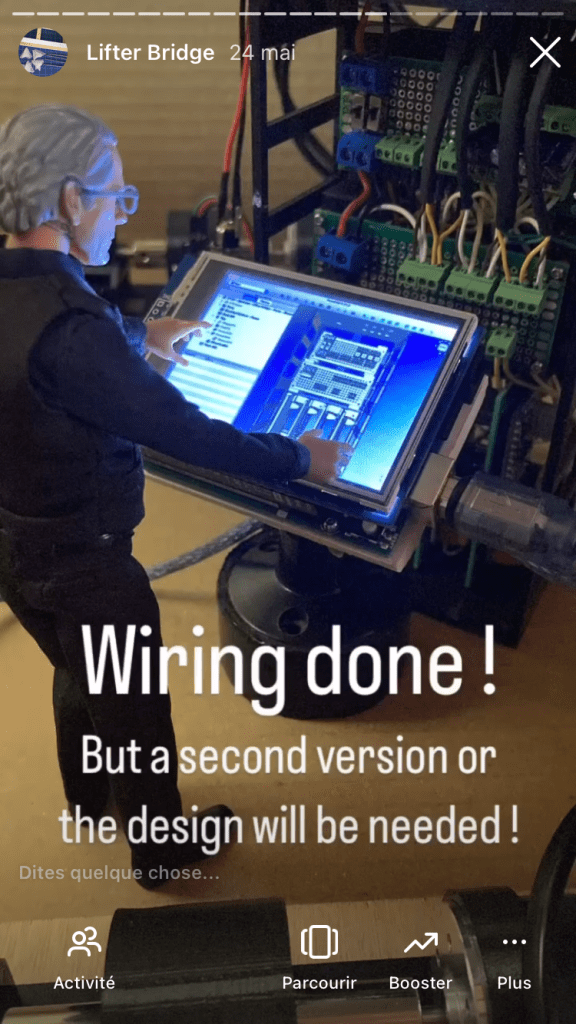
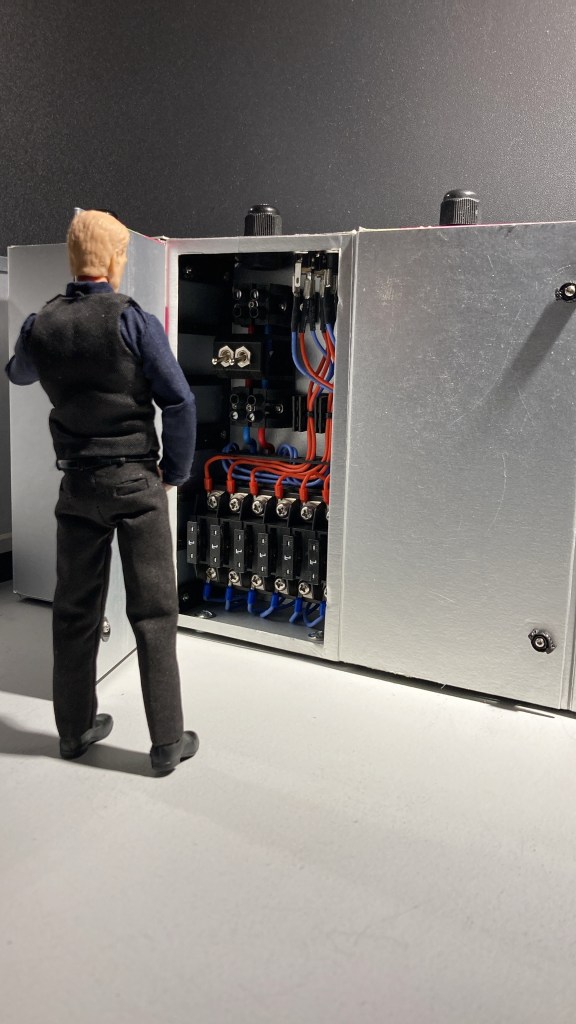
Contrôle du câblage de la première armoire électrique dédié au pont élévateur.
Cette armoire est destinée à regrouper les équipements électroniques et électriques nécessaires à la régulation de vitesse des moteurs du pont élévateur. Cette armoire contient notamment quatre cartes électroniques convertisseurs de fréquence en tension pour convertir les signaux de fréquence variable, issus des capateurs de mesure de la vitesse de rotation des moteurs, en signaux de tension proportionnelle, compatibles avec leurs traitements par une carte Arduino.
