Le processus de conception d’un circuit imprimé (PCB) comporte une étape déterminante : l’implantation des composants électroniques. La qualité de cette implantation influence directement les performances du routage, c’est-à-dire l’organisation des pistes reliant les composants entre eux. Pour optimiser cet agencement, des logiciels spécialisés proposent des solutions fondées sur divers paramètres, tels que le nombre de couches disponibles, les priorités fonctionnelles ou encore les contraintes de fabrication.
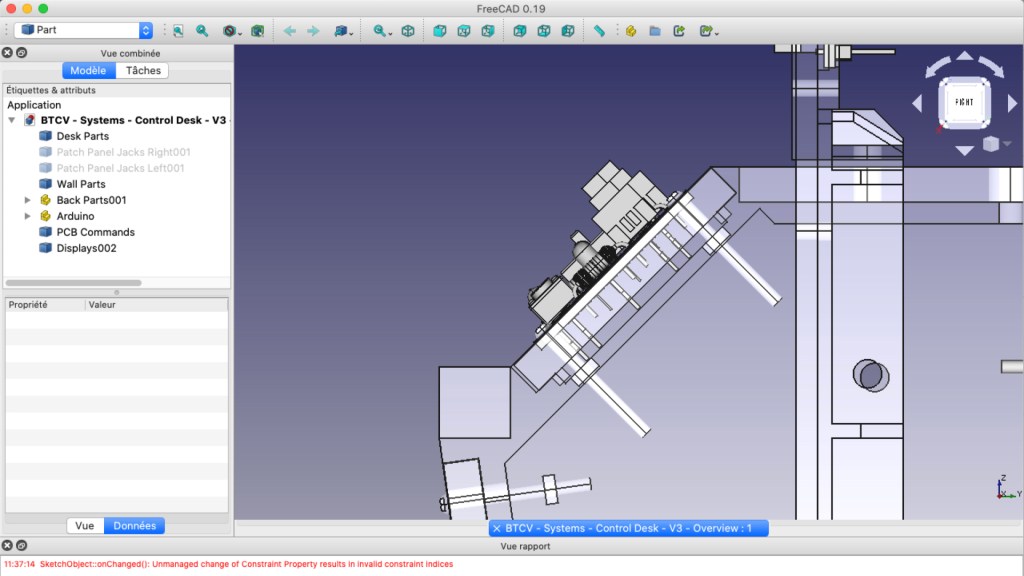
Dans le contexte du projet BATLab112, cette phase d’implantation revêt une importance particulière, en raison de contraintes spécifiques liées à la reproduction d’un environnement technique fonctionnel à l’échelle 1/12. L’utilisation de FreeCAD permet de visualiser et d’anticiper ces contraintes grâce à la modélisation 3D intégrée.
Ergonomie et cohérence fonctionnelle à l’échelle 1/12
La première contrainte concerne l’intégration des composants selon une logique d’ergonomie réaliste. Sur le PCB dédié aux commandes manuelles de la console, plusieurs éléments — boutons poussoirs, interrupteurs, voyants lumineux — doivent être positionnés conformément à une logique d’utilisation proche de celle d’un pupitre réel.
Ainsi, la disposition ne peut être arbitraire :
chaque voyant doit se situer à proximité immédiate de la commande qu’il signale ;
l’ensemble des commandes doit suivre un ordre cohérent, garantissant lisibilité, intuitivité et continuité d’usage.
Cette approche vise à préserver la valeur pédagogique et immersive du diorama technique, en assurant une correspondance entre interaction utilisateur et organisation fonctionnelle.
Contraintes de volume et d’intégration mécanique
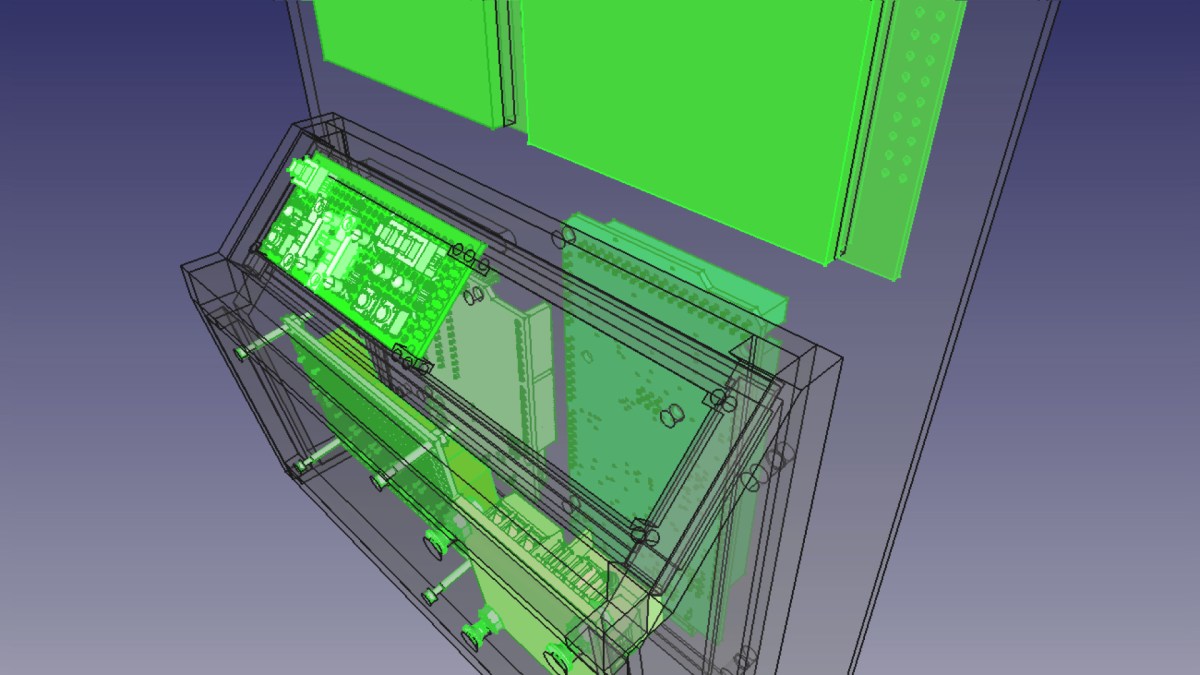
La seconde contrainte d’implantation concerne l’intégration mécanique des composants. Chaque élément doit présenter un volume compatible avec les limites imposées par la structure du diorama. L’épaisseur totale du PCB, la hauteur des composants, ainsi que l’espace disponible dans les caissons ou parois constitutifs du modèle réduisent la liberté d’implantation classique.
L’usage de FreeCAD offre ici un avantage déterminant : la modélisation 3D permet de vérifier la compatibilité dimensionnelle, d’anticiper les conflits d’encombrement et d’ajuster précisément les choix d’implantation.
Conclusion
En conclusion, l’usage d’un logiciel spécialisé dans l’implantation et le routage de PCB ne garantit pas une prise en compte satisfaisante des deux contraintes majeures identifiées — l’ergonomie fonctionnelle à l’échelle 1/12 et l’intégration mécanique des composants. En effet, ces outils opèrent généralement sans lien direct avec l’environnement mécanique réel du projet, ce qui limite leur capacité à assurer une cohérence entre implantation électronique et contraintes structurelles.
Pour cette raison, j’ai choisi de réaliser la phase d’implantation au sein de FreeCAD, déjà utilisé pour la conception du design mécanique du dispositif. Cette intégration dans un environnement unique de modélisation 3D permet de visualiser de manière globale et précise l’impact des choix d’implantation des composants sur l’architecture générale de l’équipement dans lequel le PCB doit s’insérer. Une telle démarche favorise la cohérence entre électronique et mécanique, condition essentielle à la qualité et à la pertinence pédagogique du projet BATLab112.
Le réseau électrique du diorama de la Batcave, développé dans le cadre du projet BATLab112, a pour fonction d’assurer la distribution de l’énergie électrique à l’ensemble des équipements du dispositif. Les quatre systèmes fonctionnels — la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques — sont pilotés par des consoles de commande dédiées, lesquelles requièrent également une alimentation électrique. En conséquence, la multiplicité des équipements, conjuguée à l’hétérogénéité des niveaux de tension requis, impose la mise en œuvre d’une infrastructure de distribution électrique spécifiquement adaptée.
Pour plus d’informations, voir les articles relatifs à la conception des équipements de la Batcave à l’échelle 1/12 :
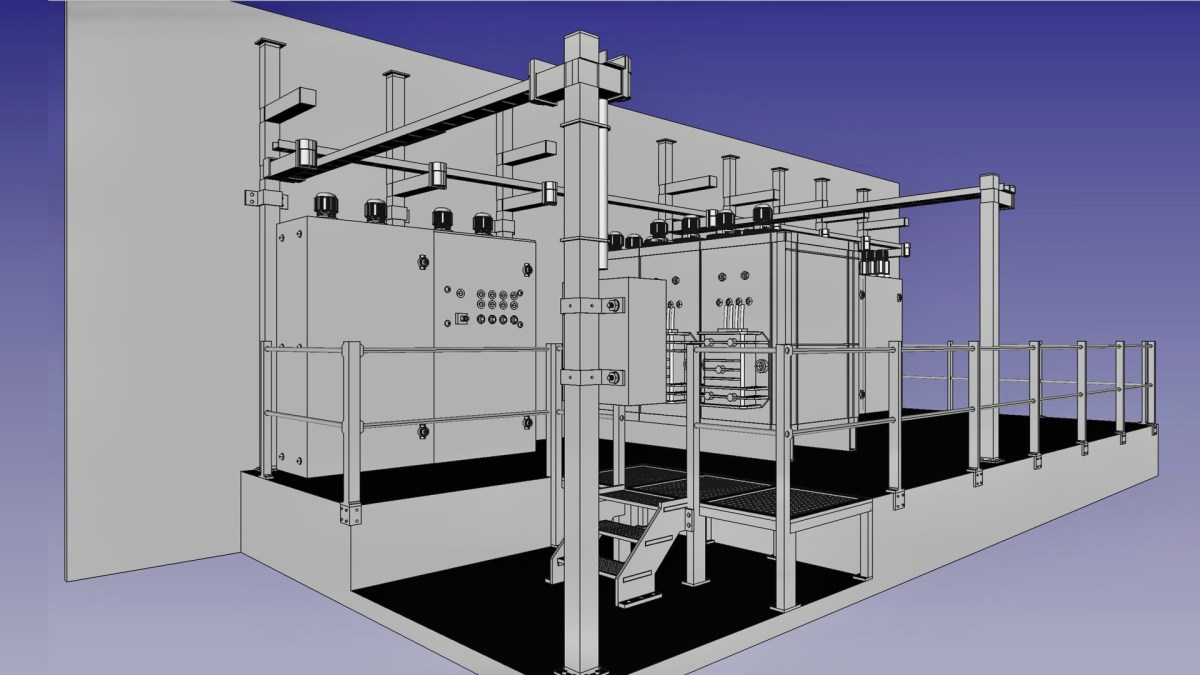
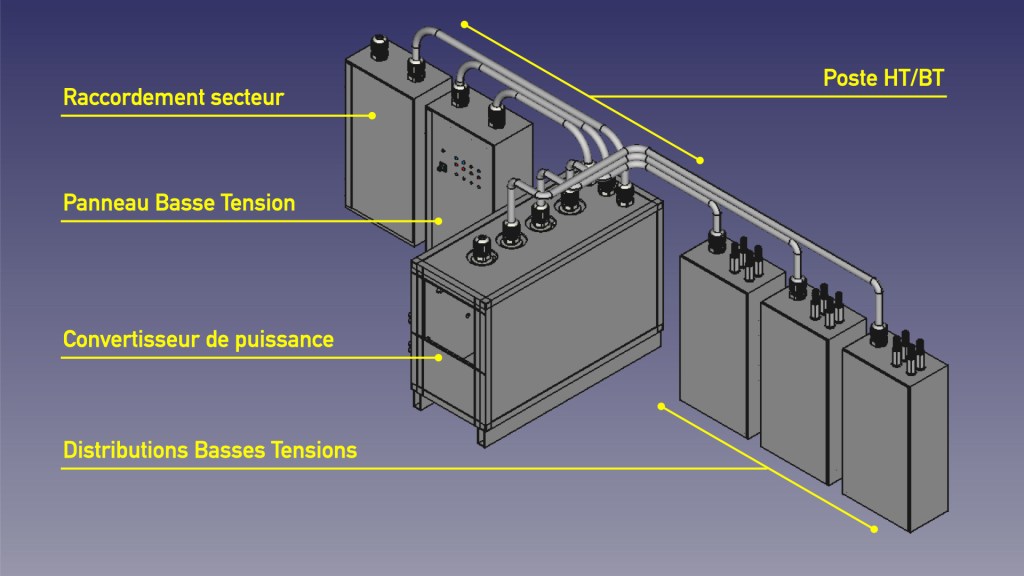
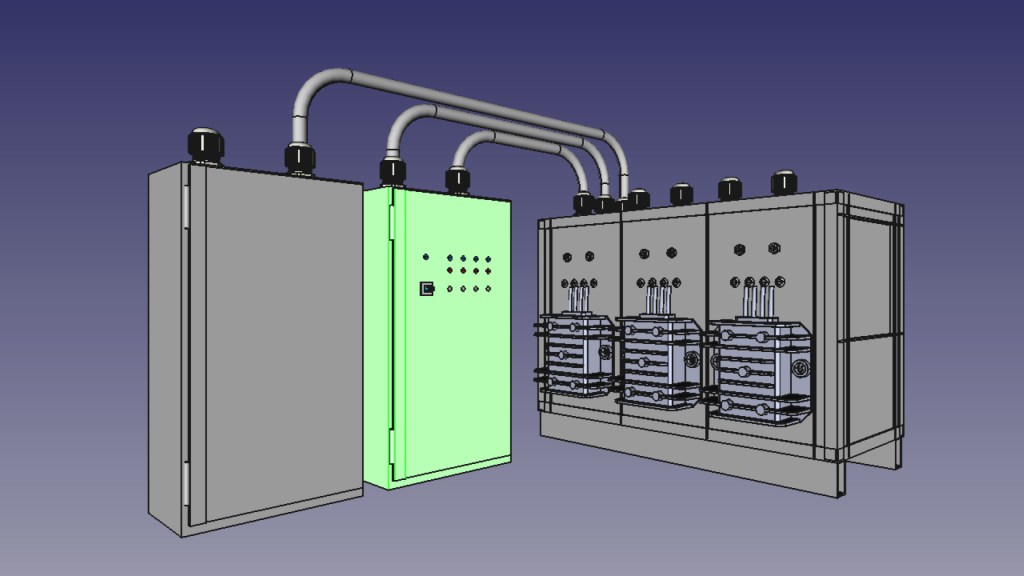
L’ensemble des dispositifs de distribution et de contrôle de l’énergie électrique est centralisé au sein d’un local technique dédié. Ce local assure la fonction de point de raccordement du diorama de la Batcave au réseau électrique, tout en intégrant l’ensemble des équipements nécessaires à la distribution de l’énergie et à son suivi opérationnel. Il abrite notamment le poste de transformation HT/BT ainsi que trois armoires de distribution correspondant aux niveaux de tension requis par les équipements du diorama, à savoir 5 VDC, 6 VDC et 12 VDC.
