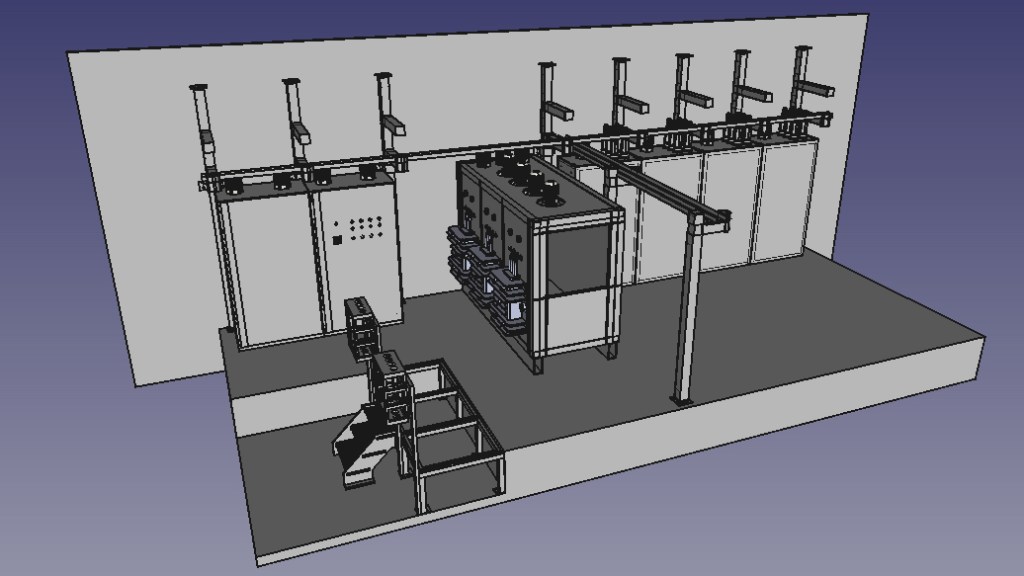
Cet article présente la deuxième version de la conception détaillée, du local électrique à l’échelle 1/12, du diorama de la Batcave du projet BATLab112. Cette mise à jour de cette conception est en lien avec la réalisation du premier modèle opérationnel du local technique.
Cet article fait suite à l’article précédent sur la conception détaillée du local technique et ceux de la fabrication des différents éléments du modèle opérationnel.
Structure Cantilever de support des chemin de câble
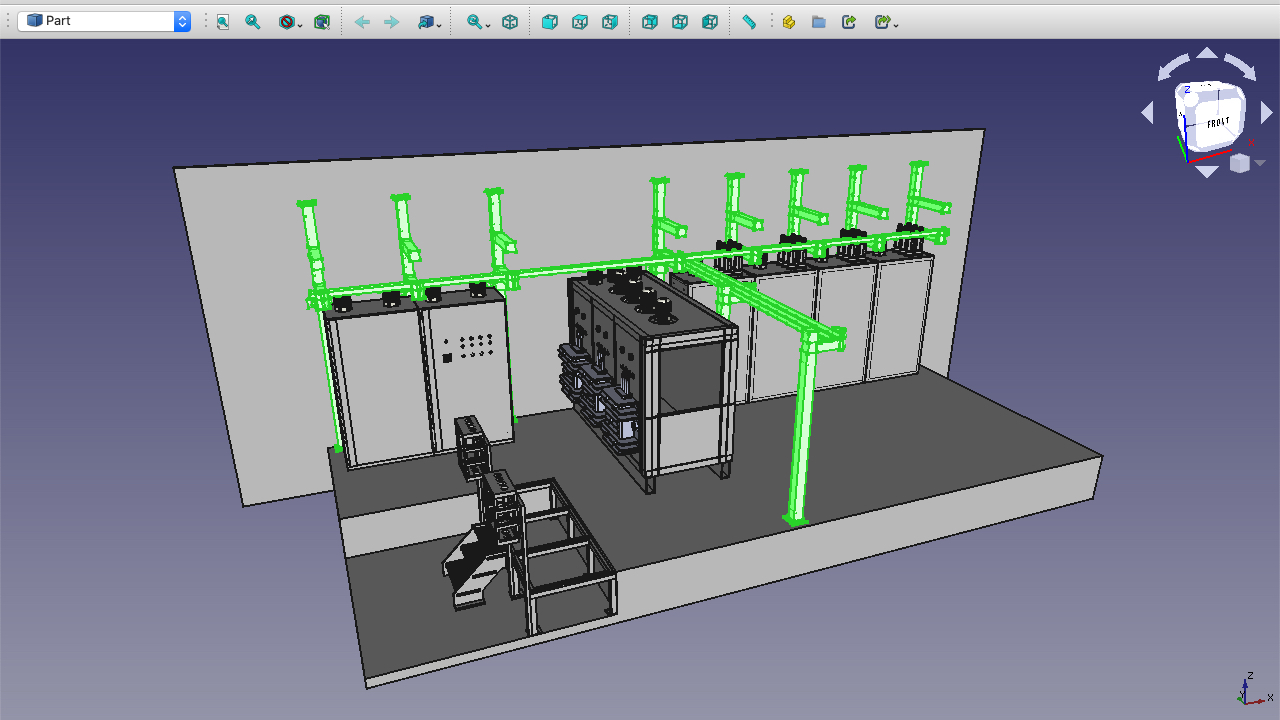
Passerrelle d’accès au local électrique
Les modifications par rapport à la précédente version de la conception détaillée :
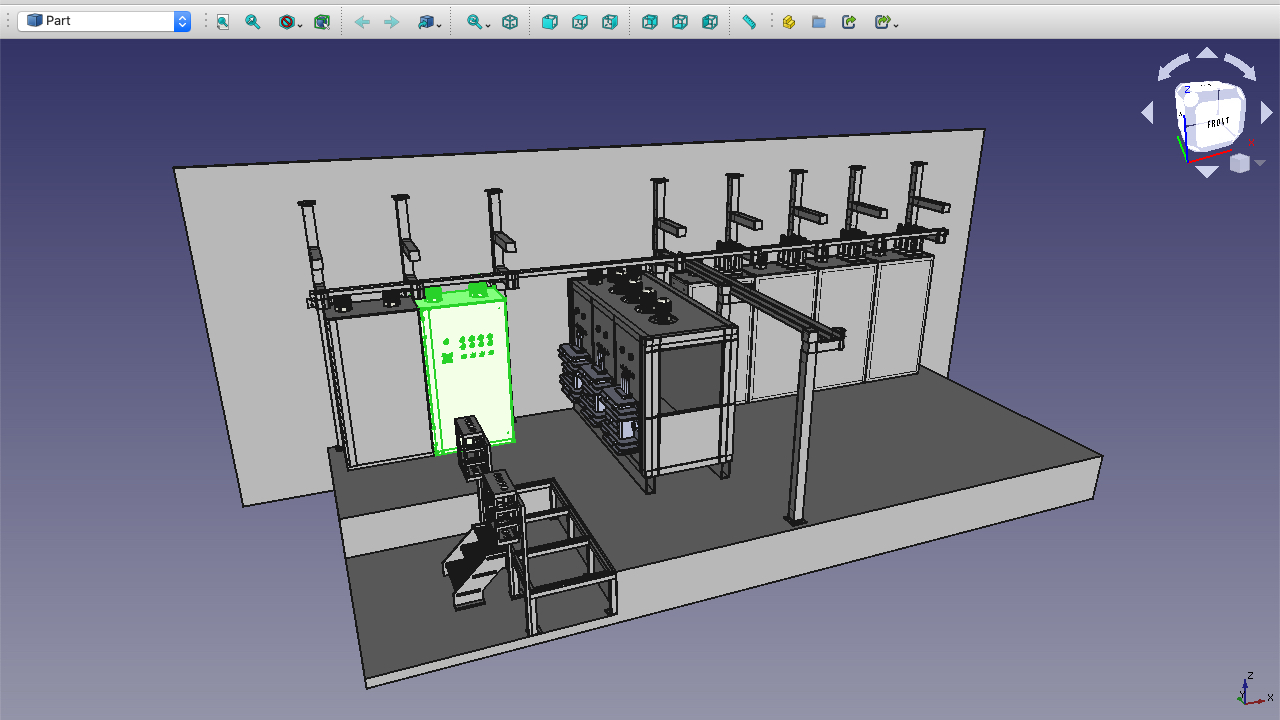
Une quatrième armoire de distribution
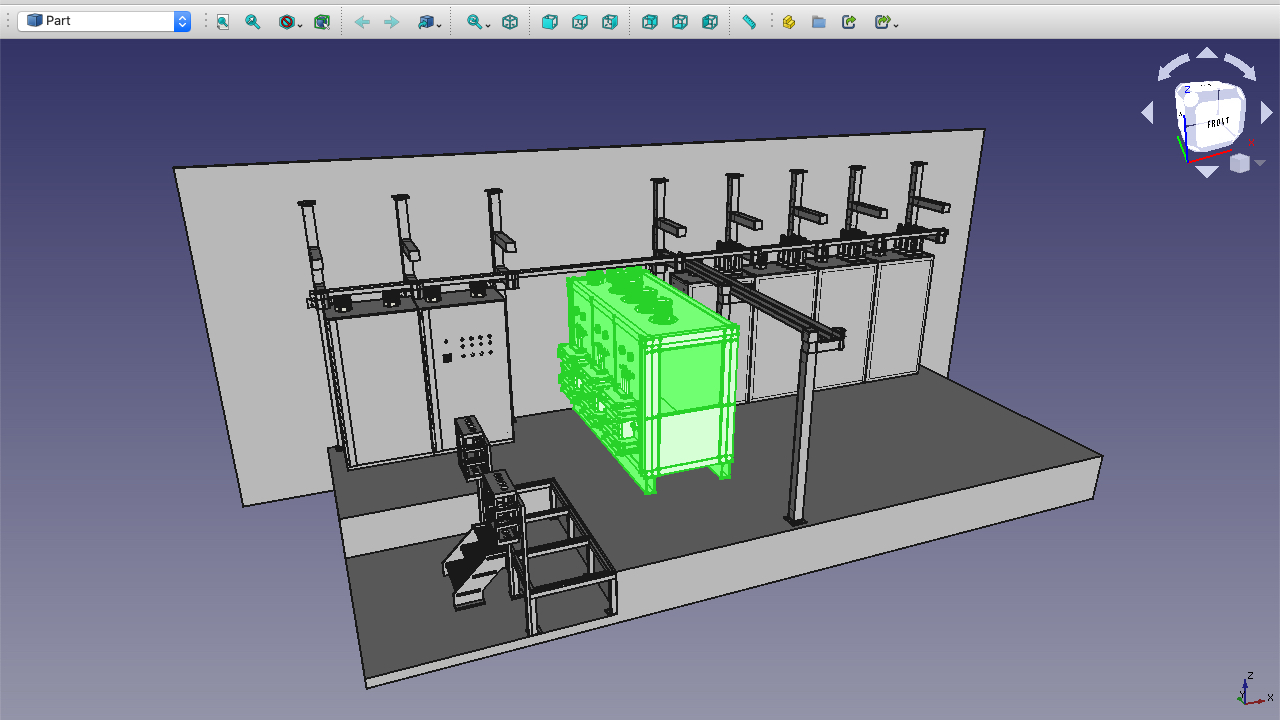
La structure Cantilever de support des chemin de câbles
Un premier design de la passerelle d’accès au local électrique
Une quatrième armoire de distribution
Cette quatrième armoire de distribution, identique dans sa conception au 3 premières est une armoire supplémentaire pour assurer la distribution des tensions 12VDC.
Armoires de distribution
La structure cantilever
Cette structure est conçue comme support au chemin de câble. Le détail de sa conception fera l’objet d’un prochain article en cours de rédaction.
Structure Cantilever de support des chemin de câble
La passerelle d’accès
La conception de cette passerelle n’est pas encore totalement aboutie lorsque cet article sera mis en ligne. Un article dédié est en cours de rédaction.
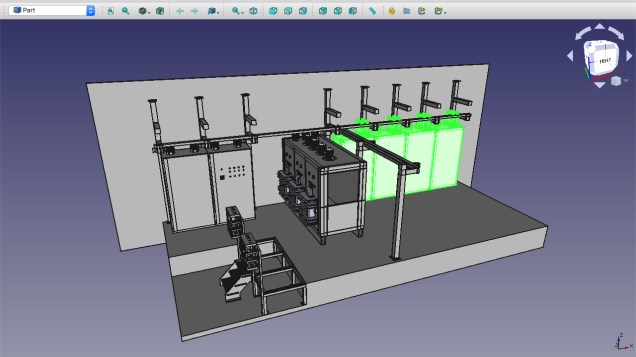
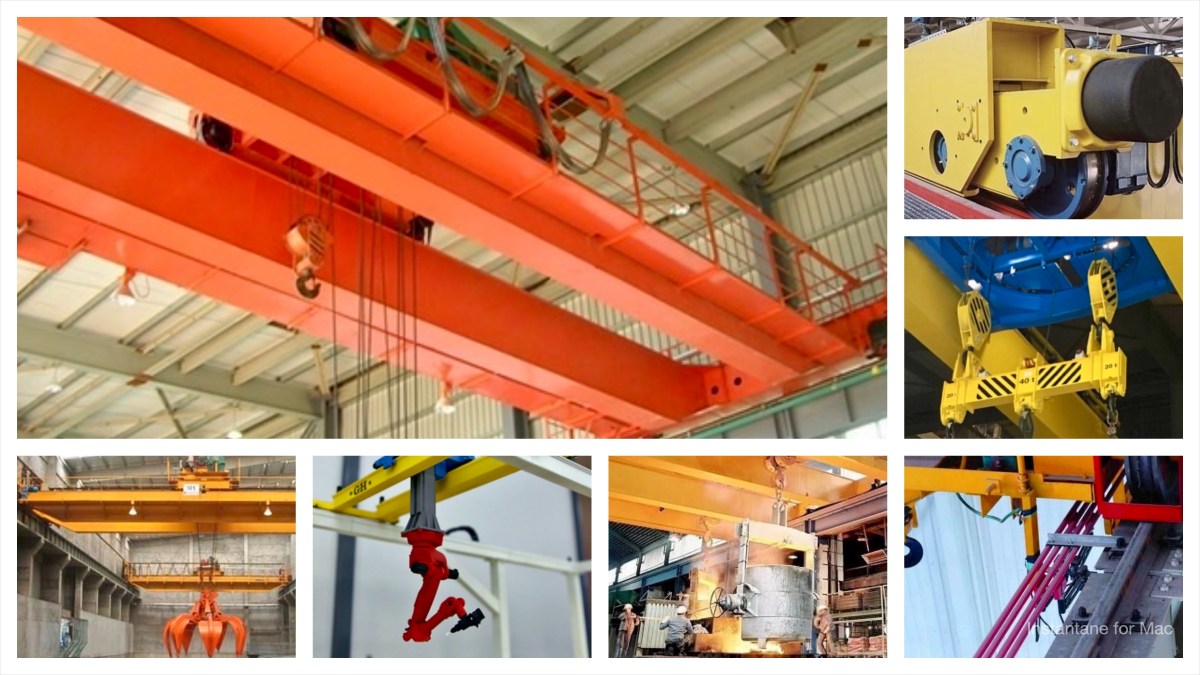
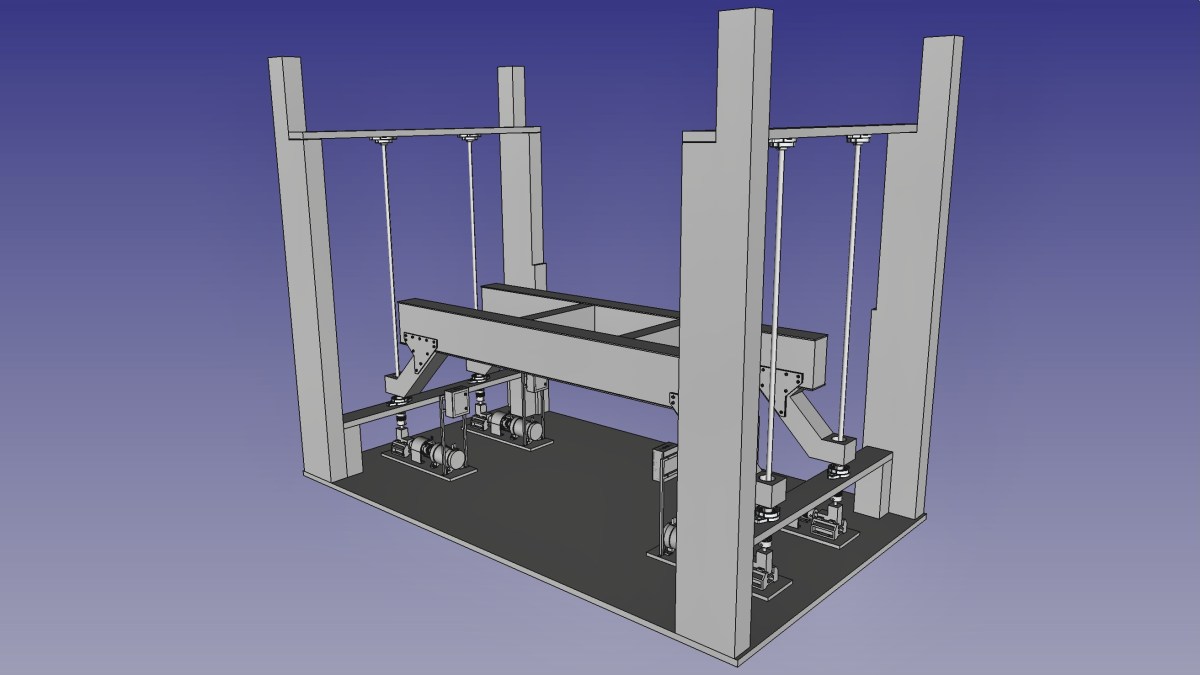
Cet article de présentation de la structure mécanique du pont roulant bipoutre fait suite à un article de présentation de la conception préliminaire de cet équipement.
Si ce prototype permet de valider le design de la structure du quadrilatère du pont roulant, il reste à présent à définir plus précisément le design des rails de roulement du pont ainsi que le système de festons de câbles électriques.
