Cet article présente la réalisation du modèle opérationnel de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
L’intégration du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la l’intégration du pont élévateur. Voir l’article …
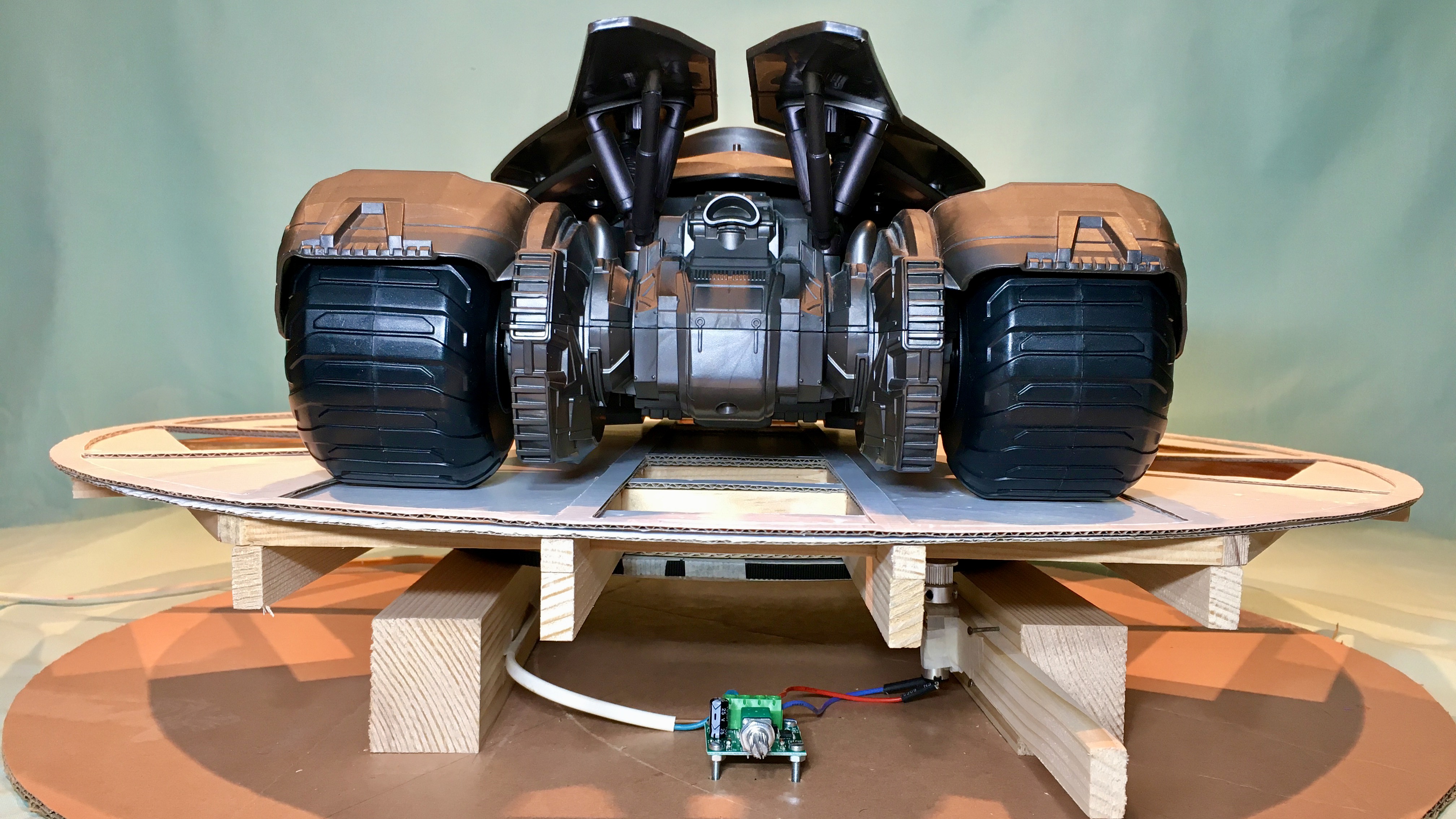
Ce modèle opérationnel de la plateforme rotative de la Batmobile est réalisé à partir du prototype. Le plateau de la plateforme est repris et peint. La transmission mécanique de la rotation est modifiée pour s’adapter sur le pont élévateur.
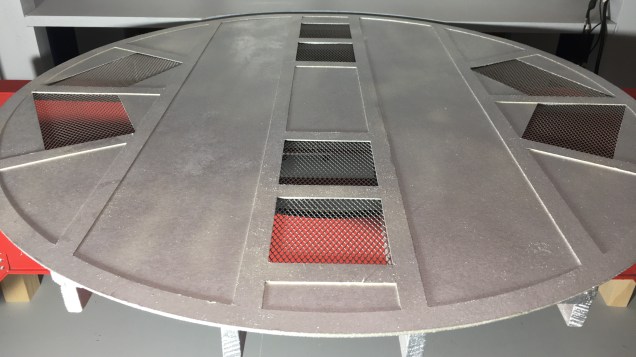
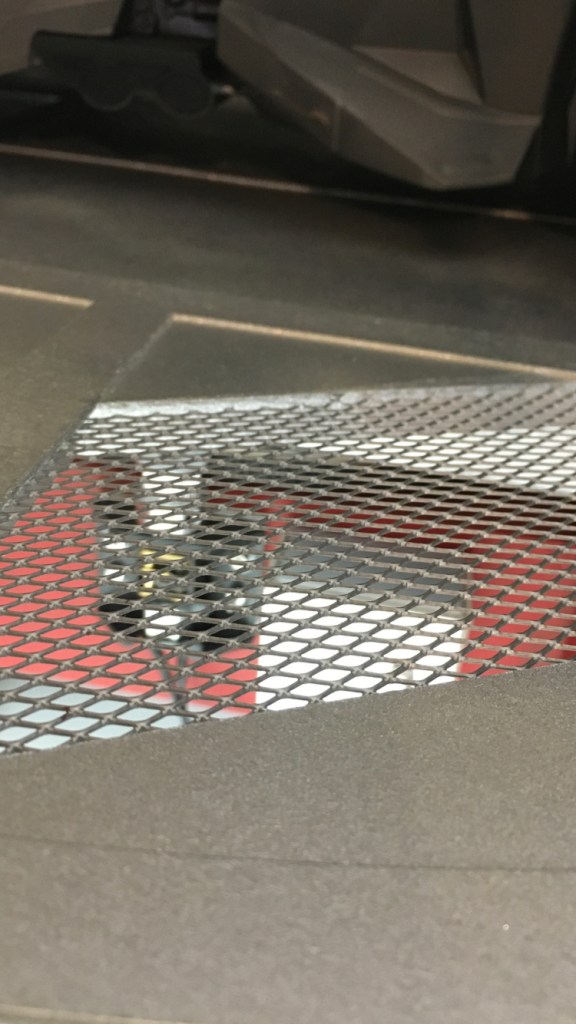
La structure en bois de la première version de la plateforme rotative a été reprise et poncée pour présenter deux surfaces parfaitement planes et être ensuite peintes (Photo N°1). Un nouveau plateau de la plateforme a été réalisé puis peint aussi de couleur gris métallique pour un rendu plus réaliste. L’assemblage de ce plateau sur le roulement à bille de transmission de la rotation est réalisé par quatre pions de positionnements (Photo N°2). Les ouïes du plateau ont été équipées de grilles collées par dessous (Photos N°3 & 4).
