Cet article présente le premier prototype de l’électronique de commande du pont élévateur du diorama de la Batcave du projet BATLab112.… Lire la suite →
Première publication :
Dernière mise à jour :
Temps de ecture :
Mots clés :
Article précédent :
Introduction
Suite à la conception détaillée de l’électronique de commande du pont élévateur du diorama de la Batcave, l’objectif de ce prototype est de valider le principe de fonctionnement de cette électronique. Il s’agit dans un premier temps, de réaliser les prototypes des deux armoires électriques, contenant les montages électroniques de distribution de l’énergie électrique des moteurs et de mesures de leurs vitesses de rotation. Dans un deuxième temps, le câblage de ces armoires avec les plateformes moteurs et la console de commande, doit permettre de valider le fonctionnement global de ce système.
Pour plus d’infos :

Ce prototype ne présente pas encore un niveau de finition abouti, compatible avec les ambitions de réalisme d’un diorama. La structure interne des deux armoires électriques principales est apparente, ainsi que celles des plateformes moteurs. Le câblage est très expérimentale et la console de commande est seulement simulée par un affichage sommaire sur un écran, même si des modèles opérationnels fonctionnent déjà pour la plateforme rotative et le pont roulant.
Implantation du prototype

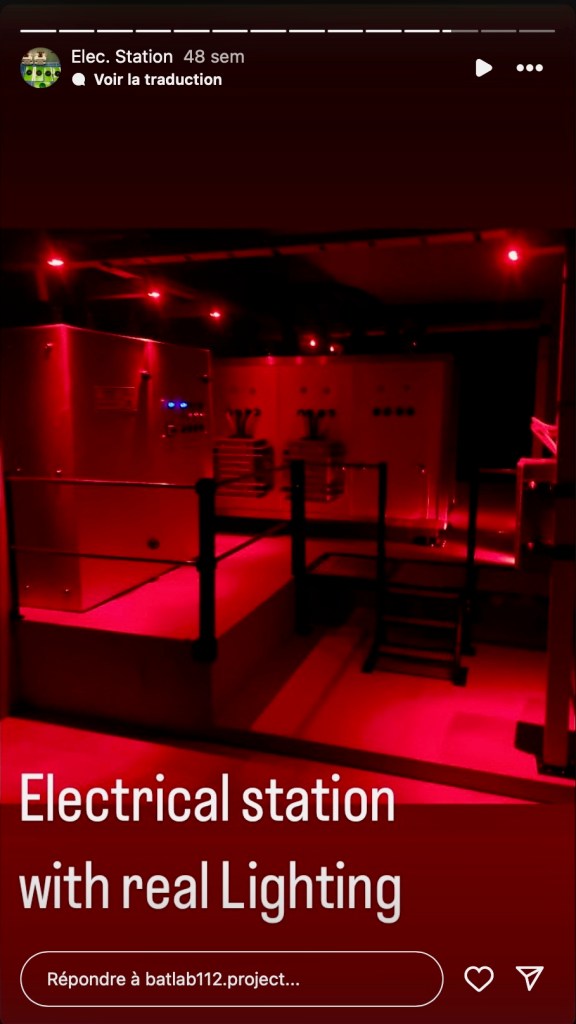
Initialement, ce prototype devait être mis en oeuvre en situation, au sein du diorama de la Batcave. L’intérêt premier était de bénéficier de la proximité du local électrique du diorama de la Batcave, pour alimenter en énergie électrique les différents sous-ensembles électroniques ; moteurs, armoires électriques … Le deuxième intérêt était de disposer de l’environnement opérationnel du diorama de la Batcave comme décor, dans les publications sur les réseaux sociaux faites sur l’avancement du projet.
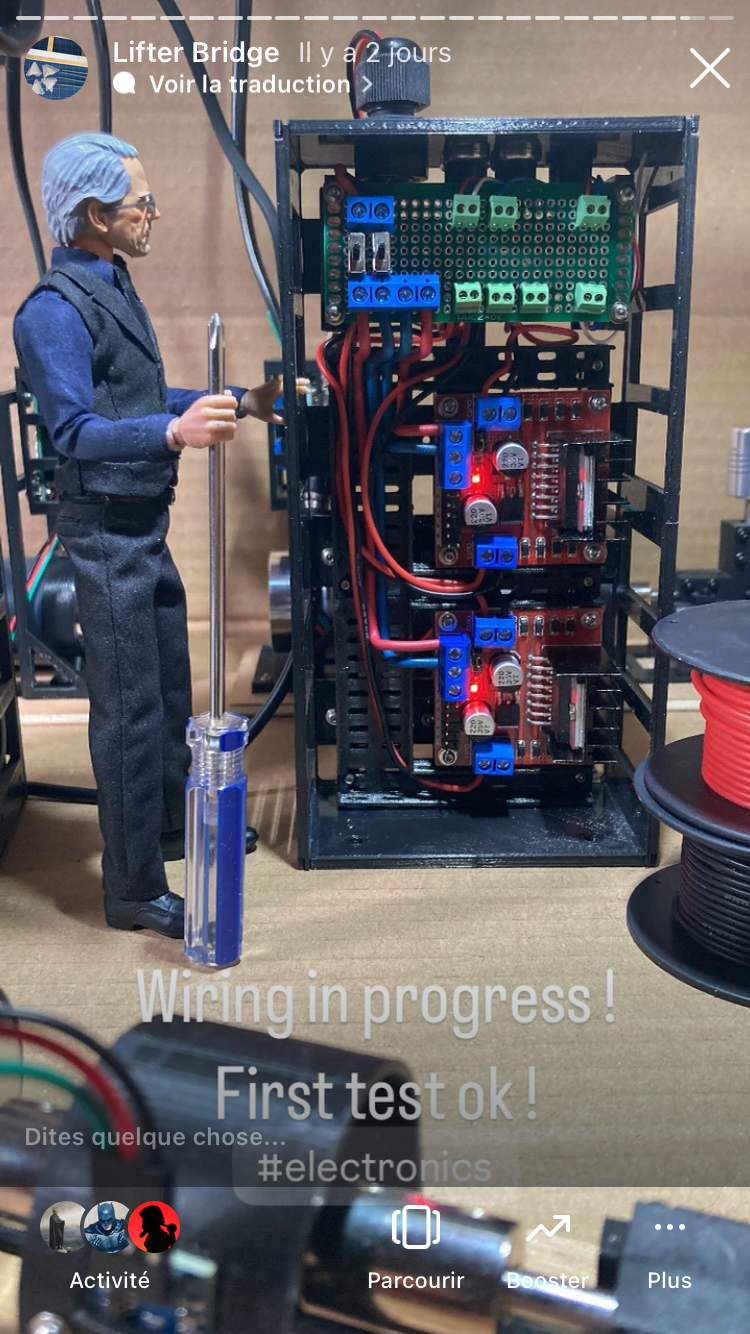
Finalement, le prototype de ce système électronique est réalisé à part du diorama de la Batcave. La manipulation des différents composants électriques et mécaniques est ainsi rendue plus aisée lors des différentes modifications opérées pendant la mise au point. Sa mise en oeuvre dans une enceinte en carton a notamment permis d’améliorer la gestion du câblage grâce aux tubes en aluminium, sans pour autant avoir eu besoin de concevoir et de fabriquer une structure mécanique spécifiques.
Cette enceinte en carton a aussi servi d’arrière plan dans les mises en scène des publications sur les réseaux sociaux, présentant l’avancement de ce système.



