Cet article présente la première partie de la conception et du prototypage de l’électronique de commande du pont élévateur, du diorama de la Batcave à l’échelle 1/12, du projet BATLab112.
Introduction
Cet article fait suite à la conception détaillée mécanique et la réalisation des quatre prototypes de la plateforme de motorisation des axes du pont élévateur. Cet article présente la conception détaillée de l’électronique de commande qui va contrôler les mouvements du pont élévateur en pilotant les moteurs des plateformes.
Pour plus d’infos :

Cahier des charges

Le cahier des charges de l’électronique de commande est conforme au cahier des charges général du projet BATLab112 présenté dans l’article ci-dessus. La vidéo associée est la mise à jour de l’illustration de ce cahier des charges initial, intégrant l’avancement de la conception 3D des différents composants du diorama.
L’électronique doit permettre de commander le pont élévateur par la mise en oeuvre des fonctions suivantes :
- Commander le sens de déplacement à la verticale du pont élévateur en fonction des actions sur les commandes manuelles.
- Maintenir une vitesse constante lors du déplacement à la verticale du pont élévateur pour maintenir l’horizontalité du pont élévateur lors de son déplacement à la verticale.
- Détecter les positions haute et basse du pont élévateur pour interdire le déplacement au-delà de ces positions.
- Détecter un défaut de rotation d’un des moteurs pour anticiper un éventuel défaut d’horizontalité.
- Transmettre des informations sur l’état du système : Position des commandes manuelles, vitesse de rotation des moteurs, défauts …
L’ensemble des fonctions décrites dans le cahier des charges doit être entièrement compatibles avec un raccordement du pont élévateur sur un modèle de console de commande déjà mise en oeuvre dans le diorama pour piloter la plateforme rotative et le pont roulant.
Pour plus d’infos :