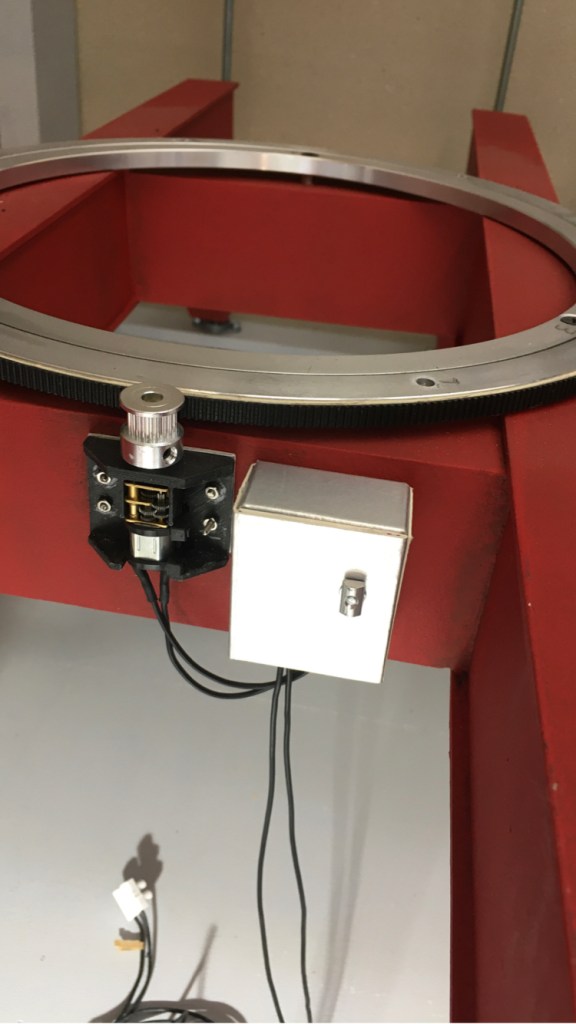
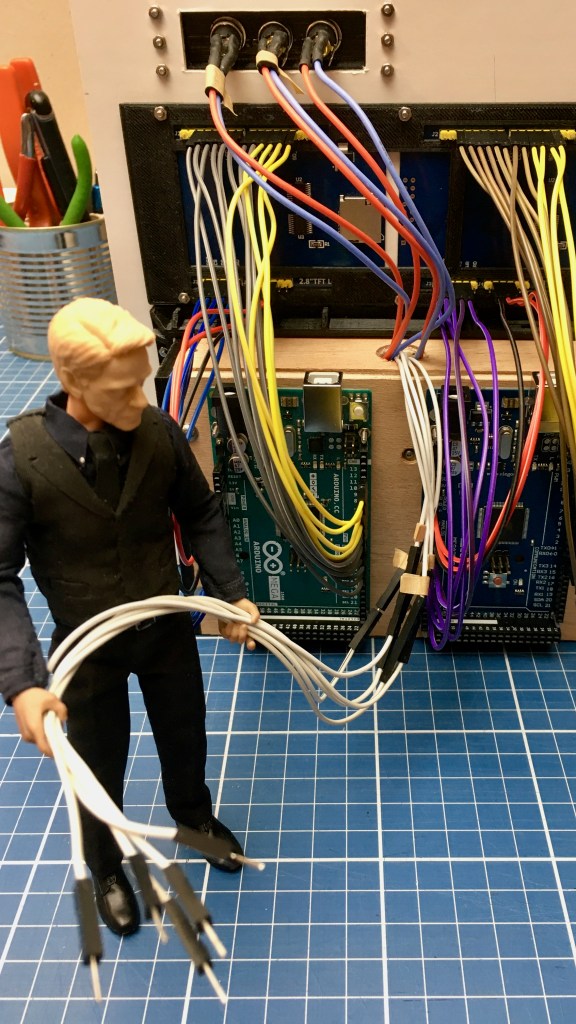
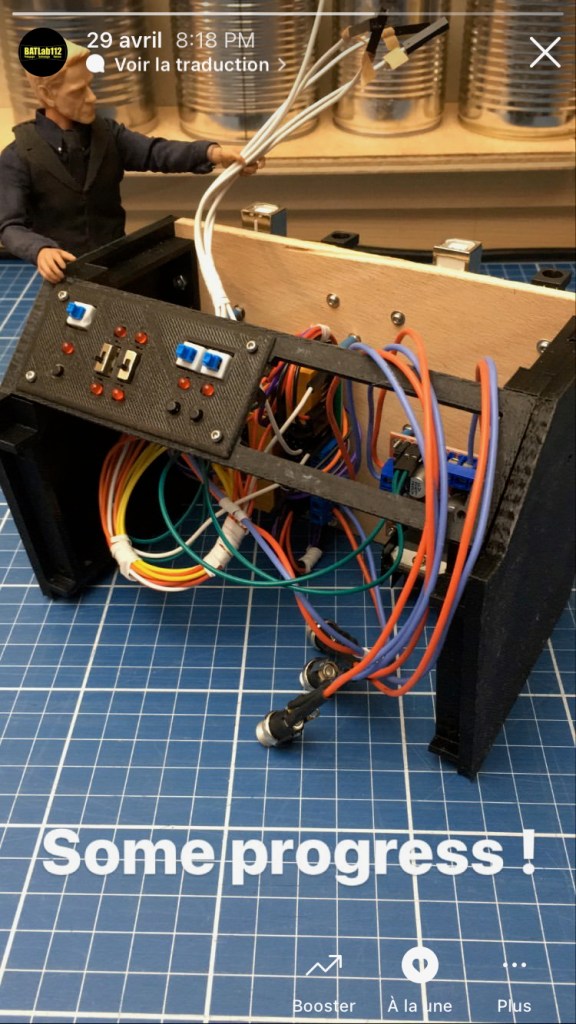
La motorisation et la transmission ont été particulièrement améliorées. Le design de la pièce de fixation du moteur a été modifié. Une armoire de câblage électrique permet de brancher ou débrancher l’alimentation électrique du moteur, en respect avec un principe de câblage réaliste. La courroie crantée a été fixée définitivement sur le roulement à bille de type Lazy-Susan (Photo N°1). Un nouveau test des commandes électroniques a été réalisé avec succès (Photo N°2). L’ensemble du moteur et l’armoire de câblage présentent un rendu réaliste satisfaisant (Photo N°3 & 4).
Validation fonctionnelle
Les vidéos suivantes montrent le bon fonctionnement de la plateforme rotative. La première vidéo est un test fonctionnel réalisé avec le prototypage de l’électronique de commande. La deuxième vidéo est un test fonctionnel réalisé avec le prototype du pupitre de commande V1.
Conclusion
Le design de ce modèle opérationnel de la plateforme rotative est satisfaisant. Les principes d’assemblages des différents sous-ensembles restent sommaires et seront améliorés ultérieurement pour présenter un niveau de réalisme plus en adéquation avec les objectifs pédagogiques du projet. L’électronique de commande ainsi que la gestion de l’affichage des commandes et leur l’horodatage par les carte Arduino sont opérationnels. Il reste à réaliser et valider la programmation des commandes automatiques.
Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