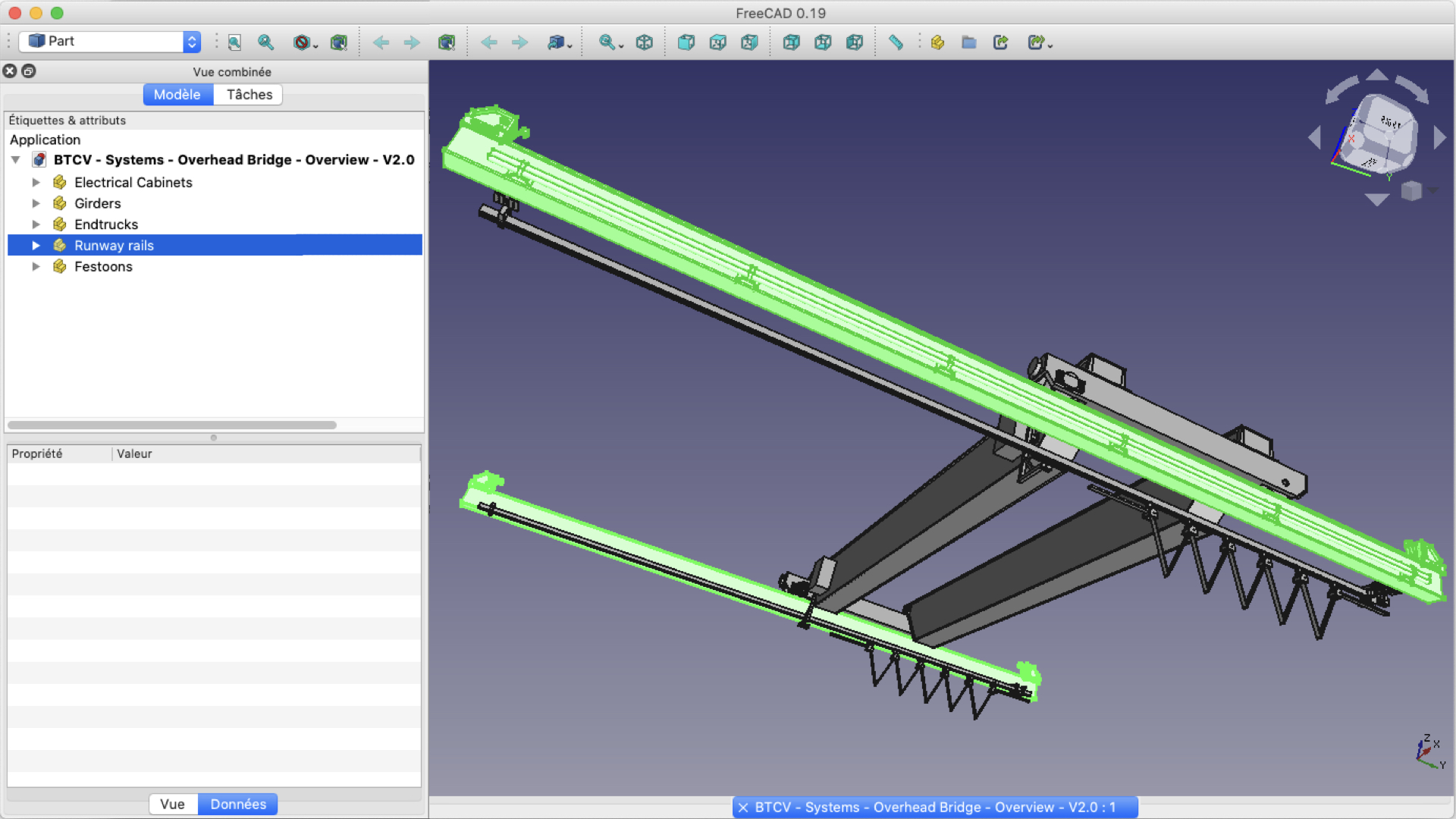
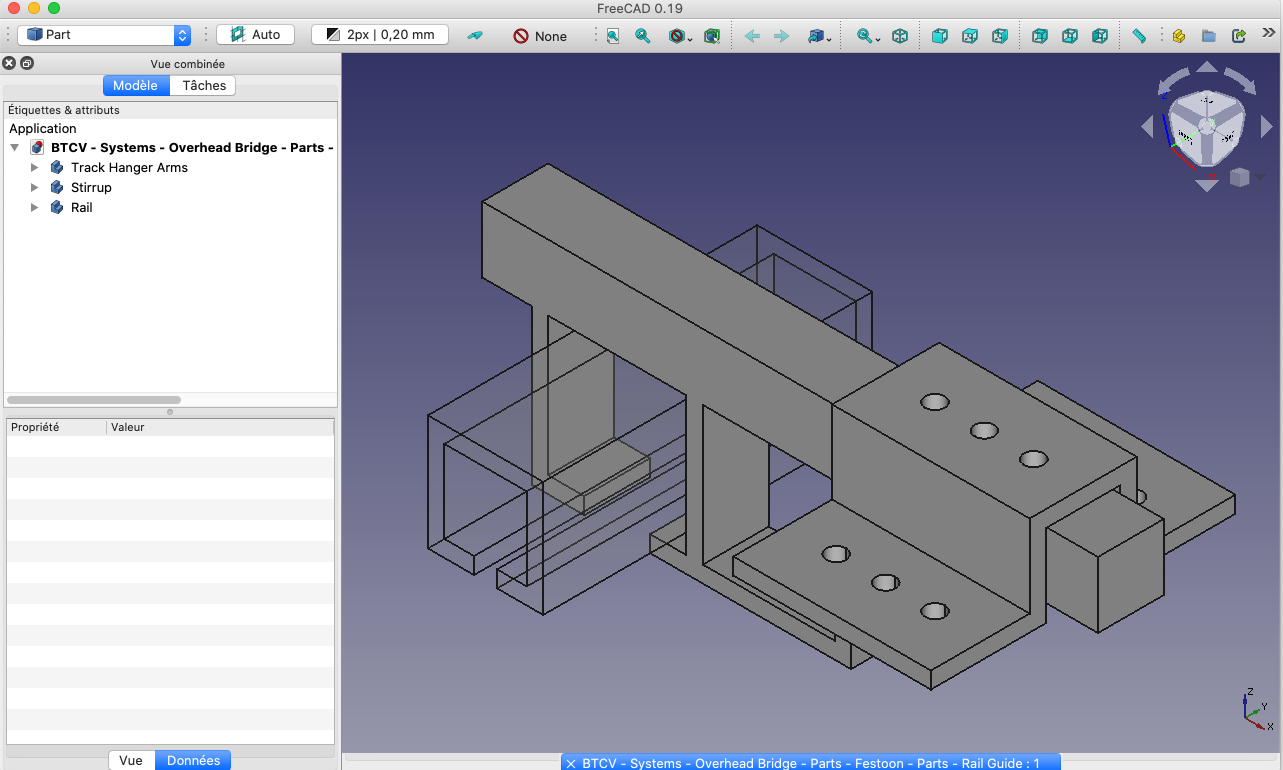
Vue générale du pont roulant
Screenshot n°1 : Armoires de raccordement électrique des moteurs
Screenshot n°2 : Festons de câbles électriques
Screenshot n°3 : Rails de guidage et butées de fin course
Screenshot n°4 : Sommiers du pont roulant
Screenshot n°5 : Poutres du pont roulant
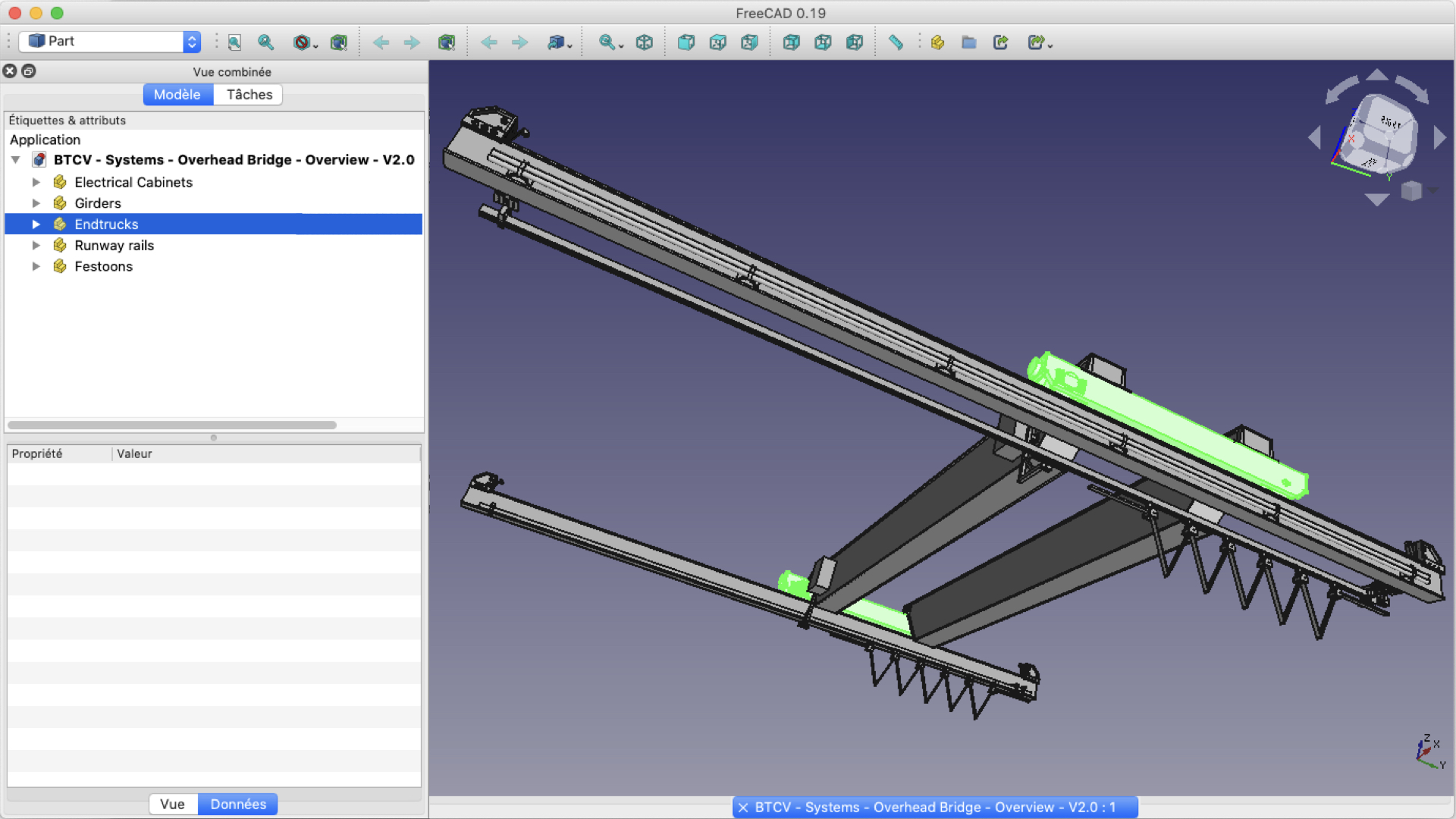
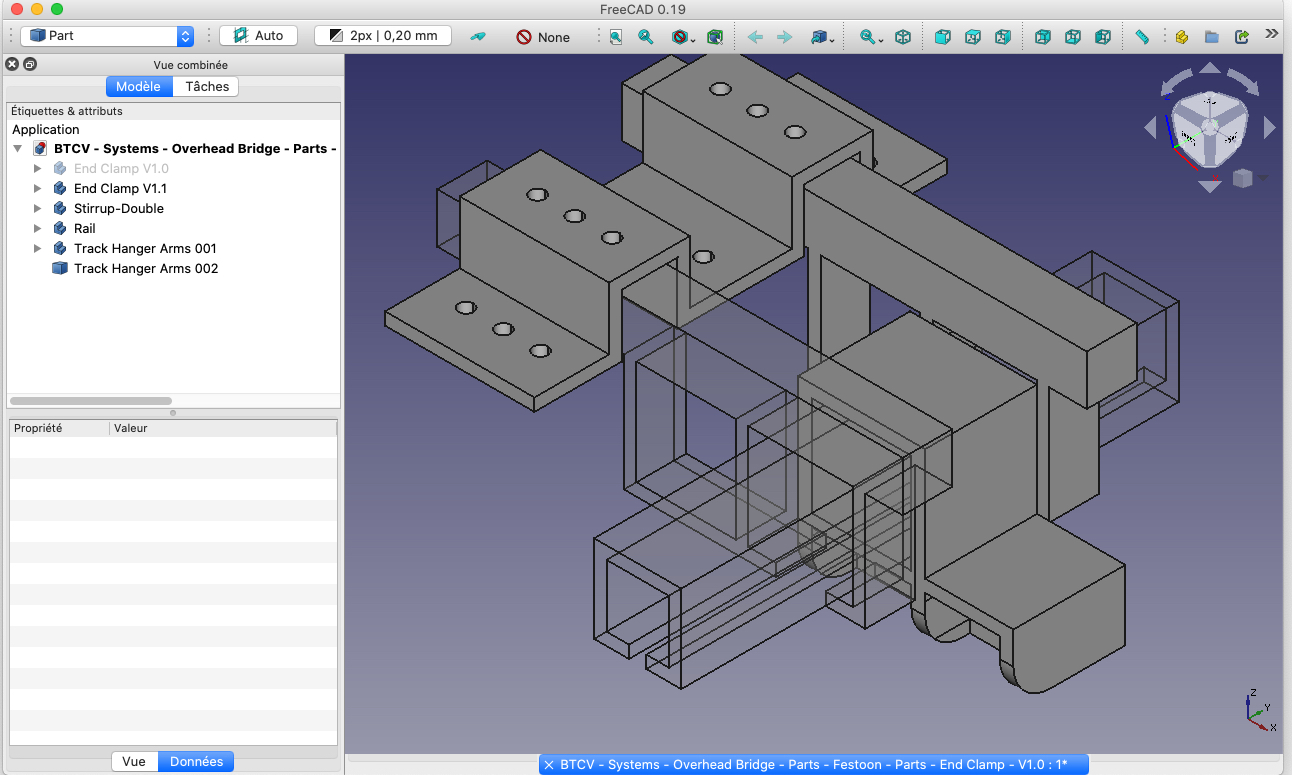
Festons de câble
Vues générales
Cette vue en perspective axonométrique plongeante montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Cette vue en perspective axonométrique en contre plongée montre le design d’un rail équipé de son feston de câble (Trolleys + Câble).
Vues de détails
Bras de suspension des rails des festons des câbles
Les rails de guidage des festons de câble sont suspendus par des bras. Ces bras sont composés de deux parties : Le bras de suspension du rail et l’étrier de maintien du bras. Le design de ces deux pièces est conçu pour une réalisation par impression 3D. La fixation des étriers sur la structure du diorama est réalisée par des clous à tête suivant l’implantation des rangées de trou. Le nombre d’ensembles bras et étrier reste à définir en fonction des contraintes lors de la fabrication du modèle opérationnel.
Bras de suspension terminaux des festons de câbles
Pour guider le câble vers son point de raccordement électrique et éviter toute tension due au déplacement du pont, deux bras de suspension du rail de guidage sont fixés par un étrier double. Un guide de câble est alors positionné sur le rail entre les deux bras. En passant dans ce guide, le câble est alors dirigé vers son point de raccordement, tout en étant maintenu en position face à la tension exercée sur le câble lors du déplacement du pont roulant.
Trolleys de roulement des festons
Pour garantir le guidage du câble le long de son rail, des trolleys sont utilisés pour supporter le câble et assurer son guidage grâce à 2 séries de 2 rouleaux enserrant la partie inférieure du rail de guidage. Le design de ces pièces est conçu pour une réalisation par impression 3D.
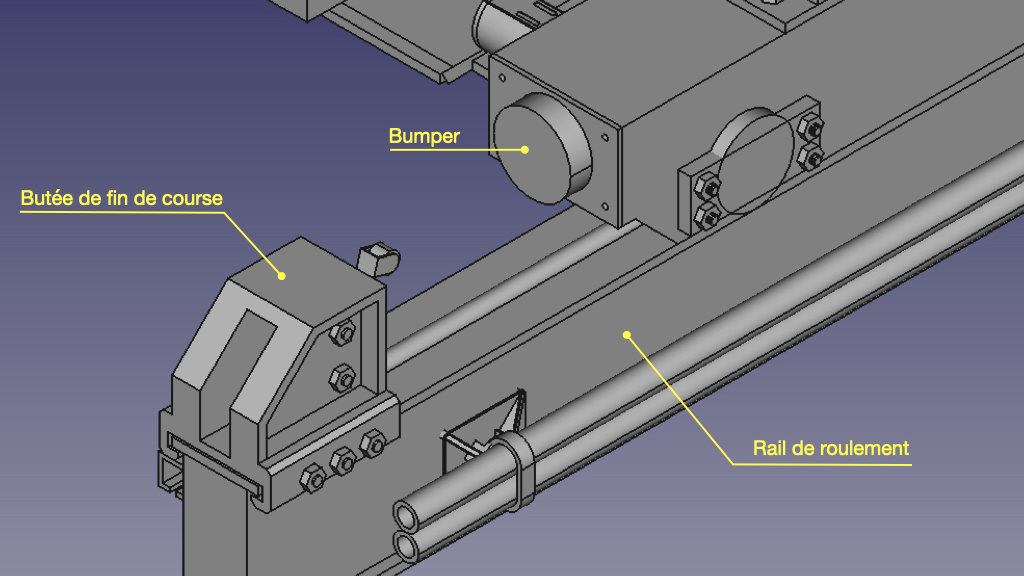
Butées de fin de course
Vues générales
Les butées de fin de course sont placées à l’extrémité des rails de roulement d’un pont roulant. Ces dispositifs constituent une limite physique dans le déplacement du pont roulant, servant de sécurités en empêchant le pont roulant de sortir de ses rails, chuter et faire chuter la charge qu’il transporte.
Les bumpers sont des tampons d’amortissement du choc du contact du pont roulant avec les butées de fin de course. Ils sont installés aux extrémités des deux sommiers du pont roulant (éléments moteur du pont roulant).
