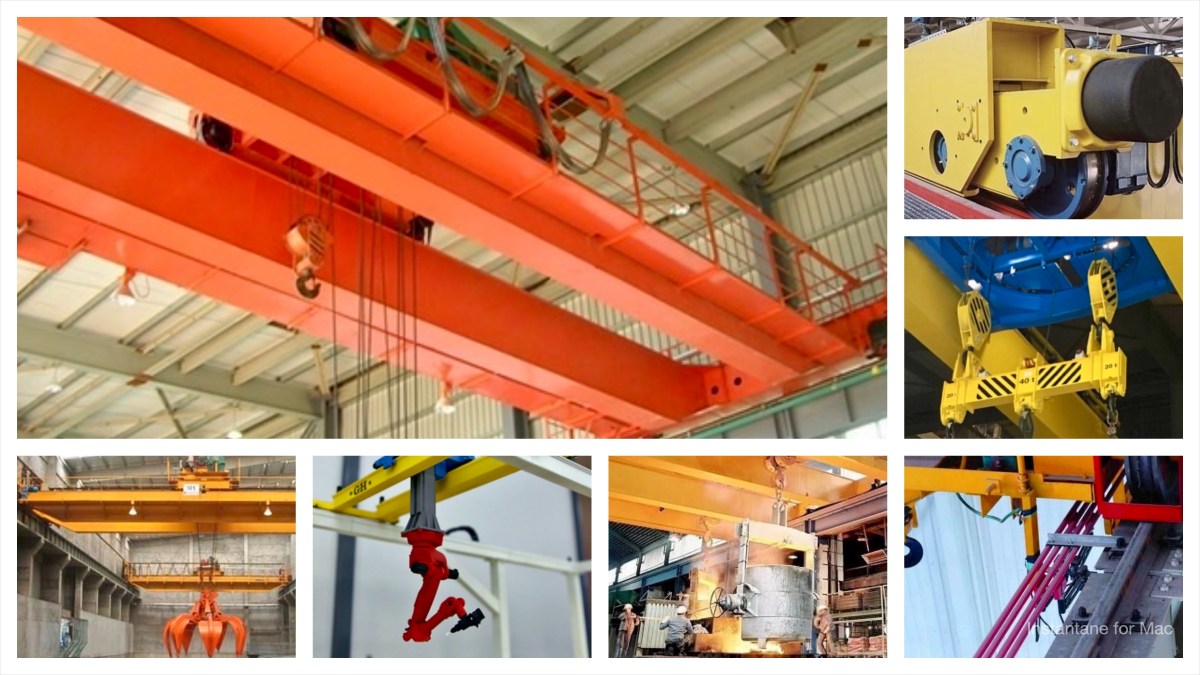
Cet article de présentation de la structure mécanique du pont roulant bipoutre fait suite à un article de présentation de la conception préliminaire de cet équipement.
Si ce prototype permet de valider le design de la structure du quadrilatère du pont roulant, il reste à présent à définir plus précisément le design des rails de roulement du pont ainsi que le système de festons de câbles électriques.