Structure interne
Présentation générale
A l’échelle 1:1, le module de raccordement, situé en amont du poste HT/BT, permet de raccorder un réseau de distribution électrique Basse Tension (BT), au réseau électrique Haute Tension (HT).
A l’échelle du diorama, l’armoire de raccordement assure le raccordement du réseau électrique de la Batcave, au réseau électrique domestique 230V 50Hz. L’entrée de cette armoire autorise un raccordement à une prise secteur par l’intermédiaire d’un câble électrique de type 3G 1,5 mm2.
Description détaillée
Les deux passe-câbles assurent le maintien mécanique du câble en entrée (depuis la prise secteur) et en sortie (vers le convertisseur).
Les deux borniers de raccordement assurent la connexion électriques des deux câbles.
L’interrupteur sectionneur permet d’isoler le diorama du réseau électrique.
Fonctionnement général
Une fois le raccordement au secteur réalisé, par l’intermédiaire du bornier de raccordement, le basculement de l’interrupteur sectionneur en position haute, permet d’alimenter en énergie électrique le convertisseur de puissance du diorama.
Le basculement de l’interrupteur sectionneur de l’armoire de raccordement en position basse, permet d’isoler complètement le diorama du secteur.
Cette armoire est l’unique point de raccordement au secteur du diorama, afin de garantir la sécurité des utilisateurs.
Modèles 3D
Modèle 3D du presse étoupe, passe câble, utilisé dans les 3 modules du poste HT/BT.
Modèle 3D du bloc de jonction, 230VAC, utilisé comme bornier de raccordement.
Modèle 3D de support de Led, utilisé comme passe câble du module sectionneur.
Modèle 3D des interrupteurs 230VAC utilisés comme sectionneur général du poste HT/BT.
Le convertisseur de puissance
Présentation générale
A l’échelle 1:1, le transformateur est l’équipement central du poste HT/BT. Il assure la transformation de la Haute Tension alternative du réseau de distribution électrique régional, en Basse Tension alternative 230V 50Hz.
A l’échelle du diorama, le transformateur est remplacé par un module – convertisseur de puissance -, qui assure la conversion de la tension secteur alternative 230V 50Hz en basses tensions continues compatibles avec les composants électroniques et actionneurs du projet ; électronique, moteurs…
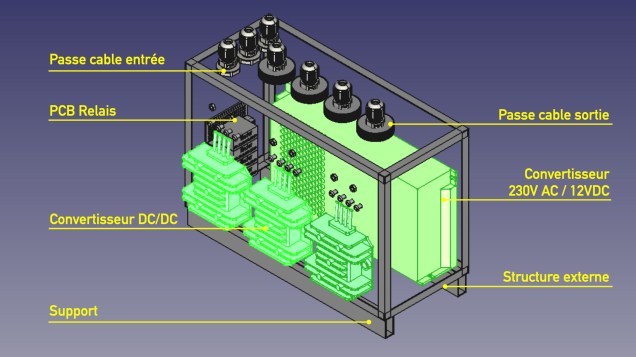
Description détaillée
Les 3 passe-câbles d’entrée assurent le maintien mécanique des câbles :
Câble 230VAC, issu de l’armoire de raccordement
Câble 12VDC, vers le tableau basse tension
Câble des commandes, issu du tableau basse tension.
Les 4 passe-câbles d’entrée assurent le maintien mécanique des câbles :
Câble 230VAC, issu de l’armoire de raccordement
Câble 12VDC, vers le tableau basse tension
Câble des commandes, issu du tableau basse tension.
Les 4 passe-câbles d’entrée assurent le maintien mécanique des câbles :
Câble 5VDC
Câble 6V DC
Câble 12V DC
Le convertisseur 230VAC/12VDC assure la conversion AC/DC de la tension secteur 230V 50Hz.
Les convertisseurs DC/DC assure la conversion de la tension 12VDC issue du convertisseur AC/DC en tensions continues plus basses ; 5VDC, 6VDC … compatibles avec les composants électroniques et actionneurs du diorama.
La carte électronique des relais assure les commutations des différentes tensions continues de sorties
Fonctionnement général
Lorsque l’interrupteur sectionneur de l’armoire de raccordement est basculé en position haute, le convertisseur 230VAC/12VDC du convertisseur de puissance, est alors alimenté en énergie électrique. Il fournit une tension de 12V continue en sortie. Cette tension alimente alors le panneau basse tension pour contrôler l’alimentation électrique des convertisseurs DC/DC.
Lorsque le convertisseur 230VAC/12VDC est sous tension, et que le bouton d’arrêt d’urgence du panneau basse tension est relâché, un appui sur un des boutons poussoirs du panneau de commande, déclenche la commande d’un relais. Ce relais commute la tension du convertisseur DC/DC correspondant, en sortie du convertisseur de puissance.
Modèles 3D
Modèle 3D de l’alimentation utilisée comme convertisseur 230VAC/12VDC.
Modèle 3D des convertisseurs de tensions 12VDC/6VDC et 12VDC/5VDC.
Modèle 3D des borniers utilisés sur la carte des relais de.commutation des tensions de sortie.
Modèle 3D des relais utilisés pour commuter les tensions de sorties du convertisseur.
Le tableau basse tension
Présentation générale
A l’échelle 1:1, le tableau BT permet de répartir l’énergie électrique sur les différents départs issus du poste de transformation. A l’échelle du diorama, cette armoire centralise les commandes des tensions continues en sortie du convertisseur.
Description détaillée
Les deux passe-câbles assurent le maintien mécanique du câble en entrée (depuis la sortie du convertisseur 230VAC/12VDC) et en sortie (vers la carte électronique des relais).
Le bornier de raccordement assure la connexion électriques des câbles.
La carte électronique – PCB des commandes -, centralise tous les circuits de commande des tensions de sortie du convertisseur de puissance.
La carte électronique – PCB des relais -, assure la commutation des différentes tensions de sortie du convertisseur de puissance, sous le contrôle des commandes.
Les cartes électroniques sont réalisées en logique câblée, à partir de relais électromagnétiques, de boutons poussoirs et de voyants de visualisation réalisés à partir de LEDs.
Fonctionnement général
Lorsque le convertisseur 230VAC / 12VDC est raccordé au réseau électrique domestique lors du basculement de l’interrupteur sectionneur de l’armoire de raccordement en position haute, il délivre en sortie une tension de 12V DC. Cette tension est alors utilisée pour alimenter en énergie électrique, une carte électronique de commande et une carte de relais qui contrôlent les tensions de sortie du convertisseur de puissance.
Modéles 3D
Modélisation 3D
FreeCAD
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
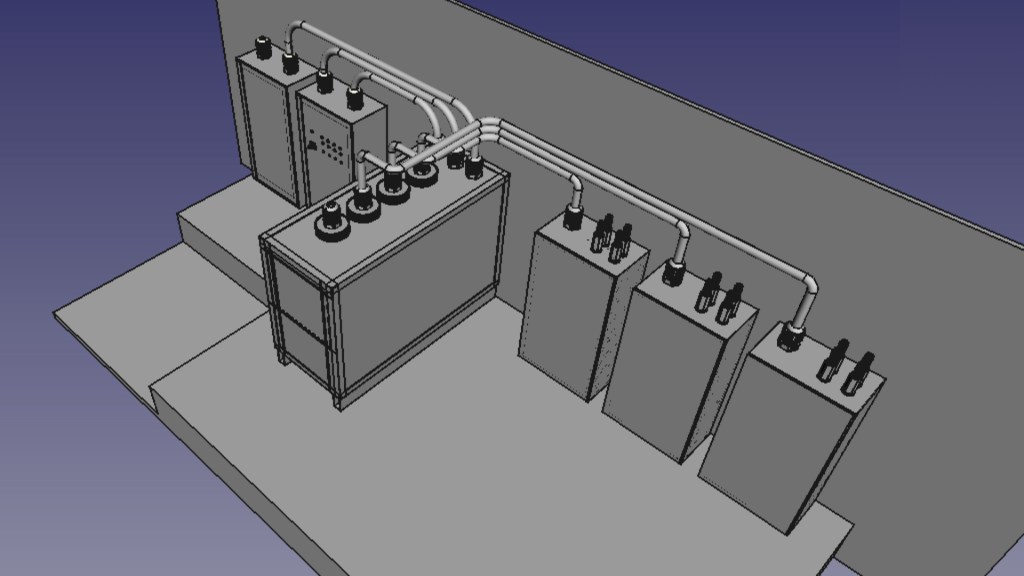
Visuels de la conception préliminaires des 3 modules composants le poste HT/BT.
GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Cet article décrit la conception détaillée d’une armoire de distribution électrique basse tension à l’échelle 1/12 pour le diorama de la Batcave du projet BATLab112. Il expose les contraintes mécaniques et fonctionnelles rencontrées, notamment l’importance d’une structure interne robuste pour maintenir les composants et faciliter les manipulations. Les systèmes réalistes à échelle réduite et leur…
La réalisation du prototype du poste HT/BT du diorama a mis en évidence les limites du mode opératoire initialement retenu pour la fabrication des armoires électriques. En particulier, l’absence de structure interne dédiée ne permet ni d’assurer une rigidité mécanique suffisante pour des manipulations répétées, ni de garantir un maintien adéquat et pérenne des composants internes de l’armoire.
L’objectif de cette démarche est double. Il s’agit, en premier lieu, de concevoir une structure interne générique, applicable à l’ensemble des armoires électriques du diorama de la Batcave. En second lieu, il convient de développer des équipements modulaires destinés à faciliter le câblage de ces armoires à l’échelle 1/12, tout en respectant de manière aussi fidèle que possible les principes de conception, d’implantation et de fonctionnement mis en œuvre à l’échelle réelle.
L’article présente la conception détaillée et la réalisation du premier prototype fonctionnel du poste électrique HT/BT à l’échelle 1/12 pour le diorama pédagogique de la Batcave du projet BATLab112. Il s’inscrit dans la phase de conception détaillée visant à reproduire avec fidélité les fonctions d’un poste électrique industriel.
Fondements du design proposé — Héritage de la phase de parangonnage
Le design présenté dans cet article, s’inscrit dans la continuité des articles précédents mais aussi de la phase de parangonnage des équipements électriques industriels existants. Dans cet article, une analyse systématique des systèmes existants à l’échelle 1 : 1, ainsi que des principes de fonctionnement et d’architecture interne des armoires de distribution, a été conduite afin d’identifier les contraintes techniques et mécaniques applicables à une reproduction à l’échelle 1 : 12. Ces éléments ont servi de base à l’élaboration des choix de conception retenus ici, notamment en matière de structure interne, d’intégration des modules (sectionneur, porte‑fusible) et d’optimisation pour fabrication additive.
Le design actuel reprend et adapte ces principes fondamentaux, en les contextualisant dans le cadre d’une approche modulaire et manufacturable par impression 3D. Cette démarche vise à garantir la fidélité fonctionnelle et mécanique des armoires tout en tirant parti des enseignements issus de la revue des équipements existants et des solutions techniques proposées dans l’article de conception détaillée original.
L’article examine les infrastructures industrielles de distribution électrique existantes en vue de leur adaptation à un diorama pédagogique représentant la Batcave. Il détaille d’abord la structure fonctionnelle d’un poste HTA/BT, qui abaisse la tension moyenne à basse tension et regroupe les dispositifs de protection, de transformation et de distribution. Ensuite, il analyse les armoires de…
Architecture des armoires de distribution électrique à l’échelle 1/12 du diorama de la Batcave
Entrées / Sorties
Les armoires de distribution électrique sont systématiquement dotées d’une entrée d’alimentation et de six sorties. À la date de publication de cet article, ce nombre de sorties excède les besoins liés aux équipements actuellement intégrés au diorama de la Batcave dans le cadre du projet BATLab112. En effet, quatre équipements sont à ce stade en cours de développement : la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Ces dispositifs sont chacun commandés et alimentés en énergie électrique par l’intermédiaire de leurs consoles de commande respectives. Les deux sorties restantes, volontairement non affectées, ont été prévues afin d’anticiper et de faciliter l’intégration d’évolutions fonctionnelles et de nouveaux équipements ultérieurs.
Pour + d’informations concernant la conception à l’échelle 1/12 des équipements industriels présents dans le diorama :
Les armoires de distribution électrique intègrent deux modules internes principaux : un sectionneur et un porte-fusible. Ces deux dispositifs ont été spécifiquement conçus et développés pour répondre aux exigences du projet BATLab112. Leur conception prend en compte les contraintes propres à une réalisation à l’échelle 1/12, tant sur le plan dimensionnel que sur celui de l’assemblage, tout en respectant les principes de fonctionnement, de sécurité et d’architecture habituellement mis en œuvre pour ce type de modules à l’échelle industrielle réelle.