Pour plus d’infos :

Présentation générale
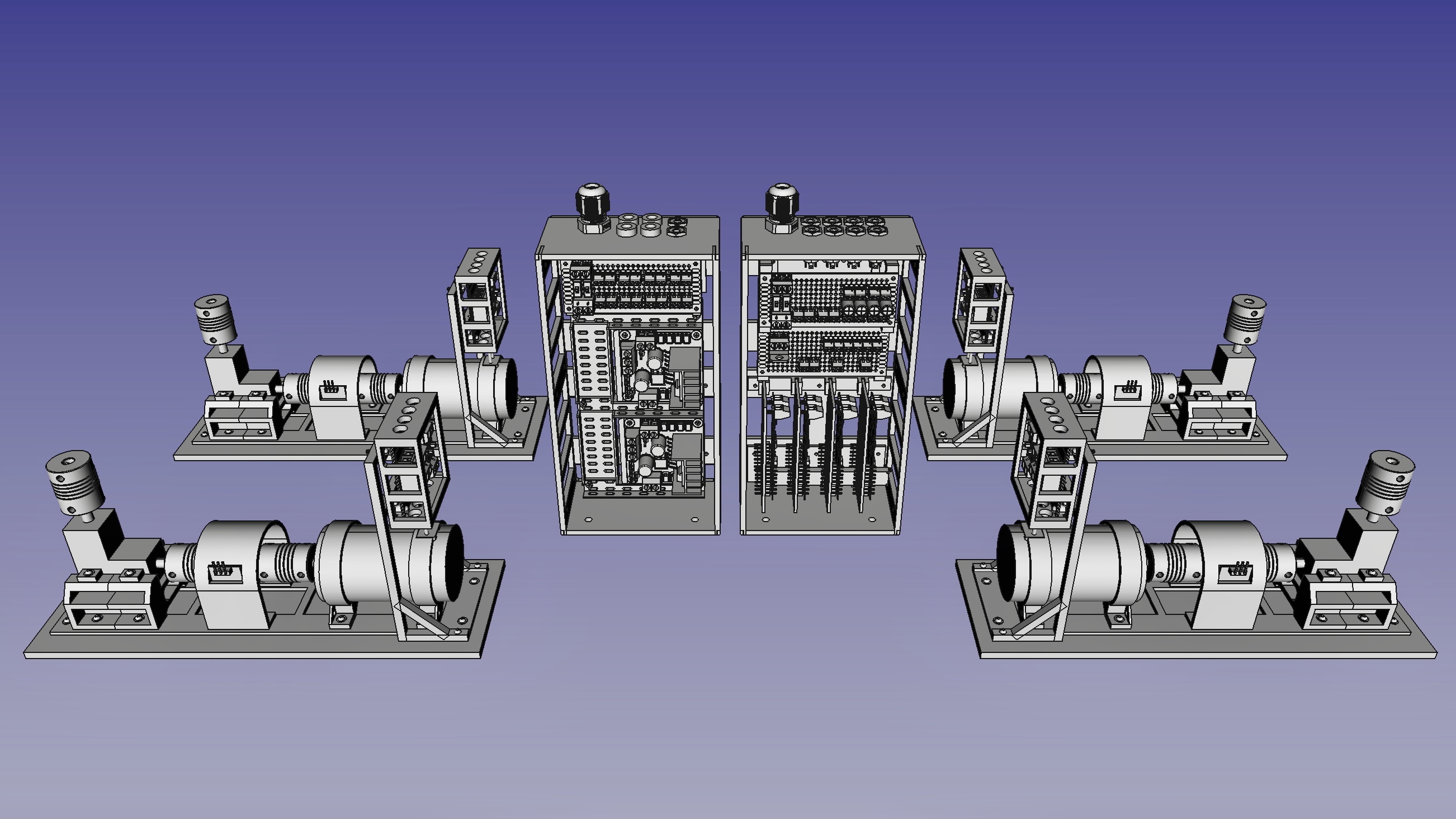
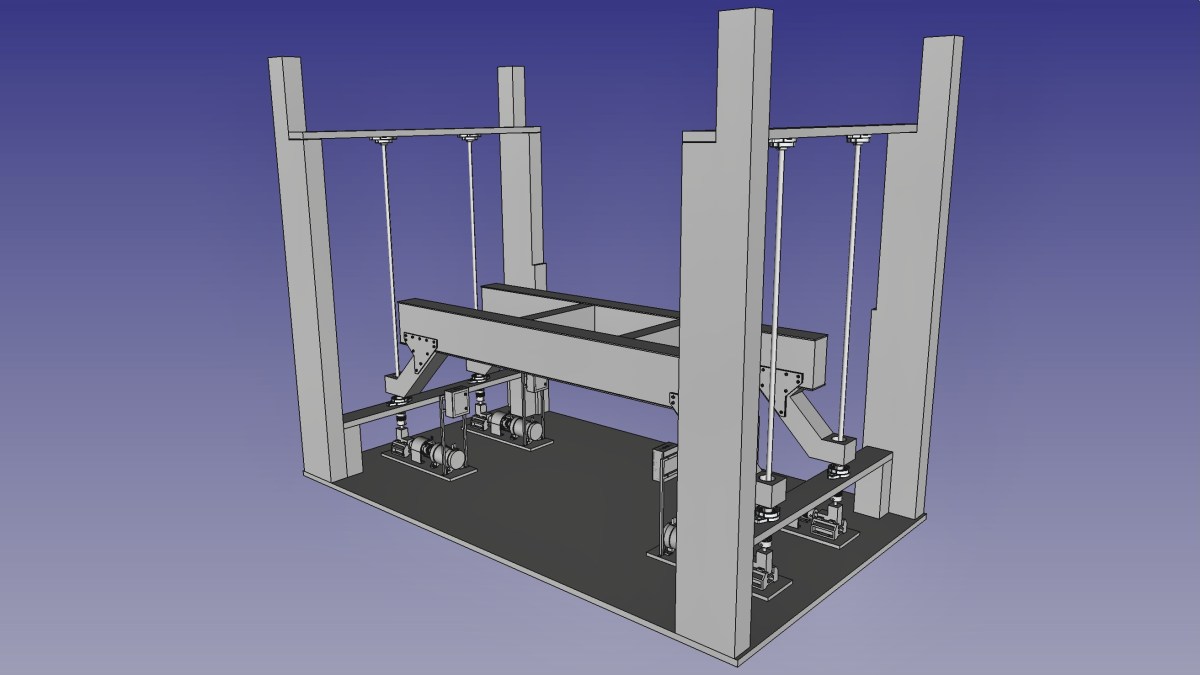
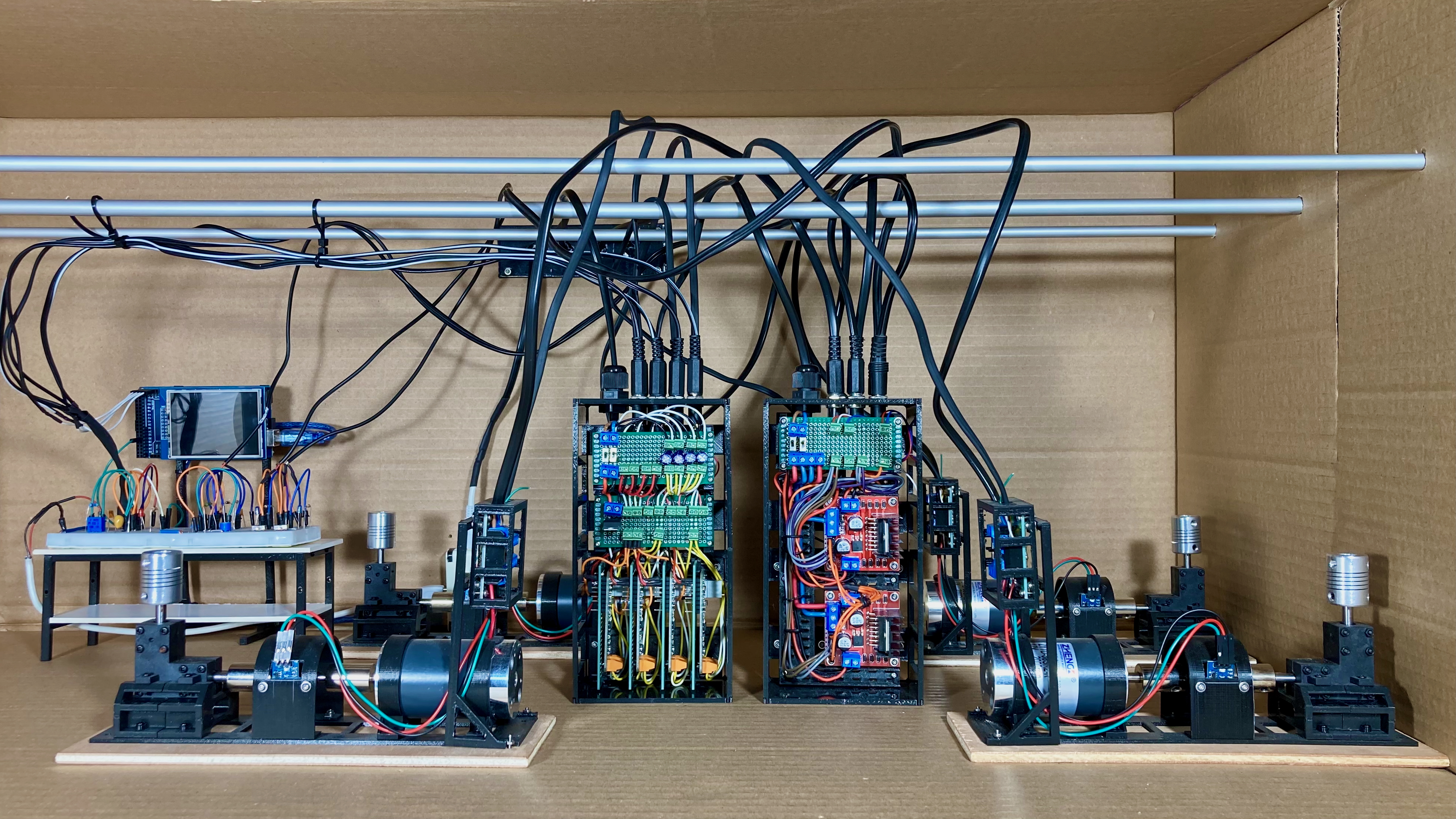
Cette vidéo présente les différents éléments physiques de ce système électronique. Chaque élément est une reproduction à l’échelle 1/12 d’éléments réels d’un système électromécanique capable d’actionner les quatre axes d’un pont élévateur, pour une charge équivalente à celle de la Batmobile réelle d’une masse d’environ 4 tonnes. Cependant, une reproduction de l’aspect visuel et du fonctionnement d’origine de ces éléments électromécaniques