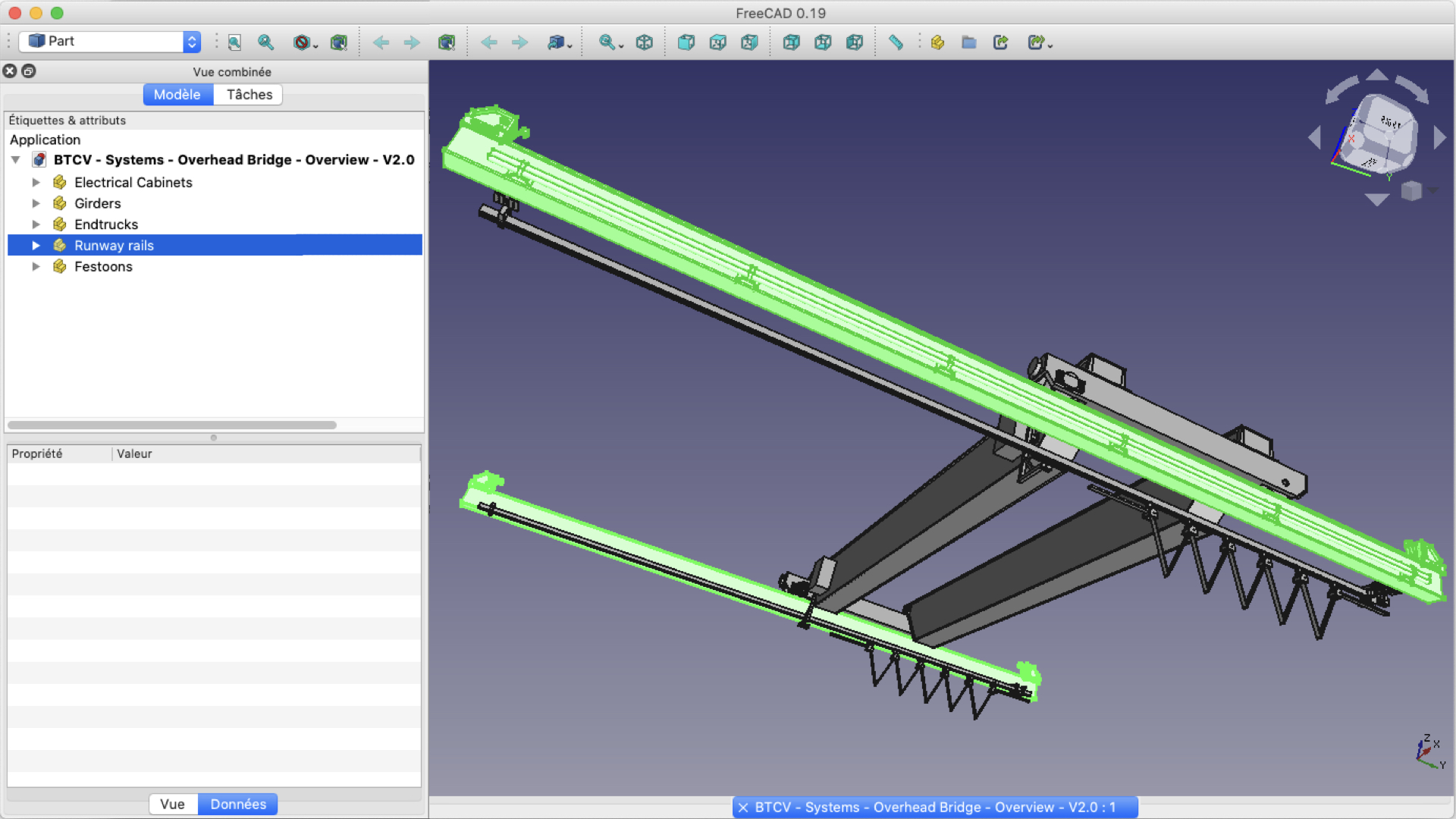
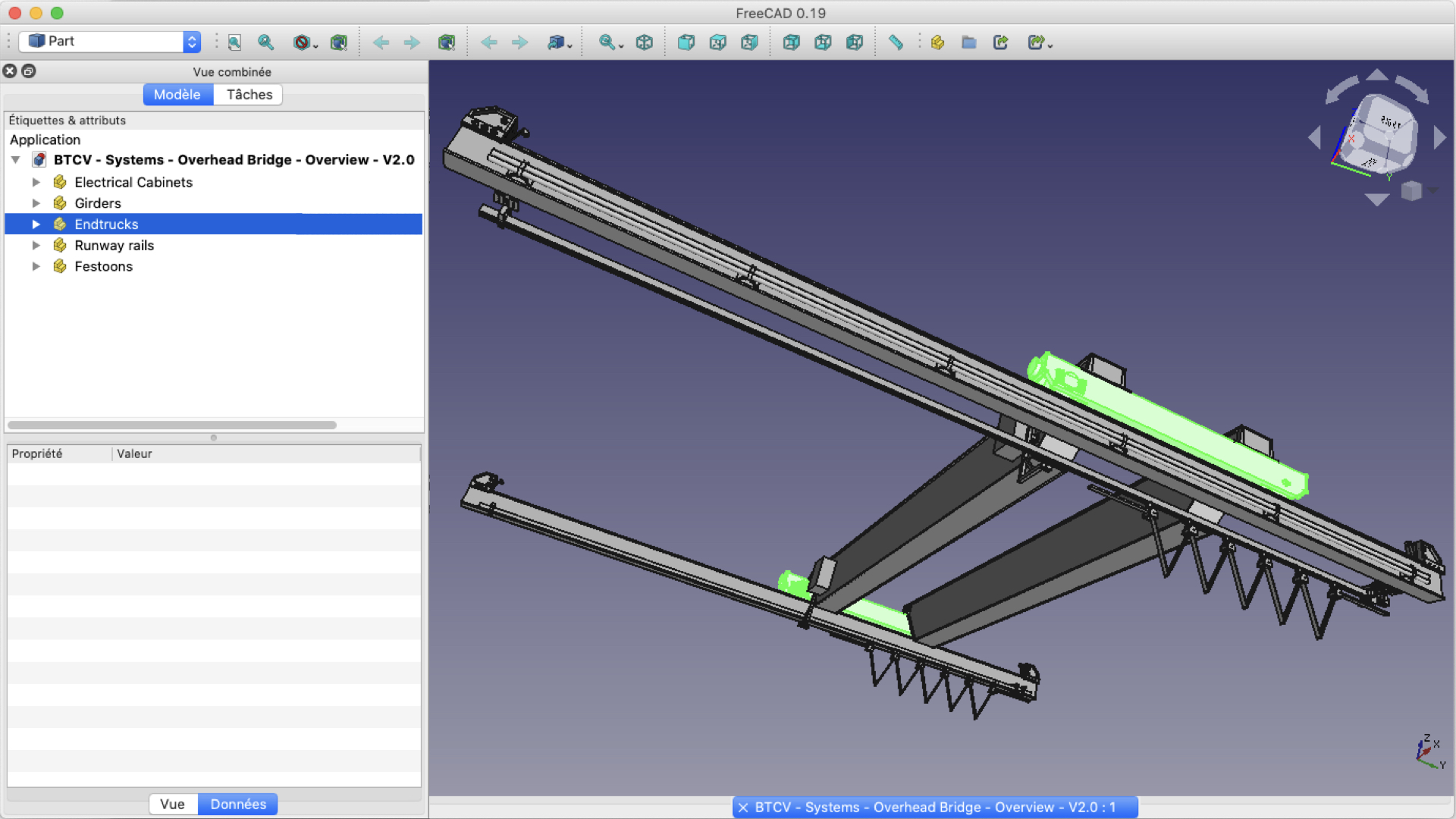
Vue générale du pont roulant
Screenshot n°1 : Armoires de raccordement électrique des moteurs
Screenshot n°2 : Festons de câbles électriques
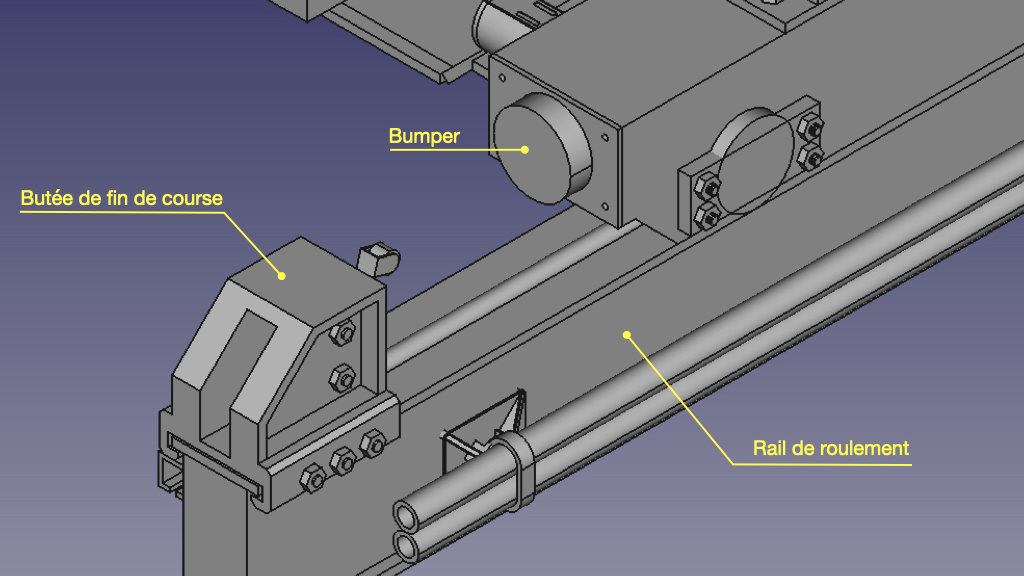
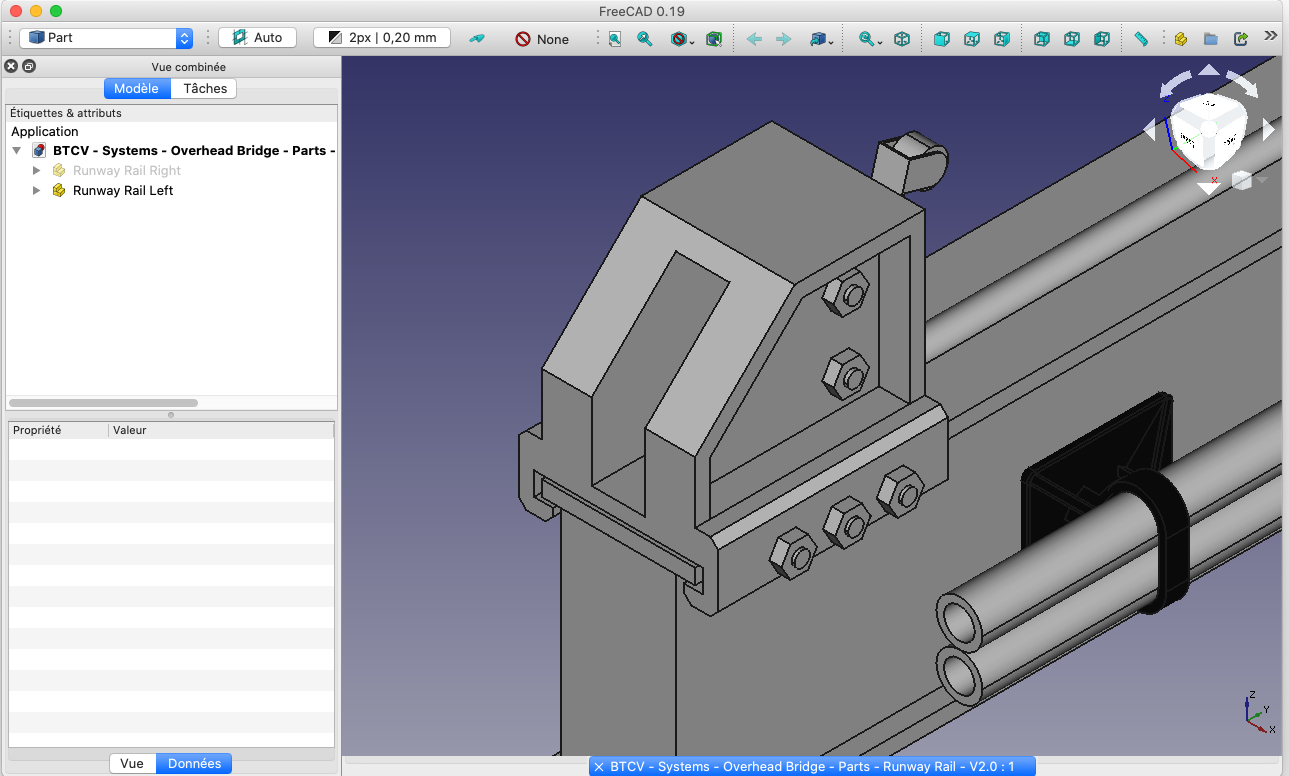
Screenshot n°3 : Rails de guidage et butées de fin course
Screenshot n°4 : Sommiers du pont roulant
Screenshot n°5 : Poutres du pont roulant
Festons de câble
Vues générales
Cette vue en perspective axonométrique plongeante montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Cette vue en perspective axonométrique en contre plongée montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Vues de détails
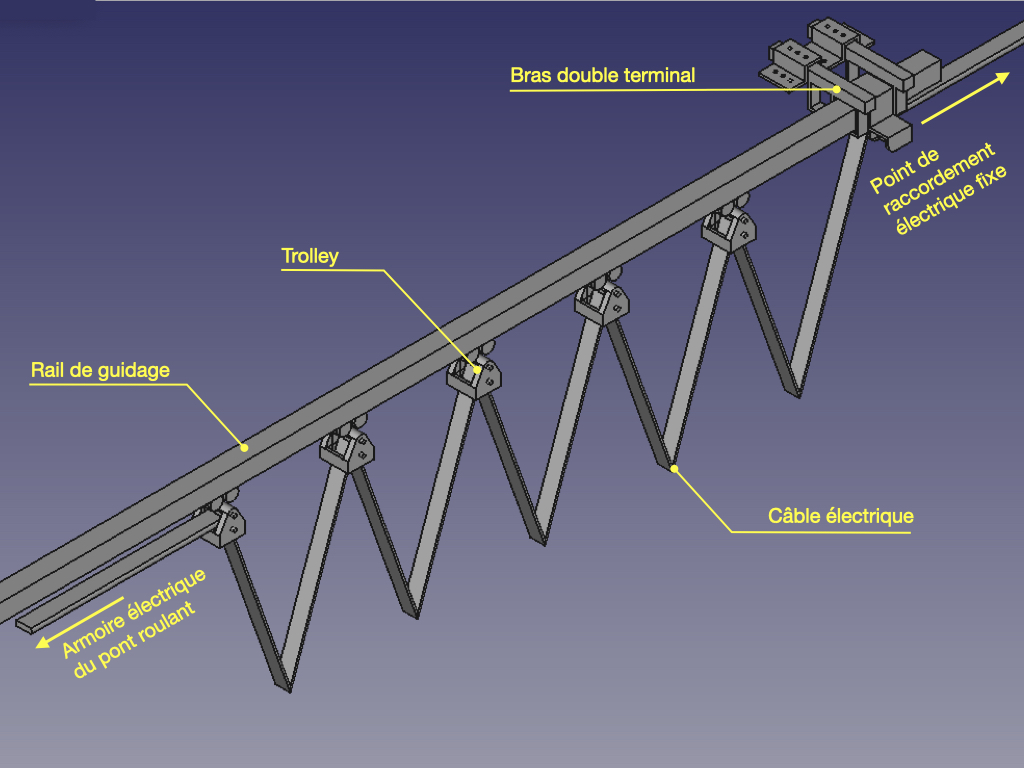
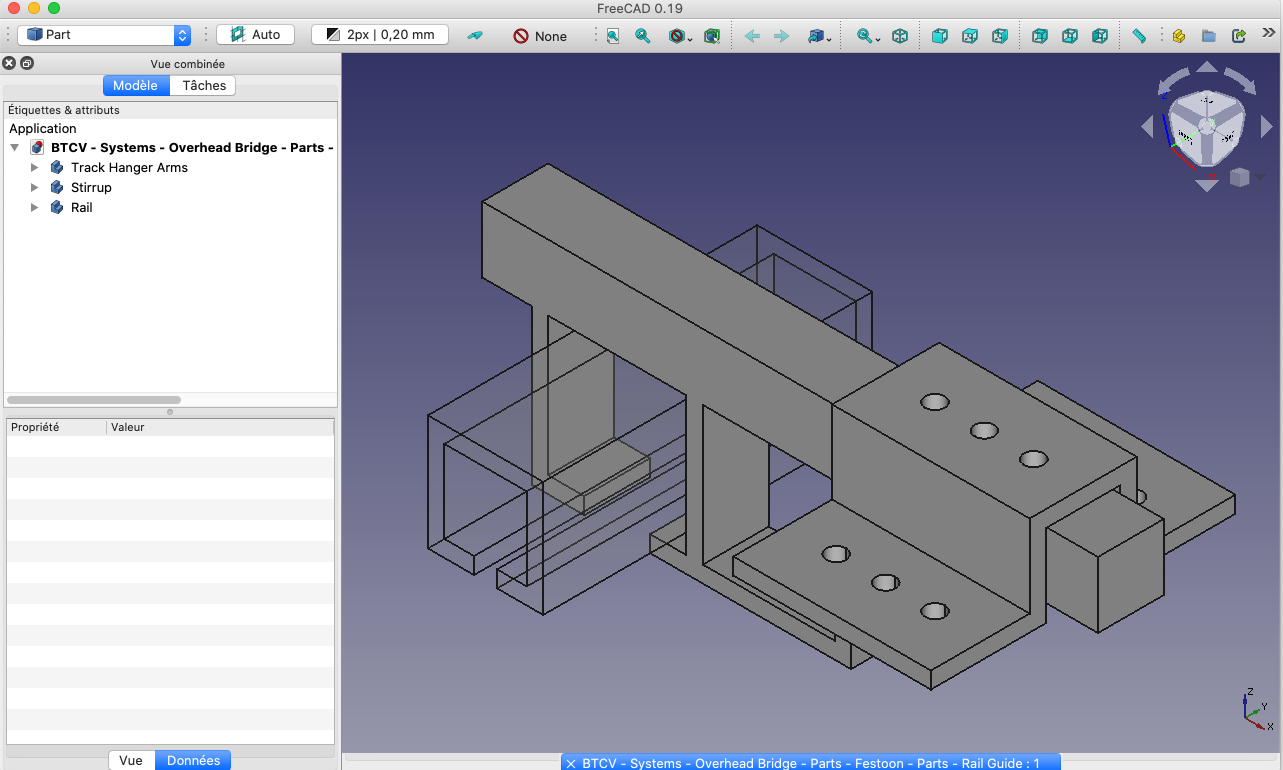
Bras de suspension des rails des festons des câbles
Les rails de guidage des festons de câble sont suspendus par des bras. Ces bras sont composés de deux parties : Le bras de suspension du rail et l’étrier de maintien du bras. Le design de ces deux pièces est conçu pour une