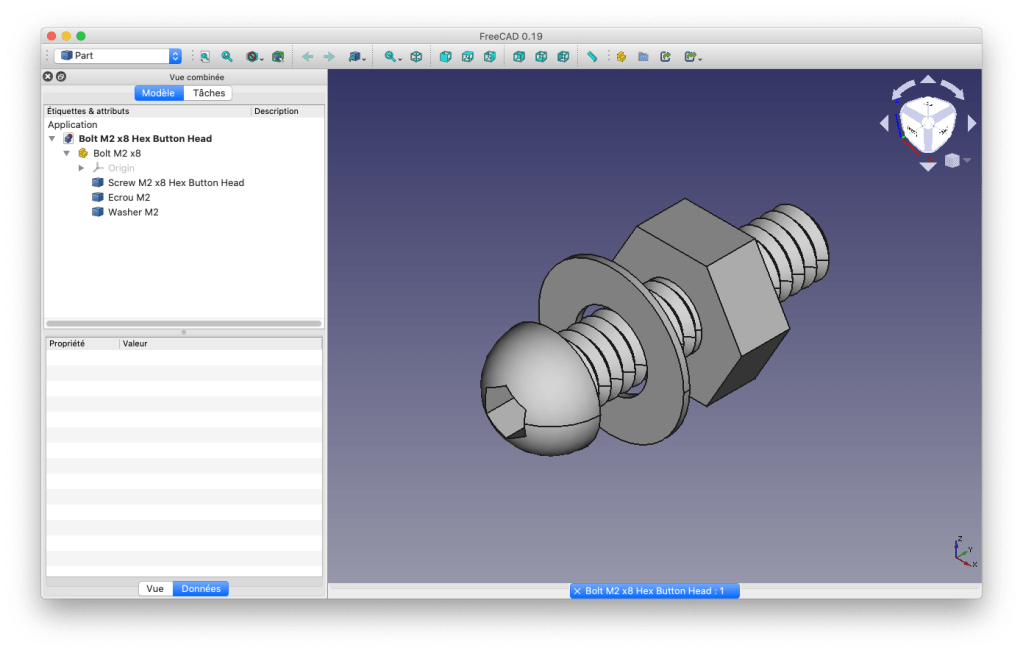
Ces deux modules sont conçus pour être solidarisés à la structure interne au moyen de boulons de type M2, garantissant à la fois un positionnement précis, une fixation mécanique fiable et une facilité de démontage compatible avec les opérations de maintenance et d’évolution du système.
Principe de fonctionnement des armoires de distribution électrique du diorama
Lorsque le sectionneur est basculé en position haute, la tension d’entrée est alors distribuée à l’ensemble des sorties de l’armoire. Les fusibles assurent une fonction de protection contre les surintensités susceptibles de survenir à la suite d’un dysfonctionnement de l’un des équipements du diorama. À l’inverse, lors du basculement du sectionneur en position basse, correspondant à l’ouverture des deux interrupteurs, l’ensemble des circuits de sortie est totalement isolé de la source d’alimentation électrique.
La tension d’entrée applicable à une armoire de distribution électrique peut correspondre à l’une des trois tensions continues utilisées par les équipements du diorama, à savoir 5 VDC, 6 VDC ou 12 VDC. Le courant maximal délivrable en sortie est déterminé conjointement par le calibre des fusibles installés et par la section du câblage interne de l’armoire. Dans sa première version, le dispositif est équipé de fusibles d’un calibre de 1 A par sortie, conduisant à un courant maximal total de 6 A en entrée.
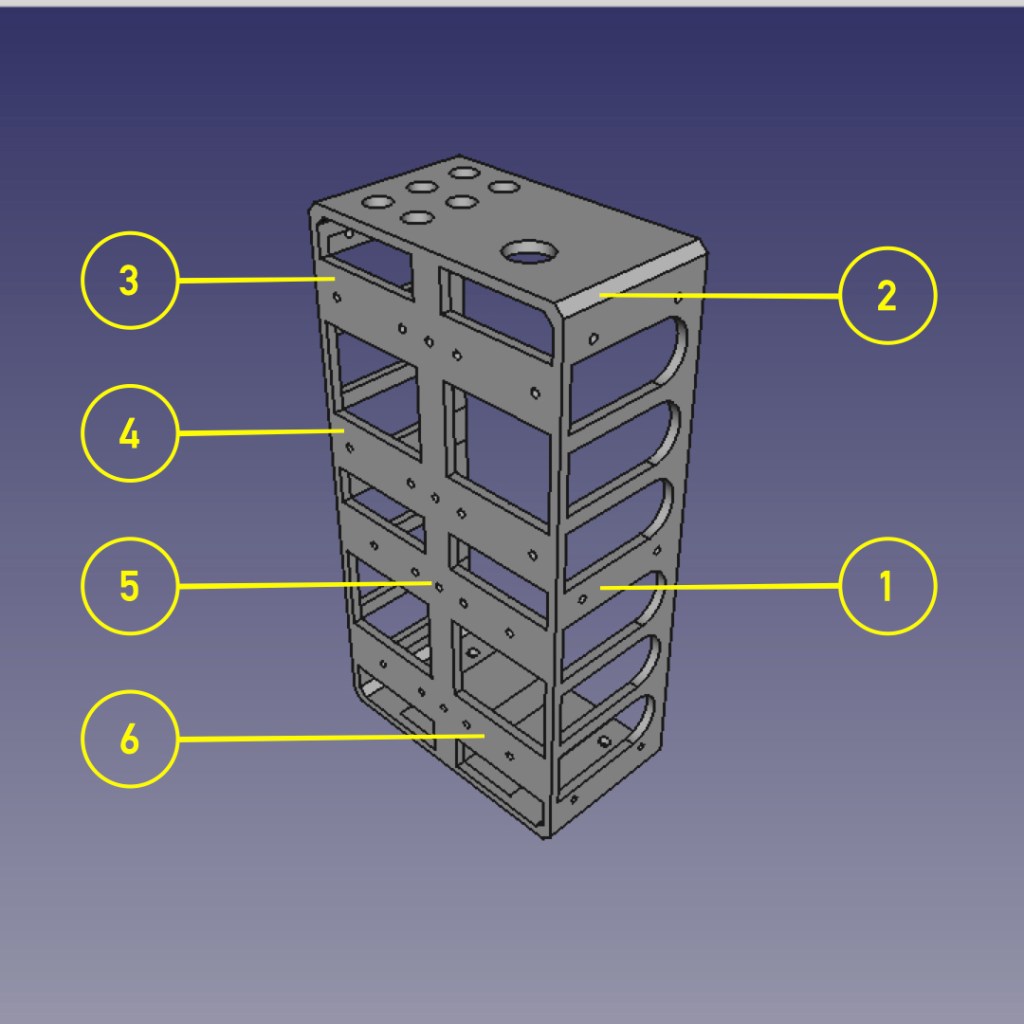
Modélisation 3D de la structure mécanique des armoires électriques du diorama
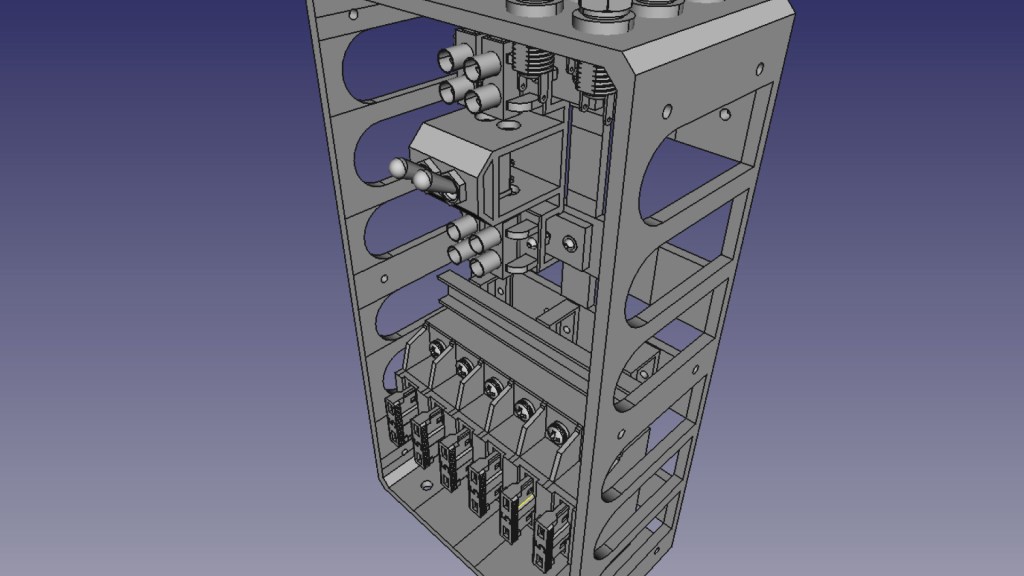
Screenshot 1 : Structure interne – Aperçu 3D 3/4 face
Screenshot 2 : Structure interne – Aperçu 3D 3/4 arrière
Présentation générale
La réalisation du prototype du poste HT/BT a mis en évidence les limites du mode opératoire retenu pour la fabrication des armoires électriques. En particulier, l’absence de structure interne ne permet pas d’assurer une robustesse mécanique compatible à la fois avec les contraintes d’exploitation imposées par le diorama et avec des manipulations régulières.
La conception d’une nouvelle structure interne vise à remédier à ces insuffisances en permettant la fabrication d’armoires électriques présentant des caractéristiques mécaniques adaptées aux exigences du diorama. Cette structure est spécifiquement destinée à être réalisée par fabrication additive, au moyen de l’impression 3D, afin de garantir précision dimensionnelle, répétabilité et facilité d’évolution du design.
Description détaillée
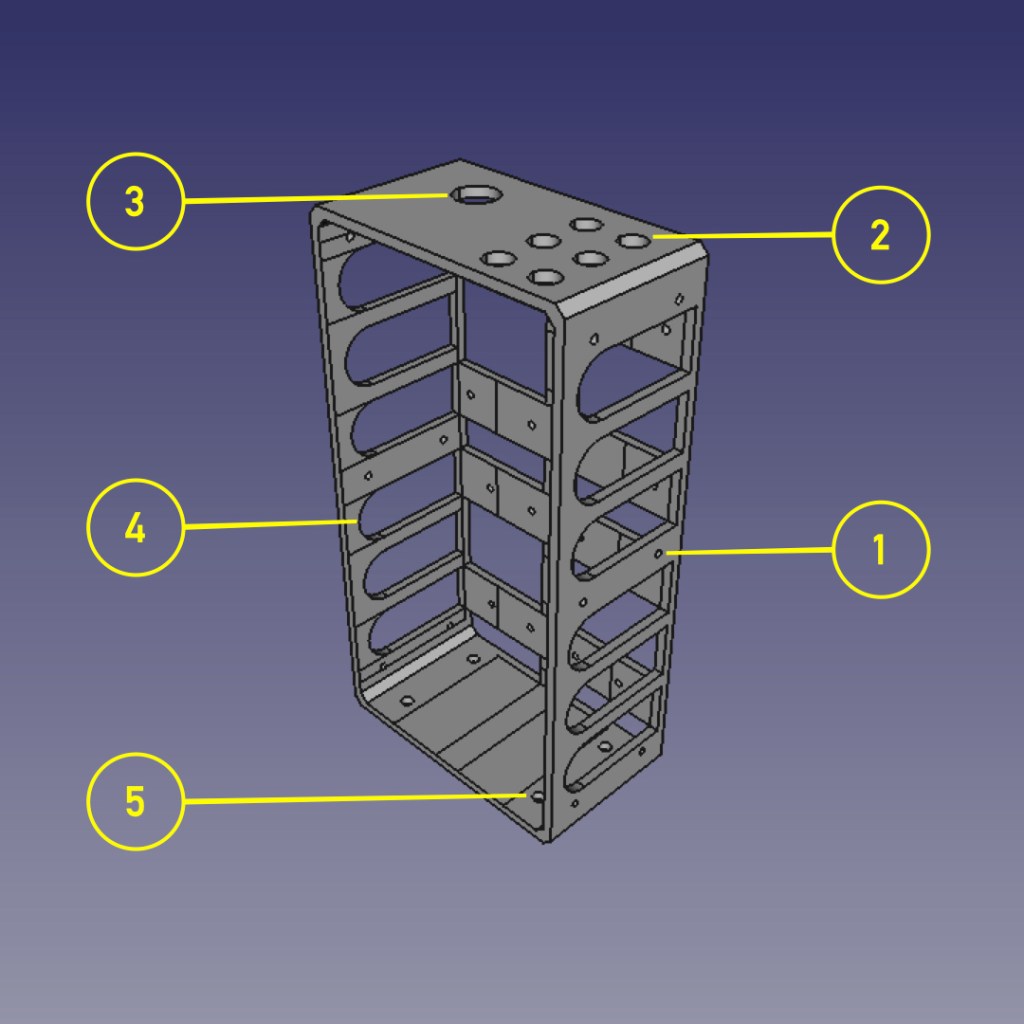
Screenshot 1
La structure interne intègre des perforations destinées à l’assemblage par boulonnage des enveloppes internes et externes.
Les emplacements pour les 6 connecteurs de type Jack en sorties.
L’emplacement pour le presse-étoupe du câble d’entrée, issu du convertisseur de puissance.
Le design global de cette structure a été optimisé pour permettre une impression 3D sans recours à des supports pour les surplombs, afin de réduire la consommation de matière et de simplifier le processus de fabrication.
La structure interne est pourvue de perçages permettant le boulonnage des armoires sur le sol du local électrique, assurant ainsi leur stabilité lors de la manipulation des portes, des boutons-poussoirs ou des interrupteurs.
