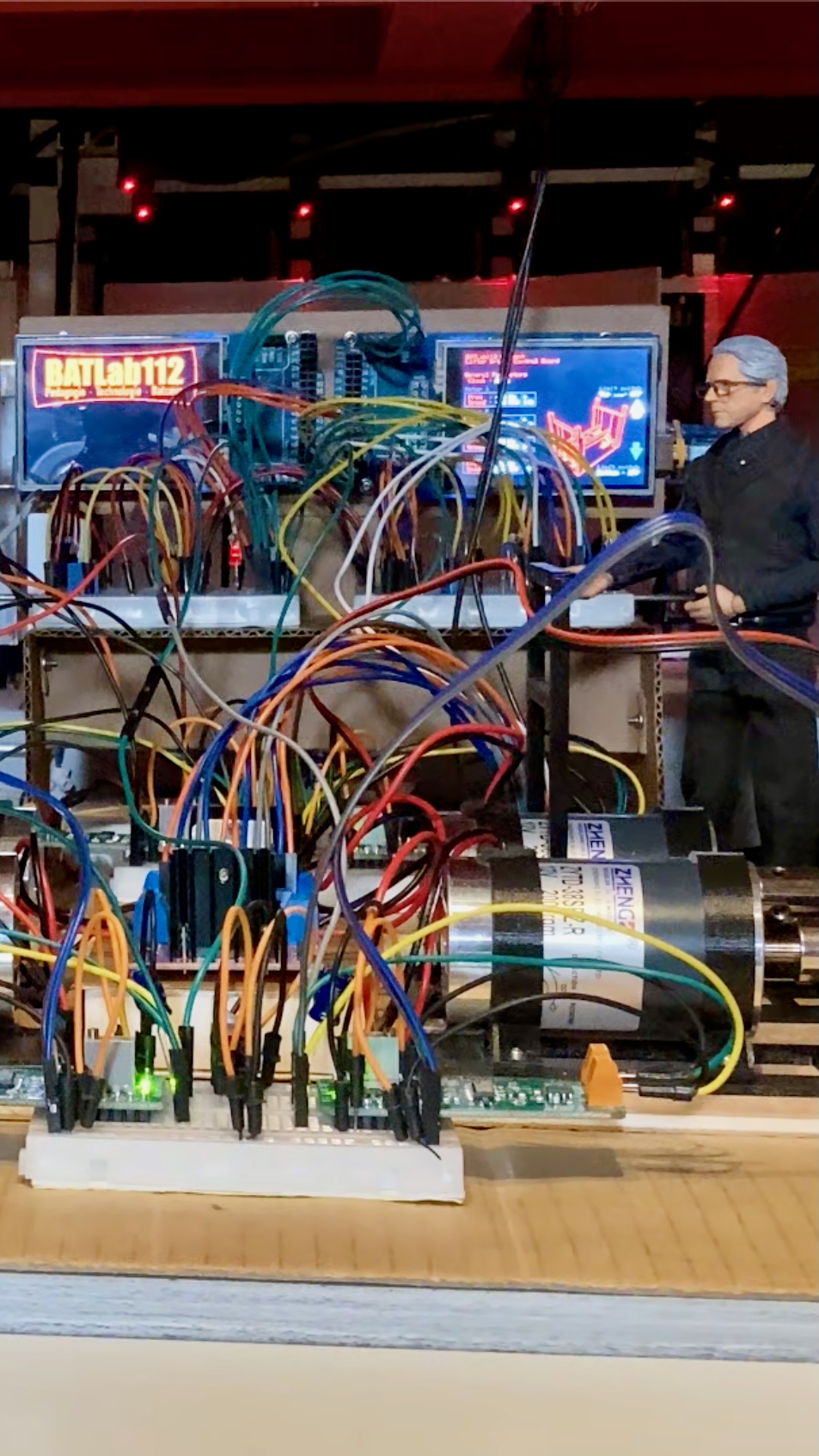
Fabrication d’une nouvelle partie du diorama de la Batcave : le laboratoire d’Alfred.
D’un point de vue pédagogique, ce laboratoire sera destiné aux présentations ludiques des évolutions en cours de développement du diorama avant leur intégration.
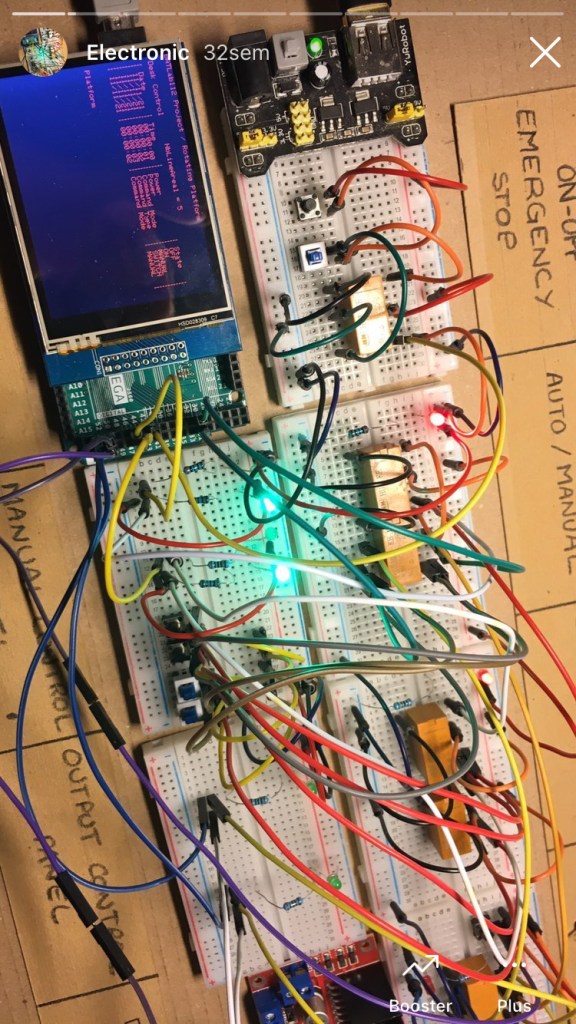
Après le test unitaire des commandes pour une plateforme moteur et le test électrique des 4 plateformes, la prochaine étape consiste à réaliser le câblage définitif.