réels n’est pas envisageable à cause des contraintes techniques induites par l’utilisation de technologies électroniques. Pour autant, l’architecture de ce système à l’échelle 1/12, le profil de chaque élément ainsi que leurs modes de fonctionnement restent très réaliste.
Quelques détails
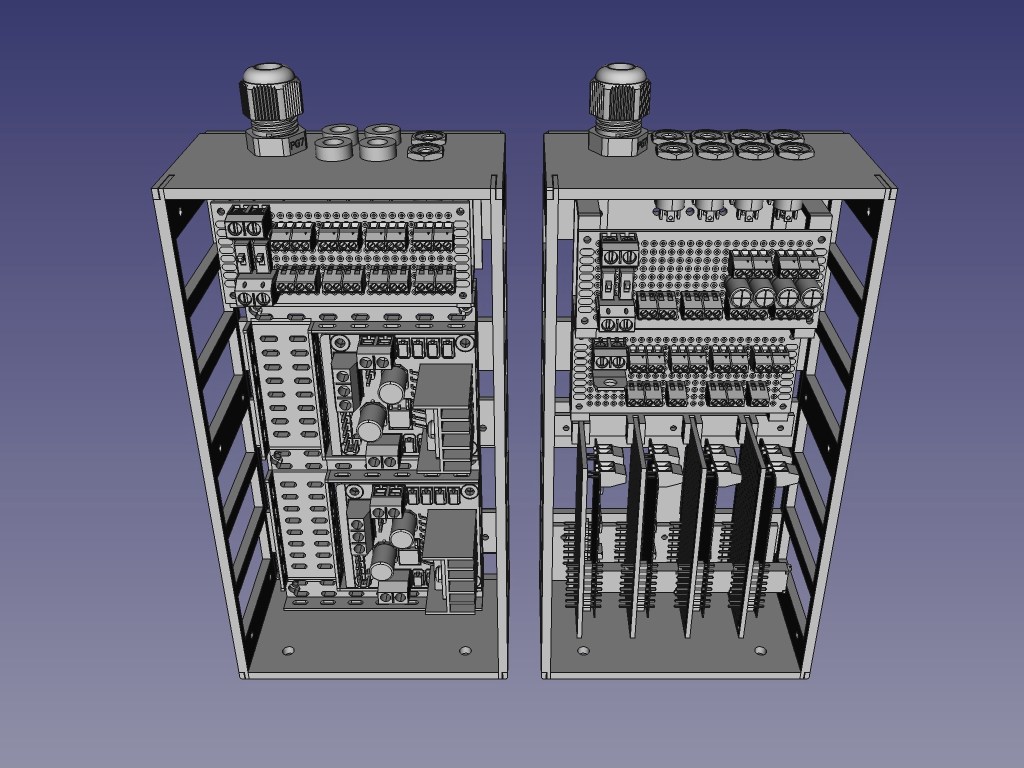
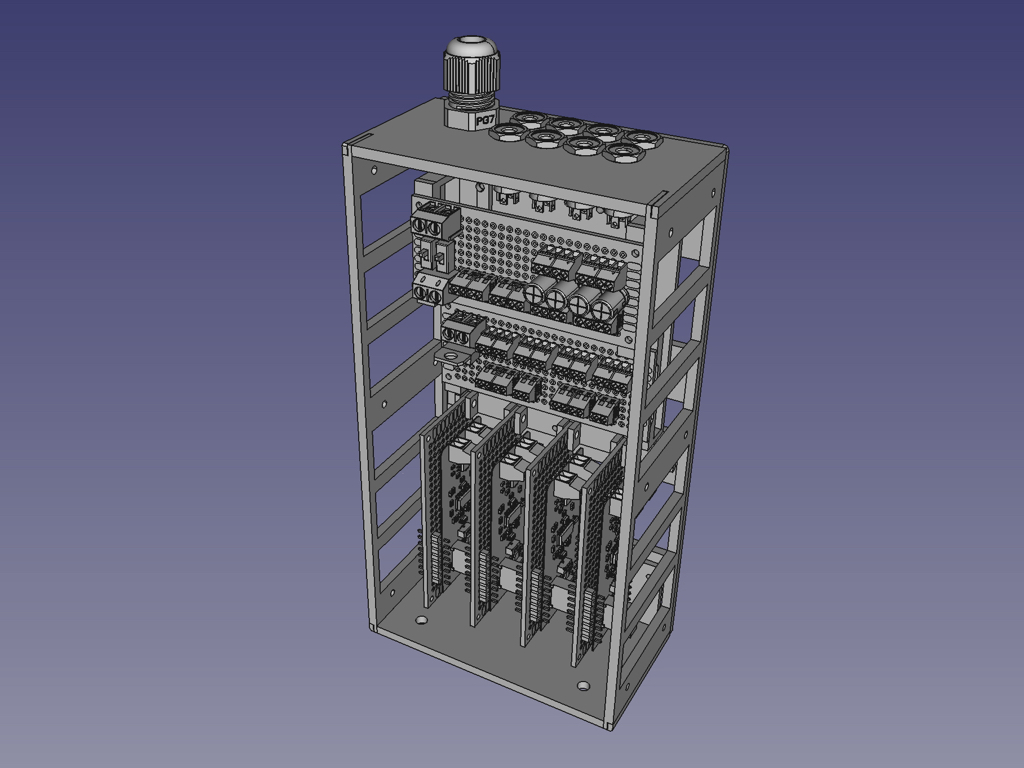
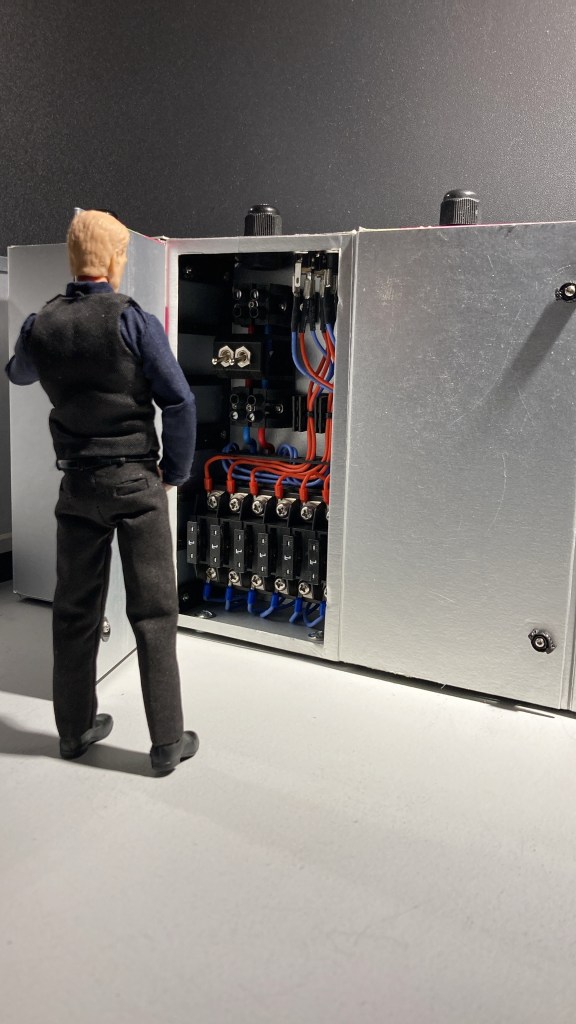
Les armoires électriques

L’armoire électrique de gauche contient l’électronique de mesure de la fréquence de rotation des 4 moteurs, dont 4 cartes PCB manufacturées convertisseur de fréquence en tension.