Screenshot 2
Renforts latéraux pour accroitre la rigidité de la structure
Chanfrein pour prendre en compte le pli des panneaux de l’enveloppe externe.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
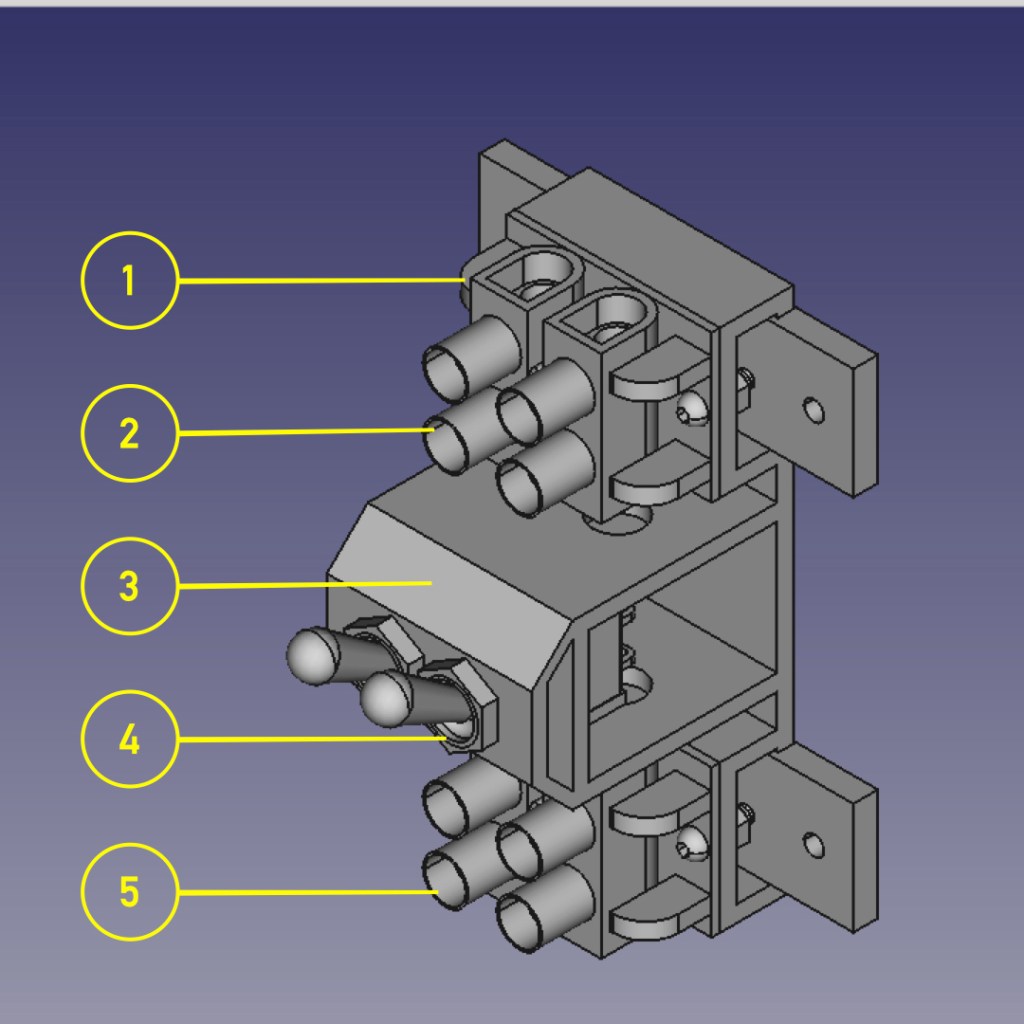
Modélisation 3D du module sectionneur des armoires électriques du diorama
Screenshot 3 : Sectionneur – Aperçu 3/4 face
Screenshot 4 : Sectionneur – Aperçu 3/4 arrière
Présentation générale
Le sectionneur de l’armoire de distribution électrique permet d’isoler le réseau électrique desservi par l’armoire, de l’alimentation en énergie électrique.
Description détaillée
Screenshot 3
Guide de fixation des borniers de câblage
Bornier de câblage d’entrée réalisé à partir d’un domino électrique 230V 1,5mm2.
Structure de montage du sectionneur réalisée par impression 3D.
Deux interrupteurs à bascule comme sectionneur coupe circuit.
Bornier de câblage de sortie réalisé à partir d’un domino électrique 230V 1,5mm2.
Screenshot 4
Patte de fixation du module sectionneur sur la structure interne de l’armoire électrique.
Structure du module sectionneur réalisé par impression 3D.
Perforation pour faciliter le montage des borniers de câblage.
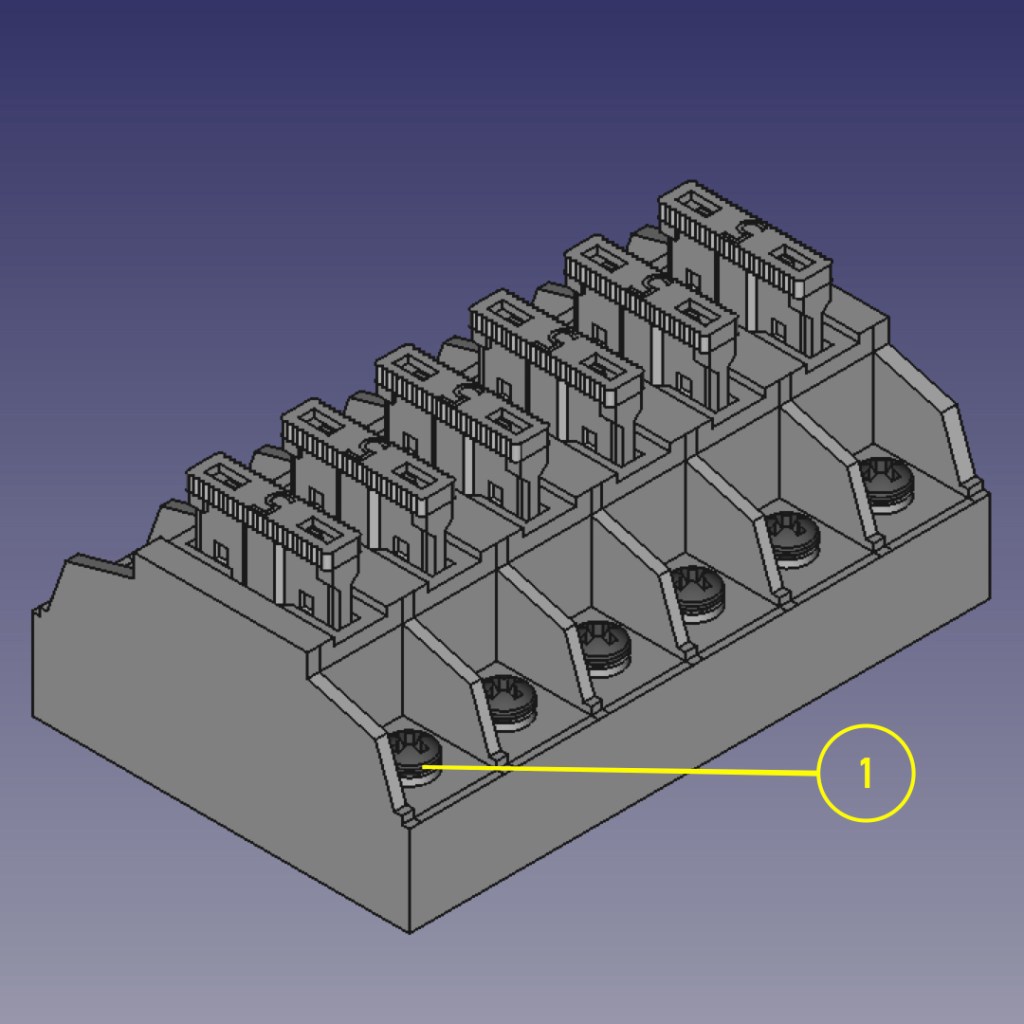
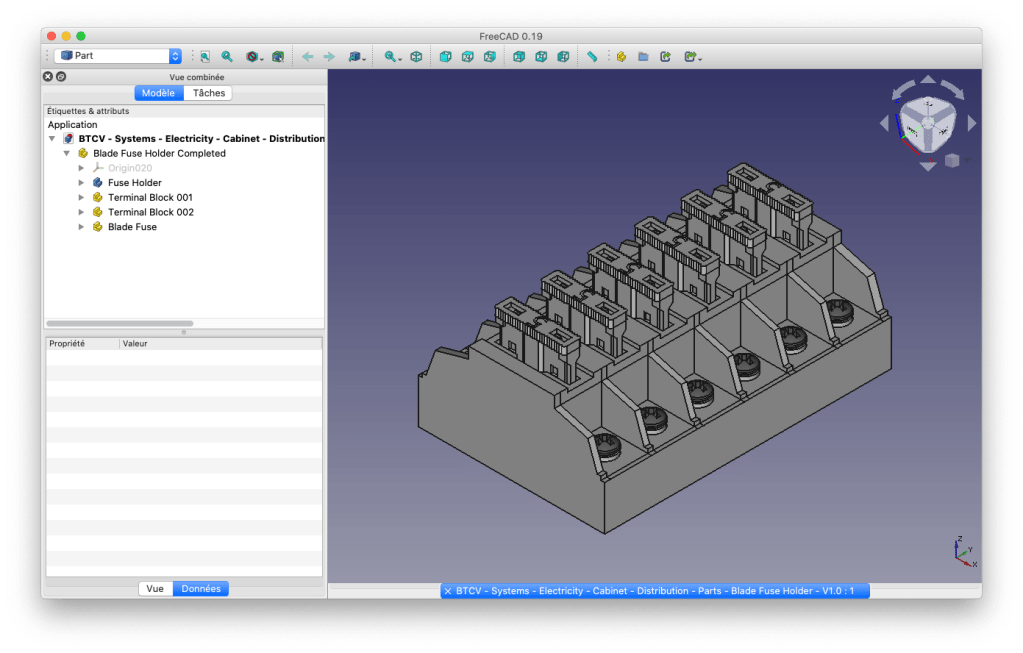
Modélisation 3D du porte fusible des armoires électriques du diorama
Screenshot 5 : Porte fusible – Aperçu 3/4 face
Screenshot 6 : Porte fusible – Aperçu 3/4 face
Présentation générale
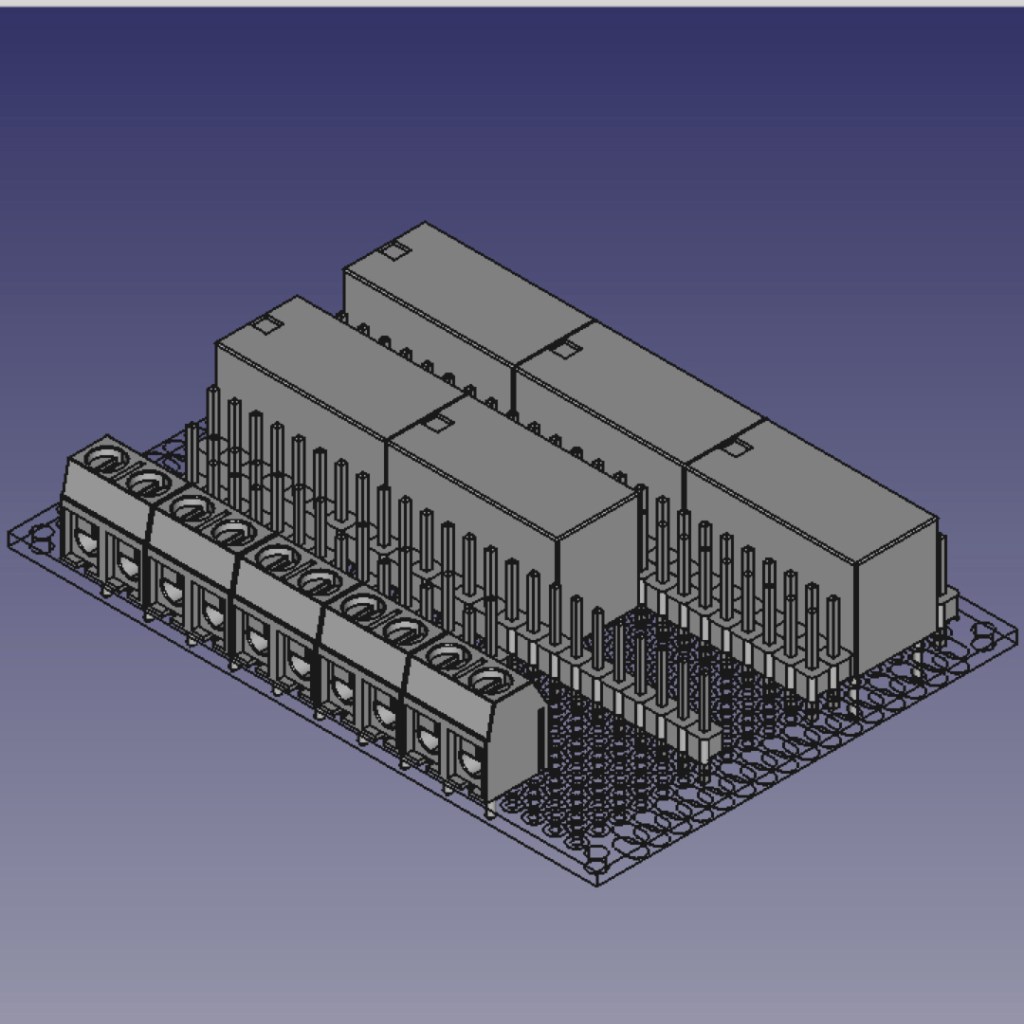
Les fusibles protègent les circuits électriques contre les surintensités. Pour protéger les 6 circuits de sorties de l’armoire de distribution, 6 portes fusibles sont donc nécessaires. Cependant, pour des raisons d’encombrement de ces portes fusibles et pour s’assurer que le câblage associé soit simple, la solution retenue repose sur un porte fusible intégré de 6 fusibles plats.
Description détaillée
Screenshot 5
Borniers de câblage des bornes positives des circuits.
Fusibles plats.
Screenshot 6
Borniers de câblage des bornes négatives des circuits.
Modélisation 3D des composants de l’armoire électrique avec FreeCAD
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
Un aperçu de quelques designs complémentaires conçus spécifiquement pour les besoins du projet BATLab112.
GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception détaillée, afin de valider les assemblages mécaniques entre ces différents sous-ensembles.
Voir aussi
Des articles sur l’avancement du réseau de distribution électrique du diorama
Cet article présente l’implantation générale des cartes électroniques du prototype de la console de commande des équipements électriques de la Batcave du projet BATLab112.
Le cahier des charges met en avant la présence de quatre équipements industriels nécessaires pour la maintenance de la Batmobile ; la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Chacun de ces équipements doit être piloté soit en mode automatique, à partir d’un système centralisé, soit en mode manuel. Pour chaque équipement industriel, les commandes manuelles sont regroupées sur une console de commande, assurant aussi l’interface avec le système central.