Cet article présente la première partie de la conception détaillée, du pont élévateur à l’échelle 1/12, du diorama de la Batcave du projet BATLab112. Cette première partie porte plus particulièrement sur le design mécanique de la motorisation des axes du pont élévateur. La deuxième partie portera sur l’électronique de commande pour contrôler les moteurs.
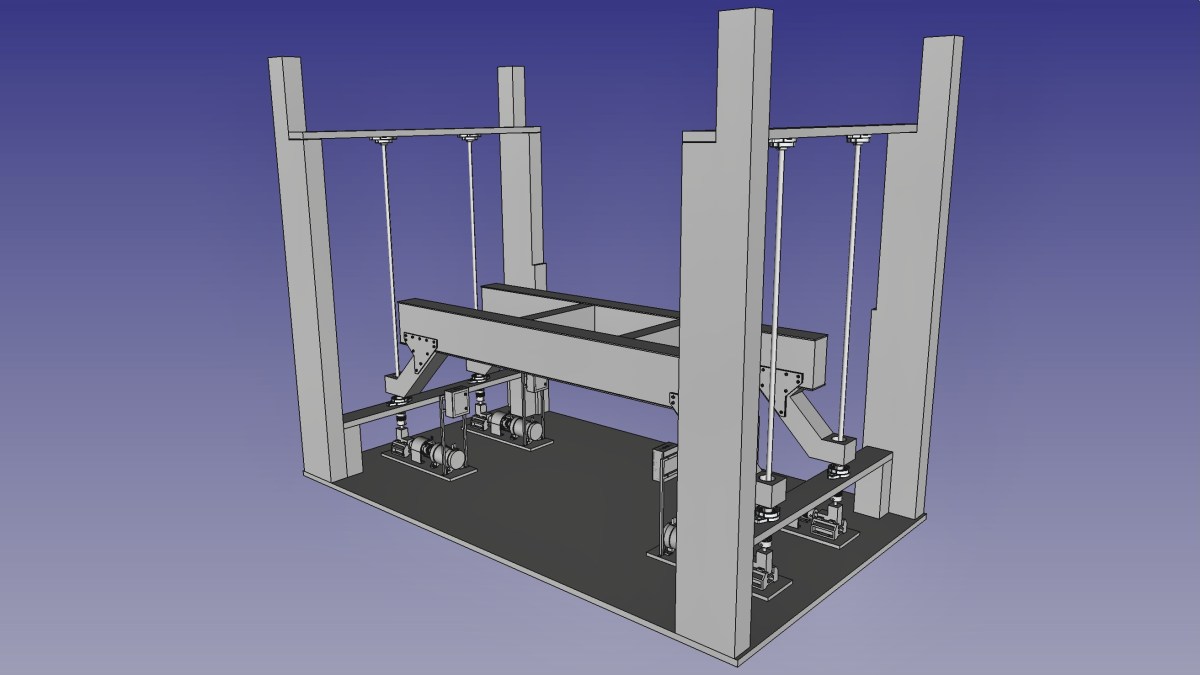
Le dimensionnement mécanique du pont élévateur lors de la conception préliminaire ainsi que le premier prototype réalisé, ont permis de valider la cinématique de ce système, et ainsi de développer et produire les prototypes des autres systèmes industriels équipant le diorama de la Batcave du projet BATLab112.
L’objectif de la conception détaillée est à présent de définir plus précisément la motorisation électrique du pont élévateur de la Batcave. En effet, lors de la conception préliminaire la motorisation du pont élévateur a été représentée par 4 moteurs pas à pas fixés directement sur les 4 axes. L’objectif était de pouvoir en définir la structure mécanique, cette partie du système a donc été mise de côté. À présent, il convient de proposer une solution technique fonctionnelle et compatible avec le niveau de réalisme d’un diorama pédagogique.