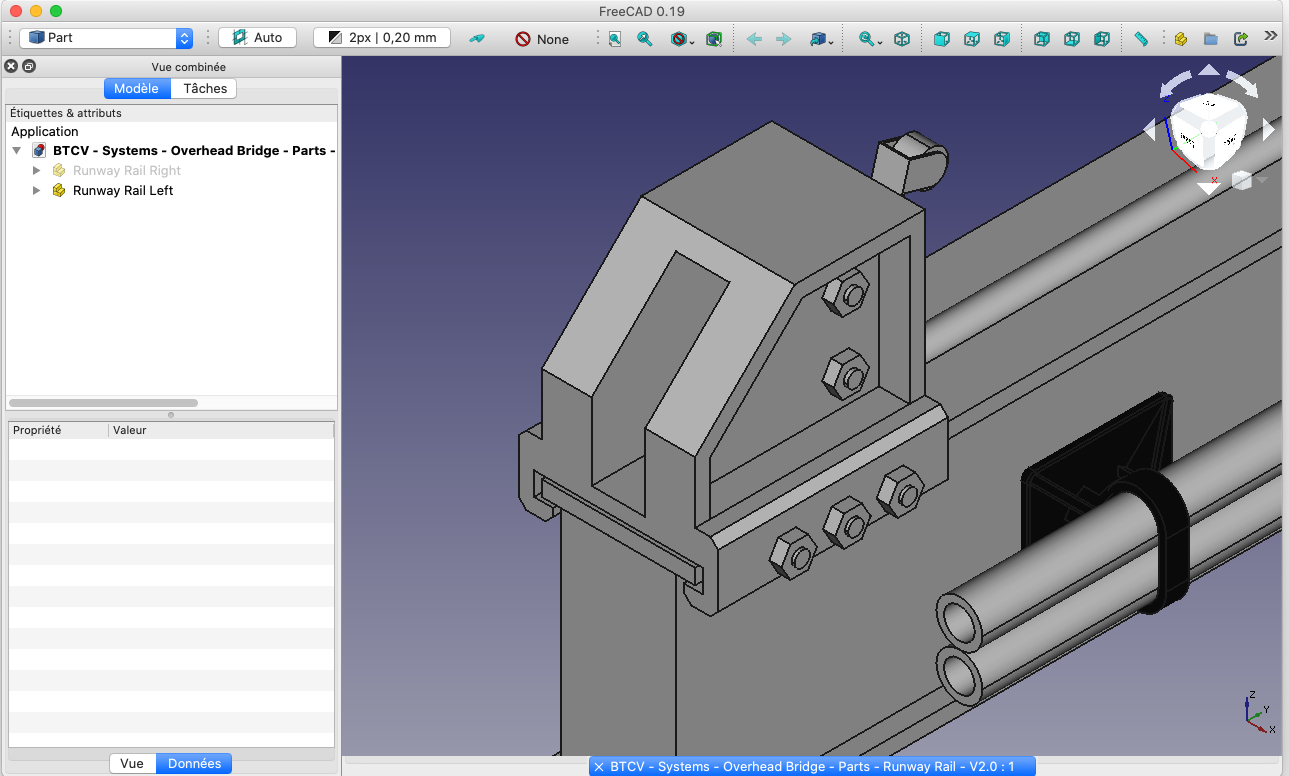
Vues de détails
Chacune des quatre butées de fin de course est équipée d’un capteur coupe circuit. Si le pont roulant vient jusqu’au contact d’une butée, il actionne alors son capteur qui coupe l’alimentation électrique des moteurs, entrainant l’arrêt du pont. Le design du corps de ces butées est conçu pour être réaliser par impression 3D. La fixation des butées sur la rail de roulement du pont est réaliser par 6 boulons M2. Le capteur électrique est inséré dans le corps de la butée, maintenu en position par 2 boulons M2.
Bumpers
Le design des bumpers est conçu pour être réaliser par impression 3D. Ils sont fixés sur les extrémités des sommiers par 2 rangées de 3 clous à tête.
Modélisation 3D
FreeCad
La modélisation du pont roulant bipoutre équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.19.
Les fichiers des modèles 3D utilisés lors de la conception préliminaire pont roulant bipoutre équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Le design de toutes ces pièces ont été conçus pour être réaliser par impression 3D.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
L’article présente la fabrication d’un prototype d’armoire de distribution électrique basse tension pour le diorama du projet BATLab112, conçu pour distribuer les tensions 5 VDC, 6 VDC et 12 VDC vers les consoles de commande. Il expose les retours d’expérience des prototypes antérieurs, l’impression 3D de la structure interne et la modification du design pour résoudre les échecs…
À l’issue de la phase de conception détaillée du modèle d’armoire de distribution électrique du diorama, l’objectif consiste désormais à réaliser un premier prototype fonctionnel. Cette étape vise à valider les choix techniques retenus avant la fabrication des quatre modèles opérationnels destinés à assurer la distribution des tensions 5 VDC, 6 VDC et 12 VDC vers les quatre consoles de commande des équipements industriels intégrés au diorama.
Retour d’expérience sur les armoires de raccordement électrique
Le retour d’expérience issu des prototypes antérieurs des armoires de raccordement du poste HT/BT a mis en évidence que l’absence de structure interne ne permet pas d’assurer une rigidité mécanique satisfaisante. Bien que l’enveloppe de ces armoires, réalisée à partir d’emballages de produits alimentaires, puisse apparaître suffisamment rigide lors de la phase de fabrication, cette rigidité s’avère insuffisante lors des phases de manipulation et d’exploitation. En conséquence, l’enjeu principal de la réalisation de ce prototype réside dans la validation de la faisabilité technique d’une structure interne réalisée par impression 3D.
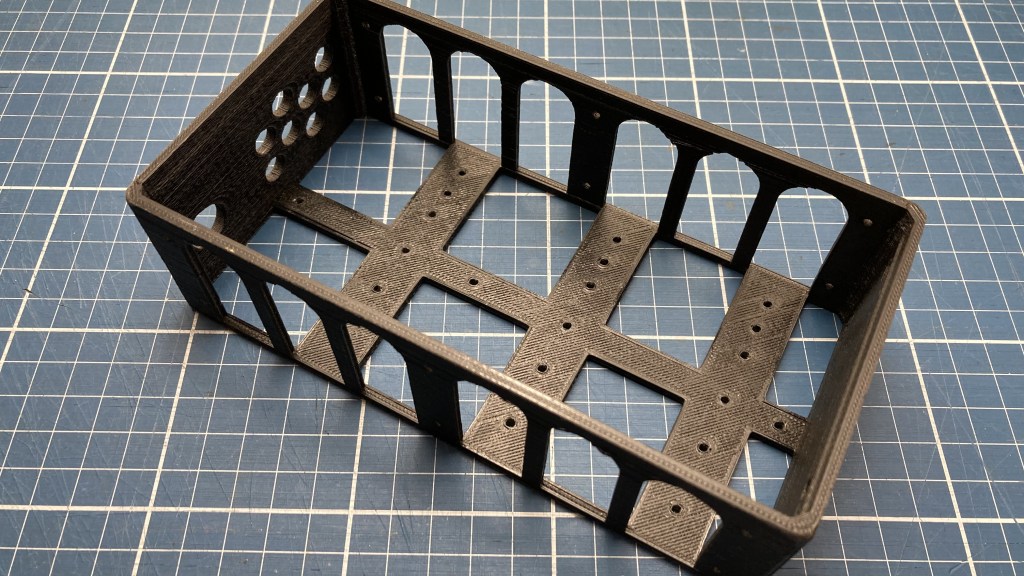
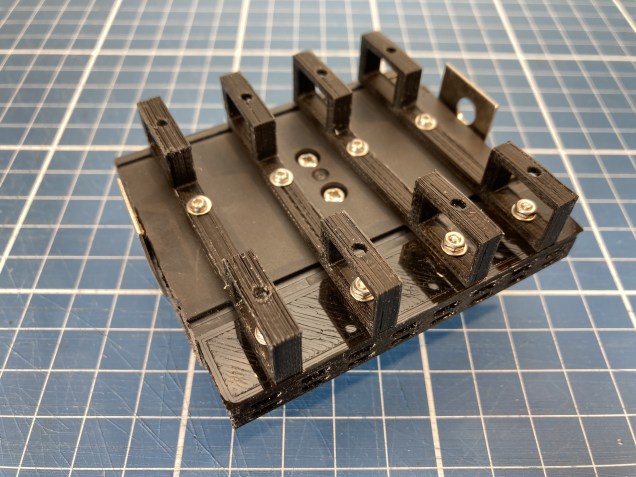
Impression 3D de la structure interne d’une armoire électrique du diorama
Fabrication par impression 3D de la structure issue de la conception détaillée
Le design monobloc de la structure interne des armoires de distribution électrique a fait l’objet d’une analyse approfondie lors de la phase de conception détaillée. L’un des objectifs principaux de cette étude était de limiter la quantité de matière utilisée, en particulier celle associée aux éléments de support. À cet effet, la géométrie retenue se caractérise par des zones en surplomb conçues sous forme d’arches, ne nécessitant aucun support d’impression lors du procédé de fabrication additive. Cette approche permet ainsi d’éliminer toute production de matière résiduelle liée aux supports d’impression.
Deuxième impression 3D : analyse d’un échec de fabrication
Malgré l’attention particulière portée à la conception de ce design, la seconde tentative d’impression s’est soldée par un échec de fabrication. Lors de cette opération, la tête de l’imprimante 3D est entrée en collision avec le modèle en cours d’impression, comme l’illustre la photo associée. Afin de limiter les pertes de matière et de temps, aucune nouvelle impression de ce design n’a été engagée à ce stade.
À ce jour, la cause principale avancée pour expliquer cet incident semble être liée à la taille du fichier numérique stocké sur la carte SD utilisée par l’imprimante 3D Anet A8 du projet BATLab112. Il apparaît en effet que le lecteur de carte SD de la carte électronique de l’imprimante présente des dysfonctionnements lors de la lecture de fichiers volumineux, en particulier lorsque la carte a fait l’objet de multiples cycles d’écriture et de suppression.
Afin de prévenir la récurrence de ce phénomène, deux mesures correctives ont été mises en œuvre. La première consiste à recourir à des cartes SD de faible capacité (8 Go), dédiées exclusivement au stockage des fichiers définitifs avant impression, en limitant les opérations d’écriture. La seconde, détaillée dans le chapitre suivant, repose sur une modification du design du prototype visant à réduire les durées d’impression des pièces.
À la date de mise en ligne de cet article, l’application conjointe de ces deux actions a permis d’éliminer l’apparition de ce dysfonctionnement.
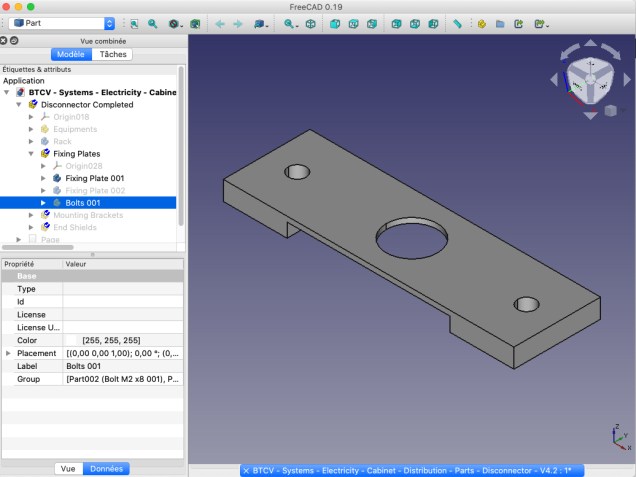
Évolution du design de la structure interne des armoires électrique du diorama
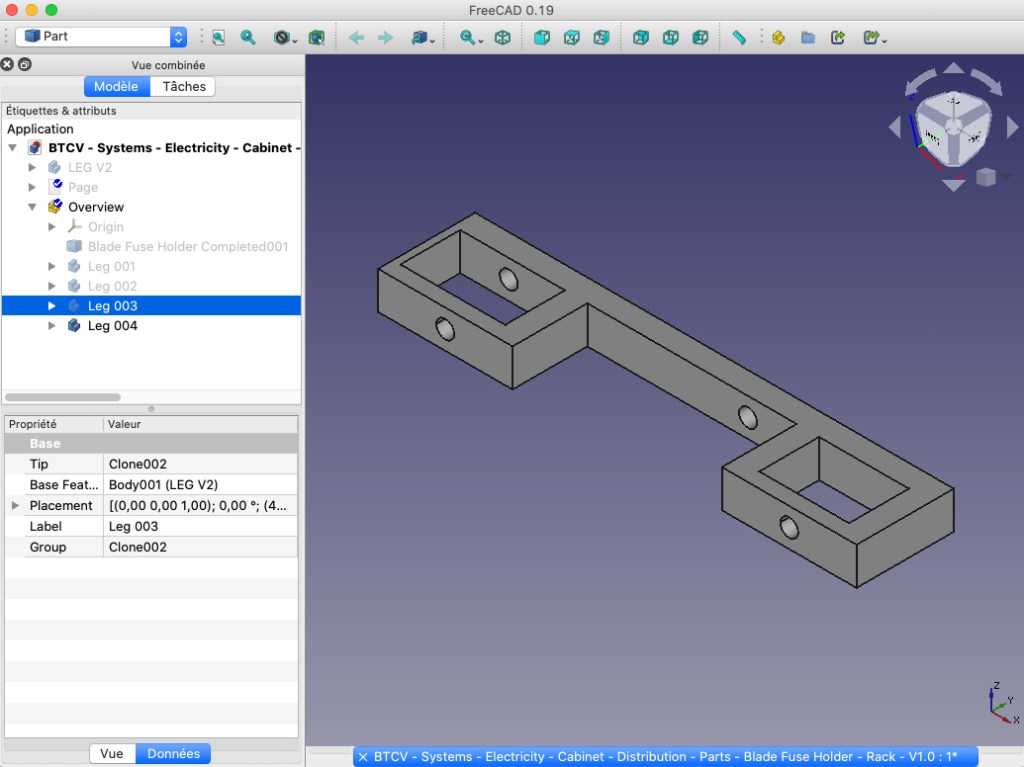
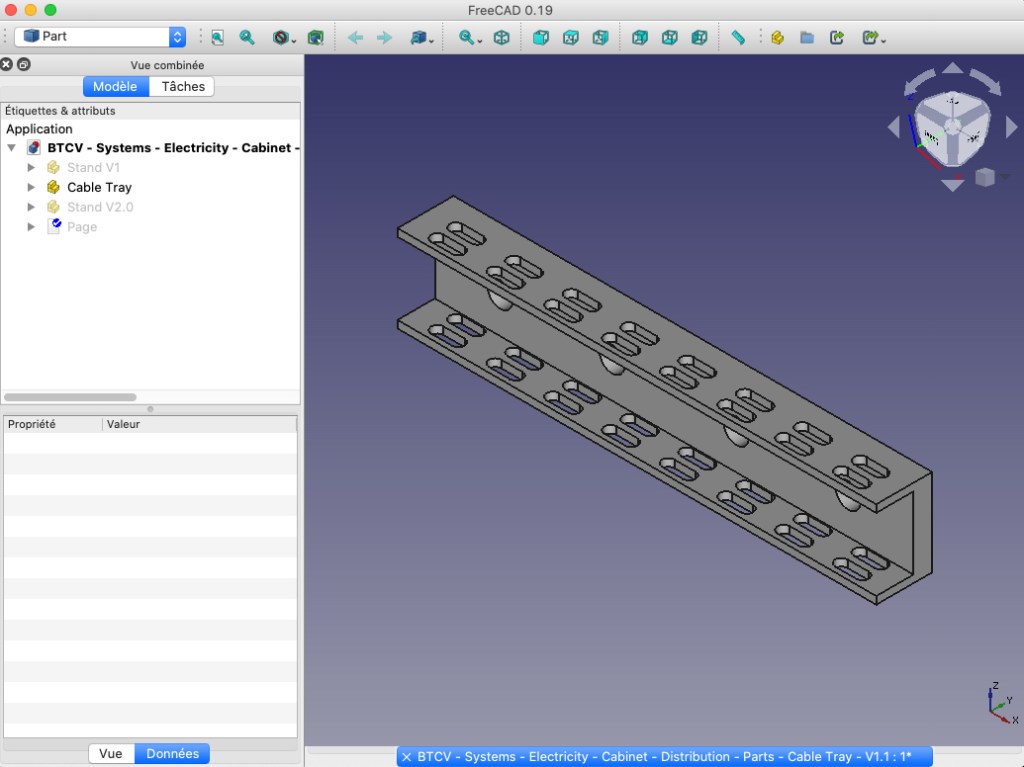
Le nouveau design résulte d’une approche alternative fondée sur la décomposition de la structure en plusieurs éléments distincts, comme l’illustre la capture d’écran de la vue éclatée réalisée à l’aide du logiciel FreeCAD. L’intérêt de cette démarche réside dans la conception de pièces de dimensions réduites et de géométrie majoritairement plane, permettant de diminuer les temps d’impression et de s’affranchir de l’utilisation de supports d’impression. En contrepartie, cette approche implique la définition et la conception des interfaces d’assemblage entre les différents éléments constitutifs de la structure.
Bien que cette méthode de conception ne permette pas d’exclure totalement la réapparition des dysfonctionnements précédemment observés, elle garantit néanmoins une réduction significative de l’impact potentiel en termes de durée d’impression et de quantité de matière susceptible d’être perdue.