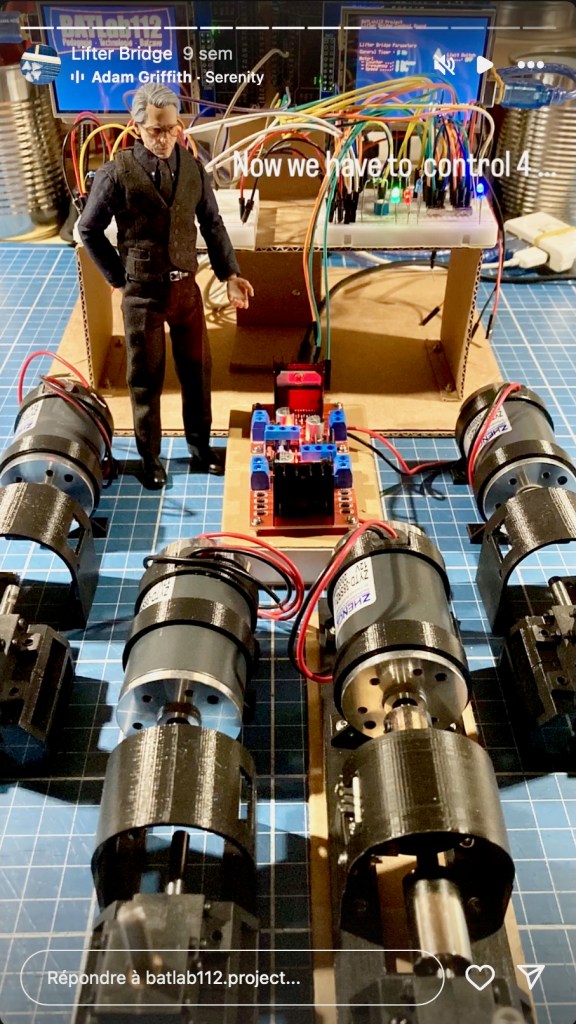
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.
Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
Cartes électroniques de puissance
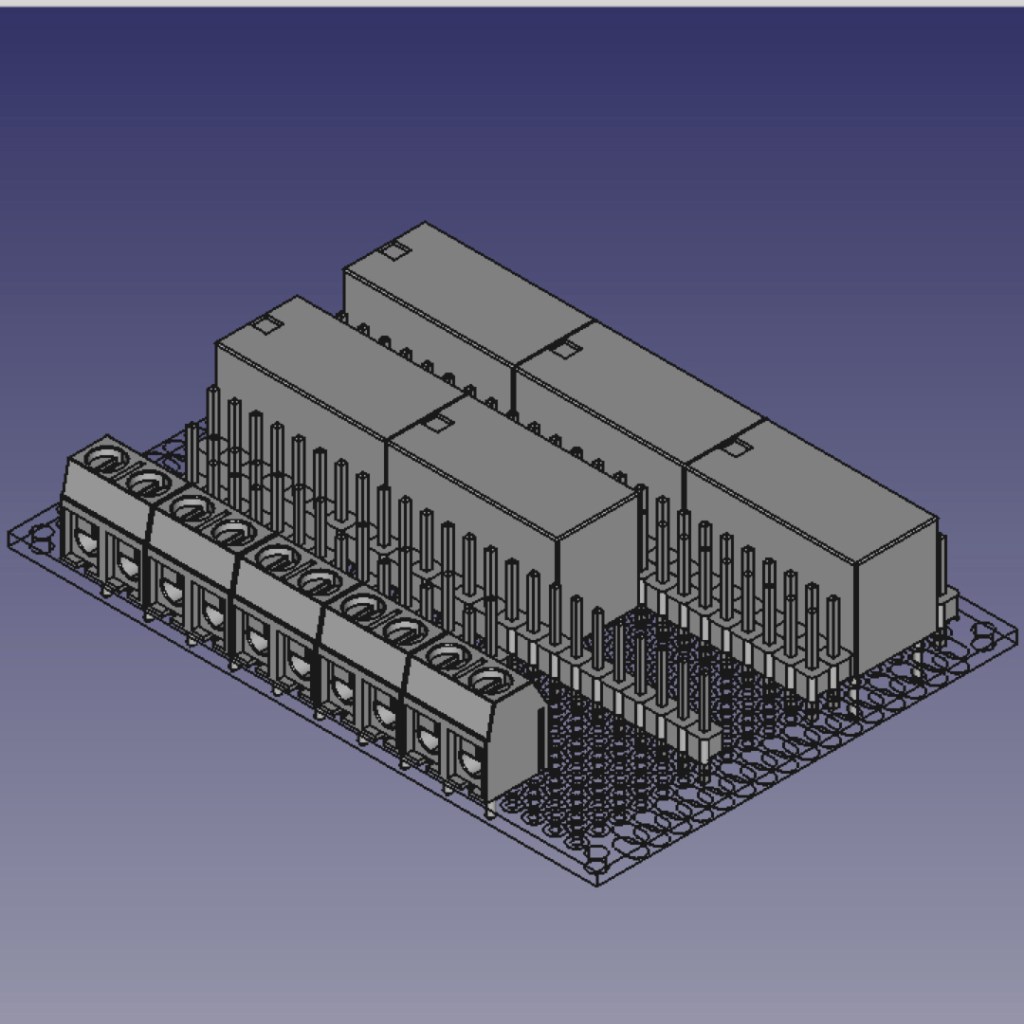
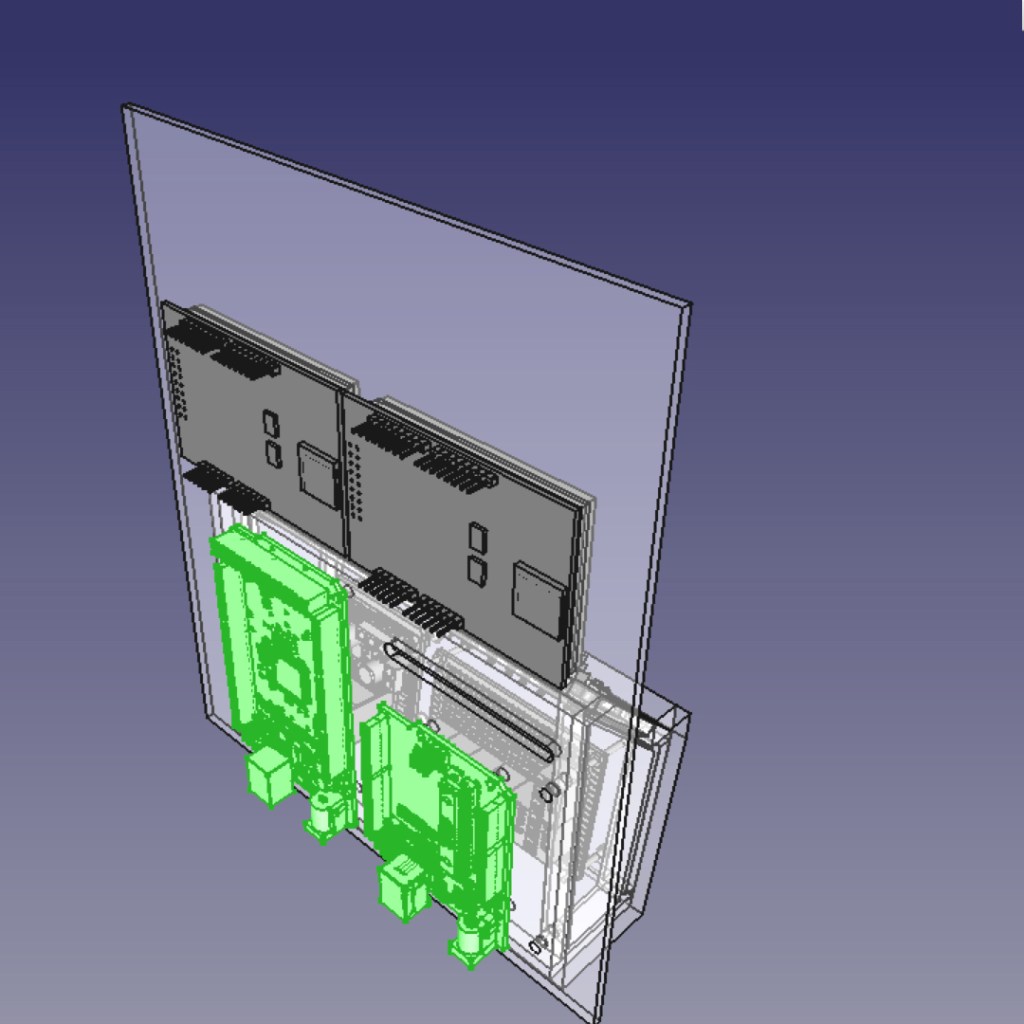
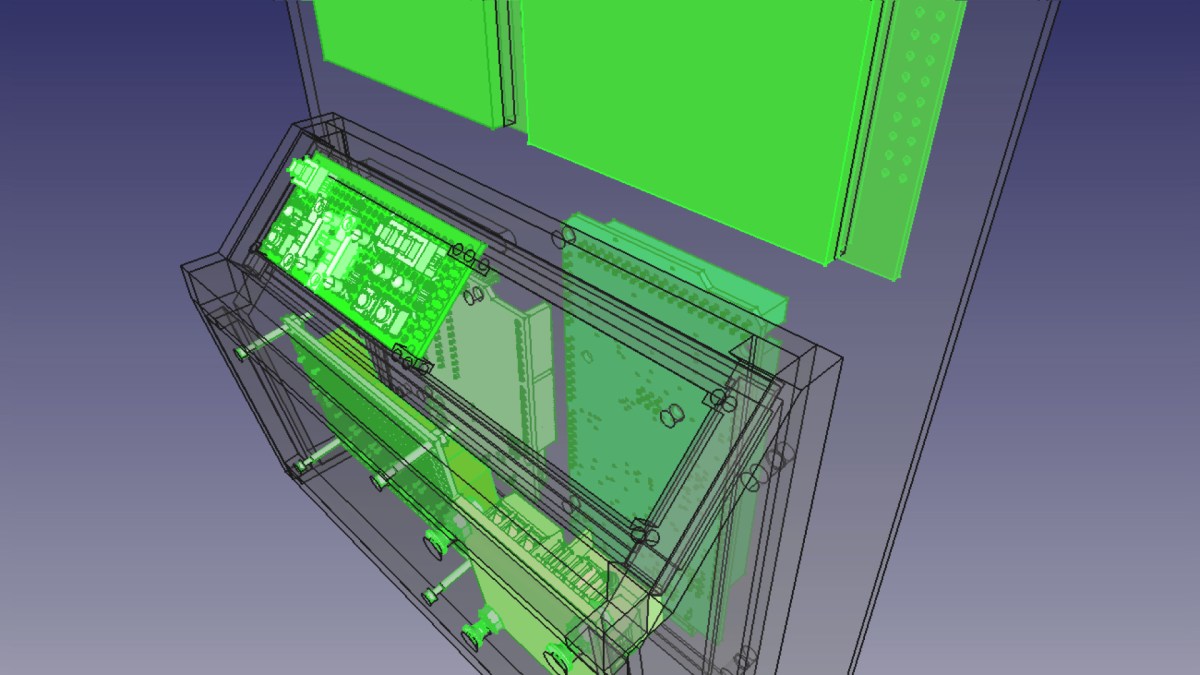
Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
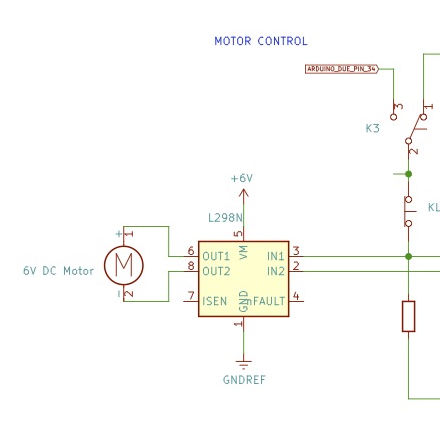
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
Cartes Arduino
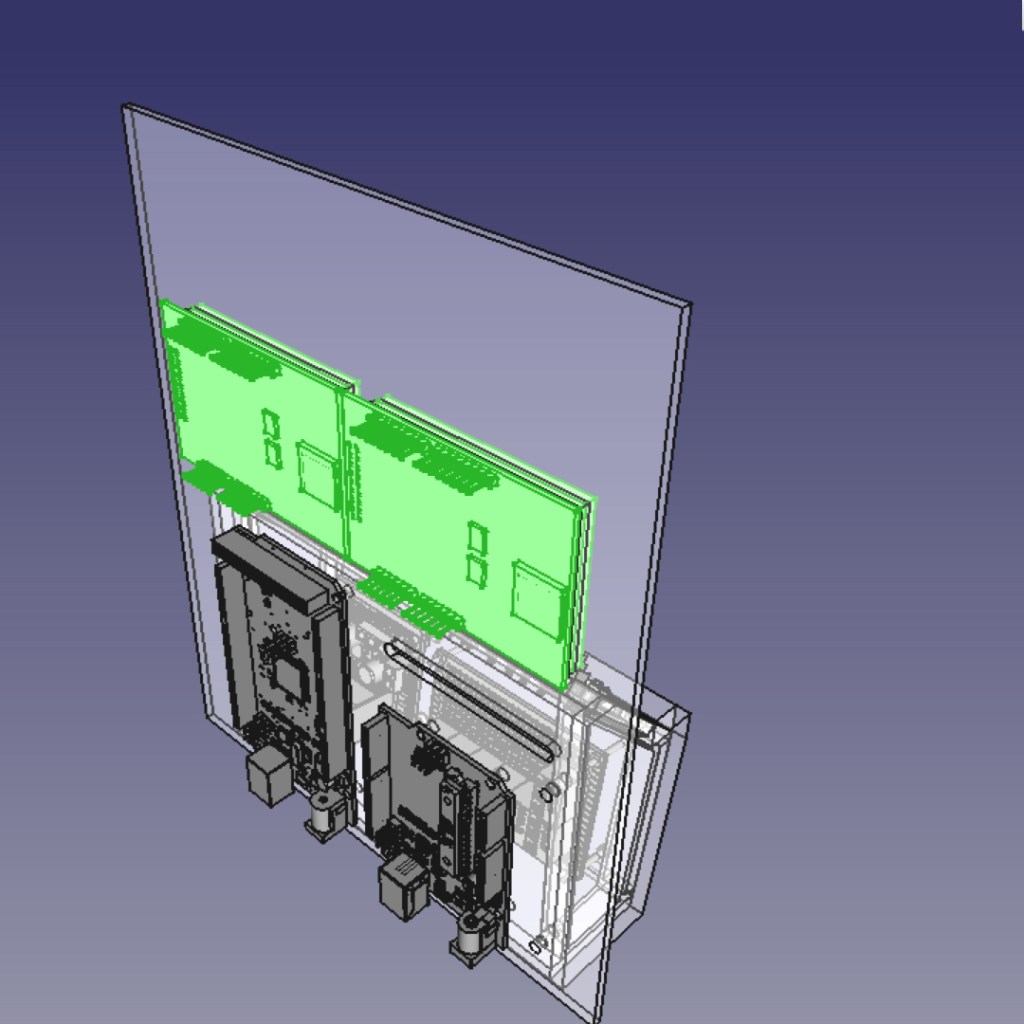
Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
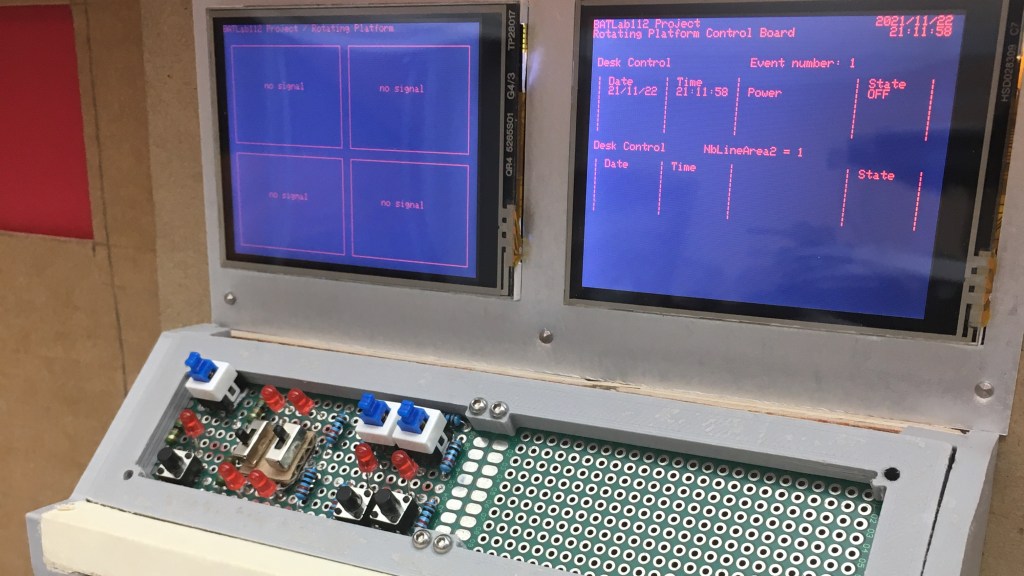
Panneau des commandes
La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
Ecrans de contrôle
Modélisation 3D
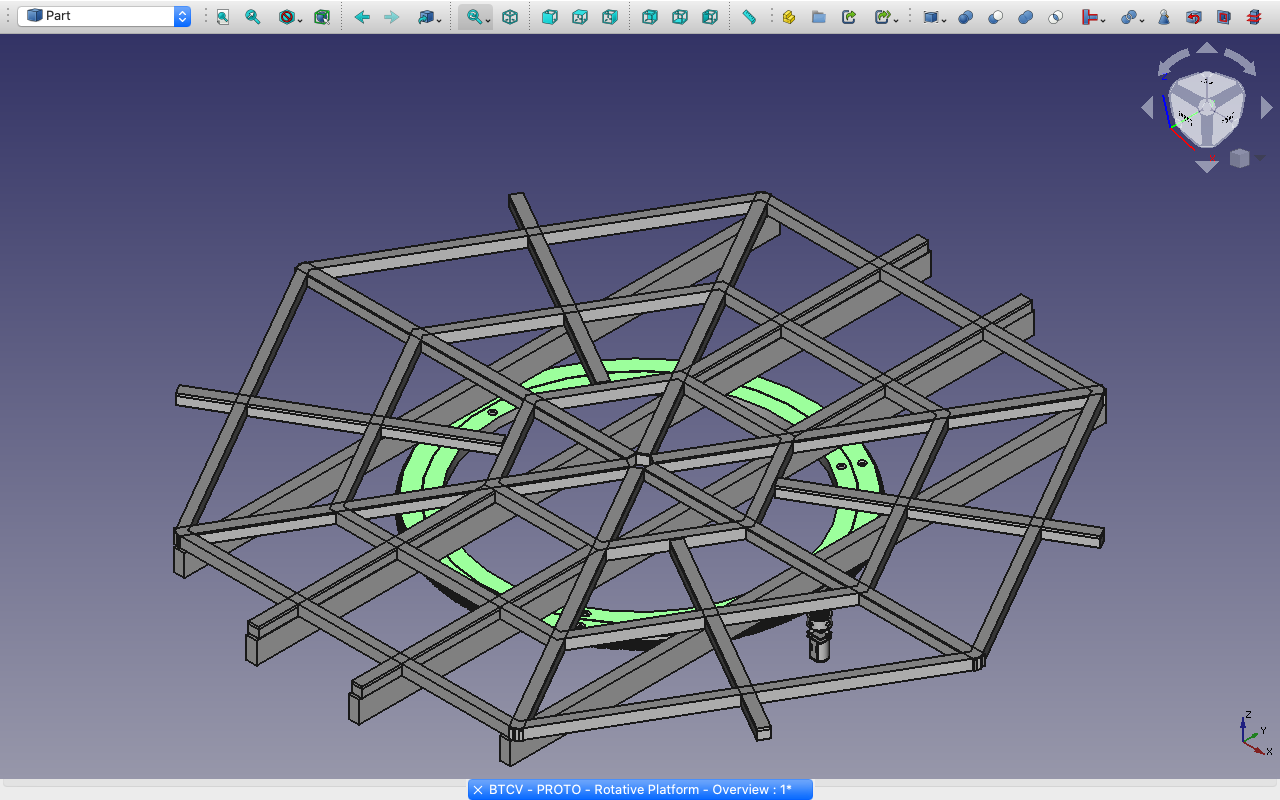
FreeCAD
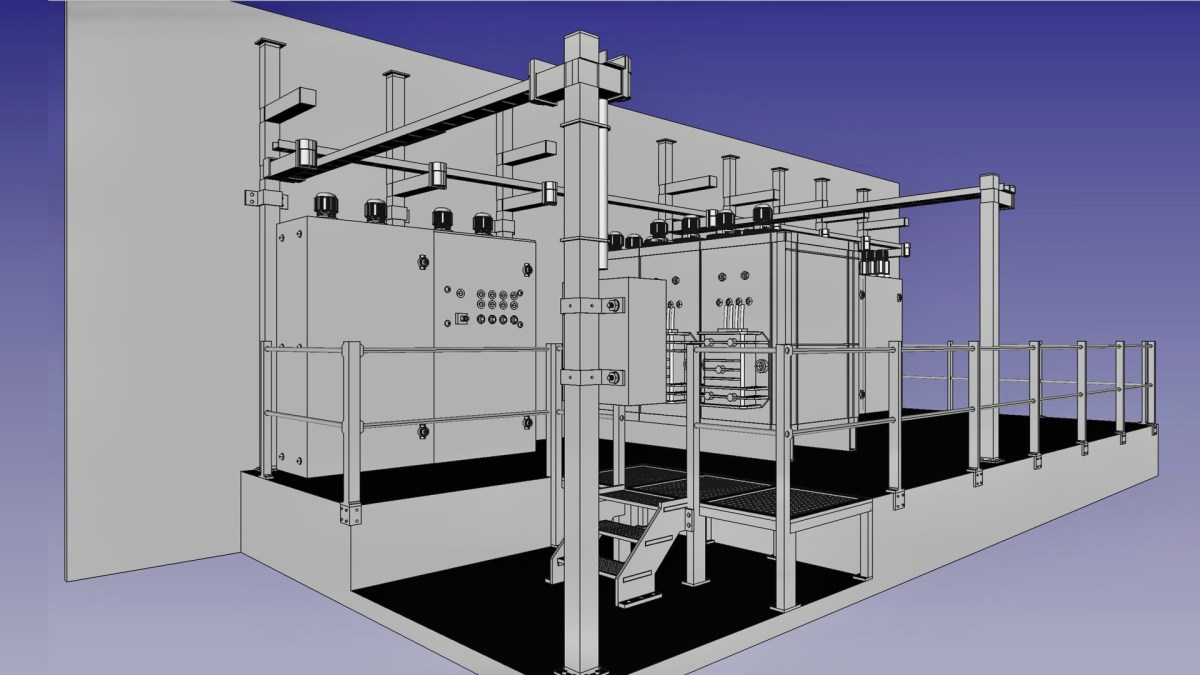
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.
La réalisation du diorama technique du projet BATLab112 requiert la mise en œuvre d’une infrastructure de commande fiable, didactique et cohérente avec les fonctions attendues du dispositif final. La console de commande, élément central de l’interface opérateur, constitue à ce titre un module critique. Elle assure l’articulation entre les commandes manuelles, les systèmes d’automatisation futurs et l’ensemble des actionneurs mécaniques, notamment le moteur de la plateforme rotative.
Après validation du concept mécanique de la console et de l’agencement des composants électroniques (écrans, boutons, commutateurs, microcontrôleurs), une première étape de prototypage électronique a été entreprise. L’objectif de cette phase est de vérifier la pertinence des choix techniques, d’évaluer l’ergonomie des modes de commande et de valider les comportements fonctionnels avant passage à une intégration définitive.
Le présent document propose une description détaillée de cette première version électronique, de son architecture générale aux essais menés sur maquette, en adoptant une démarche rigoureuse conforme aux standards de conception en électronique appliquée.
+ d’infos sur la conception préliminaire de la console de commande :
La structure électronique de la console de commande repose sur un schéma de principe élaboré à l’aide du logiciel libre KiCad, choisi pour sa flexibilité, sa richesse fonctionnelle et sa compatibilité avec les environnements de prototypage rapide.
L’architecture est organisée en deux sous-systèmes principaux :
Le module de gestion des commandes manuelles, intégrant les commandes de l’opérateur (boutons, commutateurs, voyants).
Le module d’interface de puissance, assurant la mise en forme et la distribution des signaux vers le moteur à courant continu responsable de la rotation de la plateforme.
Cette séparation fonctionnelle répond à un impératif de lisibilité du schéma mais également à une logique de modularité favorisant les évolutions ultérieures.
KiCad
Ce schéma électronique est réalisé avec la suite logicielle KiCad distribuée librement.
La partie supérieure du schéma se divisent en 5 parties dédiées à la gestion des commandes. La partie inférieure du schéma est dédiée à l’interface entre les commandes et l’alimentation du moteur de rotation de la plateforme.