Présentation générale
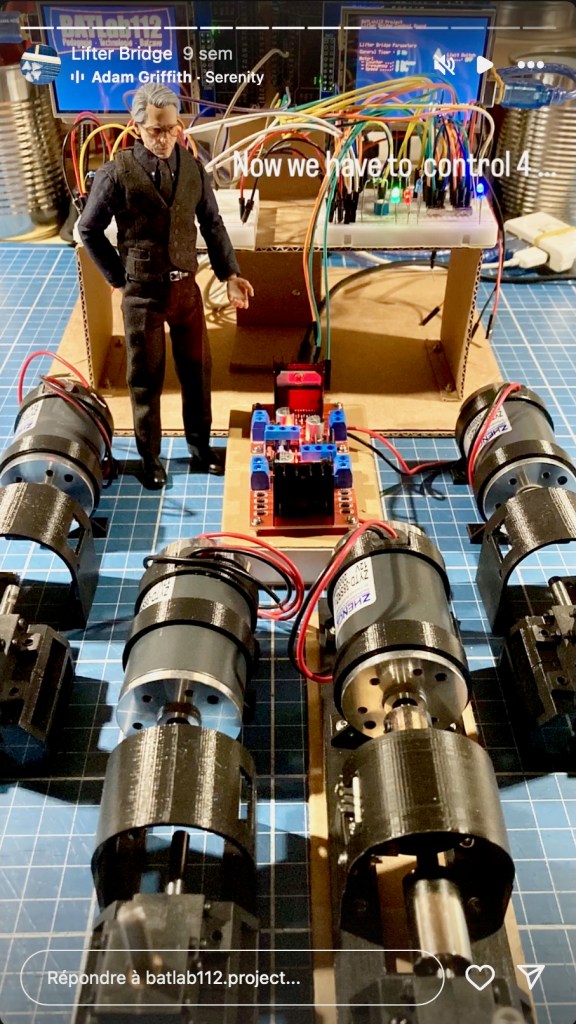
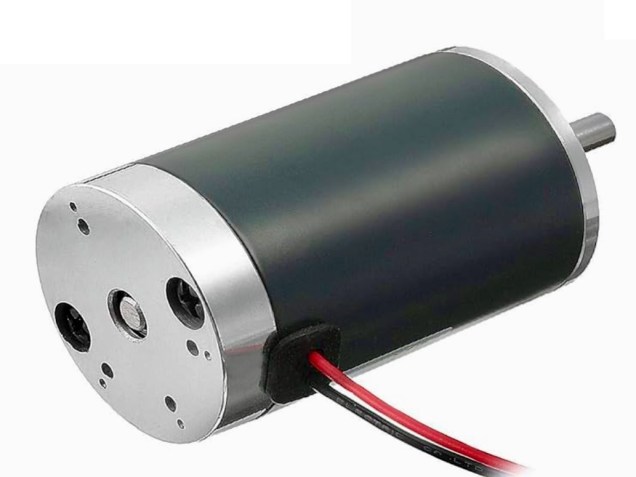
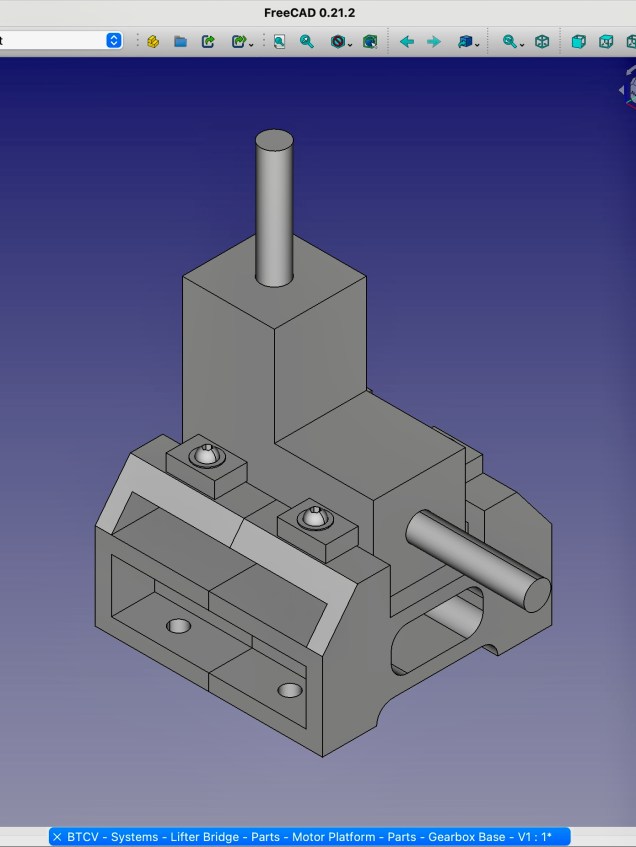
La nouvelle motorisation des axes du pont élévateur se compose de 4 plateformes identiques, équipées d’un moteur à courant continu couplé à une boîte de renvoi d’angle à 90°. Sur les 4 axes de couplage, une roue dentelée permet à un capteur optique de mesurer la vitesse de rotation du moteur et ainsi de contrôler la vitesse de déplacement vertical du pont élévateur.
Conception mécanique
Pour définir le design final de cet ensemble et s’assurer de son intégration mécanique dans le diorama, les composants sont sélectionnés dés la phase de conception détaillée en fonction de leurs dimensions et de leurs caractéristiques techniques.
Ce modèle de moteur est sélectionné pour ses dimensions mécaniques compatibles avec le rendu réaliste imposé par l’échelle 1/12 du diorama, mais aussi pour ses caractéristiques électriques garantissant le bon fonctionnement final du système. La tension d’alimentation en 12V, associée à une vitesse de rotation nominale élevée, laissent envisager un couple mécanique satisfaisant après réduction de la vitesse de rotation.
Roue codeuse et capteur optique
Ce capteur est sélectionné pour la simplicité de sa mise en œuvre, son encombrement compatible avec l’échelle du diorama et un signal de sortie numérique. Comme le montre la photo, ce modèle est souvent vendu par petit lot de pièces.