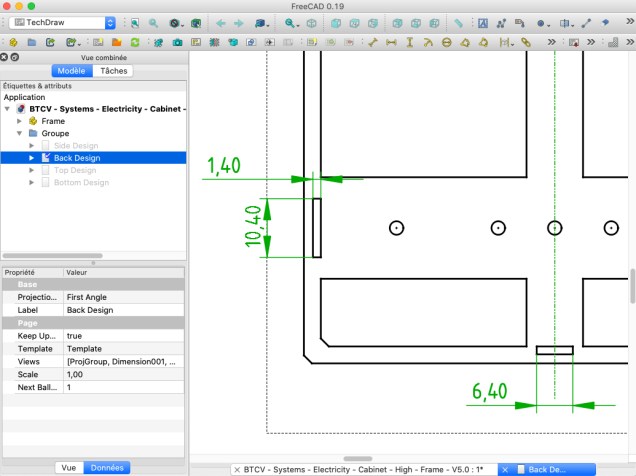
Modélisation 3D du nouveau design de la structure interne des armoires électriques du diorama avec FreeCAD
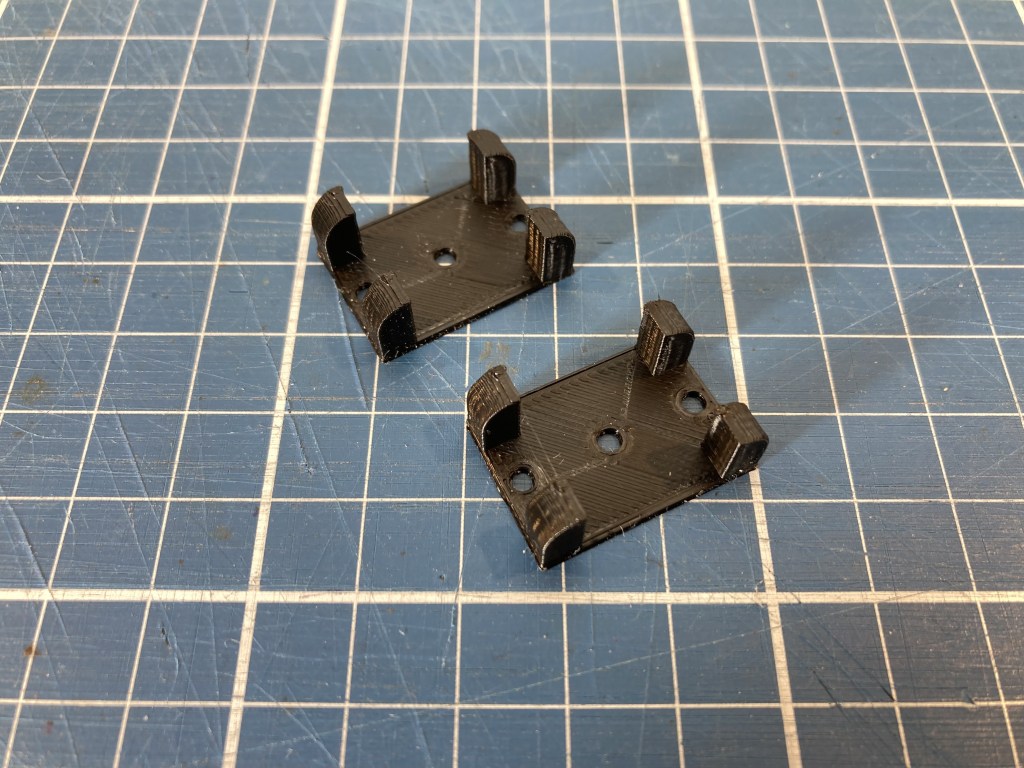
Impression 3D d’une structure modulaire des armoires électriques du diorama
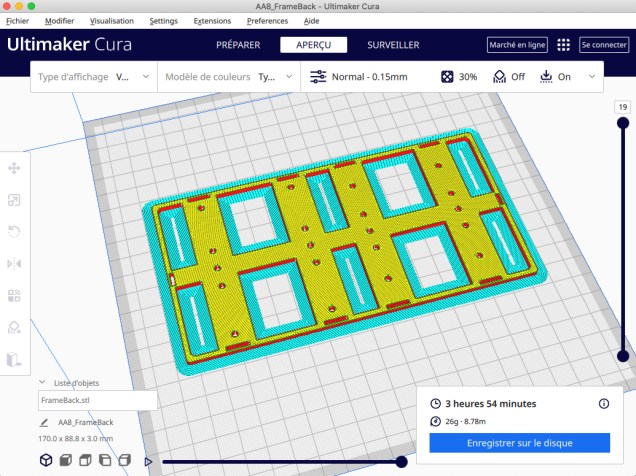
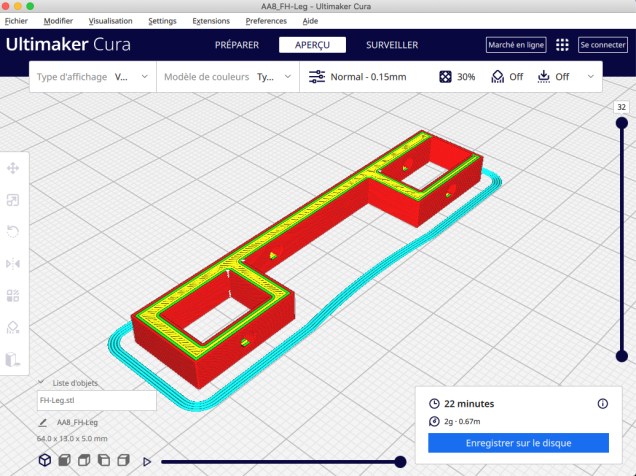
Préparation du fichier pour impression 3D avec Cura
Impression 3D des éléments de la structure modulaire
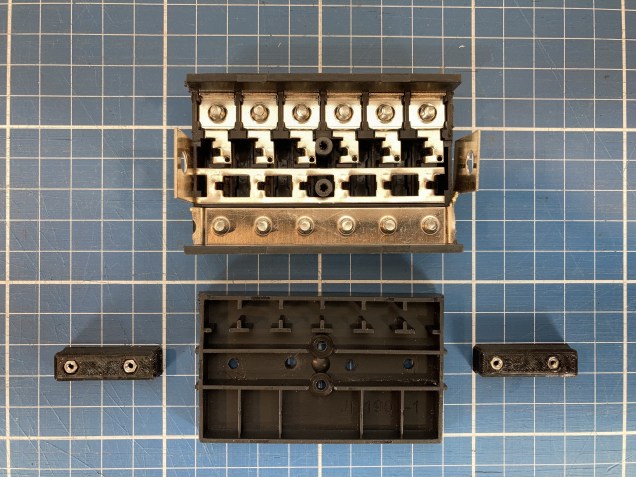
Chaque élément constituant la structure interne de l’armoire de distribution est imprimé individuellement. Les deux côtés de l’armoire présentent une symétrie identique, impliquant l’impression en double du même design. Afin de réduire les durées d’impression, les pièces ont été réalisées en qualité « Normal » avec une épaisseur de couche de 0,15 mm. Ce réglage n’offre pas le rendu optimal en termes de finition de surface, mais il reste satisfaisant, la structure interne n’étant ni visible de l’extérieur ni significativement perceptible de l’intérieur.
L’ensemble de ces pièces a été imprimé sans rencontrer la problématique observée précédemment avec le modèle monobloc, confirmant la pertinence de l’approche de décomposition du design.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
Assemblage de la structure des armoires électriques du diorama
L’assemblage de la structure est réalisé par emboitement des pièces. Les côtes des éléments d’assemblage tenon-mortaise ont été obtenues de manière empirique pour prendre en compte la précision d’impression.
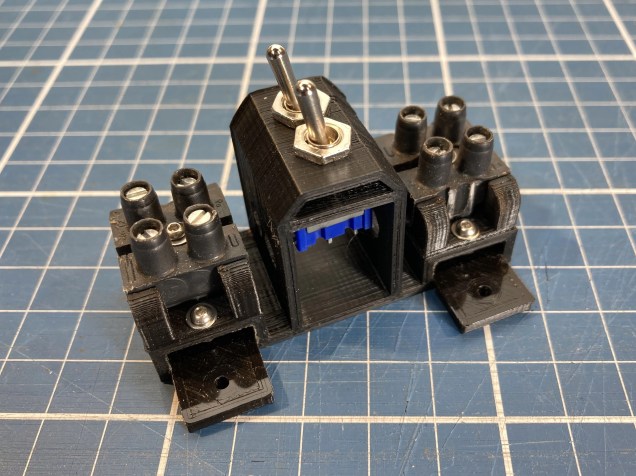
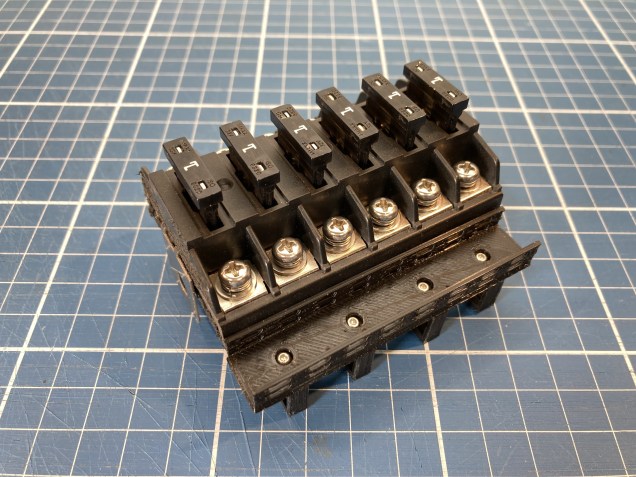
Fabrication du module sectionneur des armoires de électrique du diorama
Impression 3D de la structure mécanique du sectionneur électrique
Pour des raisons de gestion des temps d’utilisation de l’imprimante, les pièces composant le sectionneur sont imprimées unitairement.
Assemblage des composants du sectionneur électrique
L’assemblage des différentes pièces du sectionneur est réalisé à l’aide de boulons de type M2. Les blocs de jonction électrique sont positionnés dans leurs supports respectifs, lesquels sont ensuite fixés sur le corps principal du sectionneur. Les deux interrupteurs sont maintenus par deux écrous chacun. Dans les modèles opérationnels, afin de prévenir tout desserrage des écrous susceptible de provoquer leur chute à l’intérieur de l’armoire électrique sous tension — et donc d’engendrer des courts-circuits —, l’utilisation de frein-filet est prévue sur l’ensemble des boulons.
Câblage interne du module sectionneur électrique du diorama
Le câblage est réalisé à l’aide de conducteurs en cuivre rigide de couleur rouge et bleue, d’une section de 2,5 mm². Cette section dépasse les exigences des normes de câblage électrique, compte tenu du courant maximal de 6 A circulant dans ces conducteurs. Par ailleurs, cette configuration offre un rendu esthétique satisfaisant.
Fabrication du module porte fusible des armoires électrique du diorama
Lors de la phase de conception détaillée, le design du porte-fusible a fait l’objet d’une étude spécifique. Aucun des modules disponibles sur le marché ne répondait pleinement aux exigences du projet, tant en termes de nombre de voies que de dimensions. La fabrication d’un porte-fusible complet aurait été fastidieuse et aurait présenté un résultat incertain sur le plan des contraintes mécaniques et électriques. Par conséquent, le choix s’est porté sur l’utilisation d’un boîtier automobile à six voies avec point commun, dont l’enveloppe mécanique peut être modifiée afin de répondre aux contraintes d’intégration au sein de la structure de l’armoire.
Impression 3D des supports mécaniques du module porte fusible
Impression 3D des chemins de câble du module porte fusible
Assemblage du module porte fusible
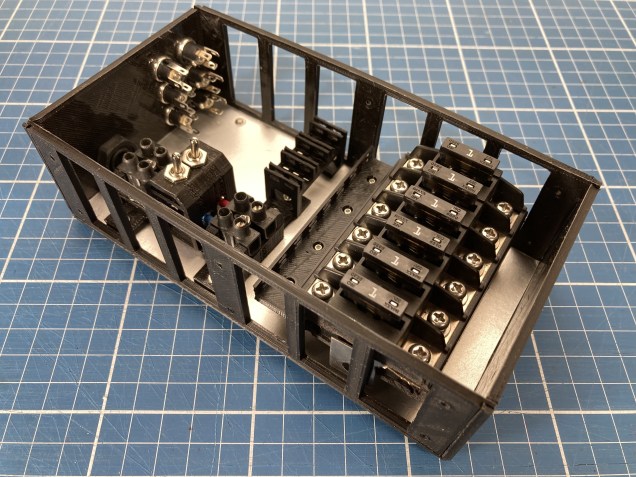
Assemblage final des modules composants une armoire de distribution électrique du diorama
Câblage interne d’une armoire de distribution électrique du diorama
Le bloc porte-fusibles est connecté à la sortie du sectionneur à l’aide de deux conducteurs en cuivre rigide de section 2,5 mm². L’emploi de cette section, identique à celle utilisée pour le sectionneur, assure la cohérence du câblage ainsi que le respect des normes électriques en vigueur. Par ailleurs, chaque connecteur de sortie de l’armoire est raccordé au bloc porte-fusibles au moyen de deux conducteurs de calibre 20 AWG.
Voir aussi
Des articles sur l’avancement du réseau électrique du diorama
L’origine de ma réflexion concernant l’usage d’un diorama comme support pédagogique s’inscrit initialement dans une démarche centrée sur la commande de bras robotiques. Cette orientation répondait pleinement à mon objectif de renouer avec des disciplines telles que l’électronique, l’automatisme et la robotique. Elle s’articulait également avec l’intérêt croissant que je portais à la technologie Arduino. Ayant étudié, au cours de mon cursus, la programmation de microcontrôleurs et d’automates programmables, j’ai été particulièrement impressionné par la simplicité d’utilisation et le potentiel offert par les cartes Arduino.
Cette réflexion serait probablement demeurée au stade théorique — limitée à quelques esquisses conceptuelles et fichiers de modélisation 3D conçus sous FreeCAD — sans un événement déterminant pour la suite du projet : la réception, à titre de don, d’une carte Arduino Due. Ce geste a constitué un véritable catalyseur, me conduisant à passer de la conceptualisation à l’expérimentation concrète. J’ai ainsi entrepris de me familiariser avec l’environnement matériel et logiciel propre à cette carte, prélude au développement d’une première maquette de bras robotique pilotée par l’Arduino Due.
Malgré les imperfections inhérentes à cette première construction, cette maquette a constitué une étape décisive en rendant le projet tangible et dynamique. Elle a renforcé ma motivation à poursuivre son développement. Je suis pleinement conscient que cette avancée doit beaucoup à Rémi, membre de ma famille et généreux donateur de la carte, dont le geste a joué un rôle déterminant dans l’évolution du projet.
Quelques années plus tard, dans le cadre du développement du projet BATLab112, j’ai été amené à mobiliser d’autres modèles de cartes Arduino, parmi lesquels les cartes Uno et Mega, ainsi qu’un ensemble de modules complémentaires tels que des capteurs divers et des écrans tactiles. Le modèle de console de commande conçu pour piloter les différents systèmes du diorama à l’échelle 1/12 intègre notamment deux cartes Arduino Mega. Celles-ci assurent à la fois la gestion de l’affichage sur deux écrans tactiles et l’interprétation des commandes émises par l’utilisateur.
Cet article propose une analyse technique approfondie des choix relatifs au câblage du réseau électrique du diorama pédagogique de la Batcave, reproduisant à l’échelle 1/12 une infrastructure électrique fonctionnelle. Il s’inscrit dans le cadre de la documentation technique du projet, en explicitant la conception et le dimensionnement du réseau de distribution électrique depuis la sortie…
Cet article propose une analyse technique approfondie des choix relatifs au câblage du réseau électrique du diorama pédagogique de la Batcave, reproduisant à l’échelle 1/12 une infrastructure électrique fonctionnelle. Il s’inscrit dans le cadre de la documentation technique du projet, en explicitant la conception et le dimensionnement du réseau de distribution électrique depuis la sortie du convertisseur de puissance jusqu’aux consoles de commande. Cette étude méthodique aborde successivement la structuration du réseau de distribution, l’architecture interne des armoires électriques, les bilans de courant nécessaires à la définition des sections des câbles d’entrée et de sortie, ainsi que les critères retenus pour assurer une chute de tension conforme aux exigences fonctionnelles et de sécurité. Par cette démarche, l’article vise à clarifier les principes de câblage qui garantissent l’alimentation adéquate des éléments actifs du diorama, tout en respectant des contraintes techniques propres à un modèle réduit fonctionnel.
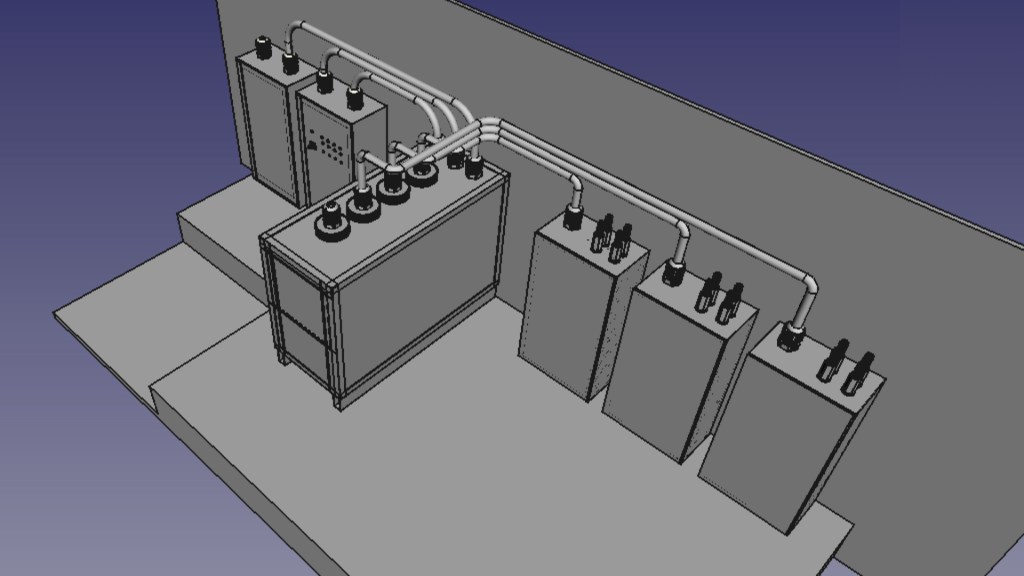
Architecture du réseau électrique du diorama
Le réseau électrique du diorama de la Batcave est conçu pour assurer la distribution de l’énergie nécessaire à l’alimentation des composants actifs, tels que les moteurs, les écrans, les capteurs et les dispositifs d’éclairage à LED. Son architecture est structurée en quatre sous-ensembles fonctionnels distincts.
Le poste HT/BT, implanté au niveau −2 du diorama au sein du local électrique, assure le raccordement au réseau domestique 230 V – 50 Hz et la conversion de la tension secteur en très basses tensions continues (12 V, 6 V et 5 V), adaptées aux exigences des différents équipements.