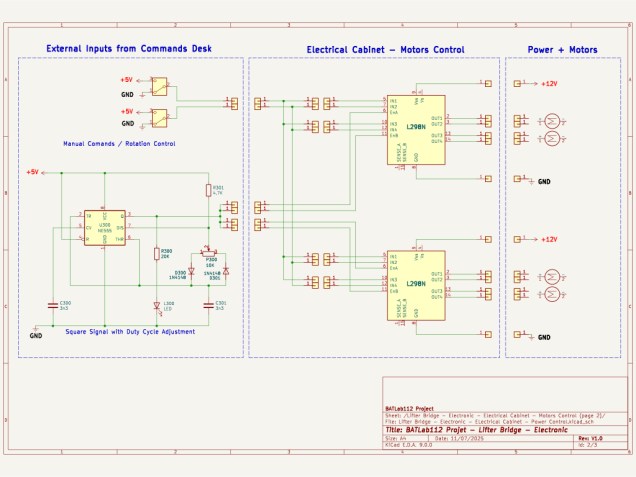
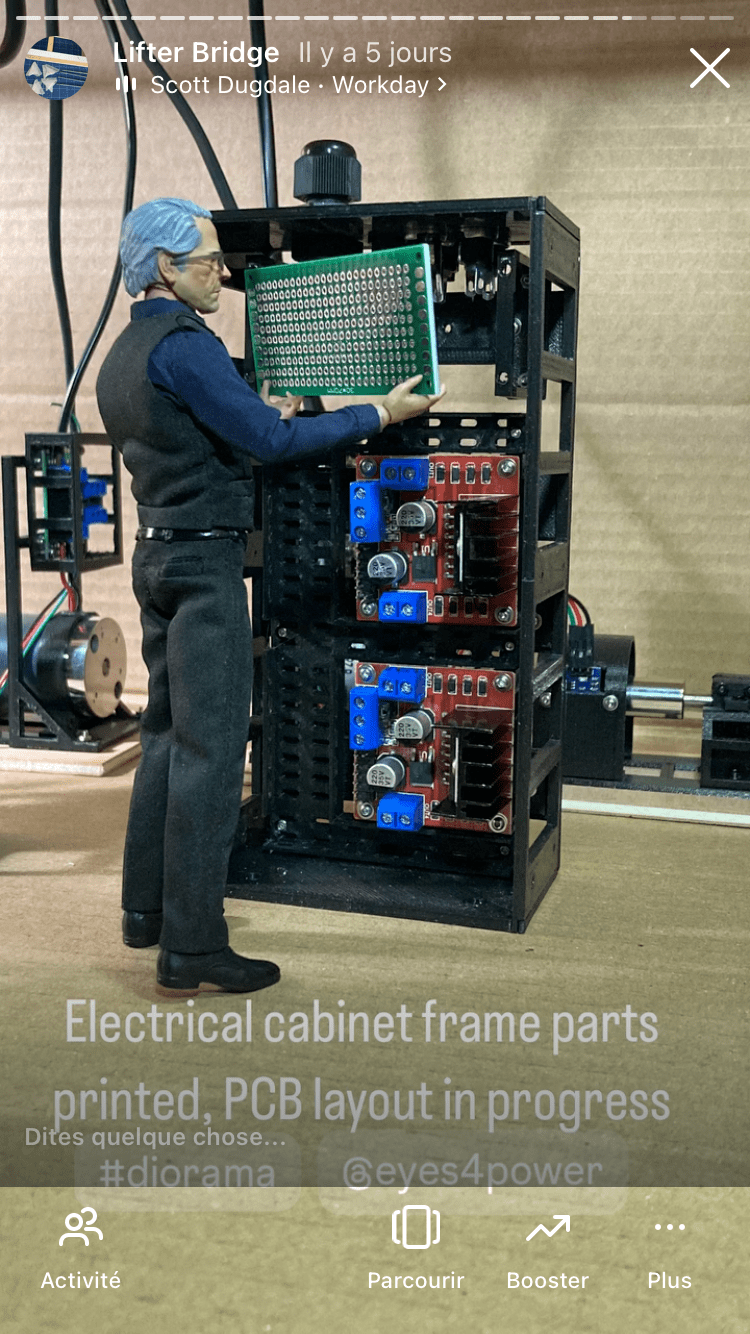
L’armoire électrique de droite contient l’électronique de distribution de l’énergie électrique vers les 4 moteurs, dont 2 cartes PCB manufacturées d’un double Pont en H.
Les structures de ces deux armoires électriques sont toutes les deux identiques aux modèles opérationnels développés pour le poste électrique du diorama. Elles sont fabriquées par impression 3D ainsi que tous les supports internes de PCB et les chemin de câbles.