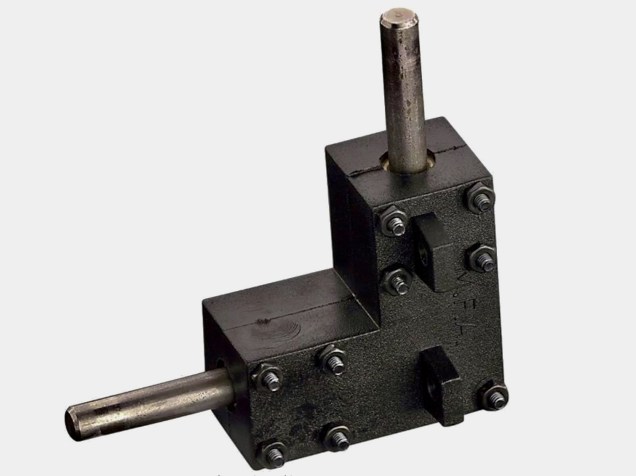
Engrenage angulaire
Le choix de ce type d’engrenage est relativement restreint sur un marché grand public autorisant des commandes à l’unité. Ce modèle d’engrenage angulaire est sélectionné pour son rapport de réduction de 1:1 mais aussi pour son design mécanique robuste, équipé de pattes de fixation.
Conception électrique
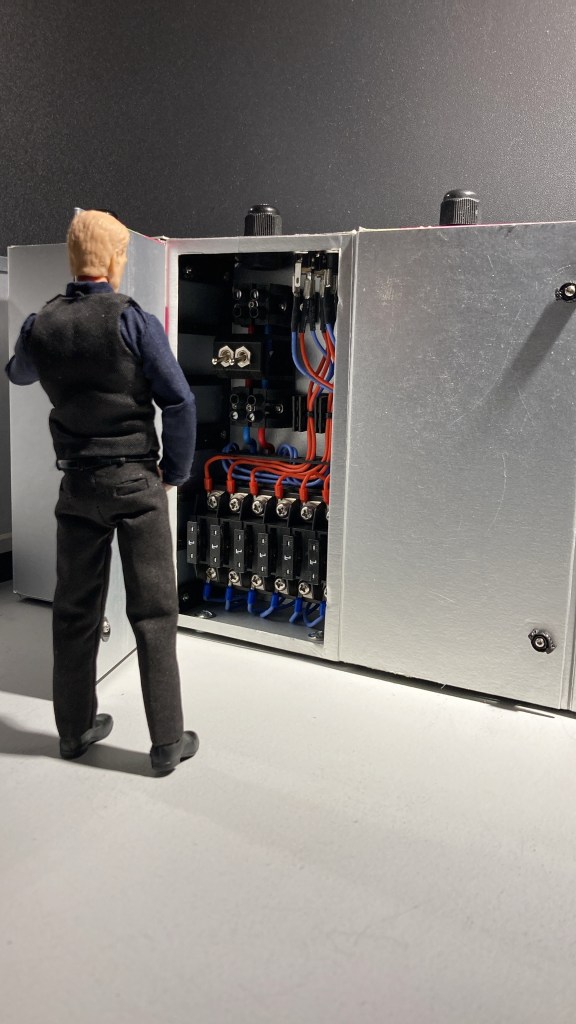
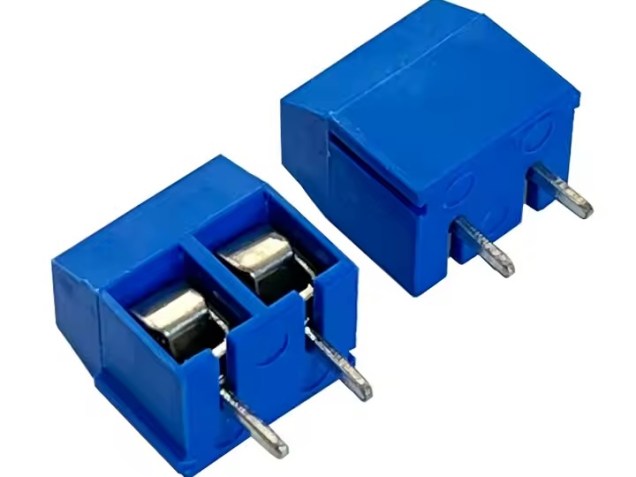
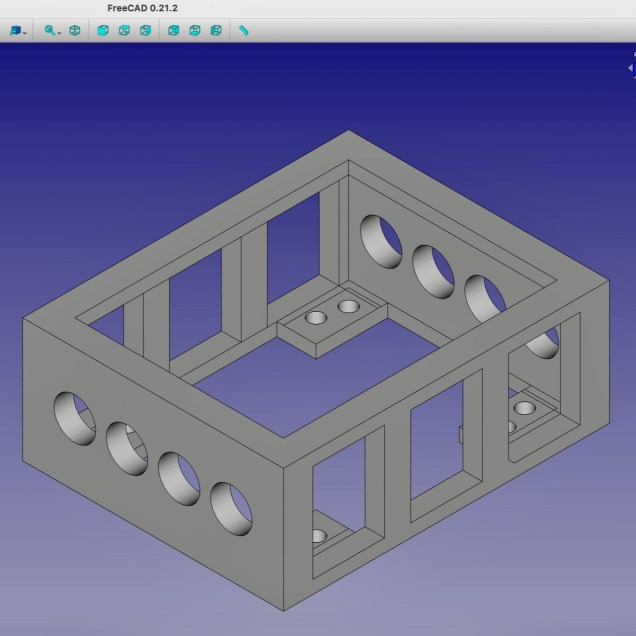
La conception électrique porte ici essentiellement sur l’armoire électrique qui doit assurer le raccordement de la tension d’alimentation des moteurs ainsi que l’alimentation électrique et le signal de sortie de la roue codeuse.