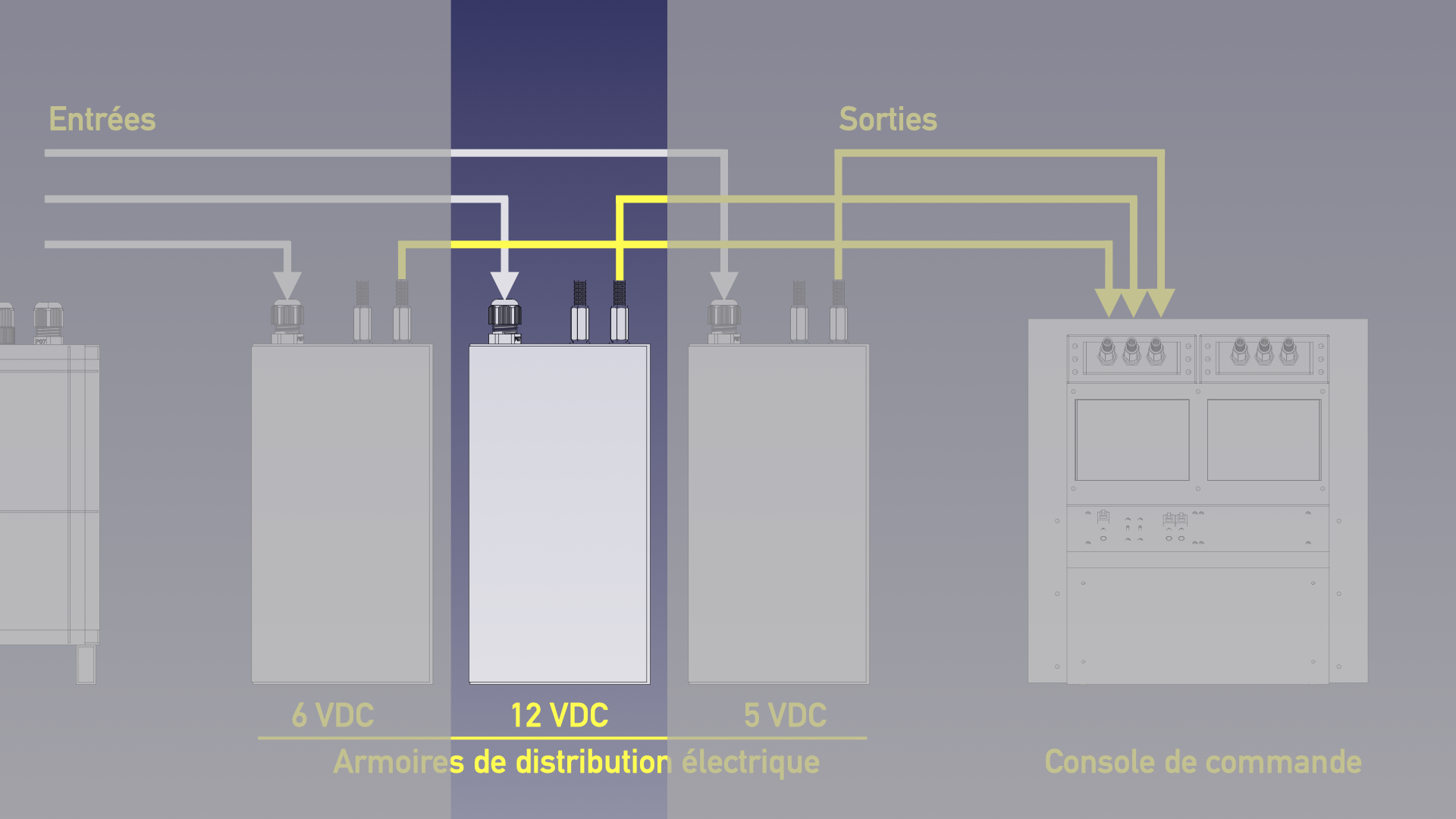
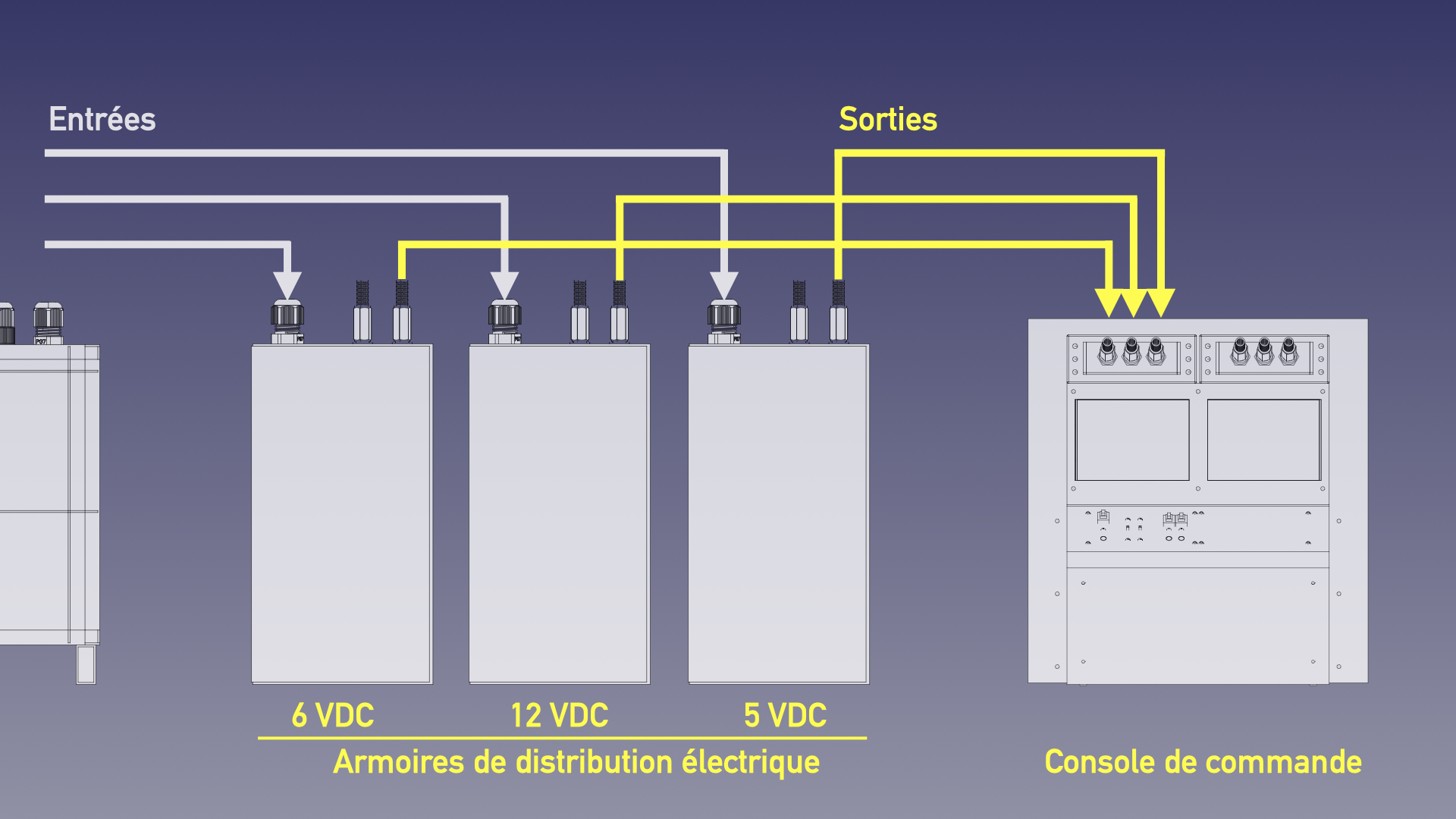
Les armoires de distribution, également situées dans le local électrique, permettent la démultiplication et la répartition de ces tensions vers les consoles de commande.
Le panneau de raccordement, implanté au niveau −1, centralise l’ensemble des liaisons issues des capteurs et des armoires de distribution avant leur connexion aux consoles.
Les consoles de commande, situées au même niveau, assurent le pilotage des composants actifs du diorama en intégrant les commandes manuelles, automatiques et les informations issues des capteurs.
Détail du réseau de distribution électrique vers les consoles de commande des équipements industriels du diorama
Le câblage interne du poste HT/BT ayant déjà fait l’objet d’une étude propre, cet article se focalise sur les armoires de distribution, le câblage électrique depuis la sortie du convertisseur de puissance jusqu’aux consoles de commande.
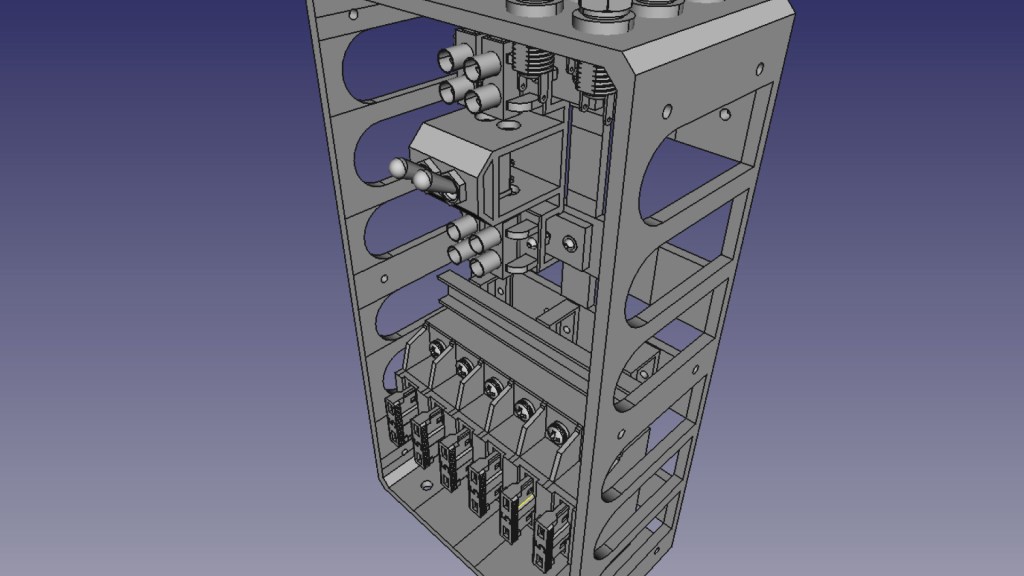
Armoires de distribution électrique du diorama
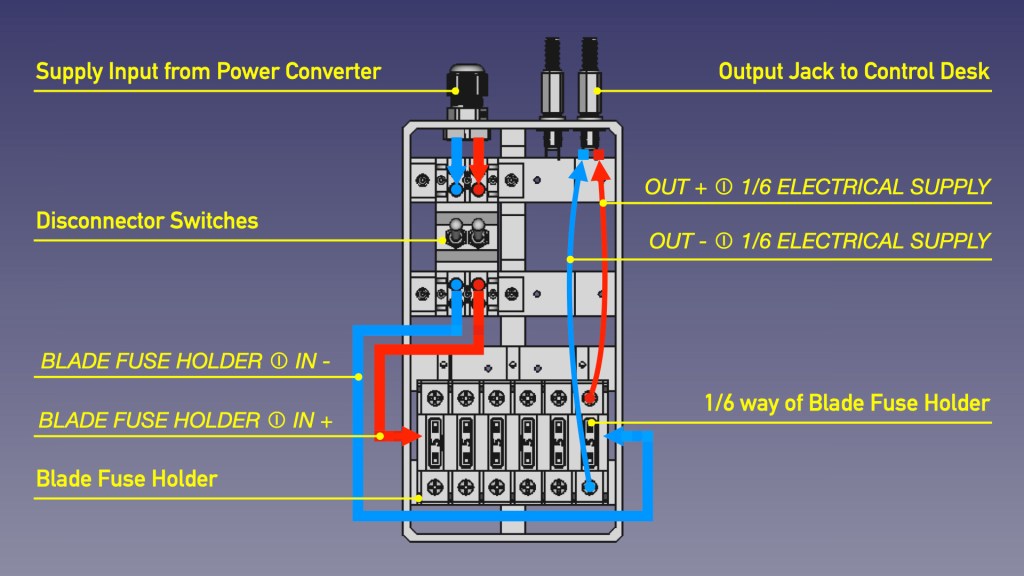
Le câblage du réseau de distribution électrique doit être conçu en prenant en considération l’ensemble des liaisons, tant en entrée qu’en sortie des armoires de distribution, ainsi que leur câblage interne. Les conducteurs d’entrée se prolongent au sein des armoires par le câblage interne, organisé dans la colonne descendante située sur la partie gauche de celles-ci. À l’inverse, les conducteurs associés à la colonne montante, disposée sur la partie droite des armoires, assurent la continuité du câblage interne vers l’extérieur et se prolongent par les câbles de sortie en direction des consoles de commande.
Câblage interne des armoires de distribution électrique
Les câbles d’entrée
Les câbles d’entrée, issus du convertisseur de puissance, assurent l’alimentation électrique de l’armoire de distribution. Ils pénètrent dans celle-ci par l’intermédiaire du presse-étoupe « Supply Input », avant d’être raccordés aux interrupteurs-sectionneurs. En aval de ces dispositifs de coupure, les conducteurs sont connectés au porte-fusibles de type Blade Fuse Holder. L’intensité du courant électrique circulant dans les câbles d’entrée correspond à la somme des intensités des courants délivrés par les six voies de sortie de l’armoire.
Les câbles de sortie
Les câbles de sortie sont prélevés sur chacune des six voies du porte-fusibles et raccordés aux bornes d’un connecteur de sortie de type Output Jack. L’intensité du courant circulant dans chaque paire de conducteurs est dimensionnée en fonction des besoins énergétiques d’une seule console de commande, pour la tension fournie par l’armoire de distribution.
Bilan électrique du diorama
Introduction
Le bilan électrique constitue une étape fondamentale dans le dimensionnement d’un réseau électrique, en permettant d’évaluer de manière globale et cohérente les besoins énergétiques d’un système. Il repose sur l’identification et la quantification des puissances et des courants associés à l’ensemble des charges alimentées, en tenant compte de leurs régimes de fonctionnement et de leurs conditions d’exploitation. Cette approche analytique vise à assurer l’adéquation entre les sources d’alimentation, les dispositifs de protection et les conducteurs, tout en garantissant la continuité de service, la sécurité des installations et la conformité aux contraintes normatives.
Métrique du bilan électrique des composants du diorama
Ce bilan électrique a pour but d’évaluer les ordres de grandeur des courants électriques, véhiculés par les câbles, afin de pouvoir en définir leur section. Ce bilan électrique porte sur les valeurs suivantes :
Caractéristiques
Désignation
P0 (mW)
Puissance à vide en milli-Watt
Pn (mW)
Puissance nominale en milli-Watt
Un (V)
Tension nominale en Volt
I0 (mA)
Courant à vide en milli-Ampère
In (mA)
Courant nominal en milli-Ampère
Is (mA)
Courant de décrochage en milli-Ampère ( Pour les moteurs 6VDC )
Information complémentaire
Il est important de noter que ce bilan électrique ne prend pas en compte l’alimentation en énergie électrique des 4 moteurs 12VDC du pont élévateur. Une armoire électrique spécifique au pont élévateur sera développée ultérieurement dans le projet.
Bilan électrique des armoires de distribution 12VDC
Les tensions de 12VDC sont utilisées pour alimenter en énergie électrique les deux Cartes Arduino Mega qui pilotent les deux écrans tactiles de la console. Le tableau suivant présente les bilans électriques d’une carte Arduino Mega à vide et d’un écran tactile TFT 2,8″ en fonctionnement nominal. La somme de ces valeurs correspondent aux valeurs utiles en entrée de la Console de commande.
Matériel
P0(mW)
Pn(mW)
Un(V)
I0(mA)
In(mA)
Carte Arduino Mega (1)
630
(*)
12
52
(*)
Ecran TFT 2,8″ (2)
(**)
330
3,3
(**)
100
Total (Arduino + Ecran) x2
1920
12
160
(*) Les mesures de la carte Arduino portent uniquement sur la consommation électrique à vide
(**) Les mesures de l’écran portent sur la consommation électrique en fonctionnement nominal
Bilan électrique des armoires de distribution 6VDC
Les tensions de 6VDC sont utilisées pour alimenter en énergie électrique les mini moteurs de la plateforme rotative et du pont roulant, via la console de commande. Le tableau suivant présente le bilan électrique pour le moteur 6VDC 300 RPM de la plateforme rotative et les 2 moteurs 6VDC 10 RPM du pont roulant ainsi le contrôleur L298N.
(*) Les courants I0 et In s’additionnent pour le calcul de la puissance nominale
Bilan électrique des armoires de distribution 5VDC
Les tensions de 5VDC sont utilisées pour alimenter en énergie électrique les cartes électroniques du panneau de commande et les relais implantées dans la console de commande. Le tableau suivant présente le bilan électrique pour les composants actifs ; relais et leds. La carte électronique des relais contient 5 relais. La carte électronique du panneau des commandes contient 7 leds. Pour ce calcul, nous considérons que tous les relais et toutes les leds peuvent être actifs en même temps.
Le dimensionnement des sections de câble électrique constitue un élément essentiel de la conception des réseaux de distribution, car il conditionne à la fois la sécurité, la fiabilité et la performance des installations. Il repose sur l’analyse des courants à transporter, des longueurs de liaison et des conditions d’exploitation, afin de limiter l’échauffement des conducteurs et de maîtriser les chutes de tension. Cette démarche intègre également les exigences normatives et les dispositifs de protection, garantissant une alimentation électrique adaptée aux charges tout en assurant la pérennité de l’infrastructure.
Section des câbles d’entrée
Les tableaux suivants, présentes pour chacune des armoires électriques, l’impact du choix de section des câbles d’entrée en fonction du résultats des bilans électriques précédents. La longueur des câble d’entrée est fixée à 1m.
Armoire de distribution 12VDC
La valeur de l’intensité du courant électrique prise pour ce calcul est de 400 mA pour une console de commande, en prenant 20% de marge par rapport au résultat du bilan électrique précédent. Dans la perspective où 6 consoles de commandes sont alimentées en énergie électrique par les 6 sorties de l’armoire de distribution, la valeur de l’intensité du courant électrique prise en référence est de 6 x 400 = 2400 mA.
S (mm2)
I(mA)
L (m)
R (ohm)
△U(mV)
△U(%)
0,5
2400
1
0,03
72
0,6%
1
2400
1
0,02
48
0,4%
1,5
2400
1
0,01
24
0,2%
Armoire de distribution 6VDC
L’armoire de distribution électrique est dimensionnée pour 6 sorties. Le bilan électrique prend en compte l’utilisation de 2 sorties seulement (Plateforme et Pont roulant). Par conséquent, la valeur de l’intensité du courant électrique est multipliée par 3, soit un total de 600 mA. La valeur de l’intensité du courant électrique prise en référence pour ce calcul est de 720 mA, en prenant 20% de marge, par rapport au résultat du bilan électrique.
S (mm2)
I(mA)
L (m)
R (ohm)
△U(mV)
△U(%)
0,5
720
1
0,03
21,6
0,4%
1
720
1
0,02
14,4
0,2%
1,5
720
1
0,01
7,2
0,1%
Armoire de distribution 5VDC
La valeur de l’intensité du courant électrique prise pour ce calcul est de 630 mA, en prenant 20% de marge, par rapport au résultat du bilan électrique. Dans la perspective ou 6 consoles de commandes sont alimentées en énergie électrique par les 6 sorties de l’armoire de distribution, la valeur de l’intensité du courant électrique prise en référence est de donc de 6 x 630 = 3800 mA.
S (mm2)
I(mA)
L (m)
R (ohm)
△U(mV)
△U(%)
0,5
3800
1
0,03
114
2,3%
1
3800
1
0,02
76
1,5%
1,5
3800
1
0,01
38
0,8%
Conclusion
Une section de câble au moins égale à 0,5mm2 est suffisante pour obtenir une chute de tension en ligne inférieure à 1% pour les armoires de distribution électrique de 12VDC et 6VDC. Par contre, une section de câble au moins égale à 1,5mm2 est nécessaire pour obtenir une chute de tension inférieure à 1% pour l’armoire de distribution électrique 5VDC.
Section des câbles de sortie
Armoire de distribution 12VDC
La valeur de l’intensité du courant électrique prise en référence est de 200 mA en prenant une marge de sécurité d’au moins 20% par rapport à la valeur du bilan électrique.
S (mm2)
I(mA)
L (m)
R (ohm)
△U(mV)
△U(%)
0,5
200
2
0,07
14
0,1%
1
200
2
0,03
6
< 0,1%
1,5
200
2
0,02
4
< 0,1%
Armoire de distribution 6VDC
En prenant en compte la configuration la plus sévère (2 moteurs 300 RPM + 1 Contrôleur L298N), la valeur de l’intensité du courant électrique prise en référence est de 200 mA, en prenant une marge de sécurité d’au moins 20% par rapport à la valeur du bilan électrique.
S (mm2)
I(mA)
L (m)
R (ohm)
△U(mV)
△U(%)
0,5
200
2
0,07
14
0,2%
1
200
2
0,03
6
0,1%
1,5
200
2
0,02
4
< 0,1%
Armoire de distribution 5VDC
La valeur de l’intensité du courant électrique prise en référence est de 650 mA en prenant une marge de sécurité d’au moins 20% par rapport à la valeur du bilan électrique.
S (mm2)
I(mA)
L (m)
R (ohm)
△U(mV)
△U(%)
0,5
650
2
0,07
46
0,9%
1
650
2
0,03
20
0,4%
1,5
650
2
0,02
13
0,3%
Conclusion
Une section de câble au moins égale à 0,5mm2 est suffisante pour obtenir une chute de tension en ligne inférieure à 1% pour les 3 armoires de distribution électrique.