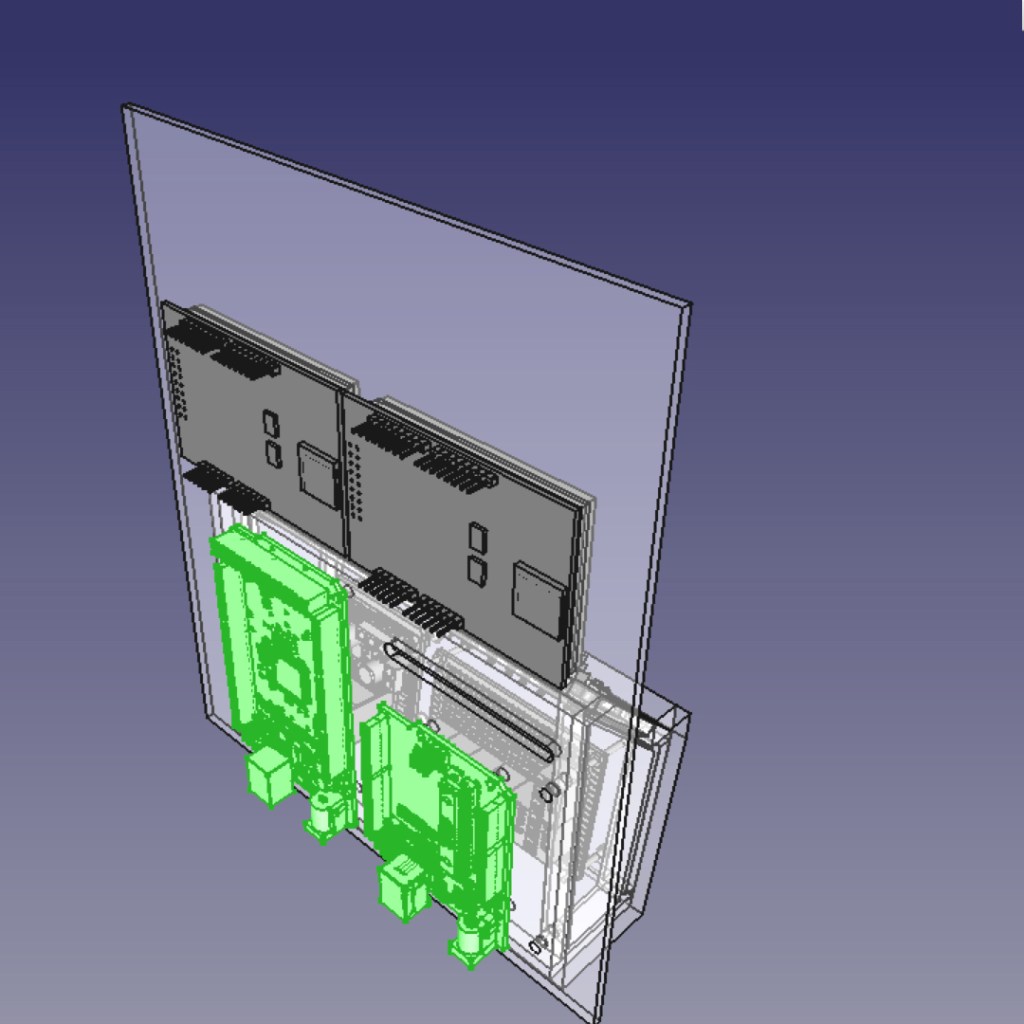
Cette console de commande est composée de 3 cartes électroniques, 2 cartes Arduino et 2 écrans tactiles. Seules, les cartes du panneau des commandes et des relais sont réalisées pour les besoins spécifiques du projet BATLab112. Les autres cartes sont des cartes manufacturées, choisies pour leurs caractéristiques techniques ainsi que leurs dimensions conforme avec les dimensions du diorama.
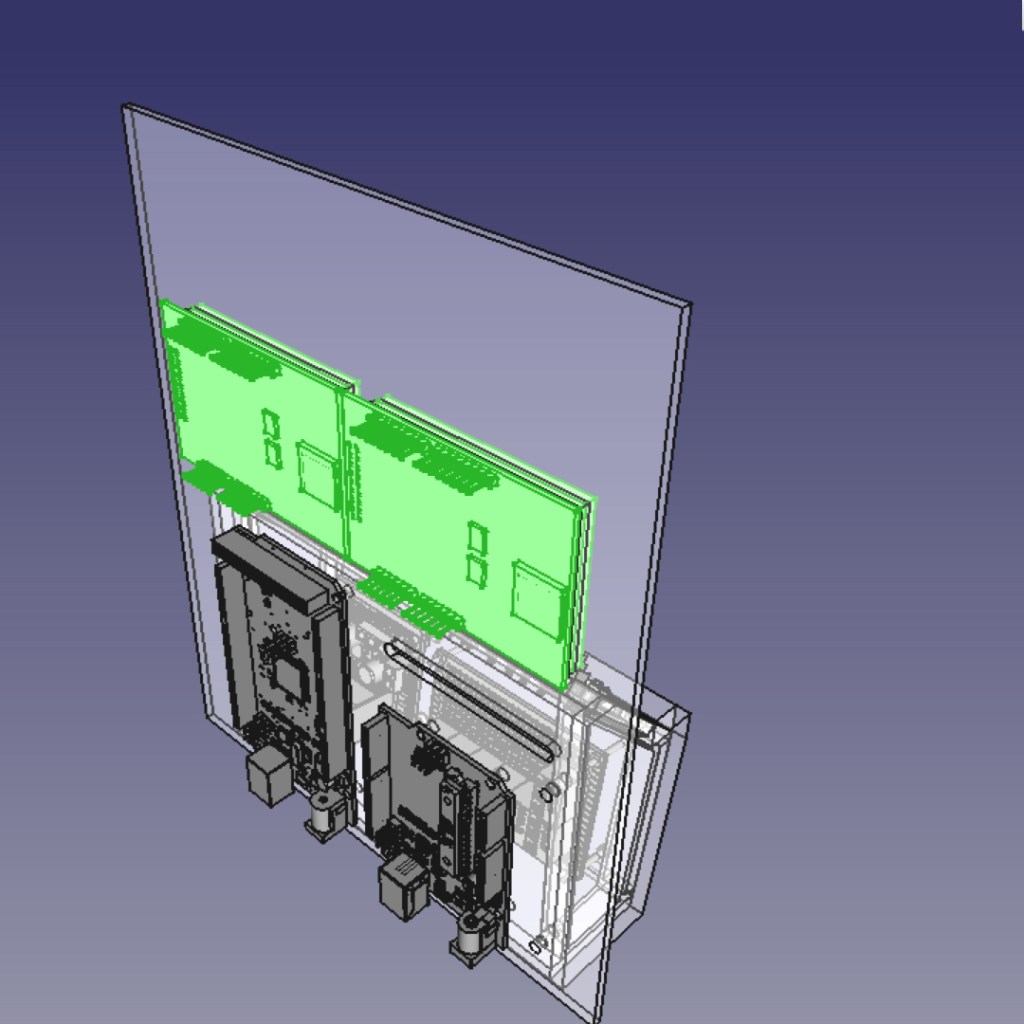
Cartes électroniques de puissance
Les deux cartes électroniques de puissance sont implantées à l’intérieur de la console de commande. Les deux cartes sont maintenues par 4 vis contre la face avant de la console. La face composants des cartes est accessible depuis l’arrière de la console, avant fixation du panneau de support des écrans.
La carte relais (à gauche) créée pour le projet BATLab112. Ces relais sont utilisés dans les commandes en logique câblée ; auto maintien.
La carte de contrôle des mini moto-réducteurs 6VDC est réalisée à partir d’un contrôleur double pont L298N. Elle permet de sélectionner le sens de rotation des moteurs.
Cartes Arduino
Les cartes Arduino Uno et Arduino Mega sont implantées à l’arrière du panneau de support des écrans des contrôle. La face de dessus face visible pour permettre le câblage des cartes avec les autres cartes électroniques de la console de commande.
La carte Arduino Mega pilote l’écran principal, en charge de l’affichage et de l’horodatage des commandes activées par le panneau des commandes.
La carte Arduino Uno, pilote l’écran secondaire en charge de l’affichage de l’état général de l’équipement pilote (Bras robotique, Pont roulant, Plateforme rotative, Pont élévateur …).
Panneau des commandes
La carte électronique du panneau des commandes, développée pour le projet BATLab112 est implantée dans la face inclinée du pupitre de commande. Cette carte supporte tous les organes de commande ; boutons poussoirs, bouton d’arrêt d’urgence, commutateurs, voyants … Le câblage de cette carte avec les autres cartes électroniques de la console de commande, s’effectue par l’intérieur du pupitre, avant fixation du panneau de support des écrans de contrôle.
Ecrans de contrôle
Modélisation 3D
FreeCAD
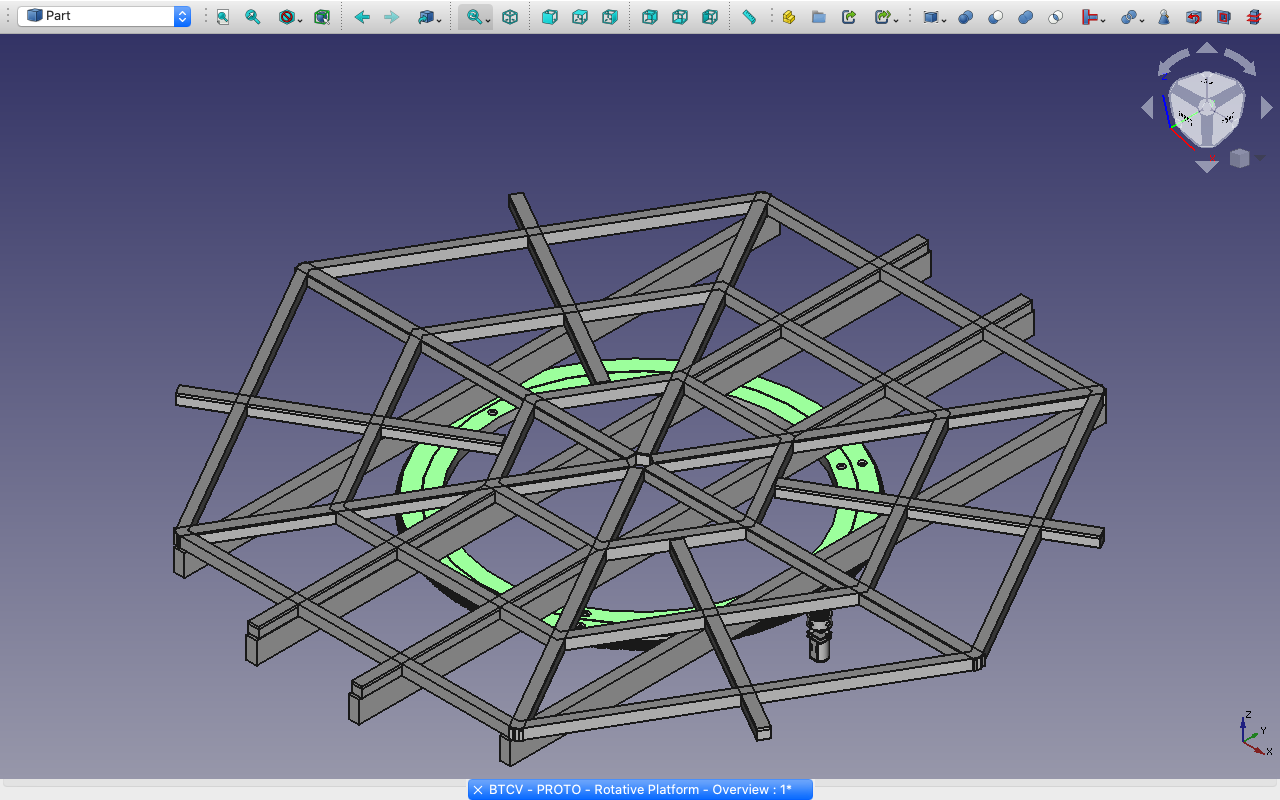
La modélisation de la plateforme rotative de la Batmobile équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception préliminaire, afin de valider les assemblages mécaniques entre ces différents sous-ensembles et la structure de la console de commande.
La réalisation du diorama technique du projet BATLab112 requiert la mise en œuvre d’une infrastructure de commande fiable, didactique et cohérente avec les fonctions attendues du dispositif final. La console de commande, élément central de l’interface opérateur, constitue à ce titre un module critique. Elle assure l’articulation entre les commandes manuelles, les systèmes d’automatisation futurs et l’ensemble des actionneurs mécaniques, notamment le moteur de la plateforme rotative.
Après validation du concept mécanique de la console et de l’agencement des composants électroniques (écrans, boutons, commutateurs, microcontrôleurs), une première étape de prototypage électronique a été entreprise. L’objectif de cette phase est de vérifier la pertinence des choix techniques, d’évaluer l’ergonomie des modes de commande et de valider les comportements fonctionnels avant passage à une intégration définitive.
Le présent document propose une description détaillée de cette première version électronique, de son architecture générale aux essais menés sur maquette, en adoptant une démarche rigoureuse conforme aux standards de conception en électronique appliquée.
+ d’infos sur la conception préliminaire de la console de commande :
La structure électronique de la console de commande repose sur un schéma de principe élaboré à l’aide du logiciel libre KiCad, choisi pour sa flexibilité, sa richesse fonctionnelle et sa compatibilité avec les environnements de prototypage rapide.
L’architecture est organisée en deux sous-systèmes principaux :
Le module de gestion des commandes manuelles, intégrant les commandes de l’opérateur (boutons, commutateurs, voyants).
Le module d’interface de puissance, assurant la mise en forme et la distribution des signaux vers le moteur à courant continu responsable de la rotation de la plateforme.
Cette séparation fonctionnelle répond à un impératif de lisibilité du schéma mais également à une logique de modularité favorisant les évolutions ultérieures.
KiCad
Ce schéma électronique est réalisé avec la suite logicielle KiCad distribuée librement.
La partie supérieure du schéma se divisent en 5 parties dédiées à la gestion des commandes. La partie inférieure du schéma est dédiée à l’interface entre les commandes et l’alimentation du moteur de rotation de la plateforme.
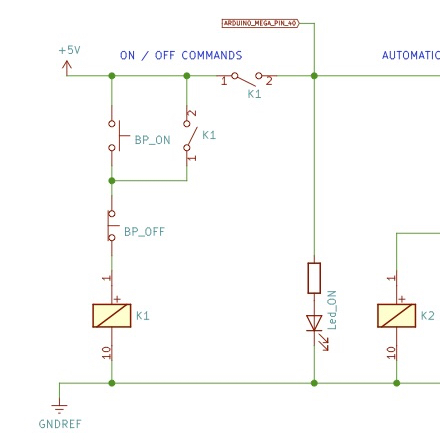
Mise sous tension – arrêt général
La mise sous tension générale est réalisée au moyen d’un relais à auto-maintien, solution fréquemment adoptée dans les environnements industriels.