réalisation par impression 3D. La fixation des étriers sur la structure du diorama est réalisée par des clous à tête suivant l’implantation des rangées de trou. Le nombre d’ensembles bras et étrier reste à définir en fonction des contraintes lors de la fabrication du modèle opérationnel.
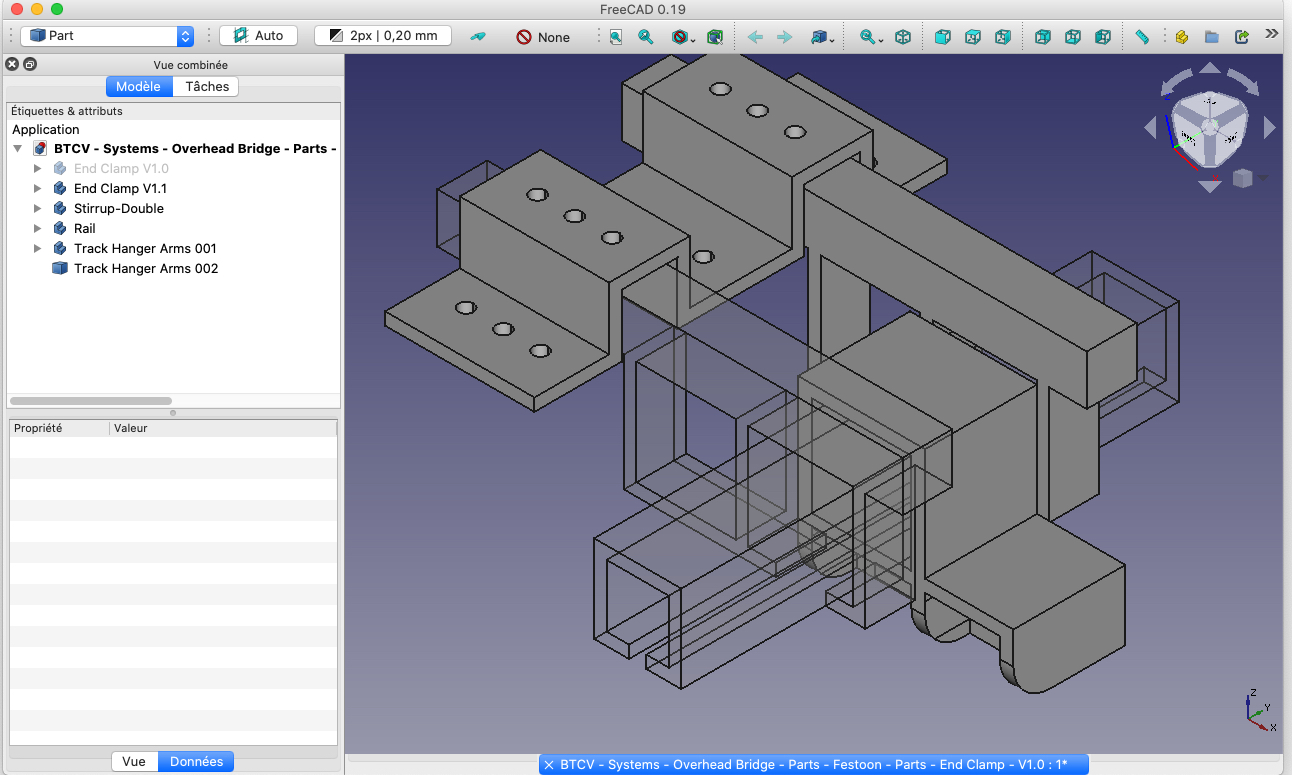
Bras de suspension terminaux des festons de câbles
Pour guider le câble vers son point de raccordement électrique et éviter toute tension due au déplacement du pont, deux bras de suspension du rail de guidage sont fixés par un étrier double. Un guide de câble est alors positionné sur le rail entre les deux bras. En passant dans ce guide, le câble est alors dirigé vers son point de raccordement, tout en étant maintenu en position face à la tension exercée sur le câble lors du déplacement du pont roulant.
Trolleys de roulement des festons
Pour garantir le guidage du câble le long de son rail, des trolleys sont utilisés pour supporter le câble et assurer son guidage grâce à 2 séries de 2 rouleaux enserrant la partie inférieure du rail de guidage. Le design de ces pièces est conçu pour une réalisation par impression 3D.