Bilan de dimensionnement du câblage du réseau électrique du diorama
Câble
Longueur
Section
Type
AWG (1)
Depuis Convertisseur vers Armoire
1 m
1,5 mm2
Cuivre
15
Depuis Armoires vers Consoles
2 m
0,5 mm2
Cuivre
20
(1) AWG – American Wire Gauge – est une norme américaine de définition des section de câble
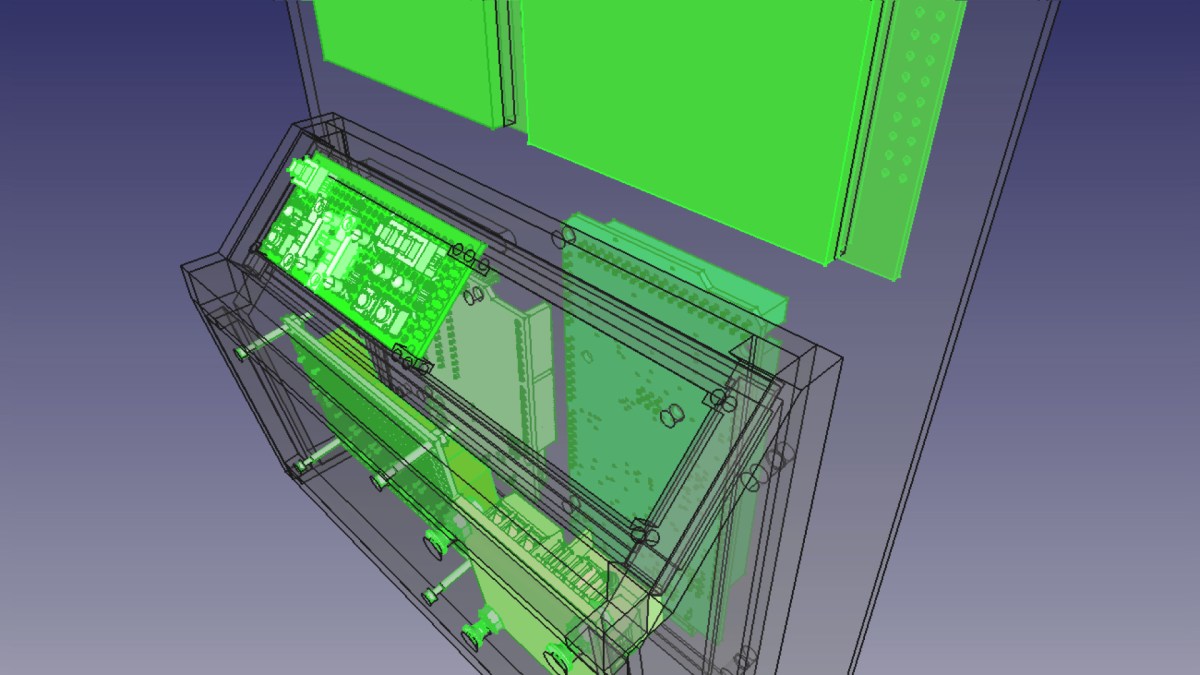
Le processus de conception d’un circuit imprimé (PCB) comporte une étape déterminante : l’implantation des composants électroniques. La qualité de cette implantation influence directement les performances du routage, c’est-à-dire l’organisation des pistes reliant les composants entre eux. Pour optimiser cet agencement, des logiciels spécialisés proposent des solutions fondées sur divers paramètres, tels que le nombre de couches disponibles, les priorités fonctionnelles ou encore les contraintes de fabrication.
Dans le contexte du projet BATLab112, cette phase d’implantation revêt une importance particulière, en raison de contraintes spécifiques liées à la reproduction d’un environnement technique fonctionnel à l’échelle 1/12. L’utilisation de FreeCAD permet de visualiser et d’anticiper ces contraintes grâce à la modélisation 3D intégrée.
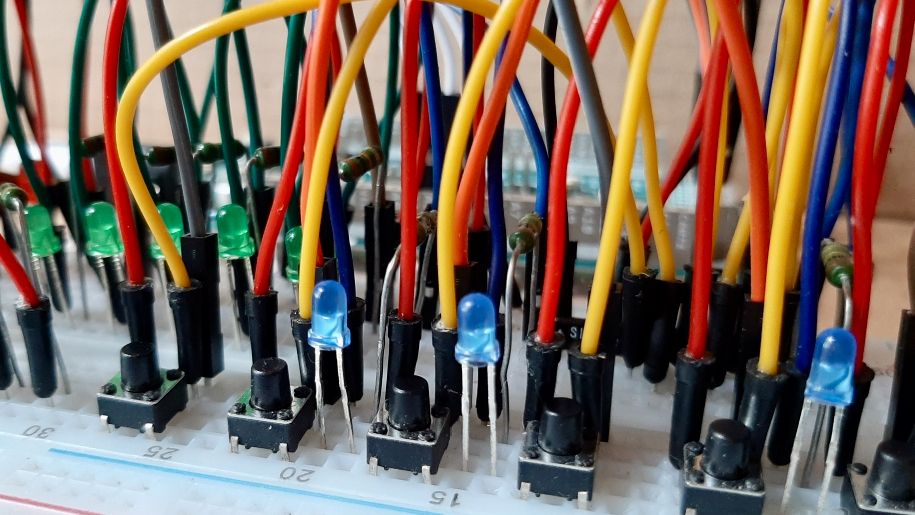
Ergonomie et cohérence fonctionnelle à l’échelle 1/12
La première contrainte concerne l’intégration des composants selon une logique d’ergonomie réaliste. Sur le PCB dédié aux commandes manuelles de la console, plusieurs éléments — boutons poussoirs, interrupteurs, voyants lumineux — doivent être positionnés conformément à une logique d’utilisation proche de celle d’un pupitre réel.
Ainsi, la disposition ne peut être arbitraire :
chaque voyant doit se situer à proximité immédiate de la commande qu’il signale ;
l’ensemble des commandes doit suivre un ordre cohérent, garantissant lisibilité, intuitivité et continuité d’usage.
Cette approche vise à préserver la valeur pédagogique et immersive du diorama technique, en assurant une correspondance entre interaction utilisateur et organisation fonctionnelle.
Contraintes de volume et d’intégration mécanique
La seconde contrainte d’implantation concerne l’intégration mécanique des composants. Chaque élément doit présenter un volume compatible avec les limites imposées par la structure du diorama. L’épaisseur totale du PCB, la hauteur des composants, ainsi que l’espace disponible dans les caissons ou parois constitutifs du modèle réduisent la liberté d’implantation classique.
L’usage de FreeCAD offre ici un avantage déterminant : la modélisation 3D permet de vérifier la compatibilité dimensionnelle, d’anticiper les conflits d’encombrement et d’ajuster précisément les choix d’implantation.
Conclusion
En conclusion, l’usage d’un logiciel spécialisé dans l’implantation et le routage de PCB ne garantit pas une prise en compte satisfaisante des deux contraintes majeures identifiées — l’ergonomie fonctionnelle à l’échelle 1/12 et l’intégration mécanique des composants. En effet, ces outils opèrent généralement sans lien direct avec l’environnement mécanique réel du projet, ce qui limite leur capacité à assurer une cohérence entre implantation électronique et contraintes structurelles.
Pour cette raison, j’ai choisi de réaliser la phase d’implantation au sein de FreeCAD, déjà utilisé pour la conception du design mécanique du dispositif. Cette intégration dans un environnement unique de modélisation 3D permet de visualiser de manière globale et précise l’impact des choix d’implantation des composants sur l’architecture générale de l’équipement dans lequel le PCB doit s’insérer. Une telle démarche favorise la cohérence entre électronique et mécanique, condition essentielle à la qualité et à la pertinence pédagogique du projet BATLab112.
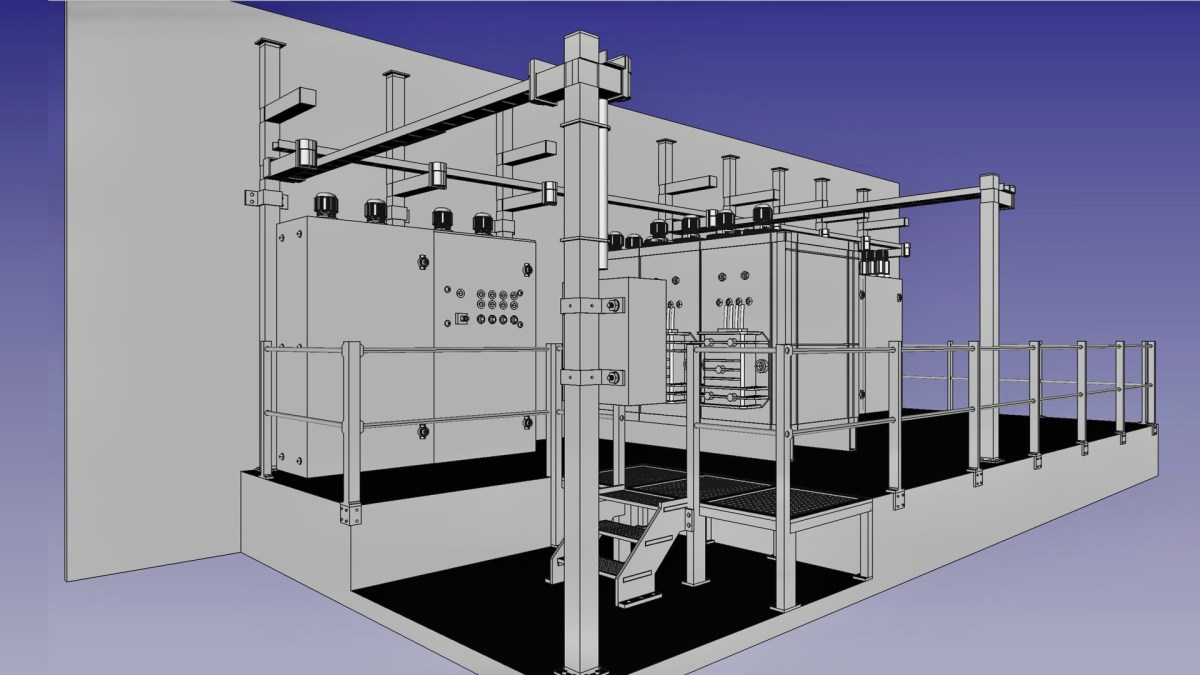
Le réseau électrique du diorama de la Batcave, développé dans le cadre du projet BATLab112, a pour fonction d’assurer la distribution de l’énergie électrique à l’ensemble des équipements du dispositif. Les quatre systèmes fonctionnels — la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques — sont pilotés par des consoles de commande dédiées, lesquelles requièrent également une alimentation électrique. En conséquence, la multiplicité des équipements, conjuguée à l’hétérogénéité des niveaux de tension requis, impose la mise en œuvre d’une infrastructure de distribution électrique spécifiquement adaptée.
Pour plus d’informations, voir les articles relatifs à la conception des équipements de la Batcave à l’échelle 1/12 :
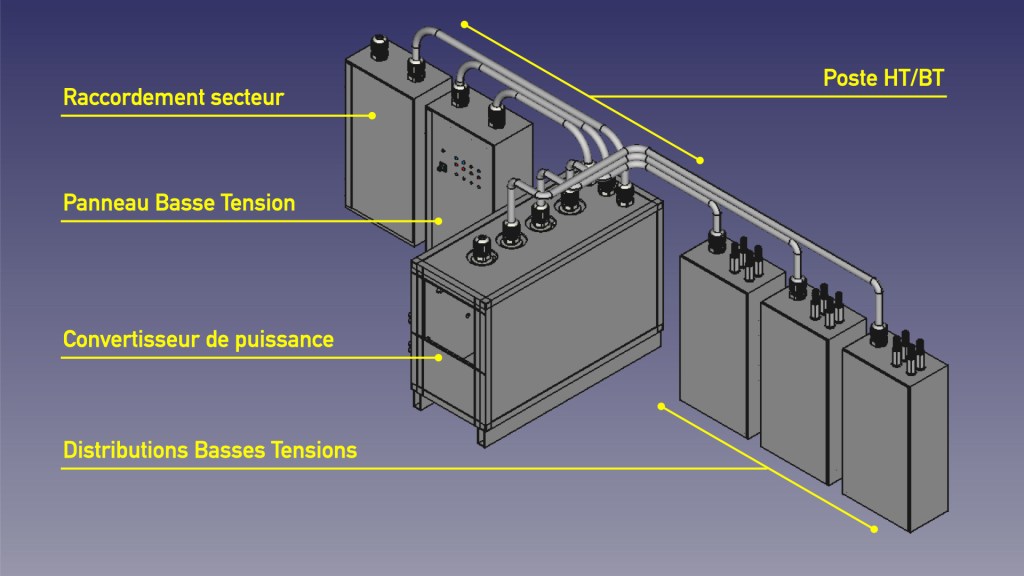
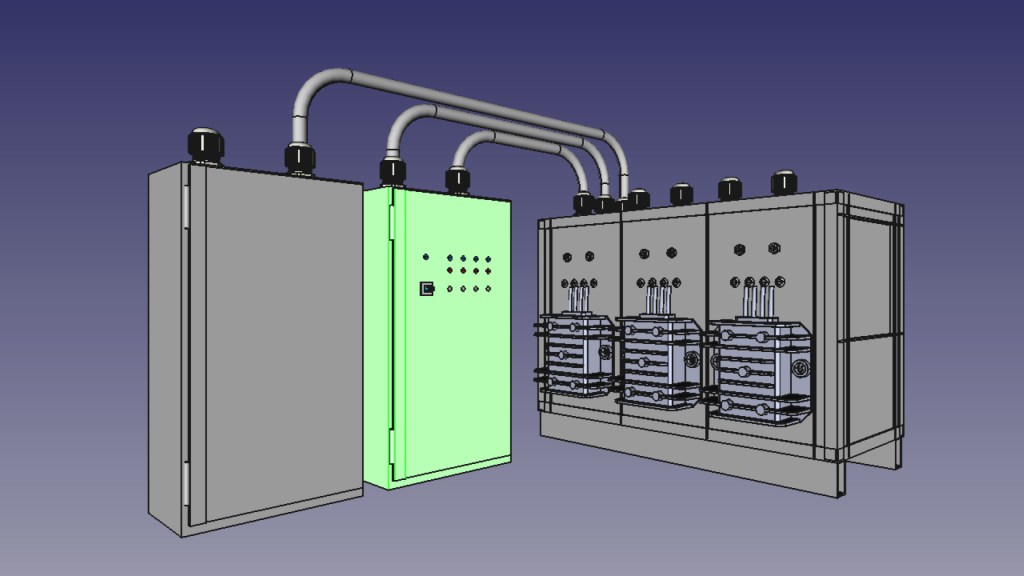
L’ensemble des dispositifs de distribution et de contrôle de l’énergie électrique est centralisé au sein d’un local technique dédié. Ce local assure la fonction de point de raccordement du diorama de la Batcave au réseau électrique, tout en intégrant l’ensemble des équipements nécessaires à la distribution de l’énergie et à son suivi opérationnel. Il abrite notamment le poste de transformation HT/BT ainsi que trois armoires de distribution correspondant aux niveaux de tension requis par les équipements du diorama, à savoir 5 VDC, 6 VDC et 12 VDC.
Structure interne
Présentation générale
A l’échelle 1:1, le module de raccordement, situé en amont du poste HT/BT, permet de raccorder un réseau de distribution électrique Basse Tension (BT), au réseau électrique Haute Tension (HT).
A l’échelle du diorama, l’armoire de raccordement assure le raccordement du réseau électrique de la Batcave, au réseau électrique domestique 230V 50Hz. L’entrée de cette armoire autorise un raccordement à une prise secteur par l’intermédiaire d’un câble électrique de type 3G 1,5 mm2.
Description détaillée
Les deux passe-câbles assurent le maintien mécanique du câble en entrée (depuis la prise secteur) et en sortie (vers le convertisseur).
Les deux borniers de raccordement assurent la connexion électriques des deux câbles.
L’interrupteur sectionneur permet d’isoler le diorama du réseau électrique.
Fonctionnement général
Une fois le raccordement au secteur réalisé, par l’intermédiaire du bornier de raccordement, le basculement de l’interrupteur sectionneur en position haute, permet d’alimenter en énergie électrique le convertisseur de puissance du diorama.
Le basculement de l’interrupteur sectionneur de l’armoire de raccordement en position basse, permet d’isoler complètement le diorama du secteur.
Cette armoire est l’unique point de raccordement au secteur du diorama, afin de garantir la sécurité des utilisateurs.
Modèles 3D
Modèle 3D du presse étoupe, passe câble, utilisé dans les 3 modules du poste HT/BT.
Modèle 3D du bloc de jonction, 230VAC, utilisé comme bornier de raccordement.
Modèle 3D de support de Led, utilisé comme passe câble du module sectionneur.
Modèle 3D des interrupteurs 230VAC utilisés comme sectionneur général du poste HT/BT.
Le convertisseur de puissance
Présentation générale
A l’échelle 1:1, le transformateur est l’équipement central du poste HT/BT. Il assure la transformation de la Haute Tension alternative du réseau de distribution électrique régional, en Basse Tension alternative 230V 50Hz.
A l’échelle du diorama, le transformateur est remplacé par un module – convertisseur de puissance -, qui assure la conversion de la tension secteur alternative 230V 50Hz en basses tensions continues compatibles avec les composants électroniques et actionneurs du projet ; électronique, moteurs…
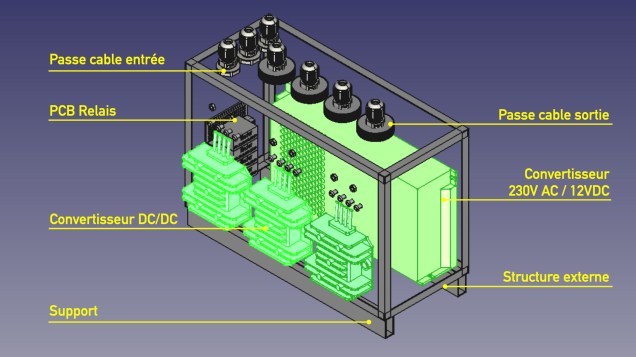
Description détaillée
Les 3 passe-câbles d’entrée assurent le maintien mécanique des câbles :
Câble 230VAC, issu de l’armoire de raccordement
Câble 12VDC, vers le tableau basse tension
Câble des commandes, issu du tableau basse tension.
Les 4 passe-câbles d’entrée assurent le maintien mécanique des câbles :
Câble 230VAC, issu de l’armoire de raccordement
Câble 12VDC, vers le tableau basse tension
Câble des commandes, issu du tableau basse tension.
Les 4 passe-câbles d’entrée assurent le maintien mécanique des câbles :
Câble 5VDC
Câble 6V DC
Câble 12V DC
Le convertisseur 230VAC/12VDC assure la conversion AC/DC de la tension secteur 230V 50Hz.
Les convertisseurs DC/DC assure la conversion de la tension 12VDC issue du convertisseur AC/DC en tensions continues plus basses ; 5VDC, 6VDC … compatibles avec les composants électroniques et actionneurs du diorama.