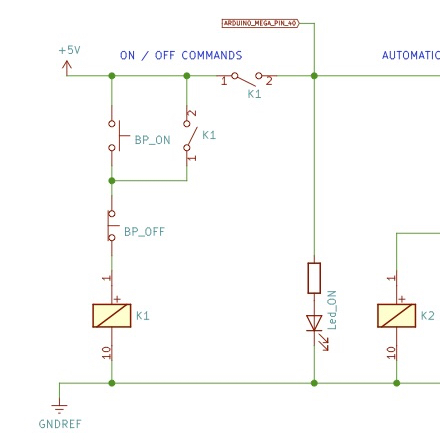
Mise sous tension – arrêt général
La mise sous tension générale est réalisée au moyen d’un relais à auto-maintien, solution fréquemment adoptée dans les environnements industriels.
Le principe consiste à maintenir l’alimentation du circuit tant que le relais reste excité, l’opérateur pouvant interrompre cette excitation via un bouton poussoir d’arrêt. Cette architecture garantit la sécurité fonctionnelle du dispositif tout en simplifiant le comportement de remise en service.
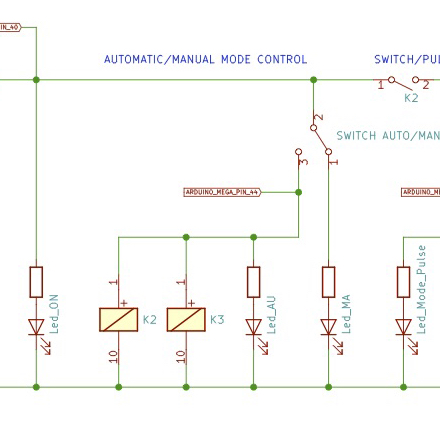
Sélection du mode Auto / Manuel
Un commutateur à deux positions permet de choisir entre un mode automatique et un mode manuel. Ce choix conditionne la provenance des signaux de commande :
En mode manuel, les boutons opérateur commandent directement les relais gérant le sens de rotation.
En mode automatique, ces mêmes relais sont pilotés par l’unité d’automatisation (qui sera intégrée dans une phase ultérieure du projet).
BP_ON : Bouton poussoir de commande du relais K1
K1 : Relais dont un contact est utilisé pour assurer son auto-maintien. Le deuxième contact est utilisé pour mettre sous tension tout le reste du montage.
BP_OFF : Bouton poussoir de coupure de l’alimentation du relais K1.
Led_ON : Led dont l’allumage dépend du deuxième contact du relais K1.
SWITCH AUTO/MAN : Commutateur permettant d’alimenter soit les relais K2, K3 et la Led Led_AU, soit la Led Led_MA seule.
K2 : Relais dont un des contacts autorise la mise sous tension de la suite du montage.
K3 : Relais dont les contacts aiguilles vers l’interface de puissance du moteur, les commandes manuelles ou les commandes automatiques.
Led_AU : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position AUTO.
Led_MA : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position MAN.
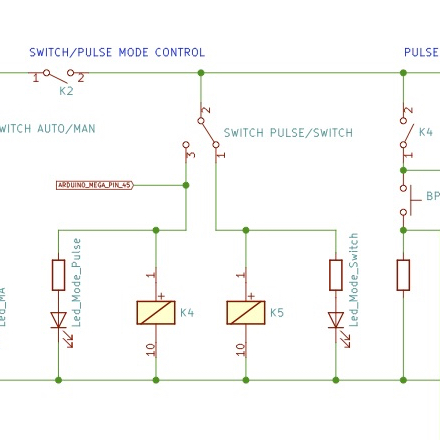
Sélection du mode Switch / Pulse
La sélection entre le mode switch et le mode pulse est assurée par un commutateur à 2 positions.
SWITCH PULSE/SWITCH : Commutateur permettant d’alimenter soit K4 et Led_Pulse, soit K5 et Led_Switch.
K4 : Relais dont un contact va autoriser les commandes manuelles en mode pulse.
K5 : Relais dont un contact va autoriser les commandes manuelles en mode switch.
Led_Pulse : Led dont l’allumage est commandé par le commutateur en position Pulse.
Led_Switch : Led dont l’allumage est commandé par le commutateur en position Switch.
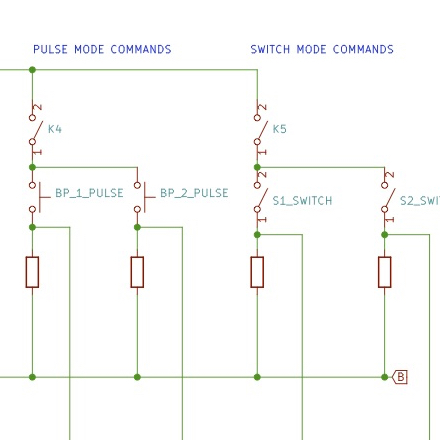
Switch & Pulse Commands
Les commandes manuelles en mode pulse sont assurées par des boutons poussoirs classiques. Il est nécessaire de maintenir l’appui sur le bouton poussoir maintenir la commande.
Les commandes manuelles en mode switch sont assurées par des boutons poussoirs à maintien de position. un premier appui bloque le bouton poussoir en position pour activer la commande. Un second appui, libère la position du bouton poussoir est arrête la commande.
PB1_PULSE: Bouton poussoir de commande de la rotation du moteur dans un sens.
PB2_PULSE : Bouton poussoir de commande de la rotation du moteur dans l’autre sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans un sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans l’autre sens.
Controller commands
Les contacts du relais K3 permettent d’aiguiller vers le moteur, soit les signaux des commandes manuelles soit ceux des commandes automatiques.
LED_R1 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
LED_R2 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
DC Motor controller
L’interface de puissance qui assure le pilotage du sens de rotation du moteur à partir des signaux de commandes numériques manuelles ou automatiques est une carte électronique basée sur un L298N.
Maquette
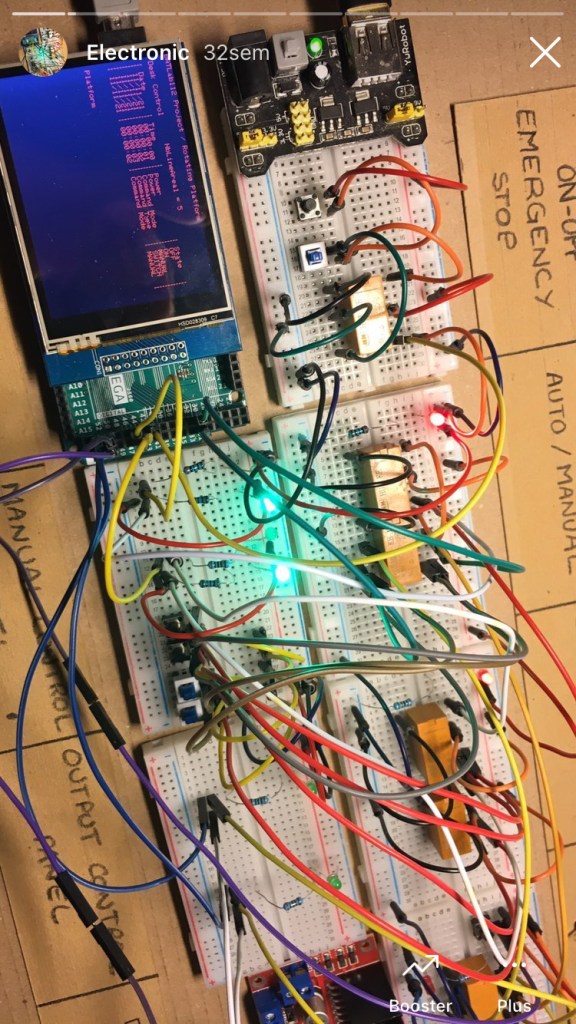
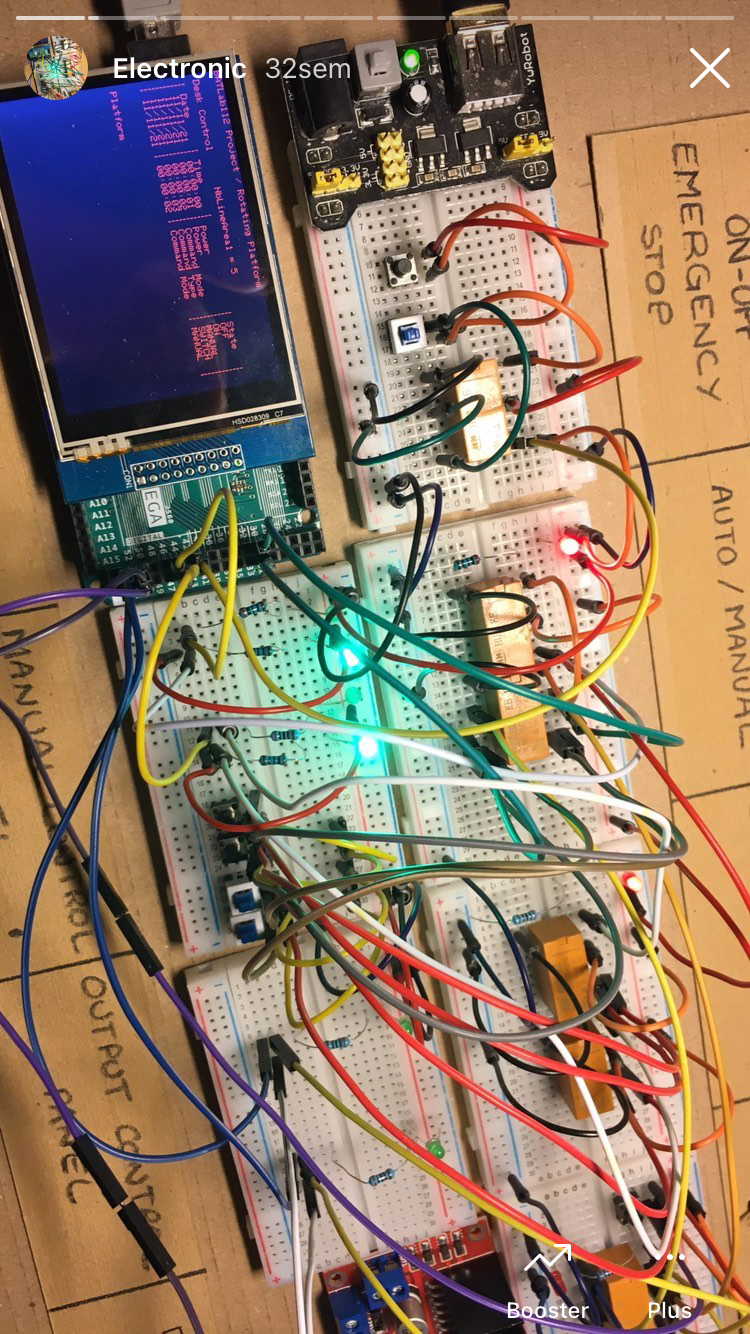
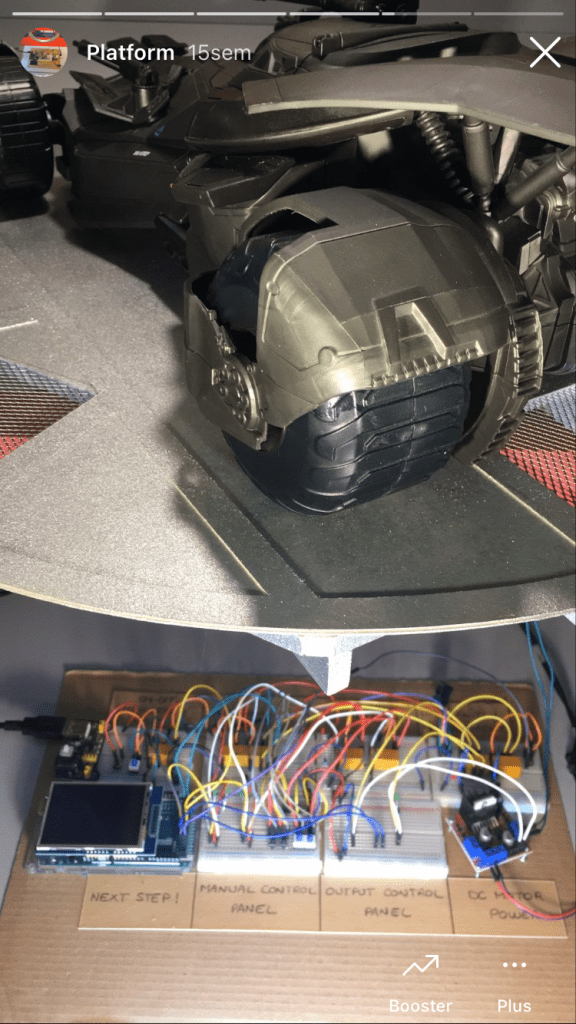
Afin de valider ces choix, une maquette physique du circuit a été réalisée. Le câblage sur plaque expérimentale (protoboard) a permis :
de vérifier la cohérence des connexions ;
de confirmer la compatibilité électrique entre les éléments ;
d’effectuer une série de tests fonctionnels (mise sous tension, bascules de modes, commandes moteurs).
Cette démarche de prototypage intermédiaire est conforme aux bonnes pratiques de l’ingénierie électronique, permettant de déceler d’éventuelles incohérences avant la production d’un circuit imprimé ou l’intégration dans l’environnement mécanique définitif.
Test de fonctionnement
Cartes électroniques
Conclusion
Cette première itération électronique de la console de commande du diorama BATLab112 constitue une étape structurante du projet. Elle permet de valider l’ensemble des fonctions de base : gestion de la mise sous tension, sélection des différents modes de commande, pilotage du moteur de la plateforme rotative et évaluation de l’ergonomie opérateur.
L’architecture modulaire mise en place offre une marge significative pour les développements ultérieurs, notamment :
l’intégration d’un système de contrôle automatisé basé sur Arduino ou équivalent,
la mise en place d’un affichage en temps réel via un écran TFT 2,8’’,