Pour plus d’infos :

Poste électrique du diorama de la Batcave – Réalisation du modèle opérationnel de distribution électrique à l’échelle 1/12
Cet article présente le premier modèle opérationnel du local électrique à l’échelle…
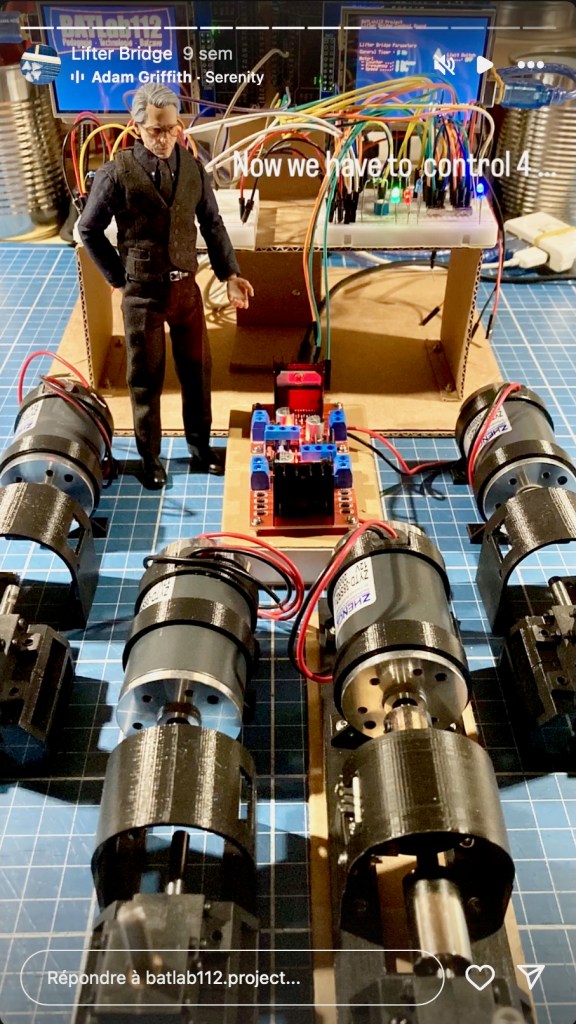
Les plateformes moteurs

Les prototypes de 4 plateformes moteurs d’entrainement des 4 axes verticaux du pont élévateur ont été précédemment réalisés et testés mécaniquement et électriquement, mais sans être couplés avec les axes du pont élévateurs.
Pour plus d’infos :

Pont élévateur – Prototype – Plateforme moteur
Cet article présente le premier prototype des plateformes de motorisation des axes du pont…
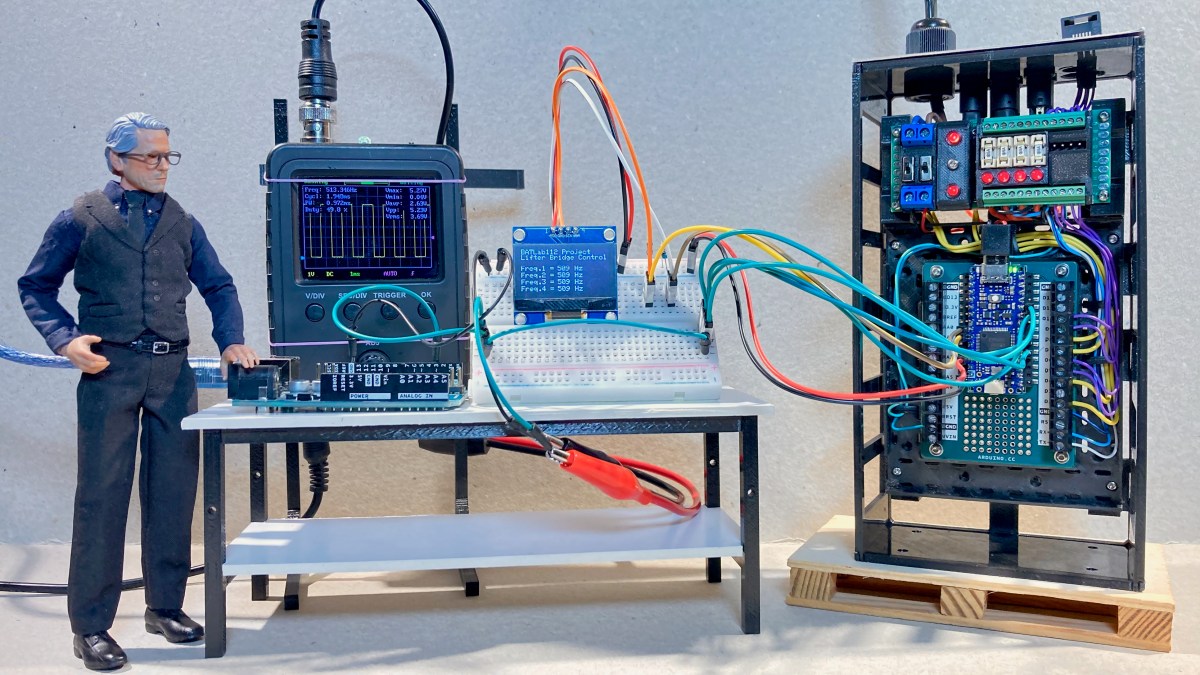
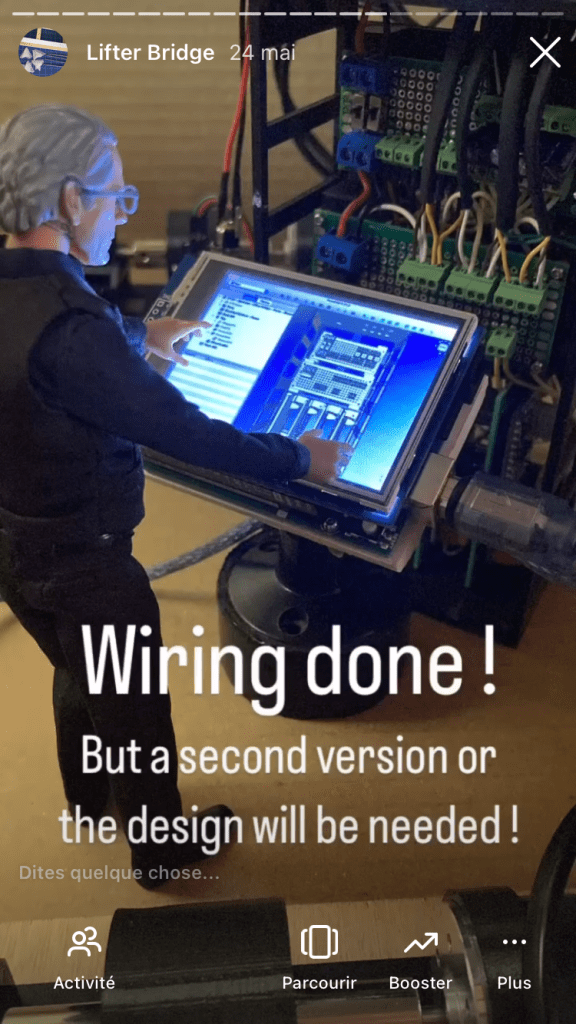