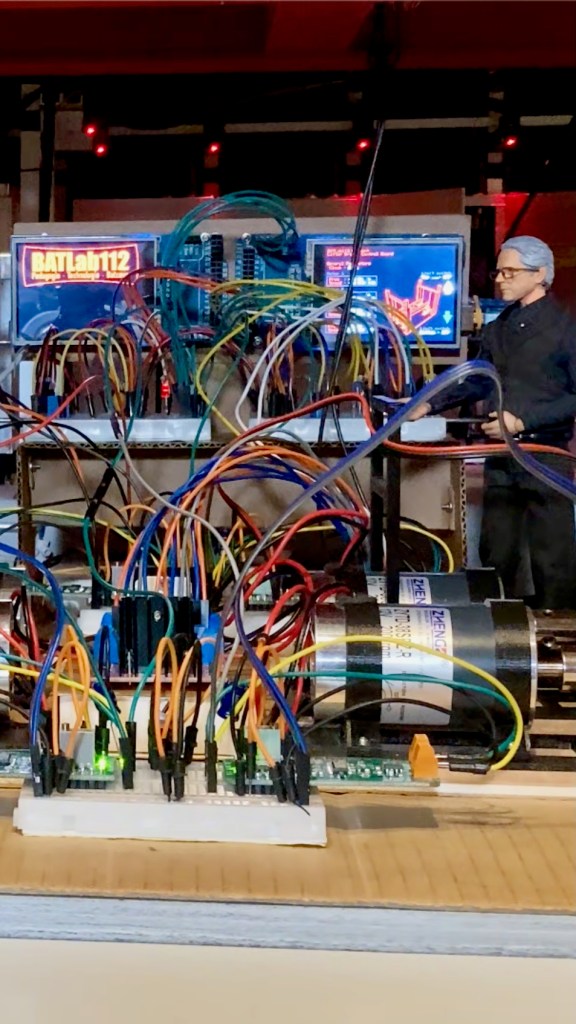
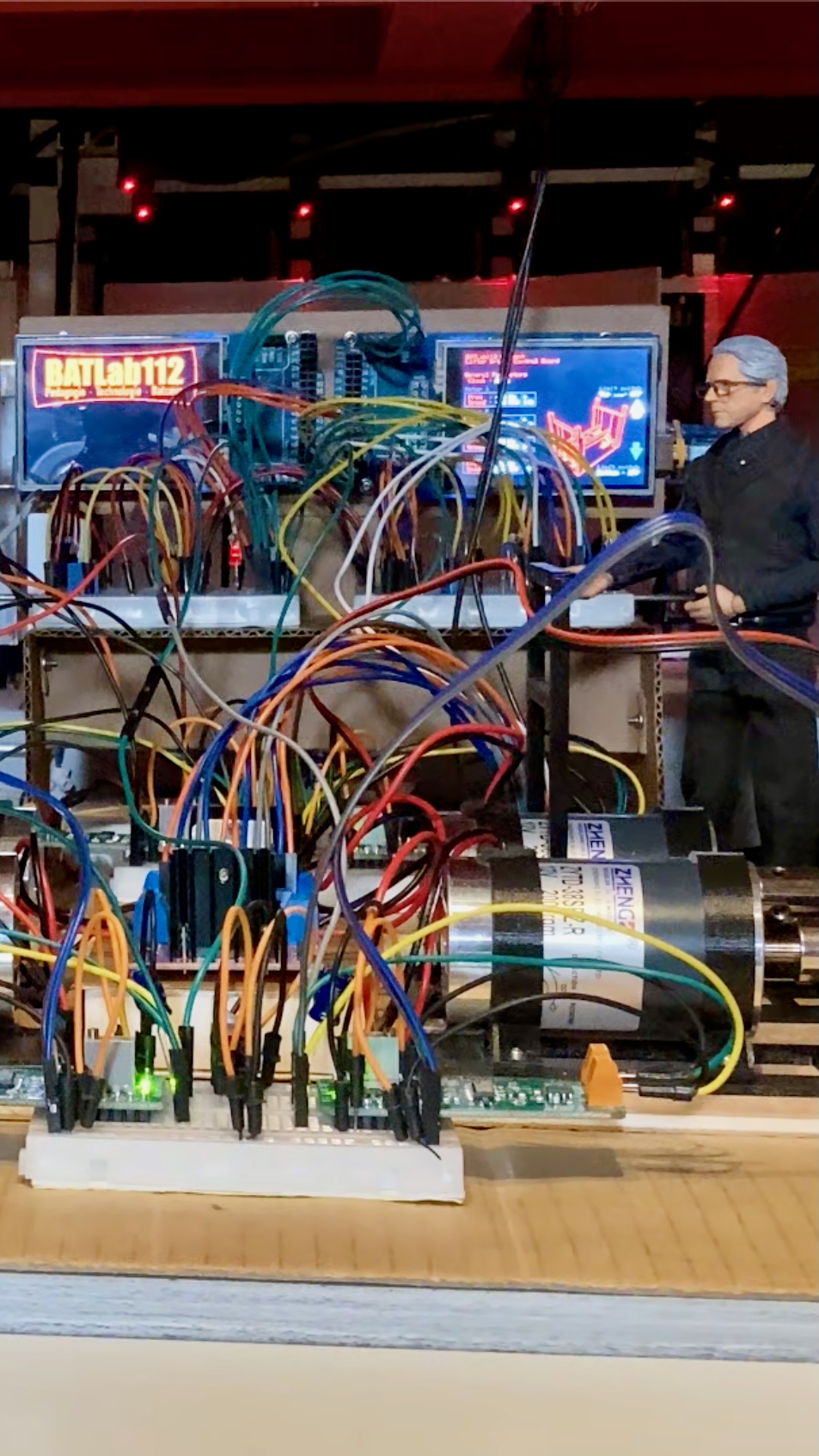
Fabrication d’une nouvelle partie du diorama de la Batcave : le laboratoire d’Alfred.