la migration vers un câblage définitif en adéquation avec les contraintes mécaniques du diorama.
En ce sens, ce prototype représente un jalon essentiel dans la transition entre la conception préliminaire et la validation fonctionnelle du dispositif final, illustrant une démarche académique structurée et reproductible.
Cet article présente la réalisation du prototype de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du prototype de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
La structure de la plateforme a été fabriquée en bois pour des raisons économiques mais aussi de facilité et rapidité de mise en oeuvre, le montage ayant pu être réalisé par simple collage. La plaque de couverture a été fabriquée en carton. La liaison pivot est assurée par un roulement à bille de type Lazy Susan, généralement utilisé pour des plateaux tournant de table.
La réalisation de ce premier prototype de la plateforme rotative de la Batcave du projet BATLab112 poursuit plusieurs objectifs. Il s’agit dans un premier temps de valider le design issu de la conception préliminaire et dans un deuxième temps de tester la motorisation de ce système.
Valider le design technique
Valider le design fonctionnel
Valider le design mécanique
Tester la motorisation du système
Vues de détails
Design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire
Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite à des différences de côtes rencontrées lors de la réception de pièces manufacturées.
Prototype n°1
Les différents éléments ont été assemblés par collage. La fabrication de la structure en bois est plutôt satisfaisante. Même si les imperfections des pièces de bois utilisées ne permettent pas une précision au millimètre, cette structure présente une surface d’appui pour le plateau suffisamment plane. Elle est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Pour améliorer la précision de fabrication, une solution consisterait à rectifier toutes les pièces de bois avant assemblage ou d’opter pour des profilés aluminium.
Design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le poids total, de la plateforme et du modèle réduit de la Batmobile, doit être le plus faible possible, pour autoriser l’utilisation d’un micro-moteur pour la rotation, afin d’être conforme avec les exigences d’échelle 1/12 du projet. Il s’agit donc ici de contrôler particulièrement si l’utilisation de matériaux légers est compatible avec l’assemblage du roulement à bille plus lourd.
Prototype n°1
L’assemblage de la structure en bois sur le roulement à billes de type Lazy Susan est réalisé grâce à 1 cercle de carton. Ce cercle est collé sur la structure. Les pions (en blancs sur la photo) fixent l’ensemble sur le roulement à billes. Cet assemblage est satisfaisant pour solidariser la structure en bois avec la couronne extérieure du roulement à billes. Il autorise la rotation de l’ensemble par rapport à la couronne intérieure. Le design fonctionnel est donc validé.
Une amélioration consisterait à réaliser le cercle d’assemblage entre la structure en bois et le roulement à billes dans un matériau plus rigide que du simple carton d’emballage ce qui éviterait les éventuelles déformations.
Résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids du modèle réduit de la Batmobile.
Conception préliminaire
Le plateau de la plateforme doit être d’une épaisseur très mince (inférieure à 2mm), pour des raisons de cohérence avec l’échelle 1/12 du projet. Il est nécessaire de s’assurer d’une part que sa réalisation puisse se faire dans un matériau suffisamment léger (ici du carton) pour ne pas rendre l’ensemble trop lourd pour la capacité des moteurs du pont élévateur et de la plateforme. D’autre part, il est aussi nécessaire de s’assurer que ce plateau ne se déforme pas sous le poids du modèle réduit de la Batmobile.
Prototype n°1
Le plateau de la structure est découpé dans une plaque de carton d’emballage d’épaisseur 1mm. Dans un premier temps, ce plateau est simplement posé sur la structure en bois. L’ensemble structure et plateau supporte tout à fait le poids du modèle réduit de la Batmobile. Le plateau ne se déforme pas sous le poids de la Batmobile. L’architecture de la structure de la plateforme associé à un plateau de faible épaisseur est donc validée.
Une amélioration consisterait à réaliser le plateau par découpe laser pour obtenir une découpe plus précise.
Motorisation
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
L’engrenage de transmission est réalisé avec une poulie montée sur l’axe du moteur et une courroie GT2 5mm entourée autour du diamètre extérieur du roulement à billes. La courroie n’a pas été collée mais juste maintenue par du ruban adhésif. Le moteur est lui aussi simplement maintenu par du ruban adhésif contre un des supports provisoires de la plateforme. Le test est concluant malgré un montage sommaire. Cependant, ce montage ne permet pas de réaliser une rotation complète de la plateforme à cause de la présence du ruban adhésif.
La prochaine version de cette transmission devra intégrer le collage définitif de la courroie ainsi qu’une fixation plus appropriée du moteur.