La carte électronique des relais assure les commutations des différentes tensions continues de sorties
Fonctionnement général
Lorsque l’interrupteur sectionneur de l’armoire de raccordement est basculé en position haute, le convertisseur 230VAC/12VDC du convertisseur de puissance, est alors alimenté en énergie électrique. Il fournit une tension de 12V continue en sortie. Cette tension alimente alors le panneau basse tension pour contrôler l’alimentation électrique des convertisseurs DC/DC.
Lorsque le convertisseur 230VAC/12VDC est sous tension, et que le bouton d’arrêt d’urgence du panneau basse tension est relâché, un appui sur un des boutons poussoirs du panneau de commande, déclenche la commande d’un relais. Ce relais commute la tension du convertisseur DC/DC correspondant, en sortie du convertisseur de puissance.
Modèles 3D
Modèle 3D de l’alimentation utilisée comme convertisseur 230VAC/12VDC.
Modèle 3D des convertisseurs de tensions 12VDC/6VDC et 12VDC/5VDC.
Modèle 3D des borniers utilisés sur la carte des relais de.commutation des tensions de sortie.
Modèle 3D des relais utilisés pour commuter les tensions de sorties du convertisseur.
Le tableau basse tension
Présentation générale
A l’échelle 1:1, le tableau BT permet de répartir l’énergie électrique sur les différents départs issus du poste de transformation. A l’échelle du diorama, cette armoire centralise les commandes des tensions continues en sortie du convertisseur.
Description détaillée
Les deux passe-câbles assurent le maintien mécanique du câble en entrée (depuis la sortie du convertisseur 230VAC/12VDC) et en sortie (vers la carte électronique des relais).
Le bornier de raccordement assure la connexion électriques des câbles.
La carte électronique – PCB des commandes -, centralise tous les circuits de commande des tensions de sortie du convertisseur de puissance.
La carte électronique – PCB des relais -, assure la commutation des différentes tensions de sortie du convertisseur de puissance, sous le contrôle des commandes.
Les cartes électroniques sont réalisées en logique câblée, à partir de relais électromagnétiques, de boutons poussoirs et de voyants de visualisation réalisés à partir de LEDs.
Fonctionnement général
Lorsque le convertisseur 230VAC / 12VDC est raccordé au réseau électrique domestique lors du basculement de l’interrupteur sectionneur de l’armoire de raccordement en position haute, il délivre en sortie une tension de 12V DC. Cette tension est alors utilisée pour alimenter en énergie électrique, une carte électronique de commande et une carte de relais qui contrôlent les tensions de sortie du convertisseur de puissance.
Modéles 3D
Modélisation 3D
FreeCAD
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
Visuels de la conception préliminaires des 3 modules composants le poste HT/BT.
GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Cet article décrit la conception détaillée d’une armoire de distribution électrique basse tension à l’échelle 1/12 pour le diorama de la Batcave du projet BATLab112. Il expose les contraintes mécaniques et fonctionnelles rencontrées, notamment l’importance d’une structure interne robuste pour maintenir les composants et faciliter les manipulations. Les systèmes réalistes à échelle réduite et leur…
La réalisation du prototype du poste HT/BT du diorama a mis en évidence les limites du mode opératoire initialement retenu pour la fabrication des armoires électriques. En particulier, l’absence de structure interne dédiée ne permet ni d’assurer une rigidité mécanique suffisante pour des manipulations répétées, ni de garantir un maintien adéquat et pérenne des composants internes de l’armoire.
L’objectif de cette démarche est double. Il s’agit, en premier lieu, de concevoir une structure interne générique, applicable à l’ensemble des armoires électriques du diorama de la Batcave. En second lieu, il convient de développer des équipements modulaires destinés à faciliter le câblage de ces armoires à l’échelle 1/12, tout en respectant de manière aussi fidèle que possible les principes de conception, d’implantation et de fonctionnement mis en œuvre à l’échelle réelle.
L’article présente la conception détaillée et la réalisation du premier prototype fonctionnel du poste électrique HT/BT à l’échelle 1/12 pour le diorama pédagogique de la Batcave du projet BATLab112. Il s’inscrit dans la phase de conception détaillée visant à reproduire avec fidélité les fonctions d’un poste électrique industriel.
Fondements du design proposé — Héritage de la phase de parangonnage
Le design présenté dans cet article, s’inscrit dans la continuité des articles précédents mais aussi de la phase de parangonnage des équipements électriques industriels existants. Dans cet article, une analyse systématique des systèmes existants à l’échelle 1 : 1, ainsi que des principes de fonctionnement et d’architecture interne des armoires de distribution, a été conduite afin d’identifier les contraintes techniques et mécaniques applicables à une reproduction à l’échelle 1 : 12. Ces éléments ont servi de base à l’élaboration des choix de conception retenus ici, notamment en matière de structure interne, d’intégration des modules (sectionneur, porte‑fusible) et d’optimisation pour fabrication additive.
Le design actuel reprend et adapte ces principes fondamentaux, en les contextualisant dans le cadre d’une approche modulaire et manufacturable par impression 3D. Cette démarche vise à garantir la fidélité fonctionnelle et mécanique des armoires tout en tirant parti des enseignements issus de la revue des équipements existants et des solutions techniques proposées dans l’article de conception détaillée original.
L’article examine les infrastructures industrielles de distribution électrique existantes en vue de leur adaptation à un diorama pédagogique représentant la Batcave. Il détaille d’abord la structure fonctionnelle d’un poste HTA/BT, qui abaisse la tension moyenne à basse tension et regroupe les dispositifs de protection, de transformation et de distribution. Ensuite, il analyse les armoires de…
Architecture des armoires de distribution électrique à l’échelle 1/12 du diorama de la Batcave
Entrées / Sorties
Les armoires de distribution électrique sont systématiquement dotées d’une entrée d’alimentation et de six sorties. À la date de publication de cet article, ce nombre de sorties excède les besoins liés aux équipements actuellement intégrés au diorama de la Batcave dans le cadre du projet BATLab112. En effet, quatre équipements sont à ce stade en cours de développement : la plateforme rotative, le pont élévateur, le pont roulant et les bras robotiques. Ces dispositifs sont chacun commandés et alimentés en énergie électrique par l’intermédiaire de leurs consoles de commande respectives. Les deux sorties restantes, volontairement non affectées, ont été prévues afin d’anticiper et de faciliter l’intégration d’évolutions fonctionnelles et de nouveaux équipements ultérieurs.
Pour + d’informations concernant la conception à l’échelle 1/12 des équipements industriels présents dans le diorama :
Les armoires de distribution électrique intègrent deux modules internes principaux : un sectionneur et un porte-fusible. Ces deux dispositifs ont été spécifiquement conçus et développés pour répondre aux exigences du projet BATLab112. Leur conception prend en compte les contraintes propres à une réalisation à l’échelle 1/12, tant sur le plan dimensionnel que sur celui de l’assemblage, tout en respectant les principes de fonctionnement, de sécurité et d’architecture habituellement mis en œuvre pour ce type de modules à l’échelle industrielle réelle.
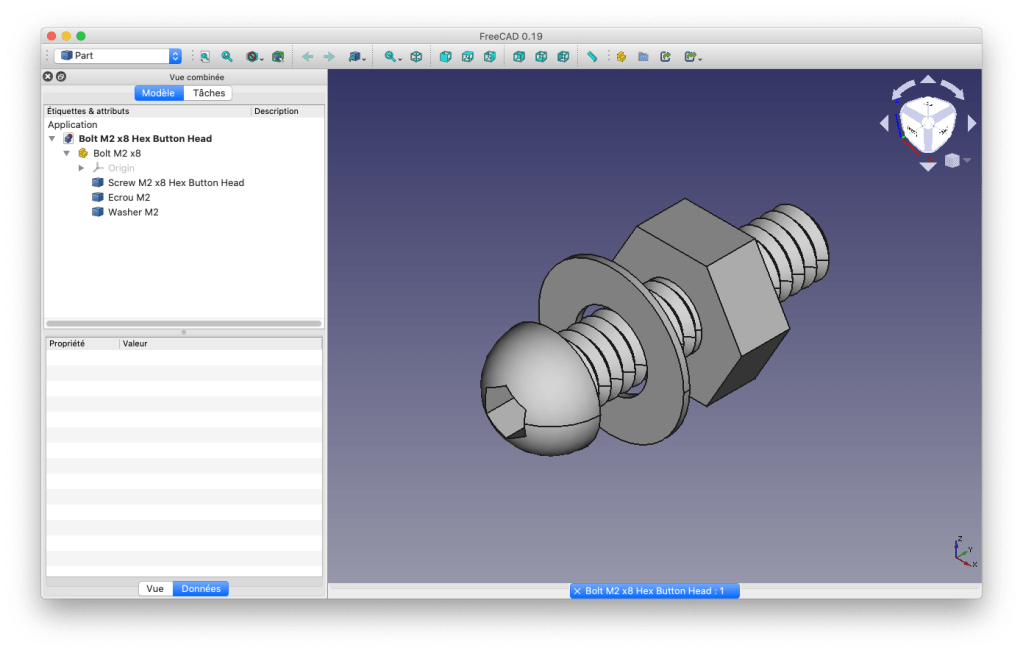
Ces deux modules sont conçus pour être solidarisés à la structure interne au moyen de boulons de type M2, garantissant à la fois un positionnement précis, une fixation mécanique fiable et une facilité de démontage compatible avec les opérations de maintenance et d’évolution du système.
Principe de fonctionnement des armoires de distribution électrique du diorama
Lorsque le sectionneur est basculé en position haute, la tension d’entrée est alors distribuée à l’ensemble des sorties de l’armoire. Les fusibles assurent une fonction de protection contre les surintensités susceptibles de survenir à la suite d’un dysfonctionnement de l’un des équipements du diorama. À l’inverse, lors du basculement du sectionneur en position basse, correspondant à l’ouverture des deux interrupteurs, l’ensemble des circuits de sortie est totalement isolé de la source d’alimentation électrique.
La tension d’entrée applicable à une armoire de distribution électrique peut correspondre à l’une des trois tensions continues utilisées par les équipements du diorama, à savoir 5 VDC, 6 VDC ou 12 VDC. Le courant maximal délivrable en sortie est déterminé conjointement par le calibre des fusibles installés et par la section du câblage interne de l’armoire. Dans sa première version, le dispositif est équipé de fusibles d’un calibre de 1 A par sortie, conduisant à un courant maximal total de 6 A en entrée.
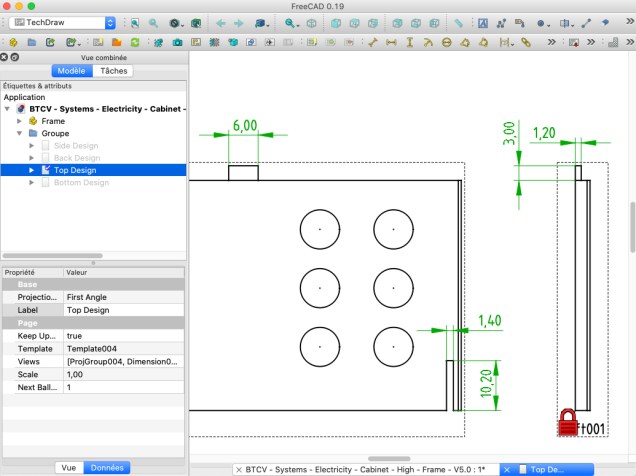
Modélisation 3D de la structure mécanique des armoires électriques du diorama
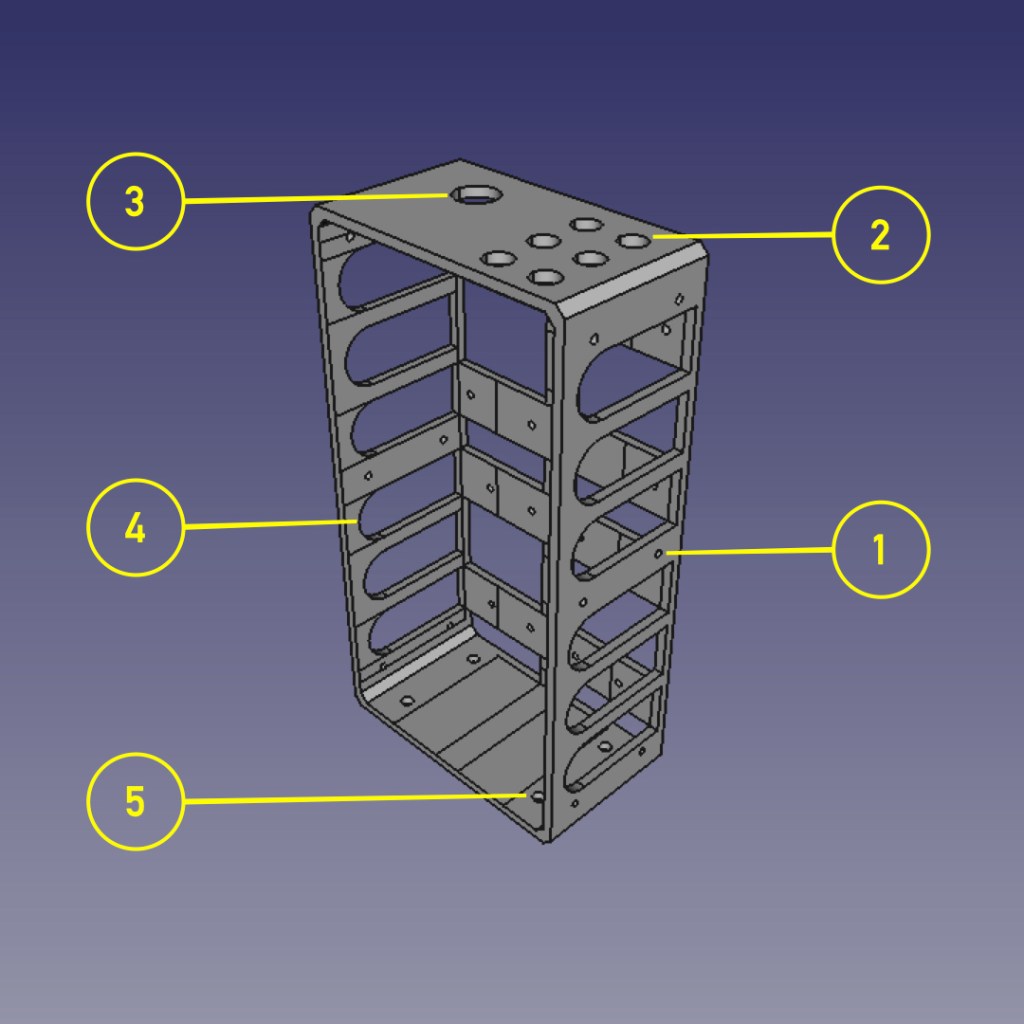
Screenshot 1 : Structure interne – Aperçu 3D 3/4 face
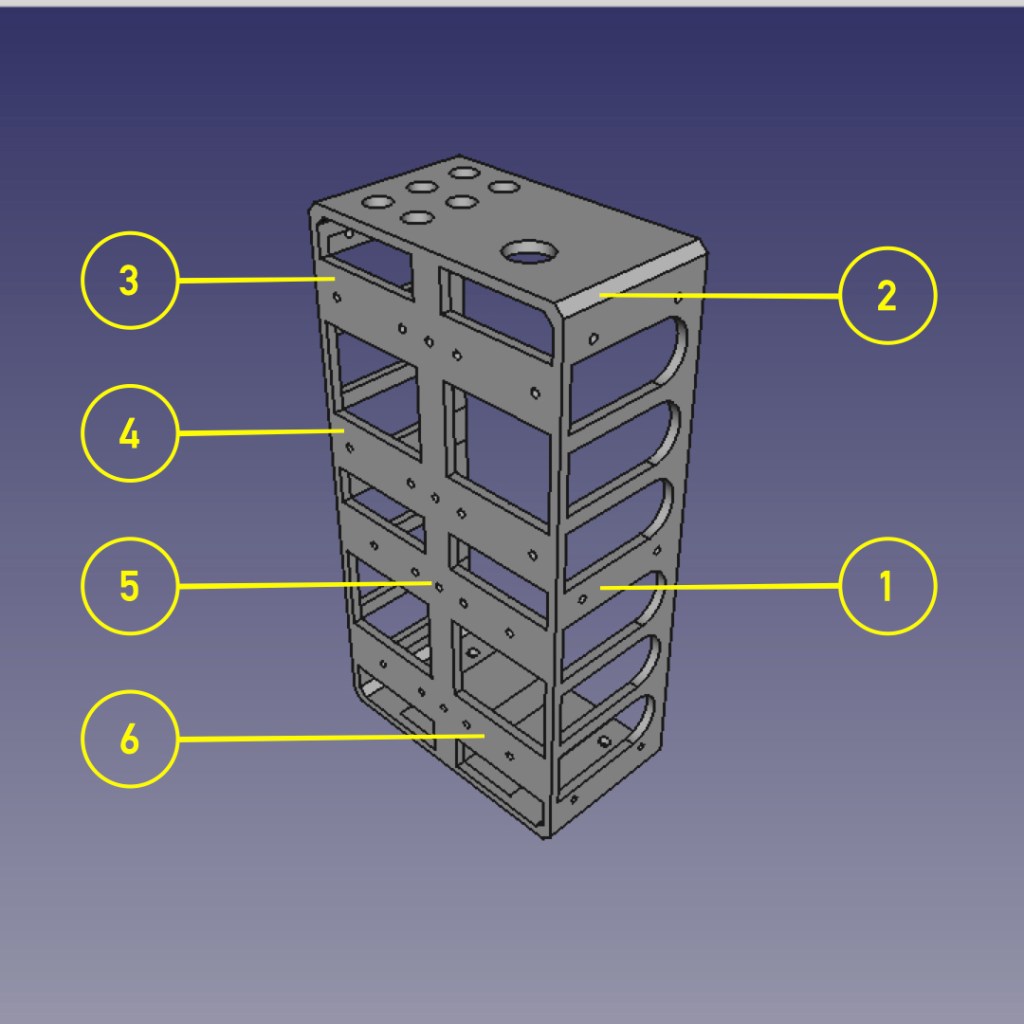
Screenshot 2 : Structure interne – Aperçu 3D 3/4 arrière
Présentation générale
La réalisation du prototype du poste HT/BT a mis en évidence les limites du mode opératoire retenu pour la fabrication des armoires électriques. En particulier, l’absence de structure interne ne permet pas d’assurer une robustesse mécanique compatible à la fois avec les contraintes d’exploitation imposées par le diorama et avec des manipulations régulières.
La conception d’une nouvelle structure interne vise à remédier à ces insuffisances en permettant la fabrication d’armoires électriques présentant des caractéristiques mécaniques adaptées aux exigences du diorama. Cette structure est spécifiquement destinée à être réalisée par fabrication additive, au moyen de l’impression 3D, afin de garantir précision dimensionnelle, répétabilité et facilité d’évolution du design.
Description détaillée
Screenshot 1
La structure interne intègre des perforations destinées à l’assemblage par boulonnage des enveloppes internes et externes.
Les emplacements pour les 6 connecteurs de type Jack en sorties.
L’emplacement pour le presse-étoupe du câble d’entrée, issu du convertisseur de puissance.