L’objectif de reproduction réaliste du câblage d’une telle armoire n’est pas envisageable compte tenu des contraintes d’intégration des composants nécessaires. Cependant, les armoires électriques du pont élévateur vont faire l’objet d’une évolution dans leur design, par rapport à la conception des précédentes armoires électriques du diorama du projet BATLab112. L’objectif est de remplacer le bloc de jonction de raccordement de la tension d’alimentation des moteur, par un système à base de switcher de connecteur, faisant office de sectionneur électrique. La roue codeuse sera raccordée quant à elle via un autre connecteur faisant office de bornier électrique.
Cet article intervient après un changement d’environnement technique autorisé par le changement d’ordinateur. A présent la version 0.21.2 de FreeCAD est utilisée pour une meilleure définition de la conception du projet BATLab112.
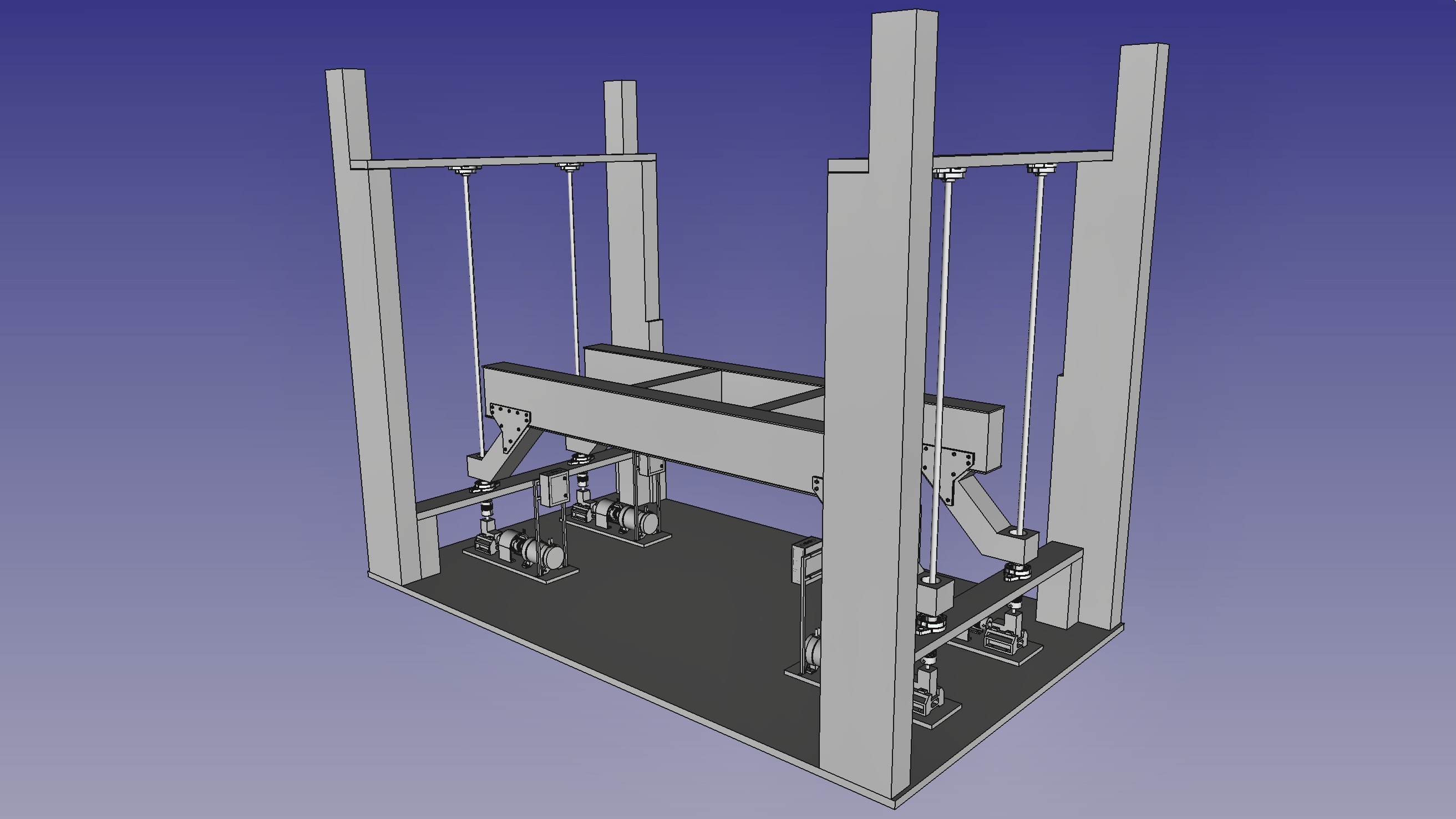
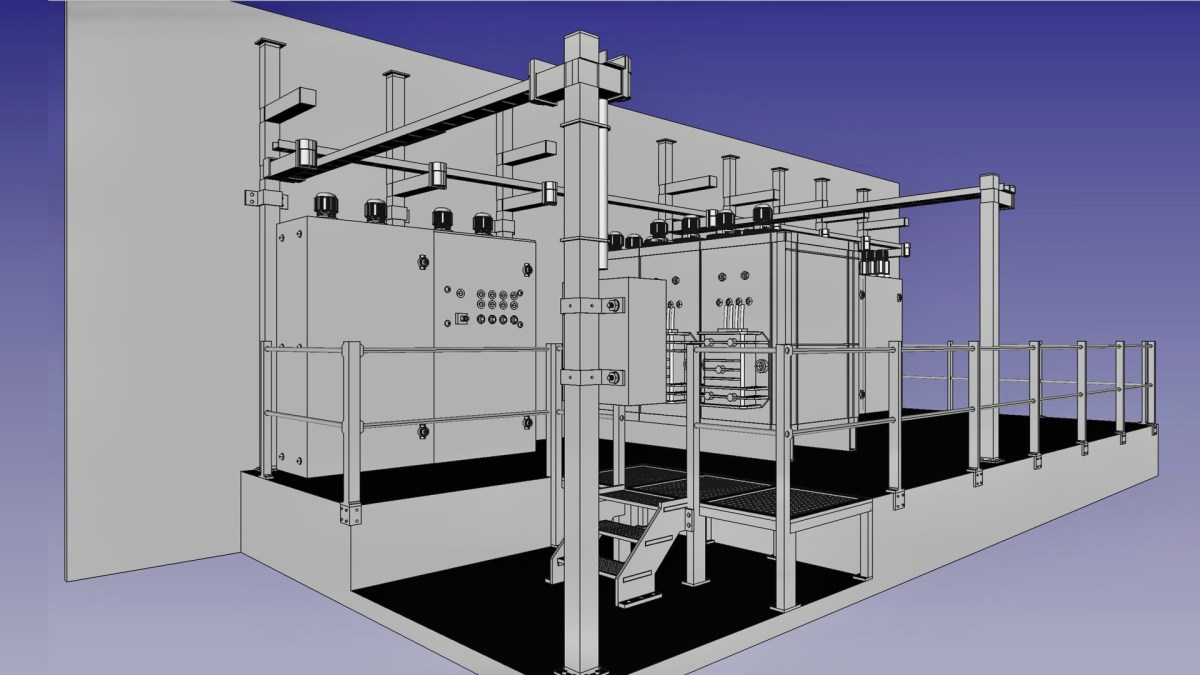