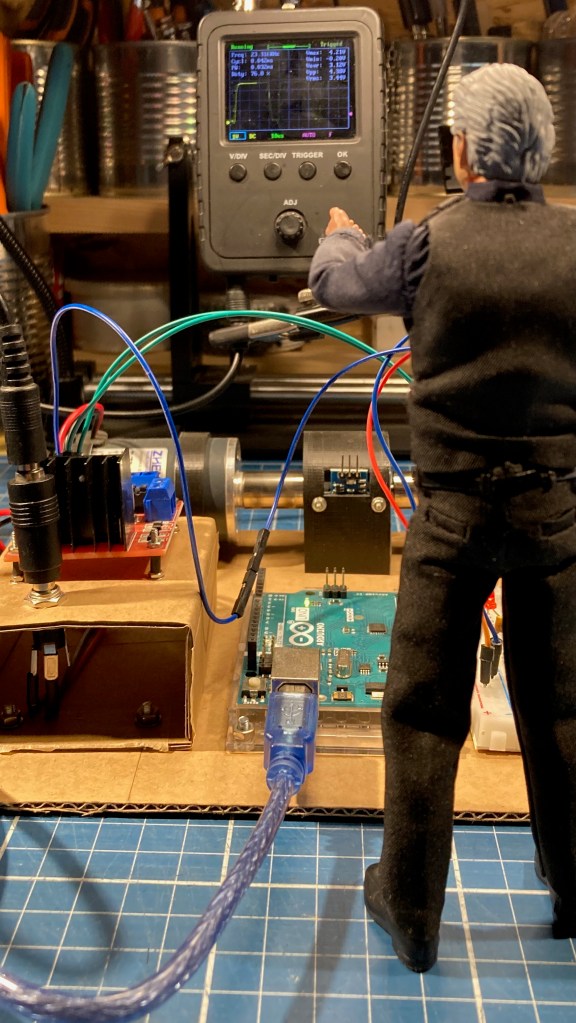
La console de commandes

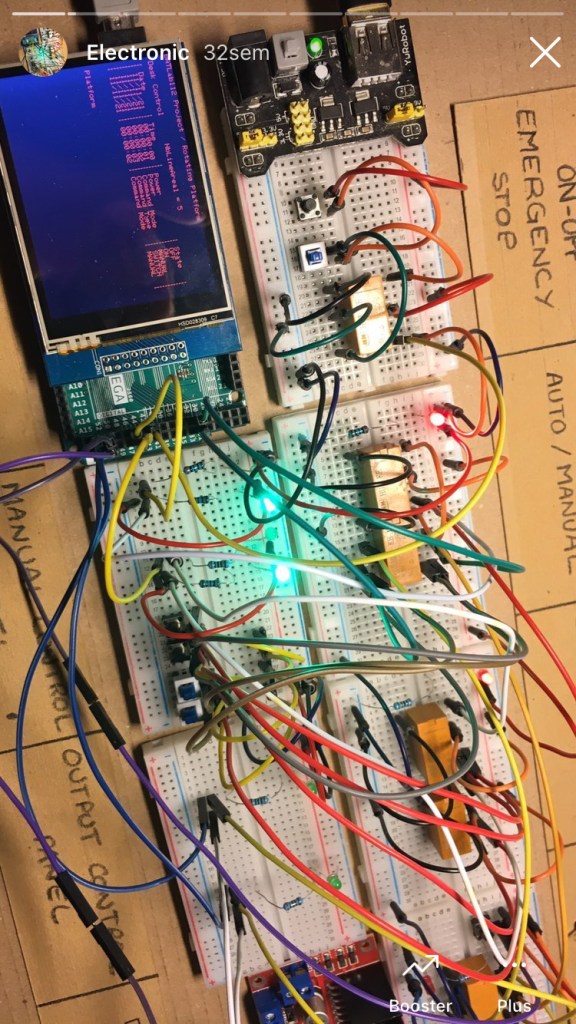
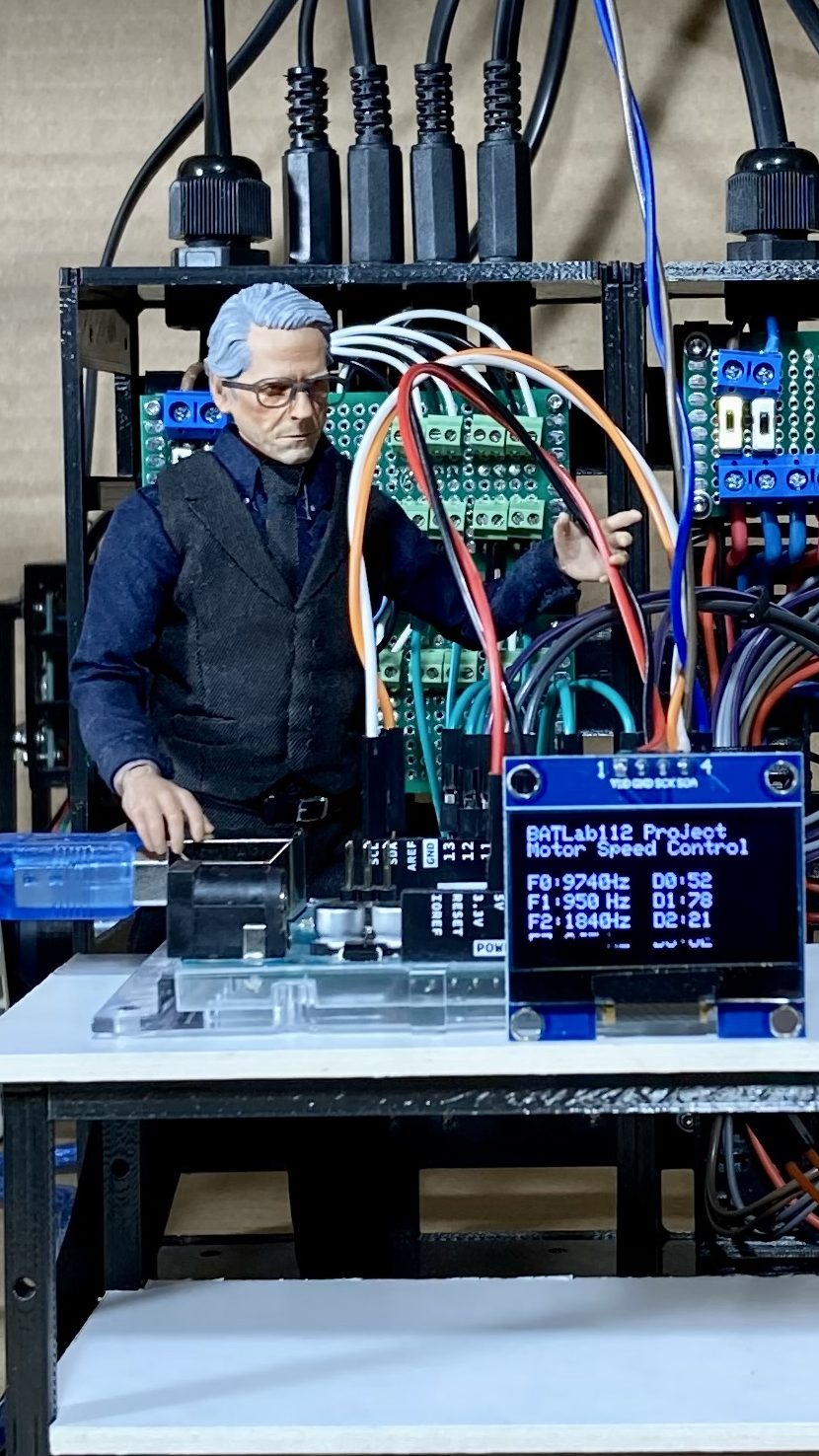
La console de commande est réduite à une simple maquette électronique et d’une carte Arduino Mega, équipée d’un écran 2,8″. La partie gauche de la plaque de prototypage supporte le montage électronique d’un générateur de signal carré, cadencé à une fréquence de 2Hz, servant de signal d’horloge pour l’échantillonnage des mesures et de leurs affichages. La partie de droite, supporte deux switches pour piloter le sens de rotation des moteurs, ainsi que le montage électronique d’un générateur de signal carré, dont la variation du rapport cyclique commande la variation de vitesse de rotation.