Butées de fin de course
Vues générales
Les butées de fin de course sont placées à l’extrémité des rails de roulement d’un pont roulant. Ces dispositifs constituent une limite physique dans le déplacement du pont roulant, servant de sécurités en empêchant le pont roulant de sortir de ses rails, chuter et faire chuter la charge qu’il transporte.
Les bumpers sont des tampons d’amortissement du choc du contact du pont roulant avec les butées de fin de course. Ils sont installés aux extrémités des deux sommiers du pont roulant (éléments moteur du pont roulant).
Vues de détails
Chacune des quatre butées de fin de course est équipée d’un capteur coupe circuit. Si le pont roulant vient jusqu’au contact d’une butée, il actionne alors son capteur qui coupe l’alimentation électrique des moteurs, entrainant l’arrêt du pont. Le design du corps de ces butées est conçu pour être réaliser par impression 3D. La fixation des butées sur la rail de roulement du pont est réaliser par 6 boulons M2. Le capteur électrique est inséré dans le corps de la butée, maintenu en position par 2 boulons M2.
Bumpers
Le design des bumpers est conçu pour être réaliser par impression 3D. Ils sont fixés sur les extrémités des sommiers par 2 rangées de 3 clous à tête.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Le design de toutes ces pièces ont été conçus pour être réaliser par impression 3D.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
Production : Title : Category : Batmobile : Figure :
https://youtube.com/@giworld7966 Batcave Diorama Making of DIY Jada Toys Justice League Batmobile & Batman Jada Toys Justice League Batmobile & Batman
Post : Duration : Quality : Scale : Comments :
February 2023 5:40 HD 1080p 1:32 None
Scénographie / Scenography
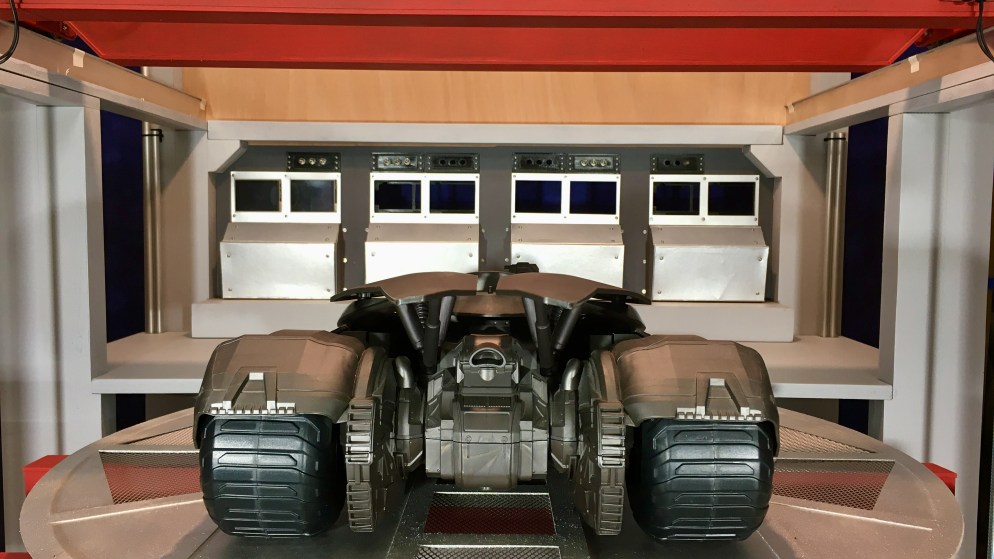
This diorama features a 1/32 scale Batmobile and a Batman figure from Zack Snyder’s Justice League. The Gothic style architecture of the Batcave seems inspired by Tim Burton’s movies with a dark rough and rocky cave on several levels. The Batcave design is simple. It