La modélisation du poste électrique équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Contrairement à d’autres composants utilisés dans les systèmes industriels de la Batcave, aucun modèle 3D n’est disponible librement pour chacun de ces composants. Par conséquent, leur modélisation 3D via FreeCAD s’attache essentiellement à leurs designs généraux pour en définir les dimensions externes.
Modélisation des composant électronique
Les modèles 3D des composants électroniques sont disponibles dans la bibliothèque de GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
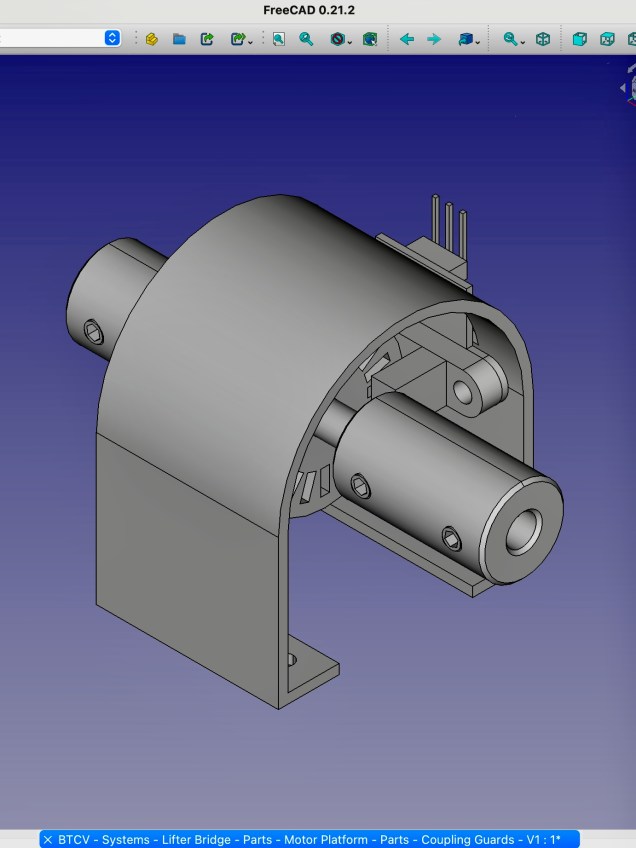
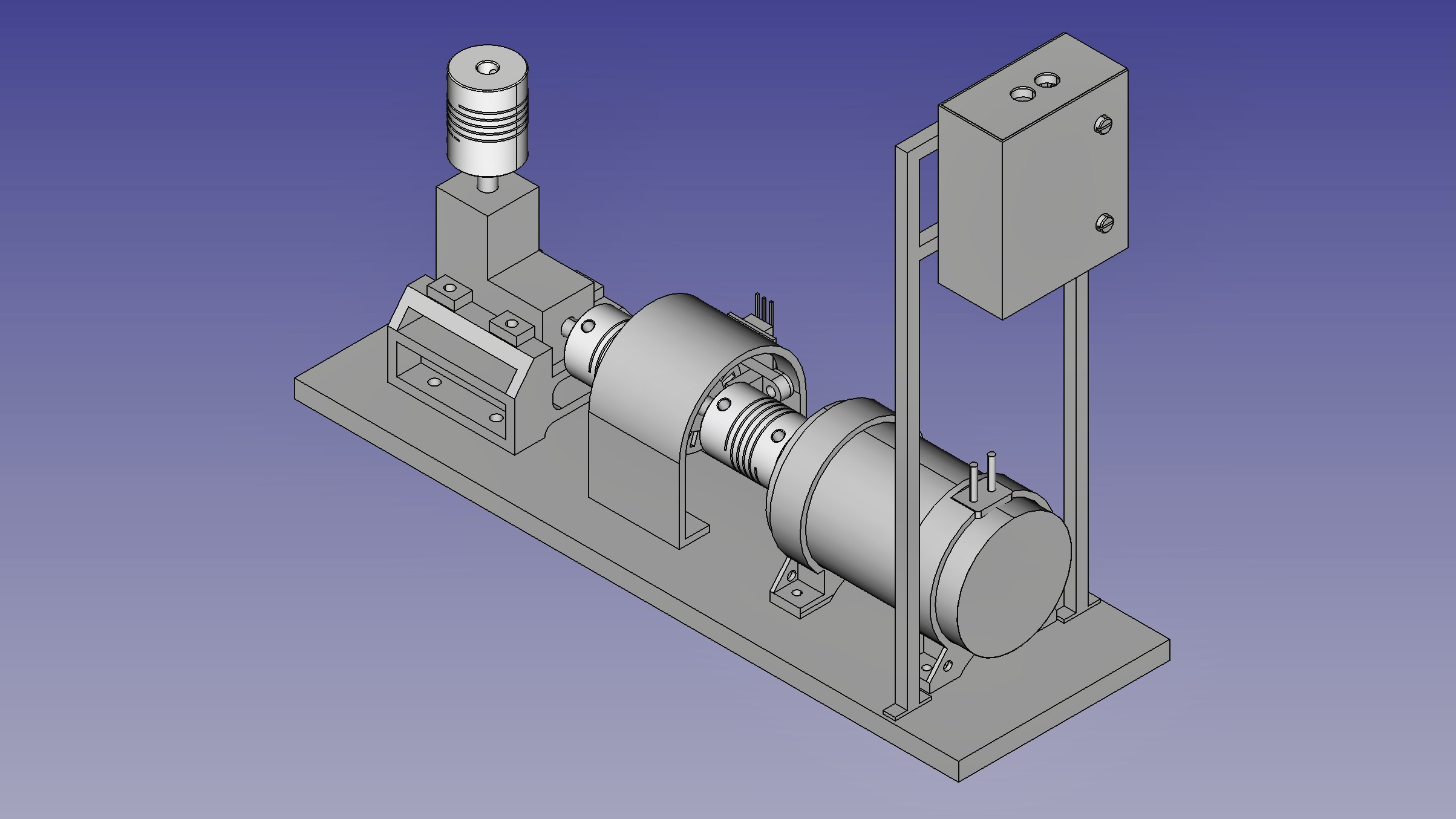
Design d’une plateforme de motorisation d’un axe vertical du pont élévateur
Pour modéliser une plateforme complète, des éléments complémentaires sont ajoutés comme les coupleurs d’axes et le portique de l’armoire électrique assurant la centralisation des raccordements électriques.
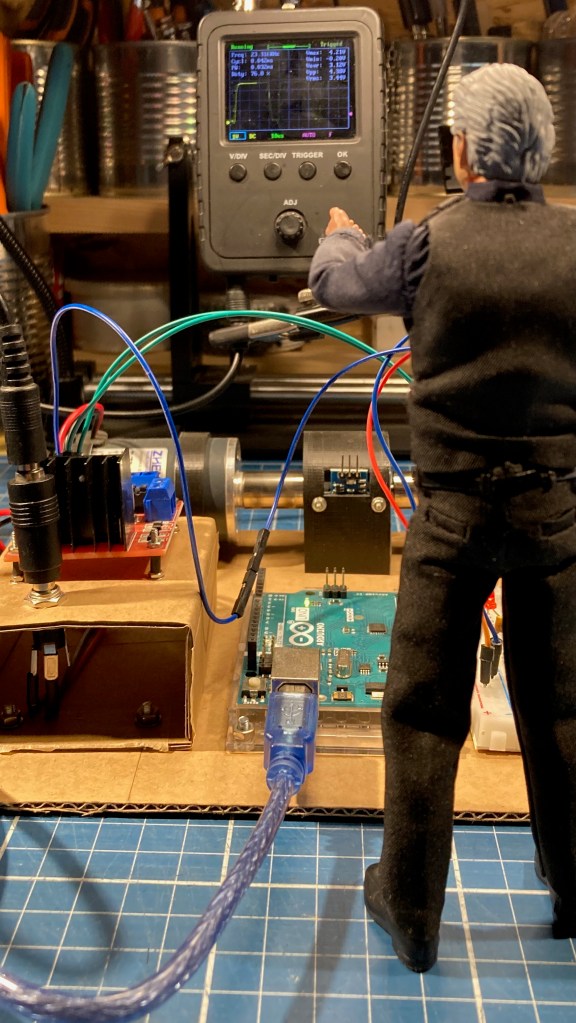
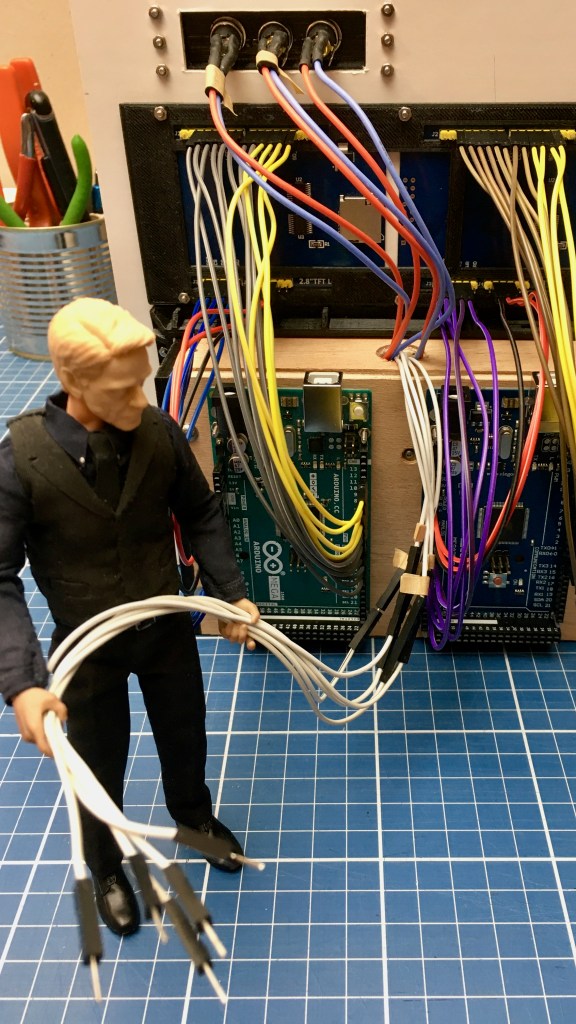
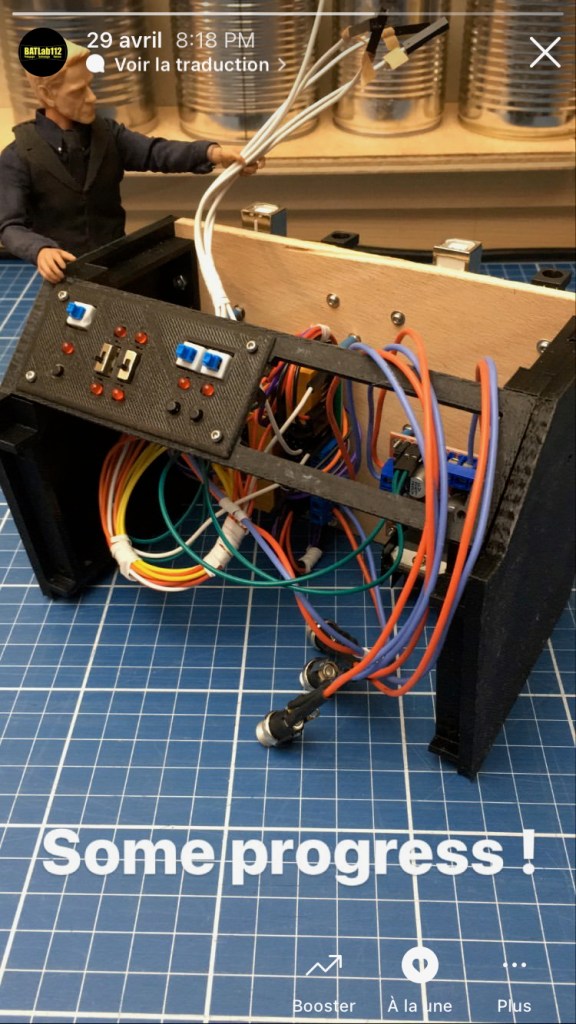
Test du prototypage du câblage des commandes manuelles et de l’affichage de la vitesse de rotation d’un des quatre moteurs d’entraînement du pont élévateur .