Pour plus d’infos :

Console de commande – Modèle 1
Ce premier modèle opérationnel de la console de commande permettant de piloter les équipements…
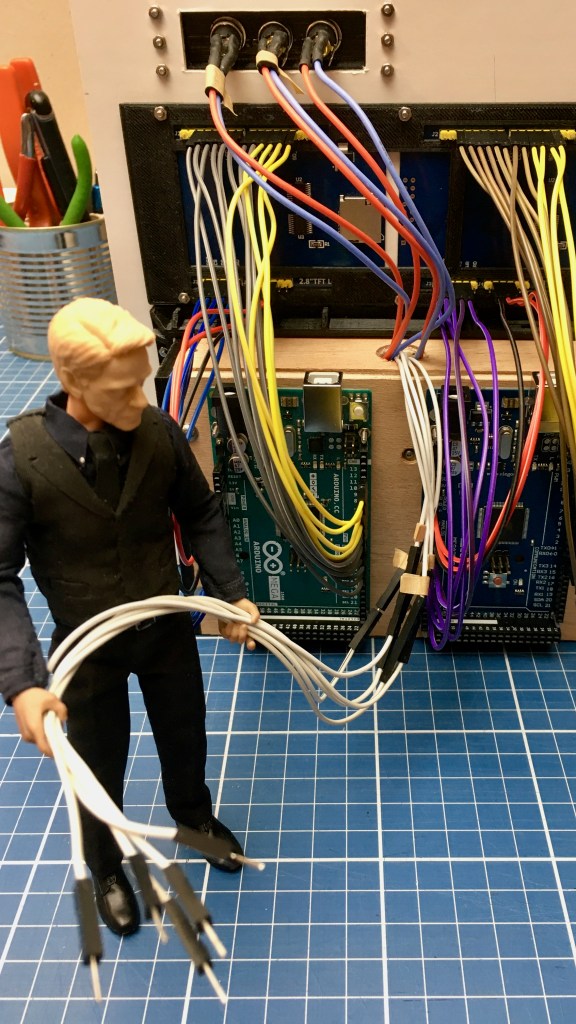
Le câblage

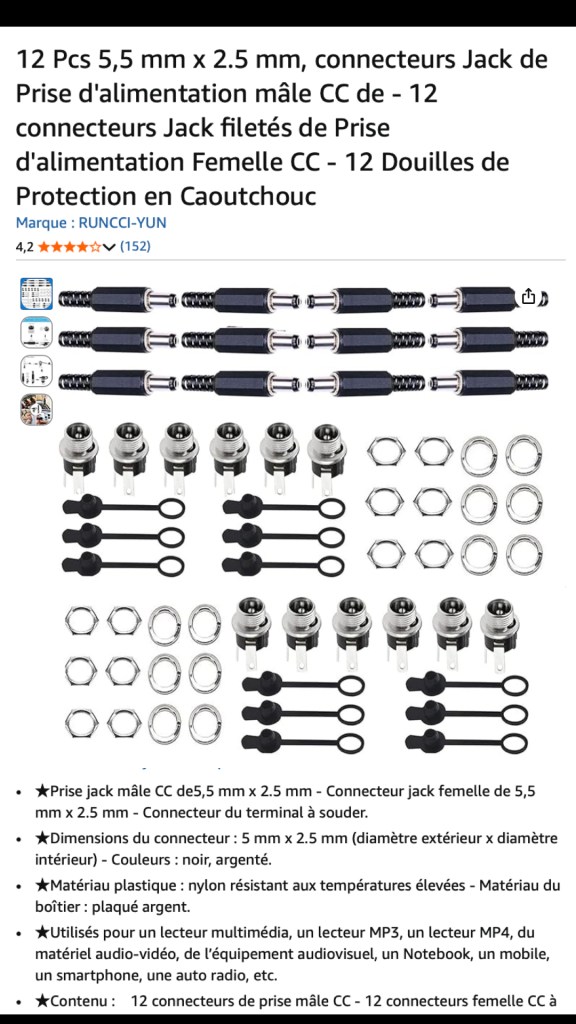
Le câblage est très expérimentale. Il n’a fait l’objet d’aucune conception en amont. Le câblage est réalisé à partir de câbles électriques issus de récupération, équipés de connecteurs de type Jack Audio 3,5 mm.
L’aspect expérimentale se justifie par le fait qu’il est toujours difficile d’anticiper le volume occupé par les câbles particulièrement en interne des armoires. Modéliser ce câblage lors de la phase de conception serait très chronophage. De plus, la modélisation du câblage aurait imposée de modéliser la structure supportant le câblage, ce qui aurait encore ajouter à l’aspect chronophage de cette tâche.
Pour + d’infos :
Poste électrique du diorama de la Batcave – Réalisation du modèle opérationnel de distribution électrique à l’échelle 1/12
Cet article présente le premier modèle opérationnel du local électrique à l’échelle 1/12 du…
Fonctionnement général
La vidéo présente le principe de fonctionnement général de ce système électronique. Elle met en évidence la commande du sens de rotation des 4 moteurs, par l’intermédiaire de la combinaison des deux switches de la console de commande, ainsi que des PCB des doubles Ponts en H installés dans l’armoire électrique de contrôle de l’alimentation électrique des moteurs. La vidéo présente aussi la relation entre le rapport cyclique du signal carré issu de la console de commandes et la vitesse de rotation des moteurs.
Vue d’ensemble du prototype en fonctionnement
Analyse critique du résultat obtenu
Le fonctionnement général du système électronique, de commandes et de mesures de la fréquence de rotation des moteurs du pont élévateur, tel qu’il a été conçu, est opérationnel. Cependant, il reste des points d’amélioration importants tant sur le plan fonctionnel que sur le plan esthétique.
Esthétique finale des connecteurs des PCB

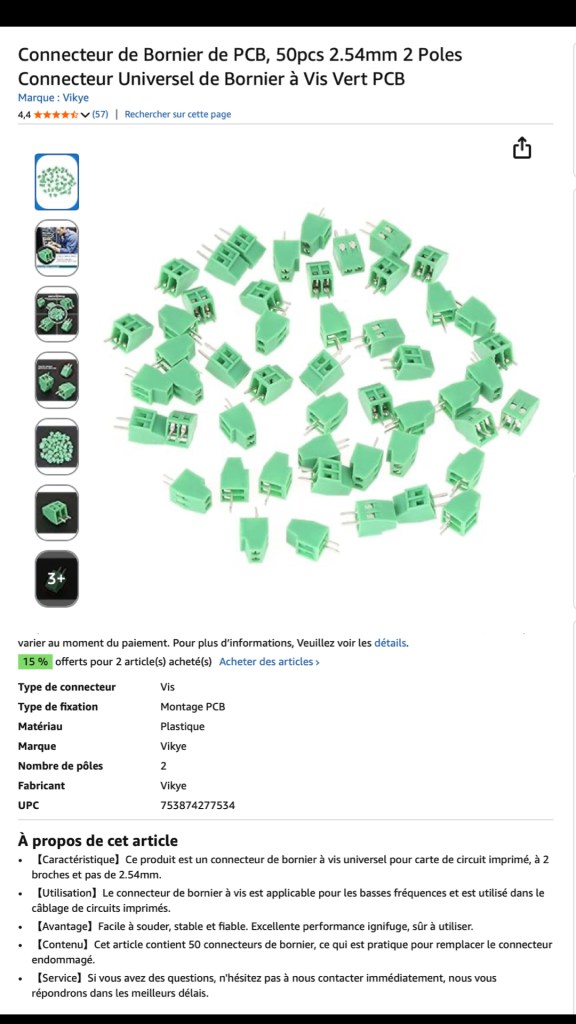
Sur le plan esthétique, au-delà de l’absence d’habillage des armoires électriques qui fera l’objet d’une mise en oeuvre ultérieure, les PCB supportant les fonctions de bornier de raccordement dans les deux armoires électriques, ainsi que le câblage interne de l’armoire électrique de mesure, présentes des stigmates de leur manipulation intensive lors de la phase de mise ou point. Ces PCB utilisent des connecteurs de petite taille, ne leur permettant pas de proposer un boitier mécanique suffisamment robuste pour encaisser les torsions induites par l’action des tournevis sur les vis.
Ce type d’inconvénient a déjà été rencontrés pour les connecteurs des PCB contenus dans les armoires de raccordement électrique des plateformes moteurs. Des pièces fabriquées par impression 3D ont alors permis de solidariser plusieurs connecteurs entre eux, améliorant ainsi leur rigidité mais aussi leur esthétique générale pour tendre vers un rendu plus réaliste.