Le principe consiste à maintenir l’alimentation du circuit tant que le relais reste excité, l’opérateur pouvant interrompre cette excitation via un bouton poussoir d’arrêt. Cette architecture garantit la sécurité fonctionnelle du dispositif tout en simplifiant le comportement de remise en service.
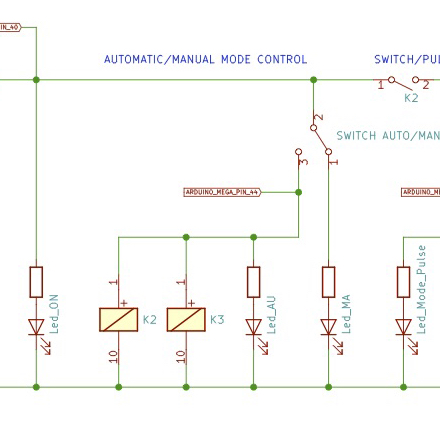
Sélection du mode Auto / Manuel
Un commutateur à deux positions permet de choisir entre un mode automatique et un mode manuel. Ce choix conditionne la provenance des signaux de commande :
En mode manuel, les boutons opérateur commandent directement les relais gérant le sens de rotation.
En mode automatique, ces mêmes relais sont pilotés par l’unité d’automatisation (qui sera intégrée dans une phase ultérieure du projet).
BP_ON : Bouton poussoir de commande du relais K1
K1 : Relais dont un contact est utilisé pour assurer son auto-maintien. Le deuxième contact est utilisé pour mettre sous tension tout le reste du montage.
BP_OFF : Bouton poussoir de coupure de l’alimentation du relais K1.
Led_ON : Led dont l’allumage dépend du deuxième contact du relais K1.
SWITCH AUTO/MAN : Commutateur permettant d’alimenter soit les relais K2, K3 et la Led Led_AU, soit la Led Led_MA seule.
K2 : Relais dont un des contacts autorise la mise sous tension de la suite du montage.
K3 : Relais dont les contacts aiguilles vers l’interface de puissance du moteur, les commandes manuelles ou les commandes automatiques.
Led_AU : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position AUTO.
Led_MA : Led dont l’allumage est commandé par le commutateur SWITCH AUTO/MAN en position MAN.
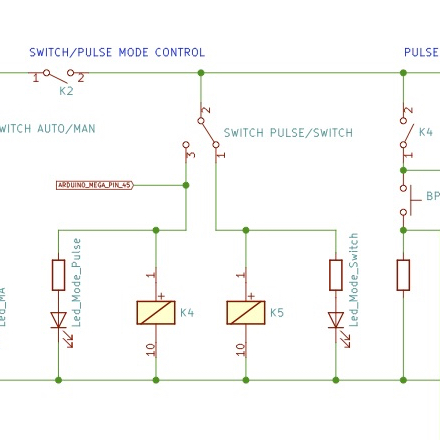
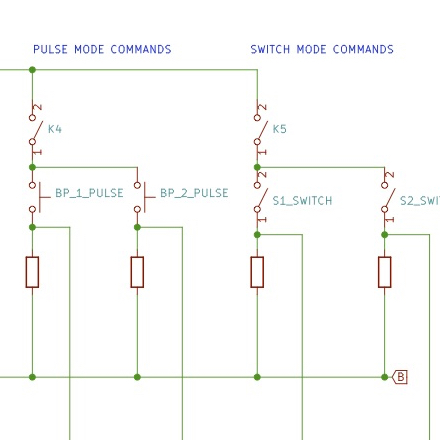
Sélection du mode Switch / Pulse
La sélection entre le mode switch et le mode pulse est assurée par un commutateur à 2 positions.
SWITCH PULSE/SWITCH : Commutateur permettant d’alimenter soit K4 et Led_Pulse, soit K5 et Led_Switch.
K4 : Relais dont un contact va autoriser les commandes manuelles en mode pulse.
K5 : Relais dont un contact va autoriser les commandes manuelles en mode switch.
Led_Pulse : Led dont l’allumage est commandé par le commutateur en position Pulse.
Led_Switch : Led dont l’allumage est commandé par le commutateur en position Switch.
Switch & Pulse Commands
Les commandes manuelles en mode pulse sont assurées par des boutons poussoirs classiques. Il est nécessaire de maintenir l’appui sur le bouton poussoir maintenir la commande.
Les commandes manuelles en mode switch sont assurées par des boutons poussoirs à maintien de position. un premier appui bloque le bouton poussoir en position pour activer la commande. Un second appui, libère la position du bouton poussoir est arrête la commande.
PB1_PULSE: Bouton poussoir de commande de la rotation du moteur dans un sens.
PB2_PULSE : Bouton poussoir de commande de la rotation du moteur dans l’autre sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans un sens.
PB1_SWITCH : Bouton poussoir à maintien de position pour commander la rotation du moteur dans l’autre sens.
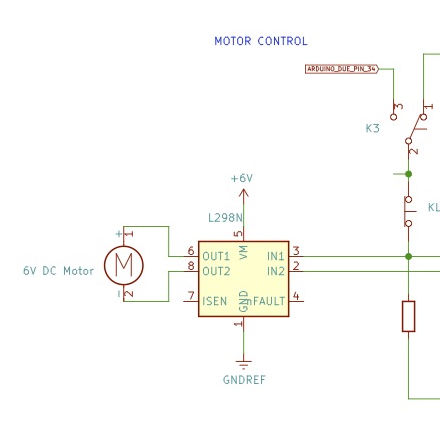
Controller commands
Les contacts du relais K3 permettent d’aiguiller vers le moteur, soit les signaux des commandes manuelles soit ceux des commandes automatiques.
LED_R1 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
LED_R2 : Led dont l’allumage est commandé par une commande pulse ou switch pour un même sens de rotation du moteur.
DC Motor controller
L’interface de puissance qui assure le pilotage du sens de rotation du moteur à partir des signaux de commandes numériques manuelles ou automatiques est une carte électronique basée sur un L298N.
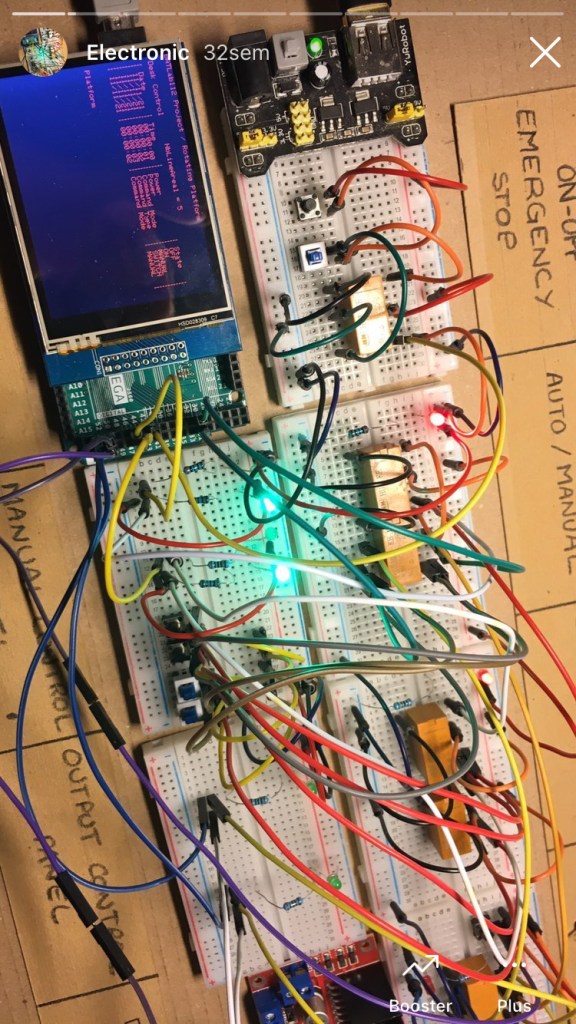
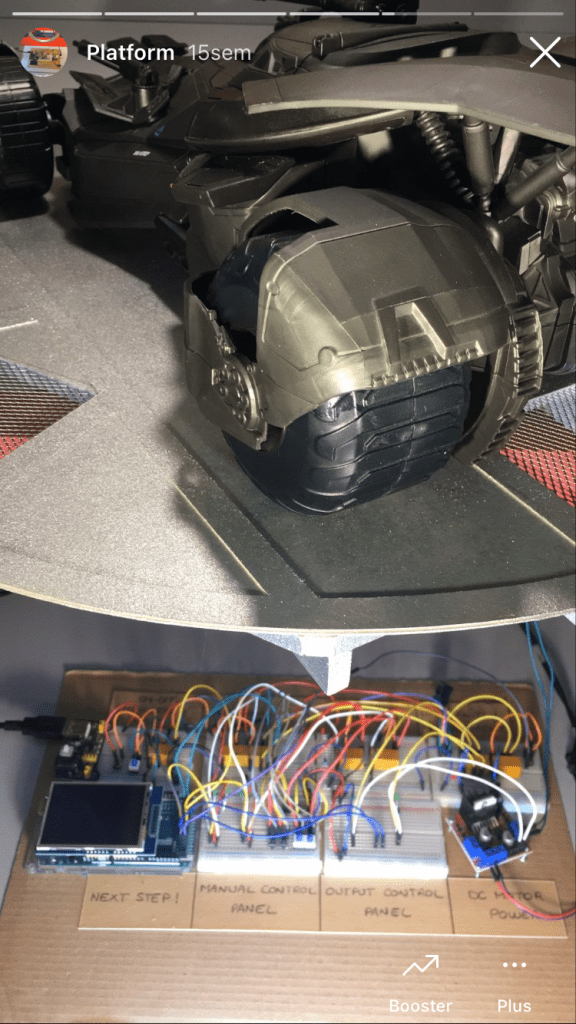
Maquette
Afin de valider ces choix, une maquette physique du circuit a été réalisée. Le câblage sur plaque expérimentale (protoboard) a permis :
de vérifier la cohérence des connexions ;
de confirmer la compatibilité électrique entre les éléments ;
d’effectuer une série de tests fonctionnels (mise sous tension, bascules de modes, commandes moteurs).
Cette démarche de prototypage intermédiaire est conforme aux bonnes pratiques de l’ingénierie électronique, permettant de déceler d’éventuelles incohérences avant la production d’un circuit imprimé ou l’intégration dans l’environnement mécanique définitif.
Test de fonctionnement
Cartes électroniques
Conclusion
Cette première itération électronique de la console de commande du diorama BATLab112 constitue une étape structurante du projet. Elle permet de valider l’ensemble des fonctions de base : gestion de la mise sous tension, sélection des différents modes de commande, pilotage du moteur de la plateforme rotative et évaluation de l’ergonomie opérateur.
L’architecture modulaire mise en place offre une marge significative pour les développements ultérieurs, notamment :
l’intégration d’un système de contrôle automatisé basé sur Arduino ou équivalent,
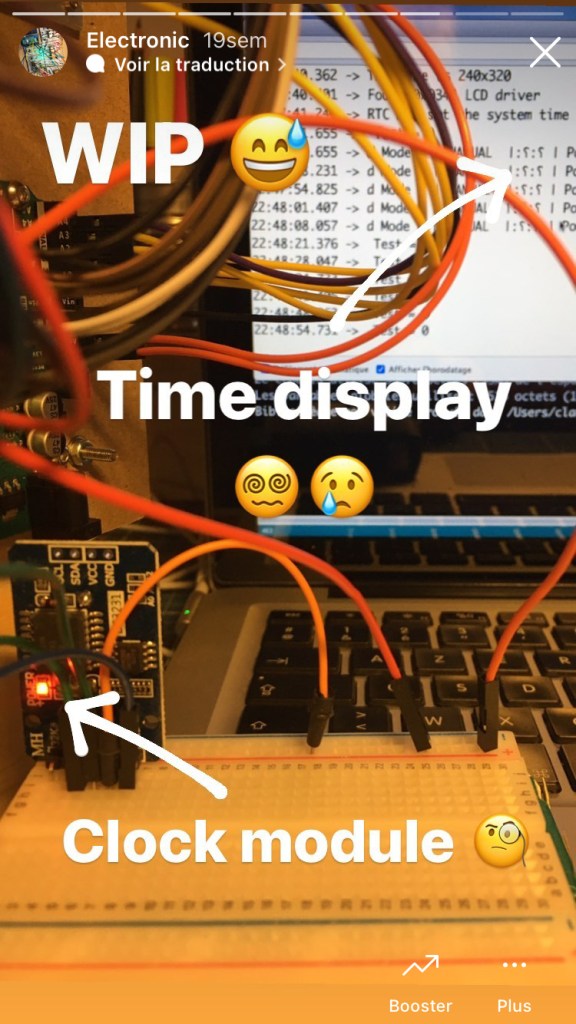
la mise en place d’un affichage en temps réel via un écran TFT 2,8’’,
la migration vers un câblage définitif en adéquation avec les contraintes mécaniques du diorama.
En ce sens, ce prototype représente un jalon essentiel dans la transition entre la conception préliminaire et la validation fonctionnelle du dispositif final, illustrant une démarche académique structurée et reproductible.
La réalisation du prototype du pont roulant bipoutre du diorama de la Batcave fait suite à la conception préliminaire de cet équipement. Voir l’article …
La structure du pont roulant est fabriquée en bois pour des raisons de facilité d’usinage, essentielle lors de cette phase de prototypage, et de maîtrise de l’impact environnementale du projet. Compte tenu des dimensions de certaines pièces constituant cet équipement, il n’était de toute façon pas envisageable de les imprimer avec une imprimante grand public. La perspective d’une fabrication en résine ou par impression professionnelle n’était pas non plus compatible avec le budget prévisionnel du projet.
Les pièces d’assemblage sont imprimées pour des raisons de faisabilité technique et de précision de fabrication. Les principaux sous-ensembles du pont roulant bipoutre sont assemblés par boulonnage (M2).
Les photos utilisées dans cet article ont été prises avant la phase de ponçage et de finition !
Vues de détails
Pièces en bois
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite fabriquées par le 8FABLAB à Crest dans la Drôme.
Pièces d’assemblages
Ces pièces ont d’abord été conçues sous le logiciel de modélisation 3D FreeCAD V19 pour être ensuite imprimées par Benoit, membre de la communauté du projet BATLab112.