Dans un article précédent, j’ai souligné l’intérêt, en phase de conception 3D, d’utiliser la rotation dynamique de FreeCAD pour obtenir une visualisation globale d’un modèle. Cette fonctionnalité, bien que pertinente pour apprécier l’architecture générale d’un objet, demeure toutefois insuffisante dès lors qu’il s’agit d’observer des déplacements relatifs entre plusieurs entités modélisées.
Il ne s’agit pas ici de simuler le fonctionnement d’un mécanisme articulé complexe — tel qu’un ensemble piston-bielle-vilebrequin ou un système de soupapes — pour lesquels des extensions spécialisées existent. L’enjeu porte plutôt sur l’animation coordonnée d’objets mécaniquement indépendants, mais dont les mouvements respectifs doivent être synchronisés ou, à tout le moins, ordonnés. À cet égard, les macros développées sous FreeCAD constituent un outil méthodologique particulièrement efficace.
Dans le cadre du projet BATLab112, la mise en mouvement virtuelle des quatre systèmes industriels modélisés répond à trois objectifs. Premièrement, la simulation permet de vérifier la compatibilité spatiale de leurs trajectoires dans l’environnement confiné de la Batcave. Deuxièmement, elle facilite la synchronisation de leurs déplacements afin d’optimiser le processus global de prise en charge de la Batmobile. Troisièmement, elle offre un support de médiation technique destiné à présenter de manière claire et dynamique le fonctionnement général du diorama pédagogique.
La vidéo illustre ce dispositif. Réalisée au moyen d’une macro Python sous FreeCAD, elle met en scène le parcours complet de la Batmobile à travers l’atelier robotisé, en contrôlant précisément le mouvement des différents systèmes industriels.
Enfin, un dernier élément mérite d’être souligné : l’usage de la fonction Enregistrer une macro. Celle-ci constitue un atout majeur pour la génération rapide de segments de code correspondant aux actions effectuées dans l’interface. Ces fragments peuvent ensuite être intégrés et structurés au sein d’un programme plus général, facilitant ainsi le prototypage et l’industrialisation des animations cinématiques.