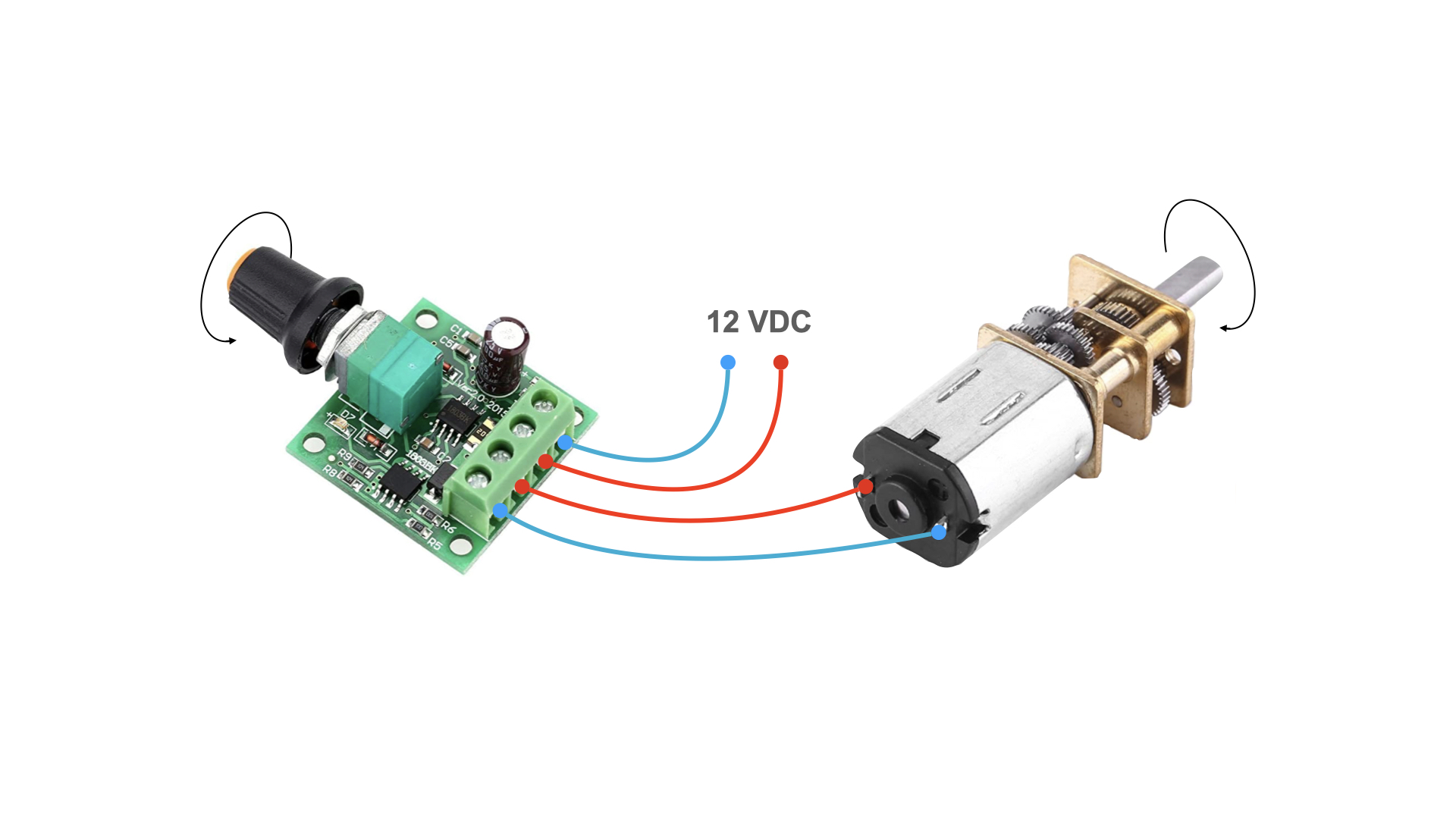
Moteur
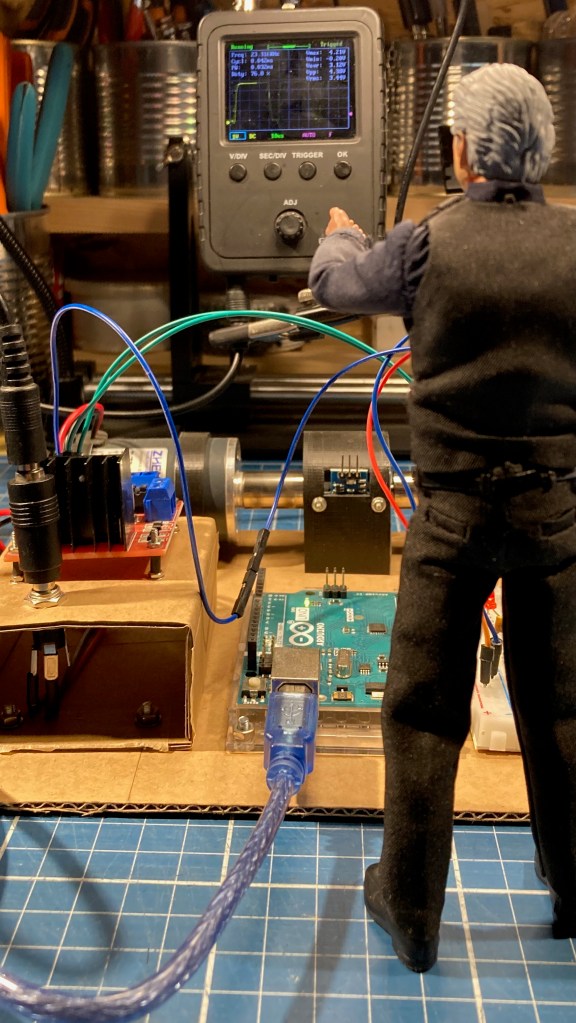
Ce test de motorisation a été réalisé avec un micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler la tension d’alimentation du moteur et ainsi ajuster la vitesse de rotation de la plateforme. Le couple du moteur associé au rapport de réduction de l’engrenage suffit pour entrainer l’ensemble ; plateforme et modèle réduit de la Batmobile. Le test de motorisation est donc validé.
Validation fonctionnelle
Conclusion
Ce premier prototype de la plateforme rotative de la Batmobile équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
L’article présente la conception détaillée et la réalisation du premier prototype fonctionnel du poste électrique HT/BT à l’échelle 1/12 pour le diorama pédagogique de la Batcave du projet BATLab112. Il s’inscrit dans la phase de conception détaillée visant à reproduire avec fidélité les fonctions d’un poste électrique industriel.… Lire la suite →
Cet article contient des références à des marques commerciales. Ceci n’est en aucun cas un placement de produit ou de la publicité. Ces produits sont cités au titre de la référence qu’ils représentent dans la recherche de solutions techniques dans le contexte du projet BATLab112.
Contexte et objectifs du projet BATLab112
Ce premier prototype fonctionnel du poste électrique de la Batcave du projet BATLab112, a été réalisé suite à sa conception préliminaire, essentiellement destinée à modéliser les enveloppes mécaniques des différents éléments le composant.
La conception détaillée du poste électrique de la Batcave s’inscrit dans l’objectif de réalisme poursuivi par le projet BATLab112 à des fins pédagogiques. À ce titre, les choix de conception opérés visent à reproduire avec la plus grande fidélité possible le fonctionnement de chacun des éléments constitutifs de ce poste électrique, tant sur le plan fonctionnel que didactique.
Les photographies présentées dans cet article illustrent le prototype du poste HT/BT dans son état initial, antérieur à la phase de reprise du design extérieur, engagée en vue d’améliorer le rendu visuel et la cohérence esthétique de l’ensemble.
Présentation Générale du Poste Électrique à l’Échelle 1/12
L’architecture du poste électrique du diorama de la Batcave, dans le cadre du projet BATLab112, s’inspire directement de l’organisation conventionnelle d’un poste électrique industriel réel, identifiée lors de la phase de parangonnage des systèmes existants.
L’armoire de raccordement électrique constitue l’interface entre l’alimentation fournie par le réseau — représentée, dans le cadre du diorama, par une prise 230 VAC 50 Hz — et le réseau électrique interne du diorama. Cette armoire intègre un sectionneur interne permettant d’isoler complètement le réseau du diorama, assurant ainsi une sécurité fonctionnelle et opérationnelle.
Le convertisseur de puissance, ou transformateur, est l’équipement chargé de la transformation de la tension alternative du secteur en tensions continues de basses valeurs, adaptées à l’alimentation des différents équipements du diorama. Quatre niveaux de basses tensions ont été définis en fonction des besoins spécifiques :
5 V DC : alimentation des composants électroniques tels que LED, boutons poussoirs et relais.
6 V DC : alimentation des petits moteurs du pont roulant et de la plateforme rotative.
12 V DC : alimentation des quatre moteurs du pont élévateur.
12 V DC secondaire : alimentation des équipements annexes du diorama, notamment l’éclairage.
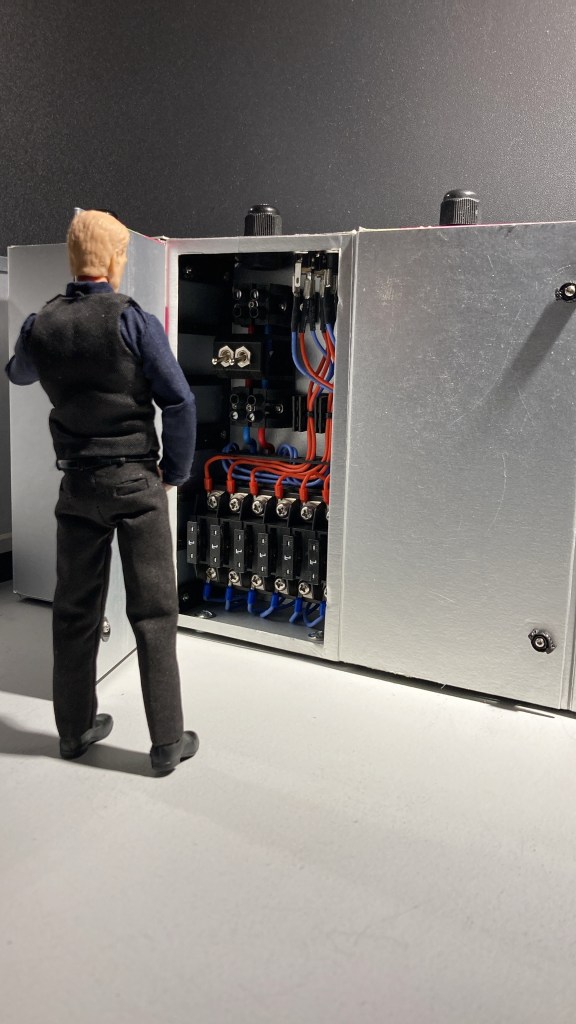
L’armoire de commande des basses tensions est dotée d’un panneau de commande permettant de contrôler la mise en marche et l’arrêt de la distribution de ces tensions à l’ensemble du diorama. Sa conception reproduit fidèlement le fonctionnement d’un équipement industriel réel, y compris le principe de câblage basé sur des relais électromécaniques, offrant ainsi une expérience pédagogique complète et réaliste.