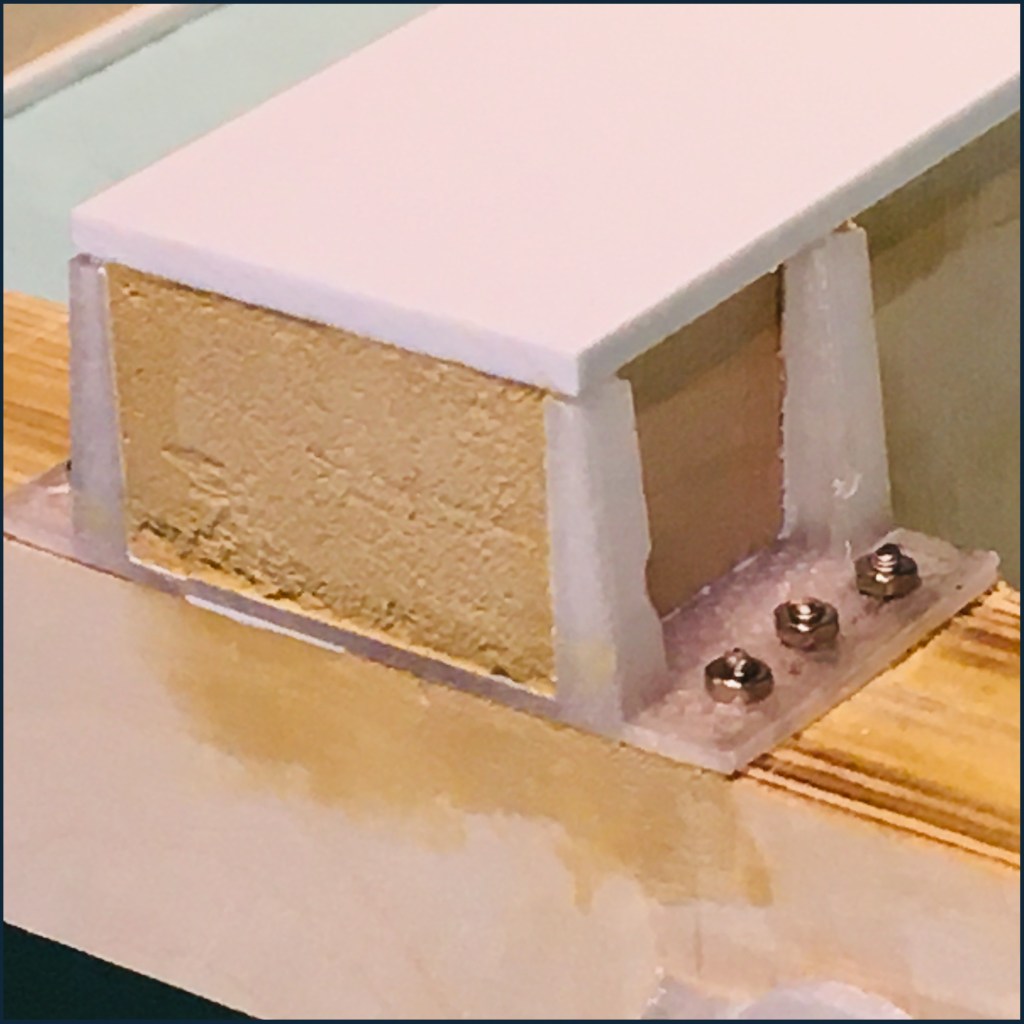
Platine d’assemblage poutre et sommier du pont roulant.
Deux platines d’assemblage sont collées à chaque extrémité des poutres. Ces trois pièces constituent un sous-ensemble. La platine permet le montage et démontage de ce sous-ensemble sur les sommiers du pont roulant par boulonnage.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un montage le plus ajusté possible.
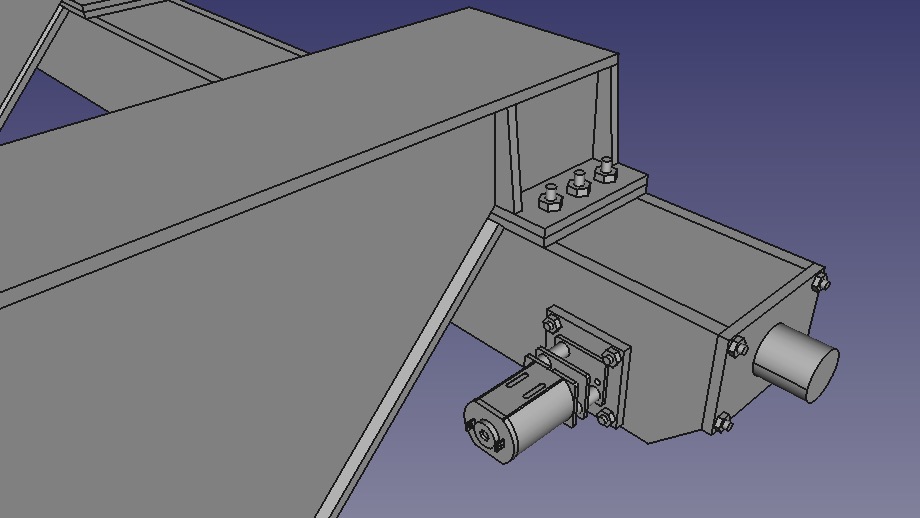
Support de fixation des micros moteurs
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Sa forme permet de maintenir un micro moteur 6VDC. Un système de fixation supplémentaire reste à l’étude pour le moteur.
Les contraintes de réalisation de cette pièce sont relatives à la précision d’impression ainsi que sa rigidité pour assurer un maintien du moteur.
Plaque de protection
Cette pièce est boulonnée via des tiges filetées ancrées dans le sommier. Aucune contrainte particulière n’est requise pour la réalisation de cette pièce, destinée à protéger et maintenir en place l’axe de la roue libre.
Test fonctionnel
Cette vidéo a été réalisée en mode expérimentale, à partir d’une structure principale incomplète. Son objectif était de montrer le fonctionnement général du pont roulant bipoutre.
Validation du design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire
Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite aux contraintes d’assemblage rencontrées .
Prototype n°1
La fabrication des pièces principales en bois est satisfaisante même si leur poids reste important. Les différents éléments constituant les poutres du pont roulant ont été assemblés par collage. L’ensemble est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Validation du design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le point fonctionnel critique sur ce prototype est la liaison pivot des axes de rotation des roues. Il est impératifs que ces liaisons soit la plus fluide possible pour autoriser l’utilisation de micro moteur. Le poids non négligeable de la structure en bois étant déjà un handicap il est impératif de contrôler cette fonction.
Prototype n°1
L’essieu d’entrainement est réaliser à partir d’un axe en aluminium, des roulements à billes de guidage et une poulie à gorge en V pour la roue. L’essieu de roue libre est réalisé à partir d’un axe et d’une poulie à gorge en V.
Validation de la résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids des deux bras robotiques ainsi que du Trolley sur lequel ils sont fixés. Cependant, les bras robotiques étant en cours de fabrication ce test n’a pu être réalisé.
Toutefois ce test a mis en évidence la trop grande souplesse de la structure supportant les rails de guidage du pont roulant.
Test de la motorisation du système
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
Le couplage de l’axe des roues motrices avec les moteurs est assuré par un assemblage « en force » entre l’axe du moteur et l’axe de la roue.
La prochaine version de cette transmission devra assurer un couplage entre l’axe du moteur et celui de la roue plus durable.
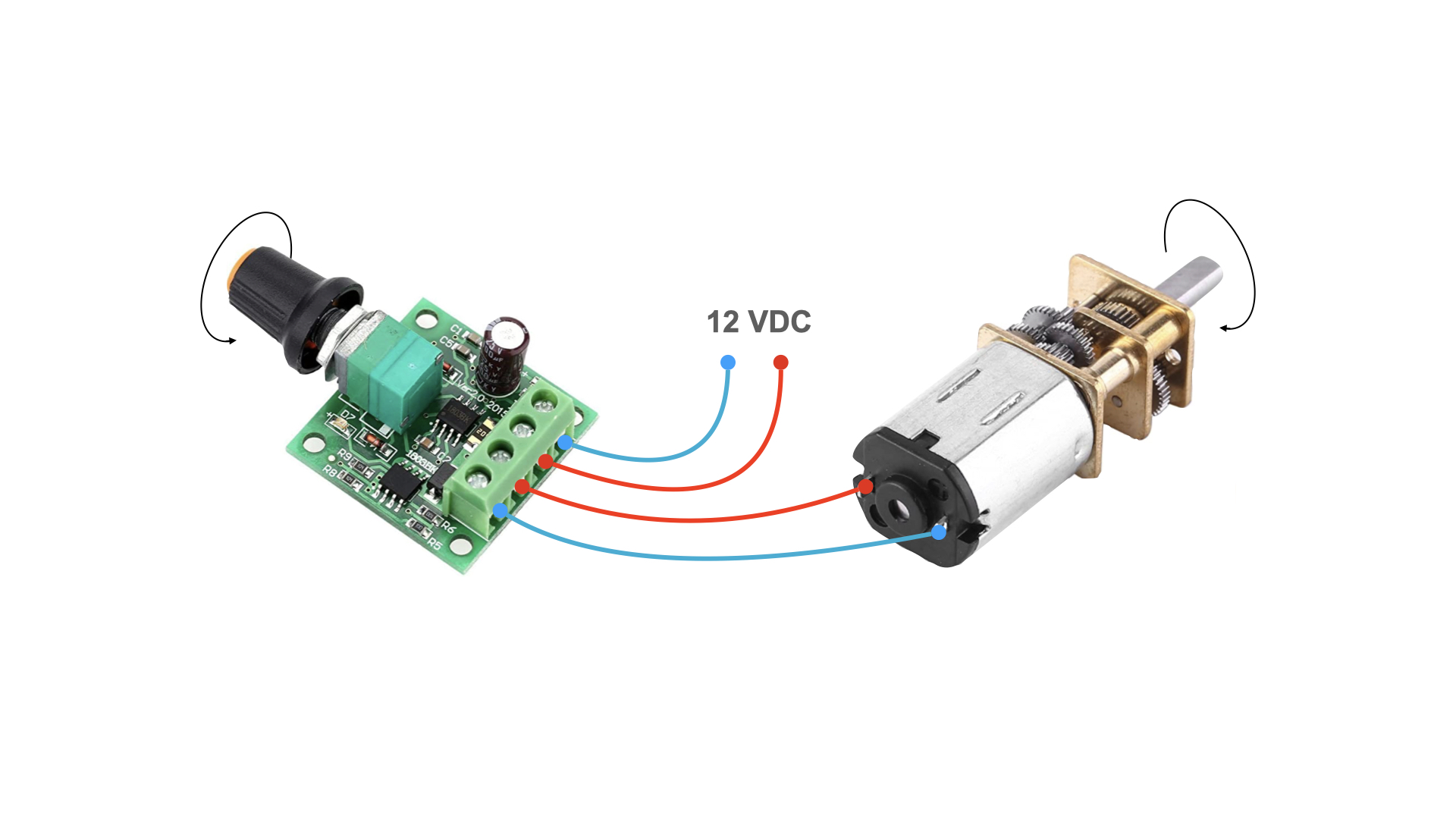
Moteur
Ce test de motorisation a été réalisé avec deux micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler de manière identiques les tensions d’alimentation des moteurs et ainsi ajuster leurs vitesses de rotation à des valeurs identiques. Le couple de ces moteurs est suffisant pour entrainer l’ensemble ; pont roulant + charge. Le test de motorisation est donc validé.
Conclusion
Même si ces premiers tests ont été réalisés dans des conditions non optimales, ce premier prototype du pont roulant bipoutre équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Il est raisonnable de penser que le fonctionnement de cet équipement sera amélioré sur une structure complète et plus aboutie.
Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
Cet article présente la réalisation du prototype de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du prototype de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
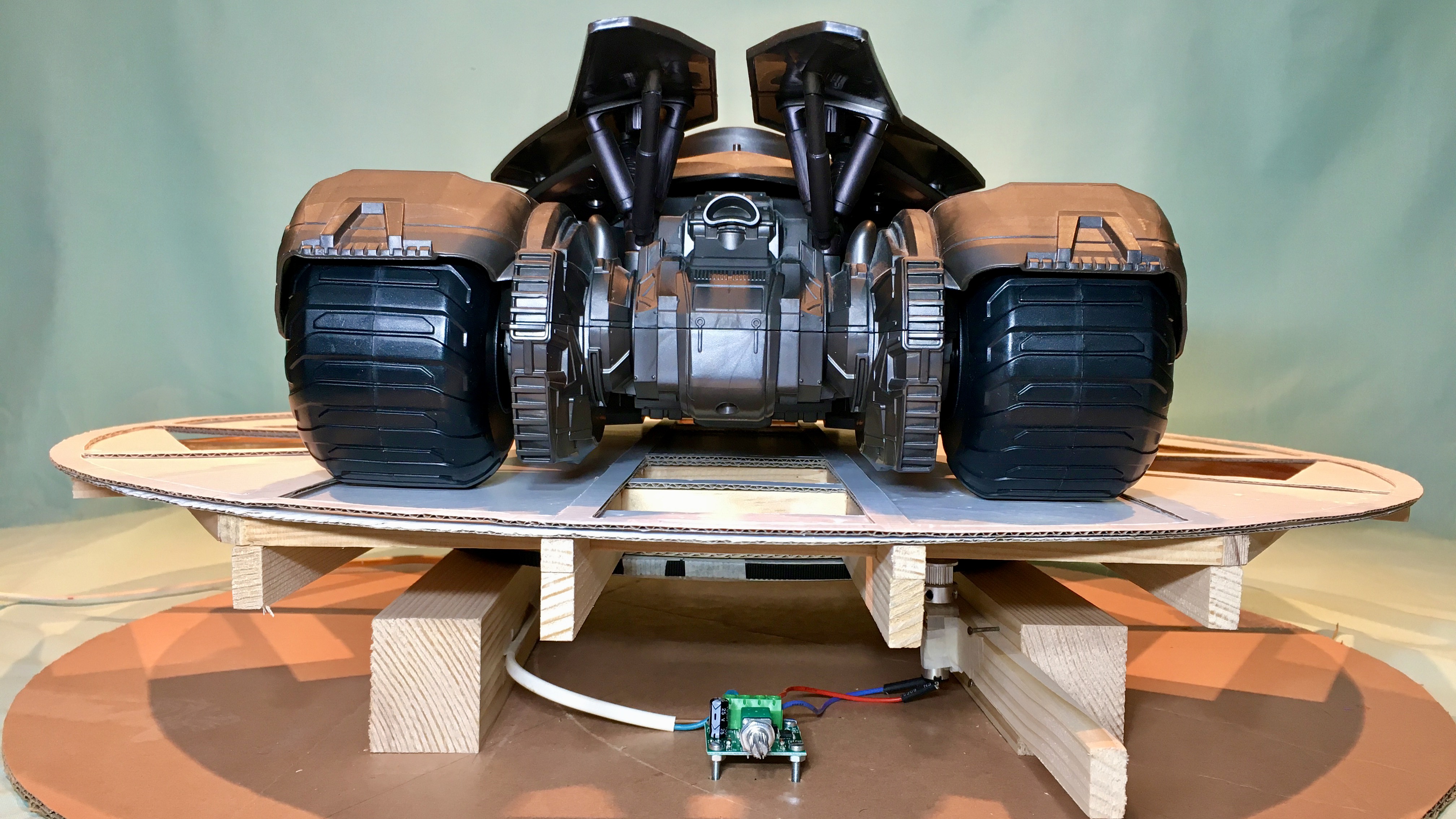
La structure de la plateforme a été fabriquée en bois pour des raisons économiques mais aussi de facilité et rapidité de mise en oeuvre, le montage ayant pu être réalisé par simple collage. La plaque de couverture a été fabriquée en carton. La liaison pivot est assurée par un roulement à bille de type Lazy Susan, généralement utilisé pour des plateaux tournant de table.