is composed of only one open cavity on the front face. All the walls cave are covered with rocks. The rocks appearance is quite uniform but realistic and well detailed with a brush effect.
This diorama features three staging elements, distributed at different heights in the diorama for better visibility. In the back we can see the door to the Batcave access and the stairs to a rocky platform with the Batcomputer. In the front, there is the rocky platform to park the Batmobile. A fixed footbridge connects the platform to the ground floor of the Batcave. The arrangement of these three elements draws a path from the door to the Batmobile.
Technical details
The making of shows a picture frame used as a rigid base. All the Batcave walls are made with polystyrene plates cut, glued and then coated and painted. A garland of blue LEDs is used to illuminate the diorama and simulate the lighting of the Batcave.
This diorama does not include any animation system. The lighting of the blue leds is fixed.
L’origine de ma réflexion concernant l’usage d’un diorama comme support pédagogique s’inscrit initialement dans une démarche centrée sur la commande de bras robotiques. Cette orientation répondait pleinement à mon objectif de renouer avec des disciplines telles que l’électronique, l’automatisme et la robotique. Elle s’articulait également avec l’intérêt croissant que je portais à la technologie Arduino. Ayant étudié, au cours de mon cursus, la programmation de microcontrôleurs et d’automates programmables, j’ai été particulièrement impressionné par la simplicité d’utilisation et le potentiel offert par les cartes Arduino.
Cette réflexion serait probablement demeurée au stade théorique — limitée à quelques esquisses conceptuelles et fichiers de modélisation 3D conçus sous FreeCAD — sans un événement déterminant pour la suite du projet : la réception, à titre de don, d’une carte Arduino Due. Ce geste a constitué un véritable catalyseur, me conduisant à passer de la conceptualisation à l’expérimentation concrète. J’ai ainsi entrepris de me familiariser avec l’environnement matériel et logiciel propre à cette carte, prélude au développement d’une première maquette de bras robotique pilotée par l’Arduino Due.
Malgré les imperfections inhérentes à cette première construction, cette maquette a constitué une étape décisive en rendant le projet tangible et dynamique. Elle a renforcé ma motivation à poursuivre son développement. Je suis pleinement conscient que cette avancée doit beaucoup à Rémi, membre de ma famille et généreux donateur de la carte, dont le geste a joué un rôle déterminant dans l’évolution du projet.
Quelques années plus tard, dans le cadre du développement du projet BATLab112, j’ai été amené à mobiliser d’autres modèles de cartes Arduino, parmi lesquels les cartes Uno et Mega, ainsi qu’un ensemble de modules complémentaires tels que des capteurs divers et des écrans tactiles. Le modèle de console de commande conçu pour piloter les différents systèmes du diorama à l’échelle 1/12 intègre notamment deux cartes Arduino Mega. Celles-ci assurent à la fois la gestion de l’affichage sur deux écrans tactiles et l’interprétation des commandes émises par l’utilisateur.