D’un point de vue pédagogique, ce laboratoire sera destiné aux présentations ludiques des évolutions en cours de développement du diorama avant leur intégration.
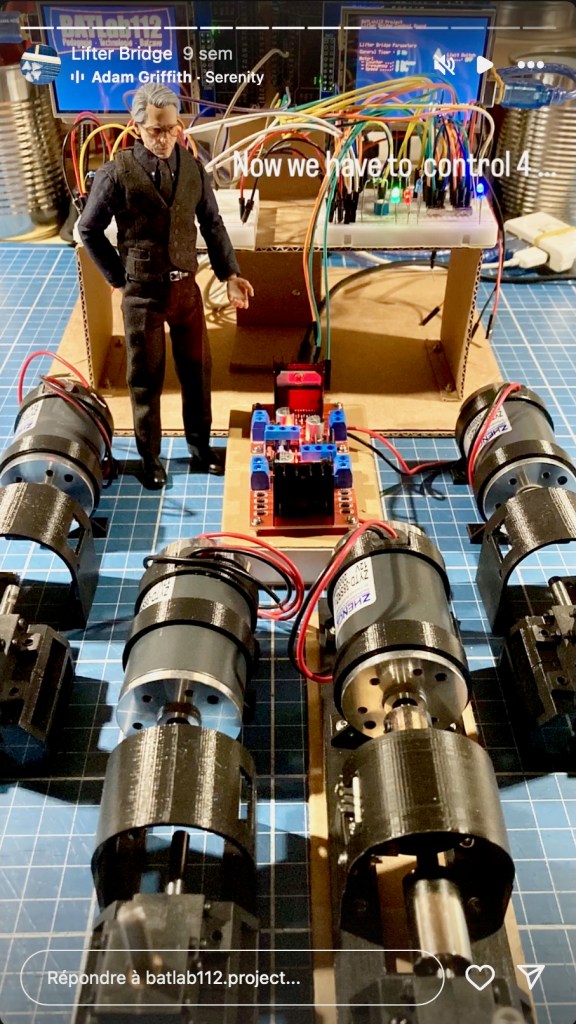
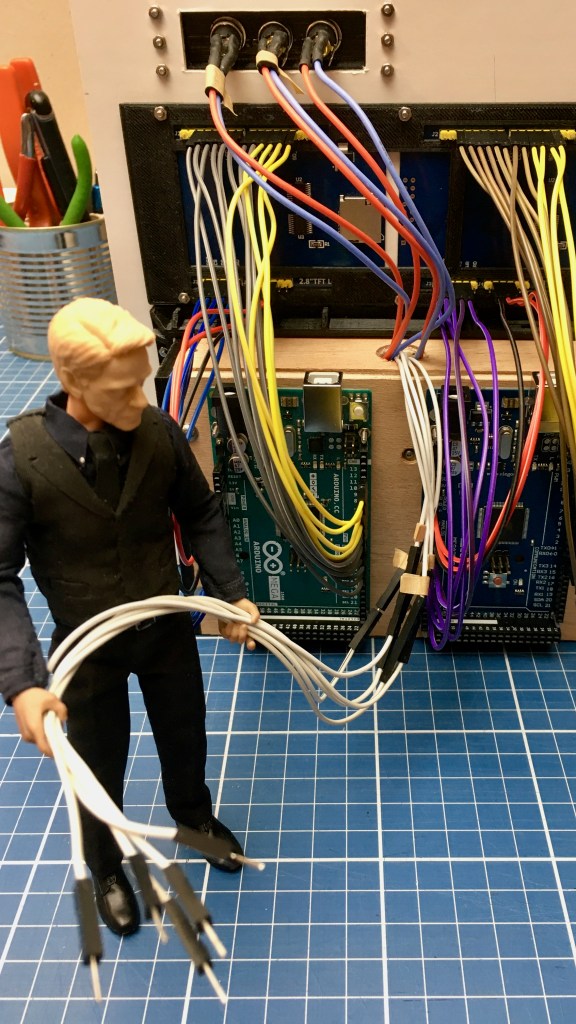
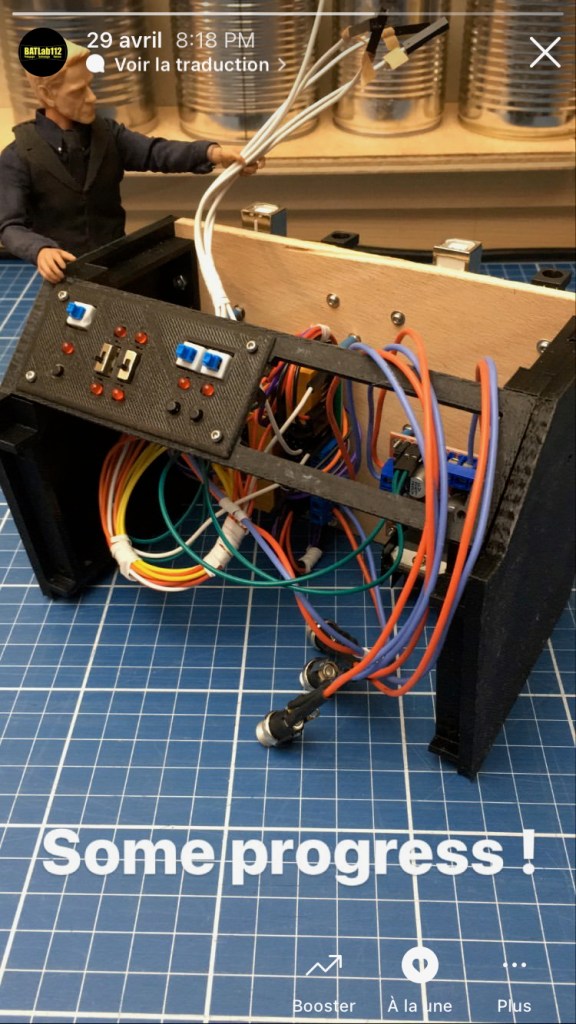
Après le test unitaire des commandes pour une plateforme moteur et le test électrique des 4 plateformes, la prochaine étape consiste à réaliser le câblage définitif.
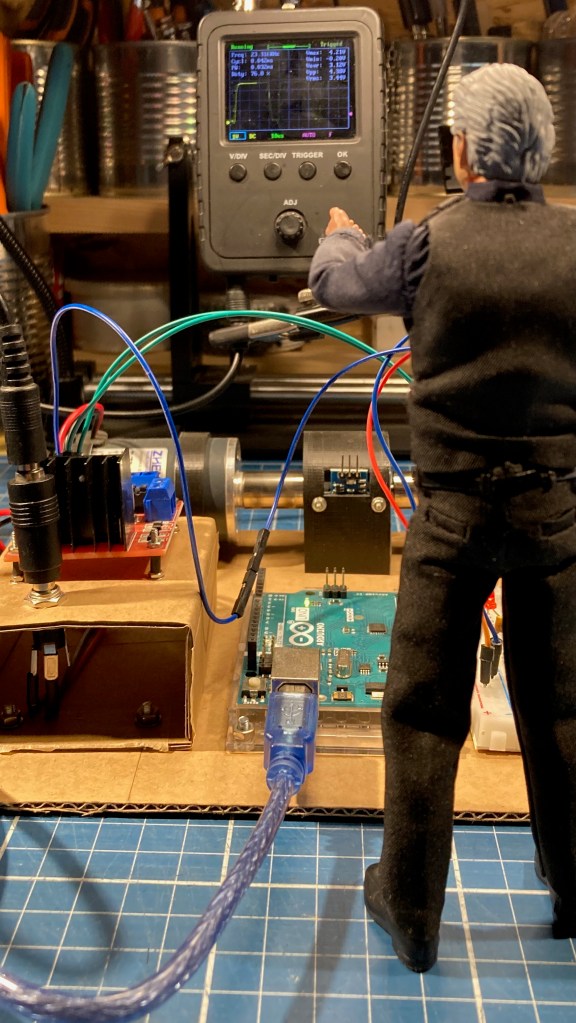
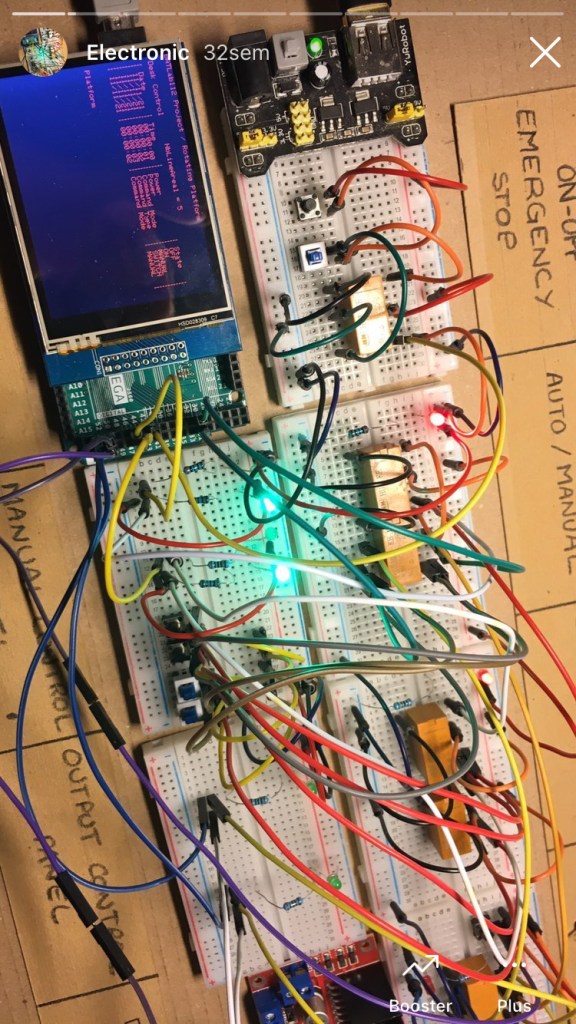
Test du prototypage du câblage des commandes manuelles et de l’affichage de la vitesse de rotation d’un des quatre moteurs d’entraînement du pont élévateur .
L’origine de ma réflexion concernant l’usage d’un diorama comme support pédagogique s’inscrit initialement dans une démarche centrée sur la commande de bras robotiques. Cette orientation répondait pleinement à mon objectif de renouer avec des disciplines telles que