La réalisation de ce premier prototype de la plateforme rotative de la Batcave du projet BATLab112 poursuit plusieurs objectifs. Il s’agit dans un premier temps de valider le design issu de la conception préliminaire et dans un deuxième temps de tester la motorisation de ce système.
Valider le design technique
Valider le design fonctionnel
Valider le design mécanique
Tester la motorisation du système
Vues de détails
Design technique
Ce prototype doit tout d’abord permettre de s’assurer de la faisabilité technique du design issu de la conception préliminaire.
Conception préliminaire
Même si la plateforme rotative a fait l’objet d’une phase de conception préliminaire en 3D avec le logiciel FreeCad, ce prototype permet de faire des ajustements nécessaires suite à des différences de côtes rencontrées lors de la réception de pièces manufacturées.
Prototype n°1
Les différents éléments ont été assemblés par collage. La fabrication de la structure en bois est plutôt satisfaisante. Même si les imperfections des pièces de bois utilisées ne permettent pas une précision au millimètre, cette structure présente une surface d’appui pour le plateau suffisamment plane. Elle est plutôt solide et peut être manipulée avec un minimum de soin. La faisabilité technique de la structure est donc validée.
Pour améliorer la précision de fabrication, une solution consisterait à rectifier toutes les pièces de bois avant assemblage ou d’opter pour des profilés aluminium.
Design fonctionnel
Ce prototype doit permettre de s’assurer de la fonctionnalité du design issu de la conception préliminaire.
Conception préliminaire
Le poids total, de la plateforme et du modèle réduit de la Batmobile, doit être le plus faible possible, pour autoriser l’utilisation d’un micro-moteur pour la rotation, afin d’être conforme avec les exigences d’échelle 1/12 du projet. Il s’agit donc ici de contrôler particulièrement si l’utilisation de matériaux légers est compatible avec l’assemblage du roulement à bille plus lourd.
Prototype n°1
L’assemblage de la structure en bois sur le roulement à billes de type Lazy Susan est réalisé grâce à 1 cercle de carton. Ce cercle est collé sur la structure. Les pions (en blancs sur la photo) fixent l’ensemble sur le roulement à billes. Cet assemblage est satisfaisant pour solidariser la structure en bois avec la couronne extérieure du roulement à billes. Il autorise la rotation de l’ensemble par rapport à la couronne intérieure. Le design fonctionnel est donc validé.
Une amélioration consisterait à réaliser le cercle d’assemblage entre la structure en bois et le roulement à billes dans un matériau plus rigide que du simple carton d’emballage ce qui éviterait les éventuelles déformations.
Résistance mécanique
Ce prototype doit permettre de contrôler la capacité de la plateforme à supporter le poids du modèle réduit de la Batmobile.
Conception préliminaire
Le plateau de la plateforme doit être d’une épaisseur très mince (inférieure à 2mm), pour des raisons de cohérence avec l’échelle 1/12 du projet. Il est nécessaire de s’assurer d’une part que sa réalisation puisse se faire dans un matériau suffisamment léger (ici du carton) pour ne pas rendre l’ensemble trop lourd pour la capacité des moteurs du pont élévateur et de la plateforme. D’autre part, il est aussi nécessaire de s’assurer que ce plateau ne se déforme pas sous le poids du modèle réduit de la Batmobile.
Prototype n°1
Le plateau de la structure est découpé dans une plaque de carton d’emballage d’épaisseur 1mm. Dans un premier temps, ce plateau est simplement posé sur la structure en bois. L’ensemble structure et plateau supporte tout à fait le poids du modèle réduit de la Batmobile. Le plateau ne se déforme pas sous le poids de la Batmobile. L’architecture de la structure de la plateforme associé à un plateau de faible épaisseur est donc validée.
Une amélioration consisterait à réaliser le plateau par découpe laser pour obtenir une découpe plus précise.
Motorisation
Ce prototype est aussi l’occasion de mettre en oeuvre la motorisation et la transmission du mouvement de rotation pour valider leurs dimensionnements issus de la conception préliminaire.
Transmission mécanique
L’engrenage de transmission est réalisé avec une poulie montée sur l’axe du moteur et une courroie GT2 5mm entourée autour du diamètre extérieur du roulement à billes. La courroie n’a pas été collée mais juste maintenue par du ruban adhésif. Le moteur est lui aussi simplement maintenu par du ruban adhésif contre un des supports provisoires de la plateforme. Le test est concluant malgré un montage sommaire. Cependant, ce montage ne permet pas de réaliser une rotation complète de la plateforme à cause de la présence du ruban adhésif.
La prochaine version de cette transmission devra intégrer le collage définitif de la courroie ainsi qu’une fixation plus appropriée du moteur.
Moteur
Ce test de motorisation a été réalisé avec un micro-moteur 6V à courant continu et un variateur de tension. Ce variateur est utilisé pour contrôler la tension d’alimentation du moteur et ainsi ajuster la vitesse de rotation de la plateforme. Le couple du moteur associé au rapport de réduction de l’engrenage suffit pour entrainer l’ensemble ; plateforme et modèle réduit de la Batmobile. Le test de motorisation est donc validé.
Validation fonctionnelle
Conclusion
Ce premier prototype de la plateforme rotative de la Batmobile équipant l’atelier de la Batcave du projet BATLab112 permet de valider la conception préliminaire de cet équipement. Les points d’amélioration identifiés seront pris en compte dans la prochaine version de ce prototype.
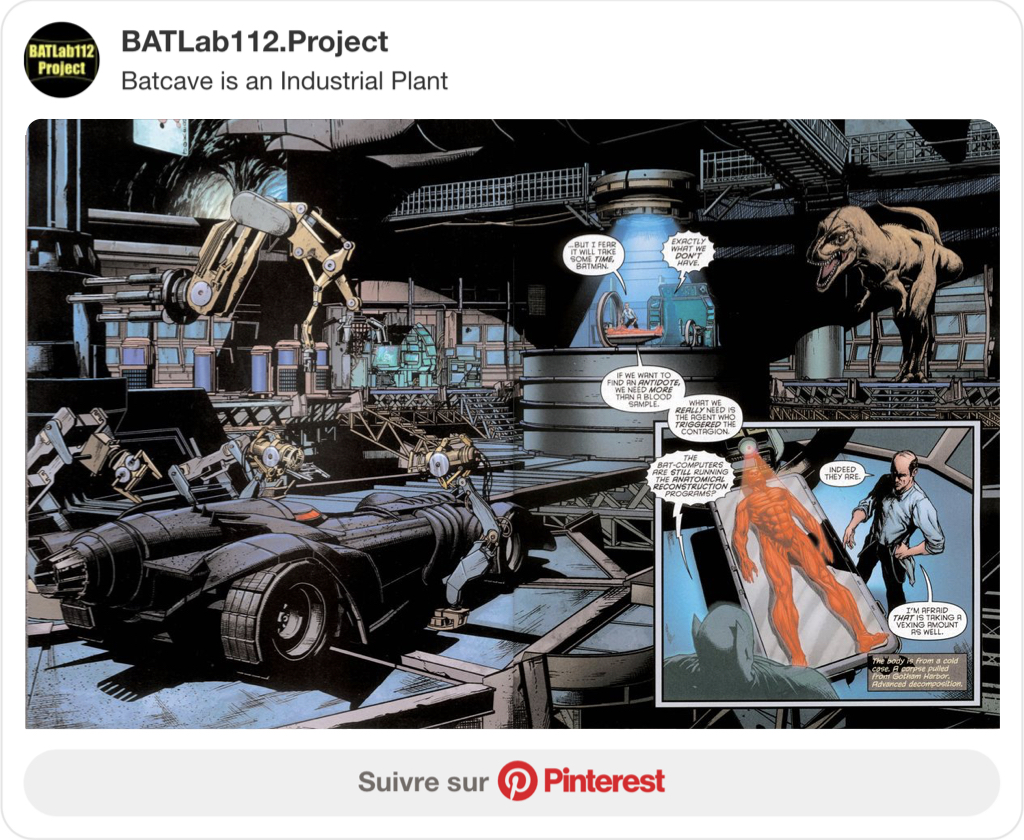
En rassemblant des technologies avancées, des équipements industriels et des dispositifs d’analyse dans un espace restreint, la Batcave apparaît comme un environnement technologique complet. Elle constitue à la fois une vitrine d’innovations et un site quasi-industriel où l’intégration, l’optimisation et l’interaction de systèmes complexes peuvent être observées dans un cadre narratif immersif.… Lire la suite…
Un espace où la technologie fonde l’identité du héros
L’un des traits distinctifs fondamentaux de Batman réside dans l’absence totale de pouvoirs surnaturels. Son efficacité repose exclusivement sur son intelligence, sa capacité d’analyse et l’usage stratégique de technologies de pointe rendues accessibles par ses ressources financières considérables. Dans ce contexte, la Batcave occupe une place centrale : loin d’être un simple repaire secret, elle constitue un environnement hautement technologique pensé pour soutenir l’action du justicier et amplifier ses capacités humaines.
L’élément emblématique de cet univers demeure le Batcomputer, véritable symbole de la supériorité technologique de Batman. Ses représentations fictionnelles évoluent au fil des époques, épousant les progrès réels de l’informatique, depuis les premiers systèmes de calcul jusqu’aux dispositifs d’intelligence artificielle avancée. Autour de cet équipement central se déploie un ensemble d’outils technologiques — drones, systèmes de surveillance automatisés, robots d’assistance — qui témoignent de l’actualisation constante du dispositif technique de la Batcave. L’ensemble forme un écosystème technologique dynamique, continuellement renouvelé pour rester en phase avec les avancées contemporaines. Ce caractère évolutif contribue à maintenir l’univers de Batman à la fois crédible, actuel et narrativement stimulant.
Une vitrine technologique et un laboratoire d’intégration
La concentration de technologies diverses au sein d’un même espace confère à la Batcave une dimension de véritable vitrine technologique. Chaque dispositif contribue à illustrer, sous une forme fictionnelle mais cohérente, un domaine particulier de l’innovation : informatique, robotique, systèmes embarqués, automatisation, communication, analyse de données, etc.
Cependant, la Batcave dépasse largement la fonction d’exposition. Elle constitue un environnement d’intégration où des technologies hétérogènes doivent coexister dans un milieu confiné, irrégulier et fortement contraint — celui d’une grotte naturelle. Les impératifs d’optimisation spatiale, d’ergonomie, de sécurité et d’efficacité opérationnelle imposent une ingénierie particulièrement sophistiquée. Cette configuration permet d’observer, même dans la fiction, les problématiques réelles que rencontrent les environnements techniques avancés : implantation des équipements, gestion énergétique, contrôle des systèmes, interactions homme–machine, compatibilité entre modules technologiques.
Un espace aux caractéristiques industrielles marquées
Au-delà des dispositifs informatiques et électroniques, la Batcave intègre également des équipements relevant de l’univers industriel. Les récits de Batman présentent ainsi des outils caractéristiques des ateliers de production ou des sites de maintenance : bras robotiques, plateformes tournantes, ponts roulants, stations de réparation et de diagnostic, infrastructures de levage ou de manutention. Ces dispositifs ne relèvent pas uniquement de l’imaginaire : ils répondent à des besoins fonctionnels liés à la construction, à la modification et à la maintenance de nombreux véhicules et équipements du héros.
À ce titre, la Batcave peut être appréhendée comme un véritable site industriel miniaturisé, où coexistent une pluralité de machines, d’outils et de systèmes autonomes dans un espace extrêmement restreint. Cette caractéristique accentue la complexité des interactions techniques et met en lumière les enjeux d’organisation, de synchronisation des activités et de gestion des risques.
Un décor ludique pour comprendre l’interaction des technologies
L’intérêt principal de la Batcave réside dès lors dans sa capacité à offrir, sous une forme narrative et ludique, une représentation densifiée de l’univers technologique contemporain. En concentrant dans un même lieu des technologies issues de domaines variés et en les insérant dans un environnement spatialement et physiquement contraint, la Batcave constitue un modèle pertinent pour appréhender les défis de l’ingénierie intégrée. Elle permet d’illustrer la complexité des chaînes technologiques, leurs interdépendances et les impératifs de performance globale qui en découlent.
En ce sens, la Batcave n’est pas seulement un décor emblématique : elle fonctionne comme un environnement technologique complet, où convergent innovation, ingénierie et mise en œuvre opérationnelle. Cet espace fictif offre ainsi un cadre particulièrement fécond pour réfléchir à l’articulation des technologies et à la manière dont elles cohabitent, se complètent et se renforcent mutuellement au service d’un objectif unique.