Conception et réalisation du convertisseur de puissance
Choix techniques et matériaux de fabrication
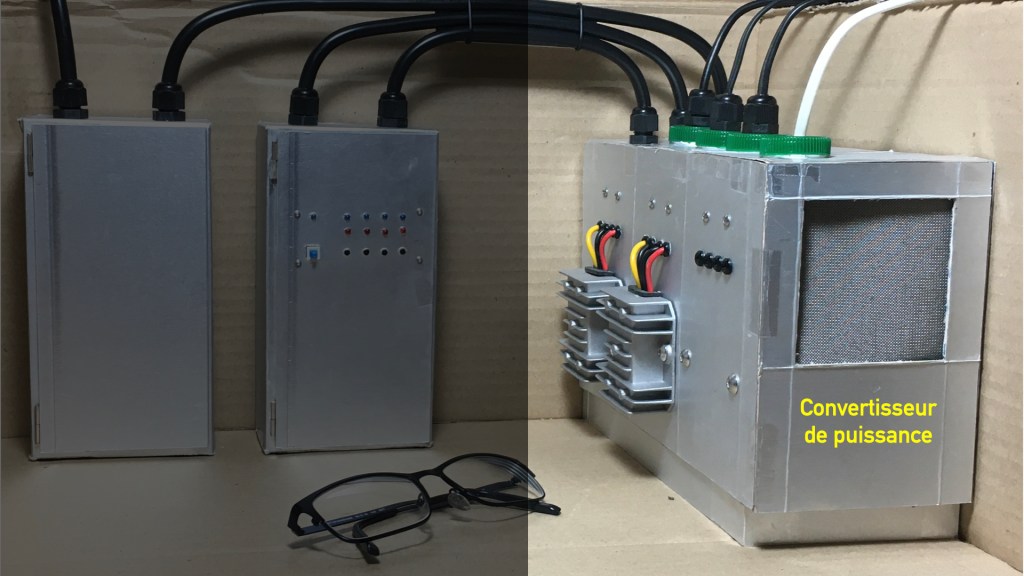
La structure interne de ce prototype de convertisseur de puissance est réalisée à partir de carton d’emballage de récupération, constituant une solution simple et fonctionnelle pour le support des composants. La structure externe, dédiée à la finition esthétique du convertisseur, est quant à elle conçue à partir de briques d’emballage alimentaire de jus de fruit, dont la face interne en aluminium contribue à la rigidité et à l’aspect visuel de l’ensemble.
Intégration des convertisseurs DC/DC
Ce premier prototype intègre deux convertisseurs DC/DC permettant de fournir des tensions de 5 VDC et de 6 VDC, répondant aux besoins actuels du projet. La réserve d’espace disponible au sein du boîtier autorise l’intégration ultérieure d’un convertisseur DC/DC supplémentaire, en fonction de l’évolution des exigences fonctionnelles du projet BATLab112.
Panneau basse tension : conception et fonctionnalités
Choix techniques et matériaux de fabrication
La structure interne du convertisseur de ce prototype du convertisseur de puissance est réalisé en carton. La structure externe, assurant la finition esthétique du convertisseur, est réalisée avec des briques d’emballage alimentaire (intérieur en aluminium).
Interface de commande et de signalisation
Le panneau de commande des basses tensions est conçu selon une organisation comparable à celle d’un panneau de commande industriel réel. Il est équipé de quatre boutons poussoirs permettant le pilotage des quatre niveaux de tension requis pour l’alimentation électrique des équipements industriels miniaturisés du diorama à l’échelle 1/12, à savoir le pont roulant, le pont élévateur, la plateforme tournante et les bras robotiques. Des voyants lumineux associés assurent la visualisation de l’état des commandes correspondantes, selon un fonctionnement binaire de type ON/OFF.
À l’instar des installations industrielles réelles, un bouton poussoir d’arrêt d’urgence est intégré au dispositif. Celui-ci permet l’interruption immédiate de l’alimentation électrique des quatre tensions, garantissant l’arrêt simultané de l’ensemble des équipements électriques du diorama.
Carte électronique support des boutons et voyants
La carte électronique intégrée à l’armoire de commande des basses tensions est équipée de quatre relais électromécaniques, permettant de reproduire fidèlement le fonctionnement d’un panneau de commande industriel réel. Le choix d’une commande par boutons poussoirs, fidèle à la réalité, nécessite la mise en œuvre d’un dispositif reposant sur des relais électromécaniques à double contact, assurant une fonction d’auto-maintien.
Chaque action sur un bouton poussoir alimente la bobine du relais correspondant, entraînant la fermeture d’un contact et le maintien de l’état de commande sans action continue de l’utilisateur. L’activation du bouton poussoir d’arrêt d’urgence provoque quant à elle la coupure de l’alimentation électrique des bobines de l’ensemble des relais, entraînant la désactivation simultanée de tous les dispositifs d’auto-maintien et l’arrêt immédiat des équipements commandés.
Sourcing
Schéma électrique de commande des relais avec auto-maintien
Optimisation du nombre de contact de commande
La recherche de composants, présentée dans le paragraphe précédent, met en évidence des relais dont la tension d’alimentation de la bobine est compatible avec la tension 12VDC de sortie du bloc d’alimentation de puissance, mais dont le nombre de contacts est limité à deux. Or, la mise en œuvre des fonctions d’auto-maintien, de commande de la tension de sortie et de pilotage d’une diode électroluminescente utilisée comme voyant de signalisation requiert la disponibilité de trois contacts distincts. Afin de satisfaire cette contrainte fonctionnelle, le schéma électrique proposé repose sur une architecture utilisant deux relais à deux contacts chacun, permettant d’atteindre le nombre de contacts de commande nécessaire.
Schéma électrique d’une commande à relais par auto-maintien
Les structures interne et externe de cette armoire de raccordement sont réalisées avec des briques d’emballage alimentaire de jus de fruit (intérieur en aluminium). Le module interne du sectionneur est réalisé en carton et en brique alimentaire.
Conception du sectionneur électrique
Le sectionneur est constitué de deux interrupteurs capables de supporter des tensions de 230 VAC, intégrés dans une enveloppe assurant à la fois une fonction de support mécanique et un rôle de sécurité, en empêchant l’accès direct aux contacts électriques sous tension. Le raccordement des tensions d’entrée et de sortie en 230 VAC est réalisé, dans ce prototype, à l’aide de dominos électriques. Bien que cette solution ne réponde pas pleinement aux exigences de sécurité relatives à la manipulation, elle présente l’avantage, dans le cadre du développement du prototype, de faciliter la réalisation de relevés de mesure des tensions.
Sourcing
Schéma électrique du sectionneur de l’armoire de raccordement
Principe de fonctionnement du sectionneur électrique du diorama
Le principe de fonctionnement du sectionneur repose sur l’établissement ou la rupture mécanique d’un chemin conducteur entre l’alimentation électrique et le circuit aval. Lorsque le sectionneur est en position fermée, ses contacts fixes et mobiles sont solidarisés, assurant la continuité électrique de l’ensemble des pôles et permettant l’acheminement de l’énergie vers les équipements raccordés.
En position ouverte, l’actionnement du mécanisme provoque l’écartement physique des contacts, créant une coupure visible et garantissant l’isolement électrique du circuit. Cette séparation, réalisée simultanément sur tous les pôles, empêche toute circulation de courant et autorise les opérations de maintenance en conditions de sécurité. Le sectionneur est conçu pour être manœuvré hors charge et pour maintenir de manière stable chacune de ses positions, conformément aux exigences de fiabilité et de sécurité imposées aux dispositifs d’isolement des installations électriques.
Schéma de câblage électrique du sectionneur principal du diorama
Les schémas électriques et électroniques du diorama de la Batcave, développé dans le cadre du projet BATLab112, sont réalisés à l’aide de la suite logicielle open source KiCad. Le recours à cet outil permet d’assurer une représentation rigoureuse et normalisée des schémas, en conformité avec les normes techniques en vigueur.
Si le revêtement réalisé à partir de briques d’emballage alimentaire permet d’envisager un rendu esthétique globalement satisfaisant, l’emploi de carton pour la structure interne s’est révélé inadapté. En effet, une fois l’ensemble des composants intégrés, la masse du convertisseur excède les capacités mécaniques du carton, entraînant des déformations lors des manipulations nécessaires au câblage interne. Au regard des dimensions de l’équipement, la réalisation de la structure interne en bois apparaît plus appropriée pour les versions ultérieures de ce convertisseur.
Par ailleurs, ce prototype est doté d’une grille d’aération en face avant. Néanmoins, la dissipation thermique liée à la chaleur dégagée par l’alimentation interne 230 VAC / 12 VDC devra faire l’objet d’une analyse plus approfondie, notamment lorsque celle-ci sera sollicitée pour alimenter l’ensemble des équipements électriques du diorama.
Armoire de raccordement
La réalisation des structures interne et externe à partir de briques d’emballage alimentaire ne permet pas d’assurer une rigidité suffisante de l’armoire lorsque celle-ci doit être raccordée à des câbles d’entrée et de sortie de type 3G2,5 afin d’être intégrée au diorama. Compte tenu des dimensions de l’équipement et des contraintes mécaniques associées, le recours à une impression 3D pour la fabrication de la structure interne de la prochaine version de cette armoire apparaît comme une solution plus adaptée.
Par ailleurs, la conception mécanique des charnières de la porte ne s’avère pas satisfaisante, tant du point de vue de la faisabilité technique que de la robustesse. L’intégration de dispositifs de fermeture, tels que des poignées assurant le maintien de la porte en position fermée, devra être prise en compte lors de la conception du prochain modèle de cette armoire.
Panneau Basse tension
Les observations formulées sont identiques à celles précédemment établies pour l’armoire de raccordement. En outre, la conception de la carte électronique supportant les boutons de commande et les voyants lumineux nécessite une révision approfondie, dans l’objectif d’en simplifier l’architecture, d’en améliorer la lisibilité fonctionnelle et d’en faciliter la mise en œuvre.
Voir aussi
Des articles sur l’avancement du réseau électrique du diorama