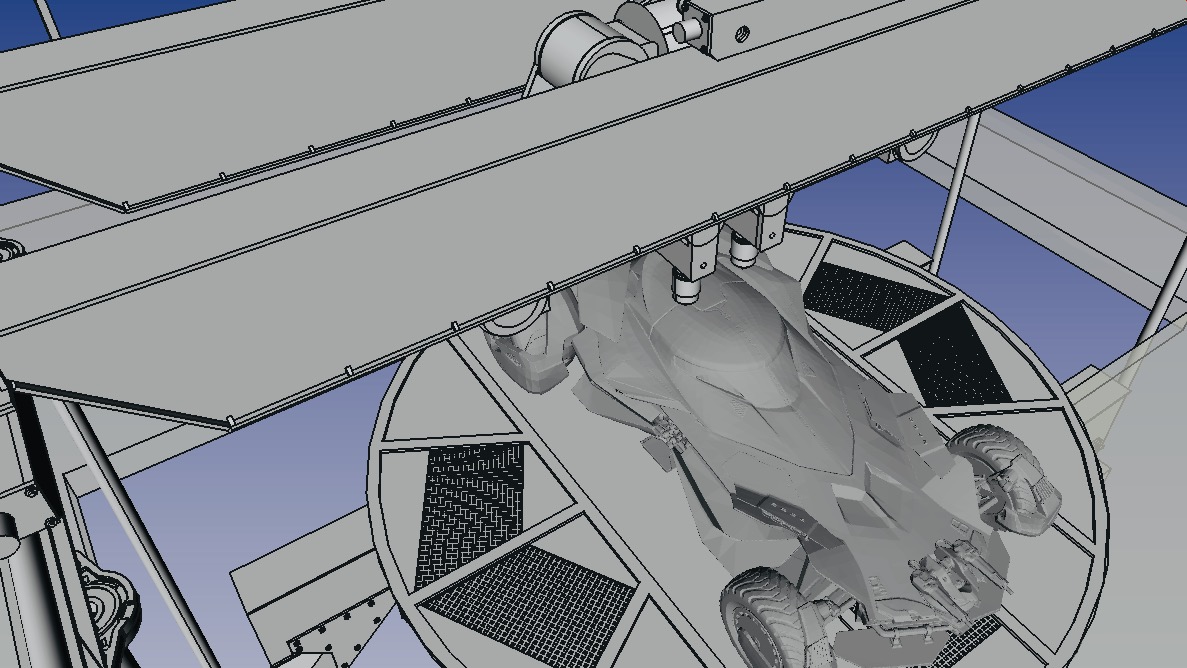
Principe de fonctionnement général
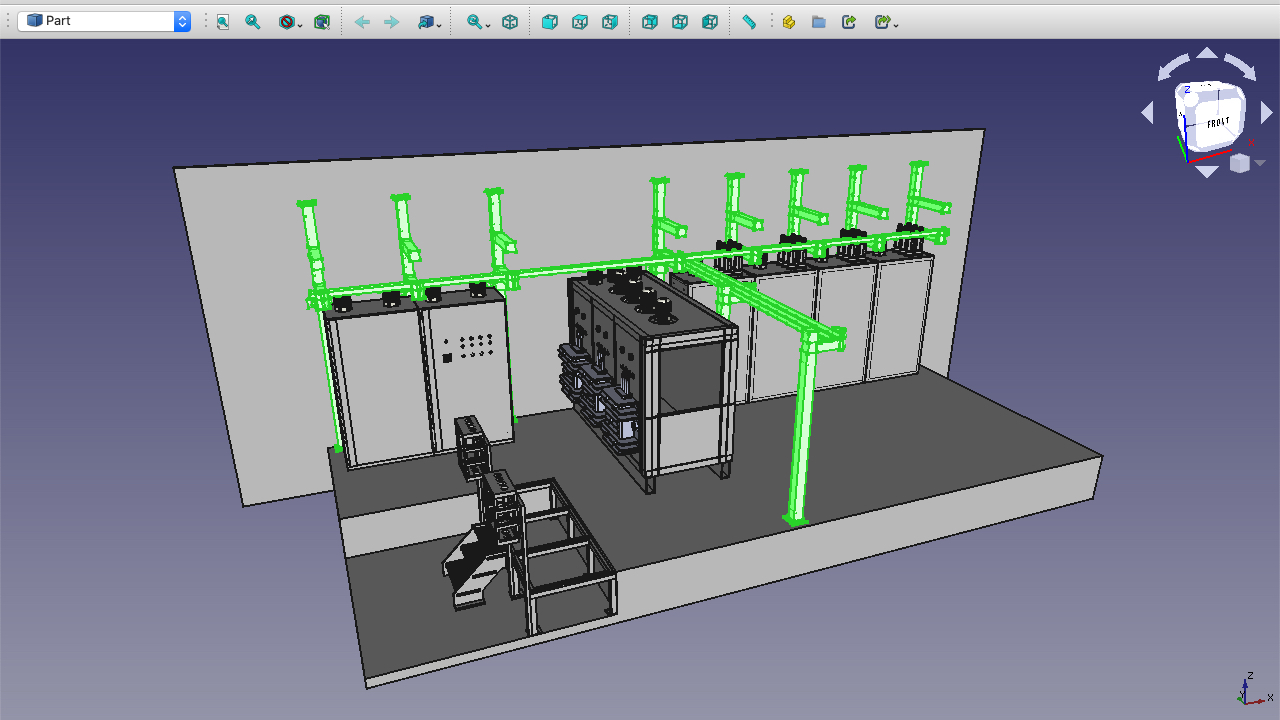
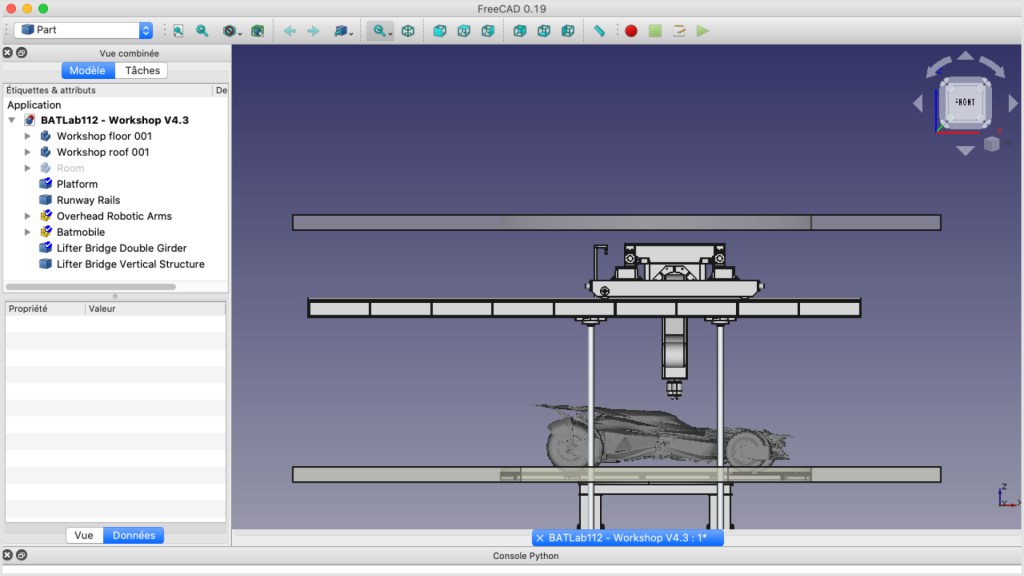
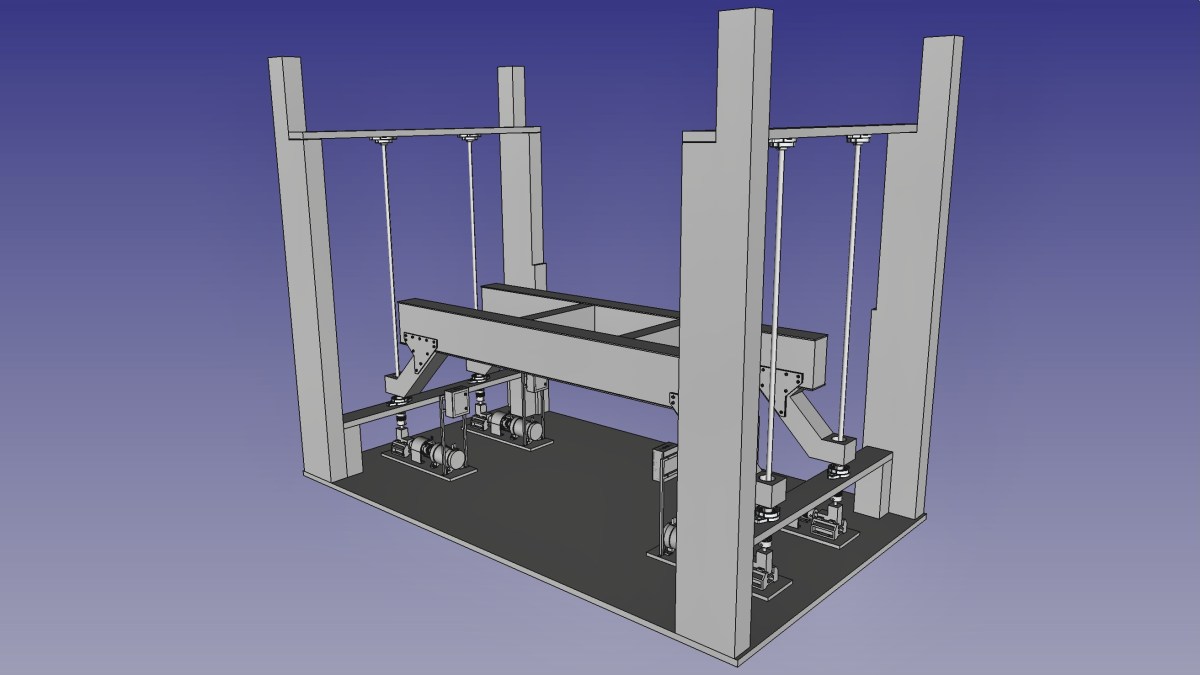
Le mouvement vertical du pont élévateur est assuré par les 4 plateformes de motorisation des 4 axes verticaux. Le principe est très simple la rotation des moteurs entraine la rotation des 4 axes. Ces axes sont des vis sans fin, sur lesquelles est fixé le pont élévateur. La rotation de ces vis sans fin entraine le déplacement verticale du pont.