l’électronique, l’automatisme et la robotique. Elle s’articulait également avec l’intérêt croissant que je portais à la technologie Arduino. Ayant étudié, au cours de mon cursus, la programmation de microcontrôleurs et d’automates programmables, j’ai été particulièrement impressionné par la simplicité d’utilisation et le potentiel offert par les cartes Arduino.
Cette réflexion serait probablement demeurée au stade théorique — limitée à quelques esquisses conceptuelles et fichiers de modélisation 3D conçus sous FreeCAD — sans un événement déterminant pour la suite du projet : la réception, à titre de don, d’une carte Arduino Due. Ce geste a constitué un véritable catalyseur, me conduisant à passer de la conceptualisation à l’expérimentation concrète. J’ai ainsi entrepris de me familiariser avec l’environnement matériel et logiciel propre à cette carte, prélude au développement d’une première maquette de bras robotique pilotée par l’Arduino Due.
Malgré les imperfections inhérentes à cette première construction, cette maquette a constitué une étape décisive en rendant le projet tangible et dynamique. Elle a renforcé ma motivation à poursuivre son développement. Je suis pleinement conscient que cette avancée doit beaucoup à Rémi, membre de ma famille et généreux donateur de la carte, dont le geste a joué un rôle déterminant dans l’évolution du projet.
Quelques années plus tard, dans le cadre du développement du projet BATLab112, j’ai été amené à mobiliser d’autres modèles de cartes Arduino, parmi lesquels les cartes Uno et Mega, ainsi qu’un ensemble de modules complémentaires tels que des capteurs divers et des écrans tactiles. Le modèle de console de commande conçu pour piloter les différents systèmes du diorama à l’échelle 1/12 intègre notamment deux cartes Arduino Mega. Celles-ci assurent à la fois la gestion de l’affichage sur deux écrans tactiles et l’interprétation des commandes émises par l’utilisateur.