Le design global de cette structure a été optimisé pour permettre une impression 3D sans recours à des supports pour les surplombs, afin de réduire la consommation de matière et de simplifier le processus de fabrication.
La structure interne est pourvue de perçages permettant le boulonnage des armoires sur le sol du local électrique, assurant ainsi leur stabilité lors de la manipulation des portes, des boutons-poussoirs ou des interrupteurs.
Screenshot 2
Renforts latéraux pour accroitre la rigidité de la structure
Chanfrein pour prendre en compte le pli des panneaux de l’enveloppe externe.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Barre de renfort et fixation des équipements internes de l’armoire électrique.
Modélisation 3D du module sectionneur des armoires électriques du diorama
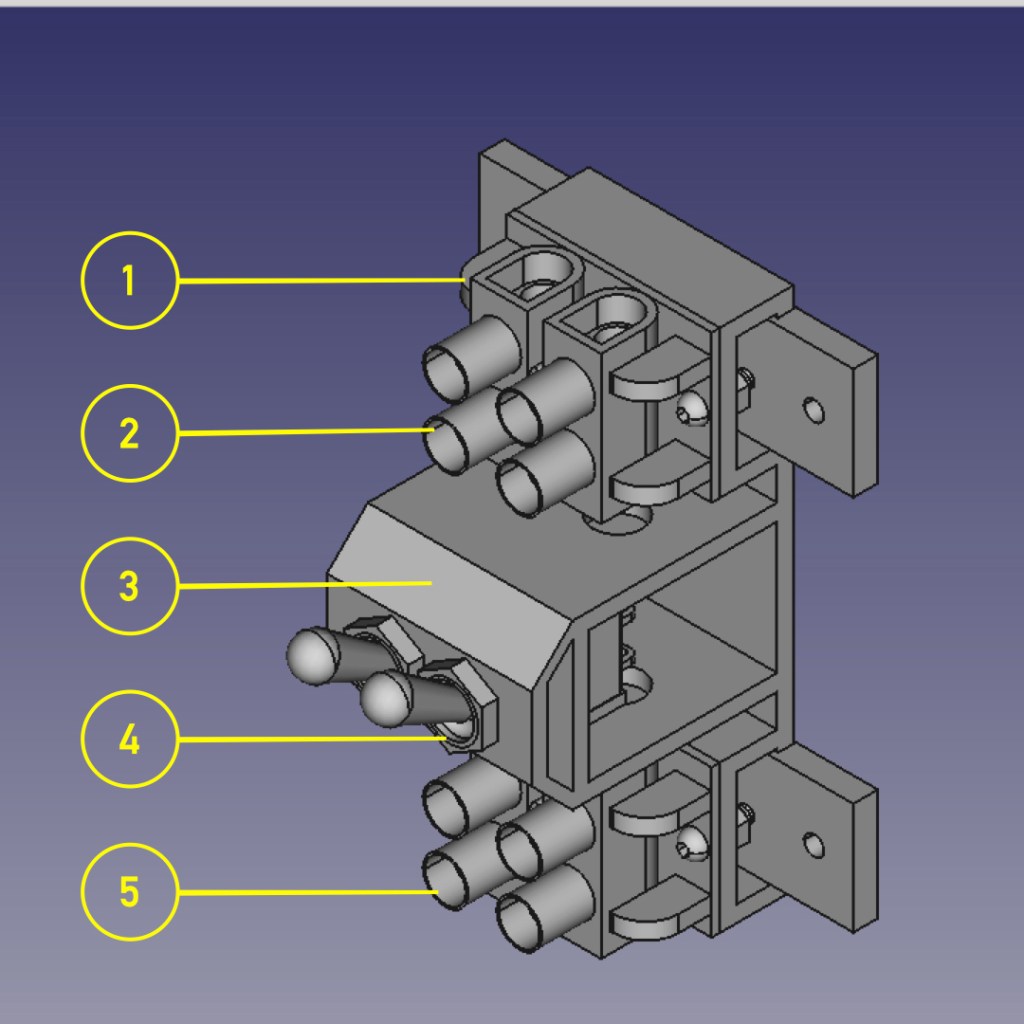
Screenshot 3 : Sectionneur – Aperçu 3/4 face
Screenshot 4 : Sectionneur – Aperçu 3/4 arrière
Présentation générale
Le sectionneur de l’armoire de distribution électrique permet d’isoler le réseau électrique desservi par l’armoire, de l’alimentation en énergie électrique.
Description détaillée
Screenshot 3
Guide de fixation des borniers de câblage
Bornier de câblage d’entrée réalisé à partir d’un domino électrique 230V 1,5mm2.
Structure de montage du sectionneur réalisée par impression 3D.
Deux interrupteurs à bascule comme sectionneur coupe circuit.
Bornier de câblage de sortie réalisé à partir d’un domino électrique 230V 1,5mm2.
Screenshot 4
Patte de fixation du module sectionneur sur la structure interne de l’armoire électrique.
Structure du module sectionneur réalisé par impression 3D.
Perforation pour faciliter le montage des borniers de câblage.
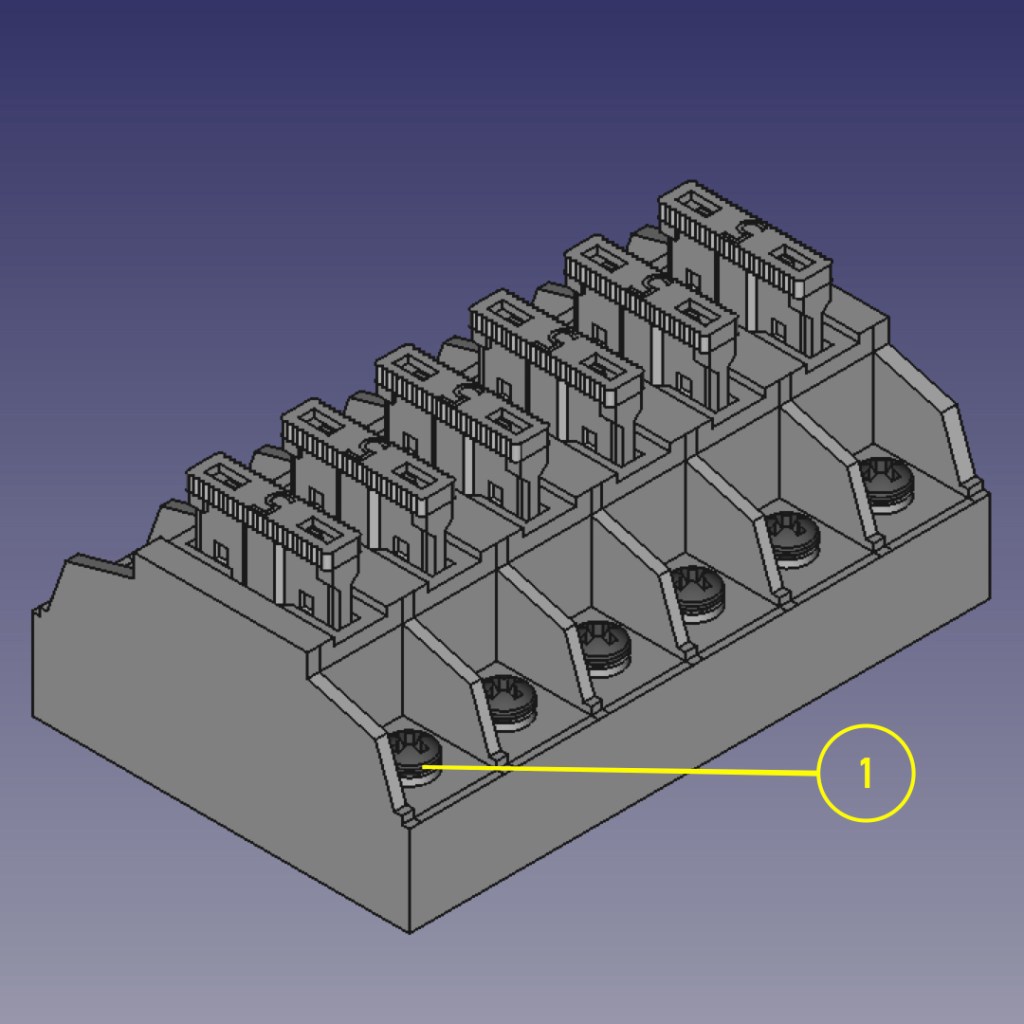
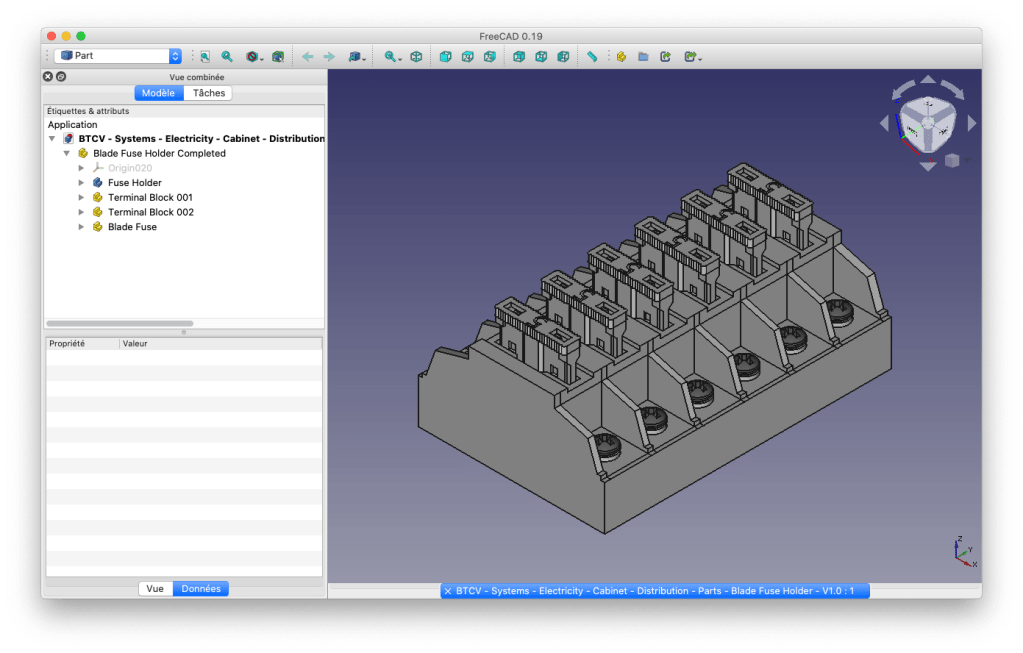
Modélisation 3D du porte fusible des armoires électriques du diorama
Screenshot 5 : Porte fusible – Aperçu 3/4 face
Screenshot 6 : Porte fusible – Aperçu 3/4 face
Présentation générale
Les fusibles protègent les circuits électriques contre les surintensités. Pour protéger les 6 circuits de sorties de l’armoire de distribution, 6 portes fusibles sont donc nécessaires. Cependant, pour des raisons d’encombrement de ces portes fusibles et pour s’assurer que le câblage associé soit simple, la solution retenue repose sur un porte fusible intégré de 6 fusibles plats.
Description détaillée
Screenshot 5
Borniers de câblage des bornes positives des circuits.
Fusibles plats.
Screenshot 6
Borniers de câblage des bornes négatives des circuits.
Modélisation 3D des composants de l’armoire électrique avec FreeCAD
Dans cette phase de conception préliminaire, seul le design général de la structure mécanique de la console de commande est modélisé. L’assemblage des différentes sous-parties n’est pas pris en compte ici. Il s’agit avant tout de valider la faisabilité technique de ce design ainsi que son intégration à l’échelle 1/12. Les détails de l’assemblage des différents sous-ensembles se fera lors de la réalisation du premier prototype.
Un aperçu de quelques designs complémentaires conçus spécifiquement pour les besoins du projet BATLab112.
GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
Ces modèles, téléchargés depuis la plateforme GrabCAD, sont utilisés dans cette phase de conception détaillée, afin de valider les assemblages mécaniques entre ces différents sous-ensembles.
Voir aussi
Des articles sur l’avancement du réseau de distribution électrique du diorama
Cet article présente la réalisation du modèle opérationnel de la plateforme rotative du diorama pédagogique de la Batcave, à l’échelle 1/12, du projet BATLab112.
La réalisation du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la réalisation du prototype de cet équipement. Voir l’article …
L’intégration du modèle opérationnel de la plateforme rotative du diorama de la Batcave fait suite à la l’intégration du pont élévateur. Voir l’article …
Ce modèle opérationnel de la plateforme rotative de la Batmobile est réalisé à partir du prototype. Le plateau de la plateforme est repris et peint. La transmission mécanique de la rotation est modifiée pour s’adapter sur le pont élévateur.
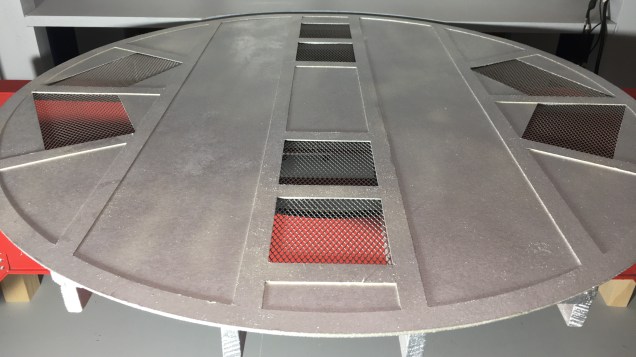
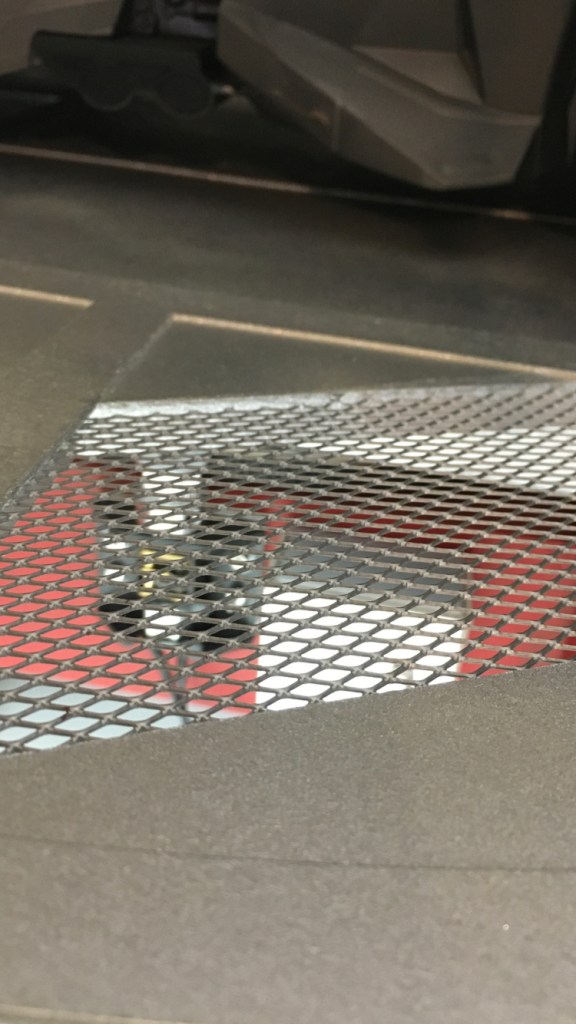
La structure en bois de la première version de la plateforme rotative a été reprise et poncée pour présenter deux surfaces parfaitement planes et être ensuite peintes (Photo N°1). Un nouveau plateau de la plateforme a été réalisé puis peint aussi de couleur gris métallique pour un rendu plus réaliste. L’assemblage de ce plateau sur le roulement à bille de transmission de la rotation est réalisé par quatre pions de positionnements (Photo N°2). Les ouïes du plateau ont été équipées de grilles collées par dessous (Photos N°3 & 4).
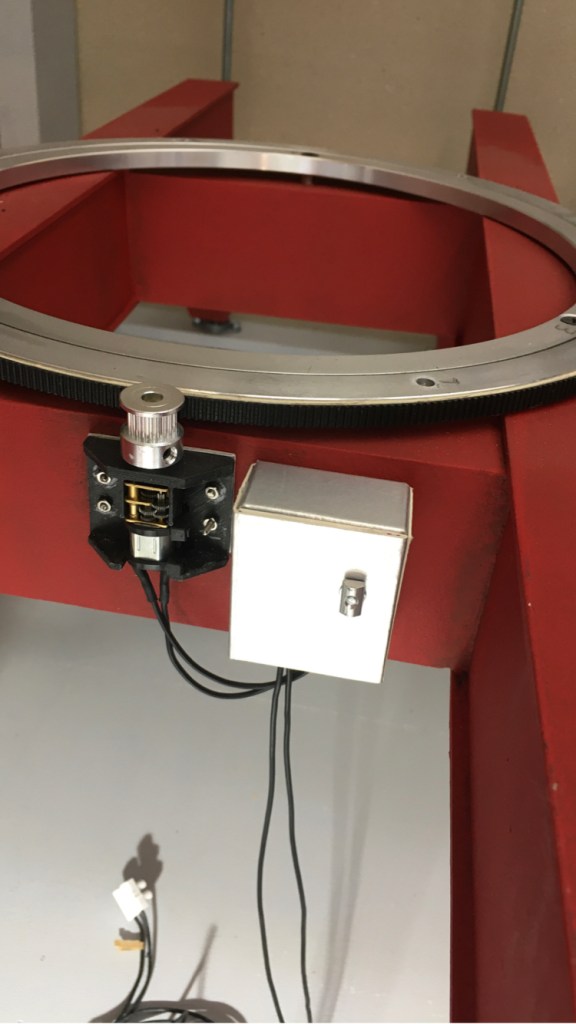
La motorisation et la transmission ont été particulièrement améliorées. Le design de la pièce de fixation du moteur a été modifié. Une armoire de câblage électrique permet de brancher ou débrancher l’alimentation électrique du moteur, en respect avec un principe de câblage réaliste. La courroie crantée a été fixée définitivement sur le roulement à bille de type Lazy-Susan (Photo N°1). Un nouveau test des commandes électroniques a été réalisé avec succès (Photo N°2). L’ensemble du moteur et l’armoire de câblage présentent un rendu réaliste satisfaisant (Photo N°3 & 4).
Validation fonctionnelle
Les vidéos suivantes montrent le bon fonctionnement de la plateforme rotative. La première vidéo est un test fonctionnel réalisé avec le prototypage de l’électronique de commande. La deuxième vidéo est un test fonctionnel réalisé avec le prototype du pupitre de commande V1.
Conclusion
Le design de ce modèle opérationnel de la plateforme rotative est satisfaisant. Les principes d’assemblages des différents sous-ensembles restent sommaires et seront améliorés ultérieurement pour présenter un niveau de réalisme plus en adéquation avec les objectifs pédagogiques du projet. L’électronique de commande ainsi que la gestion de l’affichage des commandes et leur l’horodatage par les carte Arduino sont opérationnels. Il reste à réaliser et valider la programmation des commandes automatiques.