La console de commande regroupe l’ensemble des commandes manuelles et automatiques pour contrôler la vitesse et le sens de rotation des moteurs, mais aussi les écrans d’affichage de ces informations. La conception de la console de commande a déjà donné lieu à la réalisation de deux modèles opérationnels mis en œuvre pour commander la plate-forme rotative et le pont roulant bipoutre.

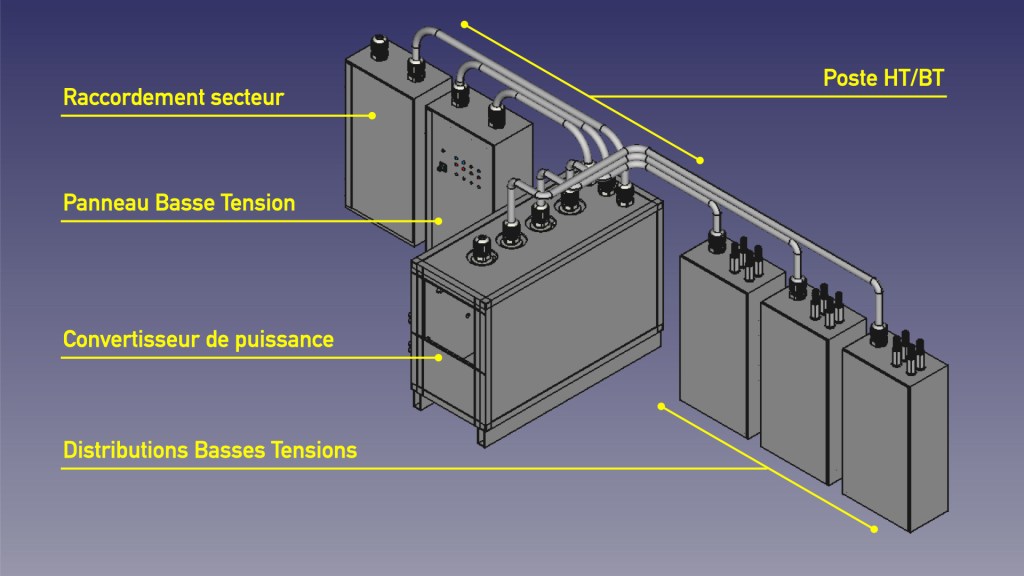
Deux armoires électriques regroupent l’ensemble des composants, des circuits électriques et électroniques nécessaires pour transmettre et convertir les signaux électriques.
Les signaux de commandes issues de la console de commandes sont transmises à une armoire électrique dans laquelle se trouvent deux PCB de type : Double Pont en H à base de L298N. Ces PCB convertissent les signaux de commandes du sens de déplacement vertical du pont élévateur, portés par des tensions de 5VDC, en signaux de tension 12VDC, compatibles avec l’alimentation électrique des moteurs.
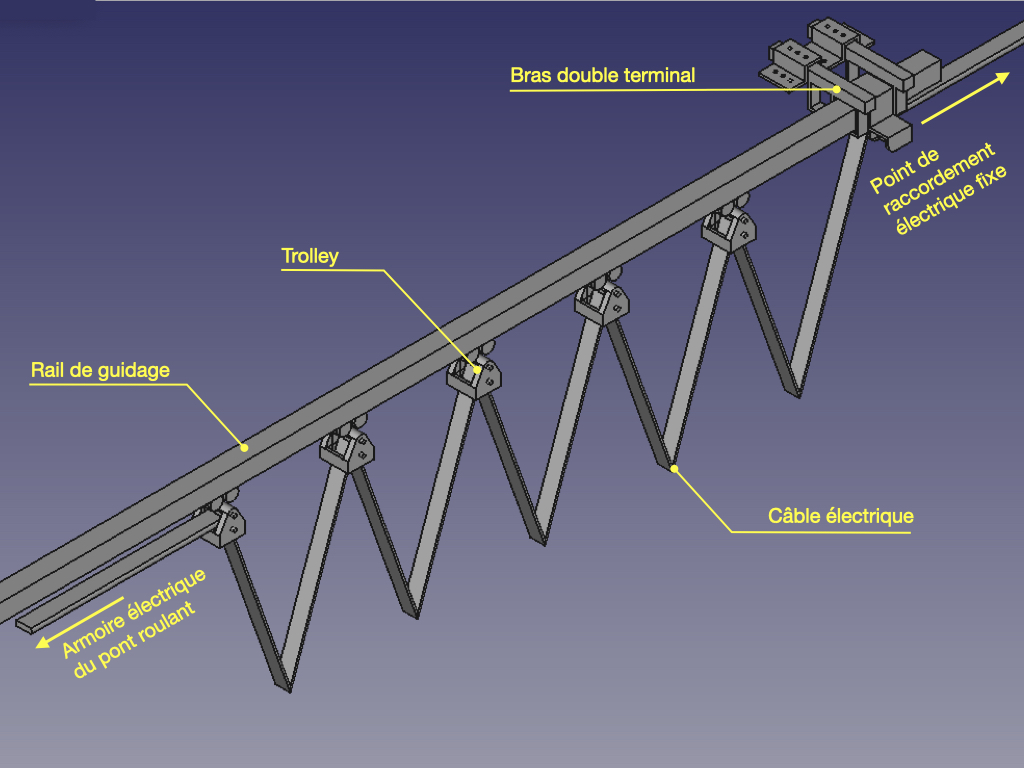
Les plateformes de motorisation des axes du pont élévateur sont connectées, d’une part à l’armoire de contrôle des moteurs, et d’autre part, à une deuxième armoire électrique dans laquelle se trouvent 4 PCB de type convertisseur de fréquence en tension. Ces PCB transforment les signaux électriques en fréquence, issus des photocoupleurs des capteurs de vitesse de rotation présents sur chacune des plateformes, en signaux électriques en tension, compatibles avec les broches d’entrées de l’Arduino en charge de l’affichage de ces informations sur les écrans de la console de commande.