Esthétique finale du câblage interne des armoires électriques
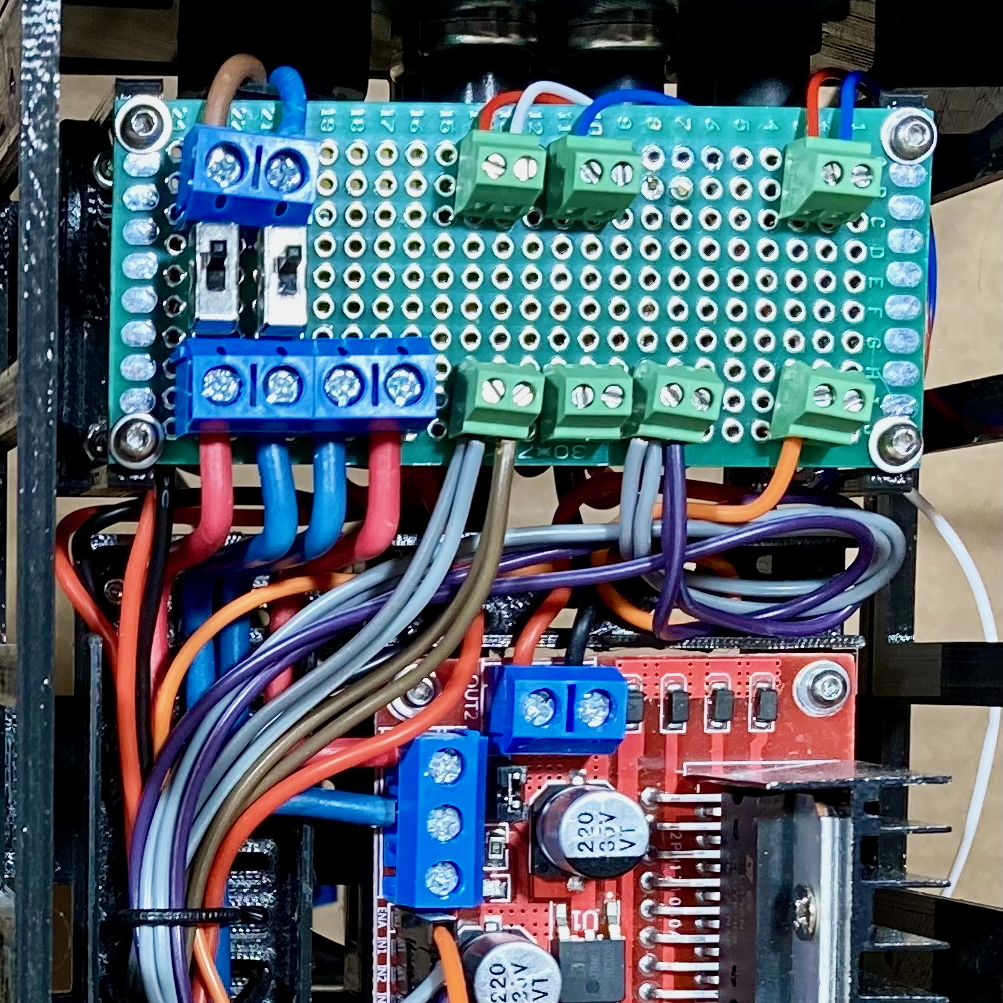
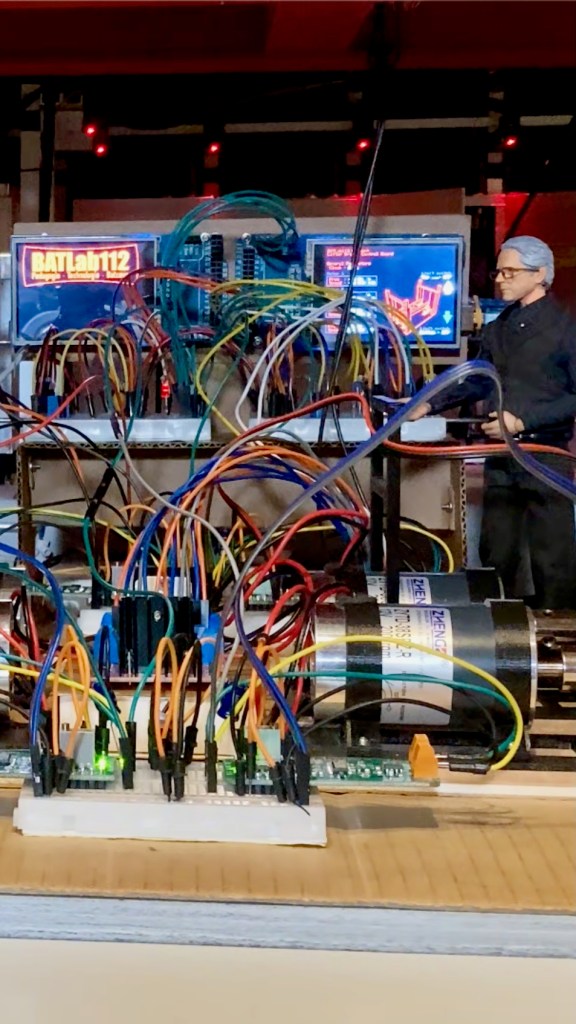
Si l’aspect du câblage externe des armoires électriques parait si anarchique (voir Photo extrait n°004), c’est la conséquence directe d’une part d’une absence préalable de conception et d’autre part d’une démarche expérimentale dans sa mise en oeuvre afin de tester différents types de connecteurs.
Par contre l’encombrement du câblage interne des armoires électriques a visiblement était sous dimensionné dans la phase de conception. Ce défaut est amplifié par un sous dimensionnement de la fonction de bornier des PCB spécifiquement conçus pour cela.
Sur le plan fonctionnel, ce prototype permet de mettre en évidence les limites techniques des quatre convertisseurs de fréquences en tension, utilisé dans l’armoire électrique n°1, pour servir d’interface entre les plateformes moteurs et la console de commandes. Même si le besoin n’est pas d’obtenir une valeur reflétant précisément une fréquence de rotation, pour autant il est important que chaque évolution de la vitesse de rotation de chaque moteur puisse être décelée pour éviter un blocage du pont élévateur. Les fréquences relativement basses de rotation des moteurs (inférieure à 500Hz) induisent des variations de tensions en sorties des convertisseurs, inférieurs à 50 mV. L’électronique d’acquisition, de transmission et de traitement de ces signaux de faibles amplitudes, induit des taux d’erreur trop important pour considérer son fonctionnement comme suffisamment fiable pour prévenir un blocage du pont élévateur.
Par conséquent, ces PCB de conversions des signaux de fréquences en tension doivent être remplacés par d’autres dispositifs, avec un impact le plus réduit possible, sur la conception générale du système électronique global.
Conclusions
Compte tenu de l’analyse précédente, et de la préparation de l’intégration de ce système dans le diorama de la Batcave, des modifications doivent être apportées sur certains éléments.
Remplacer les modules convertisseurs de fréquences en tension
Cette action est certainement la plus déterminante des modifications à apporter. L’objectif est de proposer des modules dont l’évolution de l’amplitude des signaux de tension en sortie soit significative pour en obtenir des mesures fiables. La solution consistant à concevoir, puis réaliser des PCB sur mesure convertisseur de fréquence en tension, a déjà été écartée depuis la conception détaillée de ce système électronique, pour des raisons de temps et de qualité de réalisation. Il reste donc deux pistes de réflexion à l’étude. La première consiste à reprendre une phase de recherche de PCB manufacturés plus adaptés aux fréquences du système. La deuxième consiste à remplacer les PCB dédiés à cette fonction par des éléments plus génériques mais programmables, comme par exemple des cartes Arduino.
Quelque soit la solution de remplacement qui sera choisie, il parait incontournable de prévoir aussi une modification des PCB servant de Bornier de raccordement électrique de ces modules dans l’armoire électrique concernée.
Une phase de conception complémentaire doit être mise en oeuvre pour cela.
Améliorer la présentation esthétique des PCB borniers
La solution a déjà été évoquée et mise en oeuvre dans les armoires de raccordement électrique des plateformes moteurs. Il s’agit de concevoir et d’imprimer en 3D des pièces reproduisant la fonction de sabot de charpente. Ces pièces permettent tout d’abord un regroupement visuel de plusieurs composants électroniques, sous ensembles d’une même fonction. De plus, ces pièces assurent une meilleure rigidité mécanique de l’ensemble qu’elles forment avec les connecteurs et évitent ainsi les déformations liées à la torsion de l’action du tournevis sur les vis de serrage.
Une phase de conception complémentaire doit être mise en oeuvre pour cela.