Schéma électronique
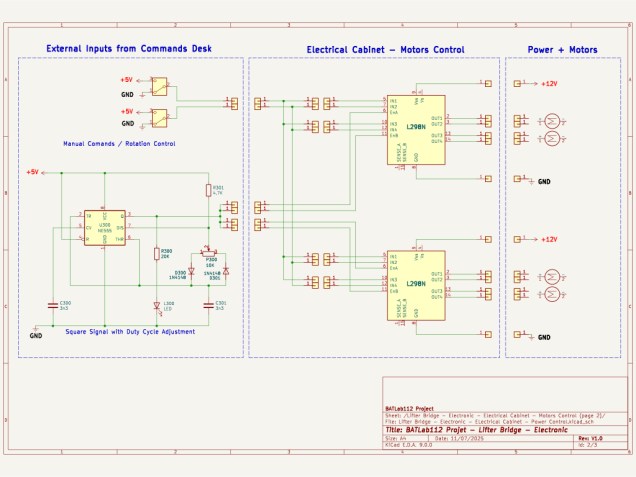

Le schéma du montage électronique se partage en deux parties. La première partie correspond au circuit de contrôle de la vitesse et du sens de rotation des moteurs. La deuxième partie correspond au circuit de conversion des signaux électriques issus des capteurs photocoupleurs de mesure de la vitesse de rotation des moteurs.
Contrôle de la vitesse et du sens de rotation des moteurs

Au centre de ce schéma on retrouve les deux doubles pont en H à base de composants L298N. Chaque pont en H pilote 2 moteurs directement raccordés sur chacune de ses sorties.
Le signal carré à rapport cyclique variable est dirigé vers les entrées EnA et EnB des deux double pont en H pour garantir une vitesse de rotation des moteurs identiques.
+ d’infos : https://arduino.blaisepascal.fr/pont-en-h-l298n/

Comme mentionné au dessus, la variation de la vitesse de rotation des moteurs est commandée par un générateur de signal carré, à rapport cyclique variable. Ce montage est réalisé à partir d’un oscillateur NE555.
Dans ce montage la résistance R301 et le condensateur C301 fixe la valeur de la fréquence. Le potentiomètre P300 permet le réglage du rapport cyclique.

Les commandes manuelles ont été schématisées le plus simplement possibles ; Deux switches dont la combinaison de leurs positions donne la commande du sens de rotation.
| S2 | S1 | Moteur |
|---|---|---|
| 0 | 0 | Stop |
| 0 | 1 | Sens 1 |
| 1 | 0 | Sens 2 |
| 1 | 1 | Stop |
Le détails de ces commandes sera développé lors de la conception de la Console de commandes associée au pont élévateur.
Mesure de la vitesse de rotation des moteurs

Au centre de ce schéma, on retrouve quatre convertisseurs de fréquence en tension (Hz to V), MIKROE 2890. Ces convertisseurs transforment les signaux électriques en fréquence, issus des photocoupleurs des capteurs de vitesse de rotation, en signaux électriques en tension, compatibles avec les broches d’entrées de l’Arduino.
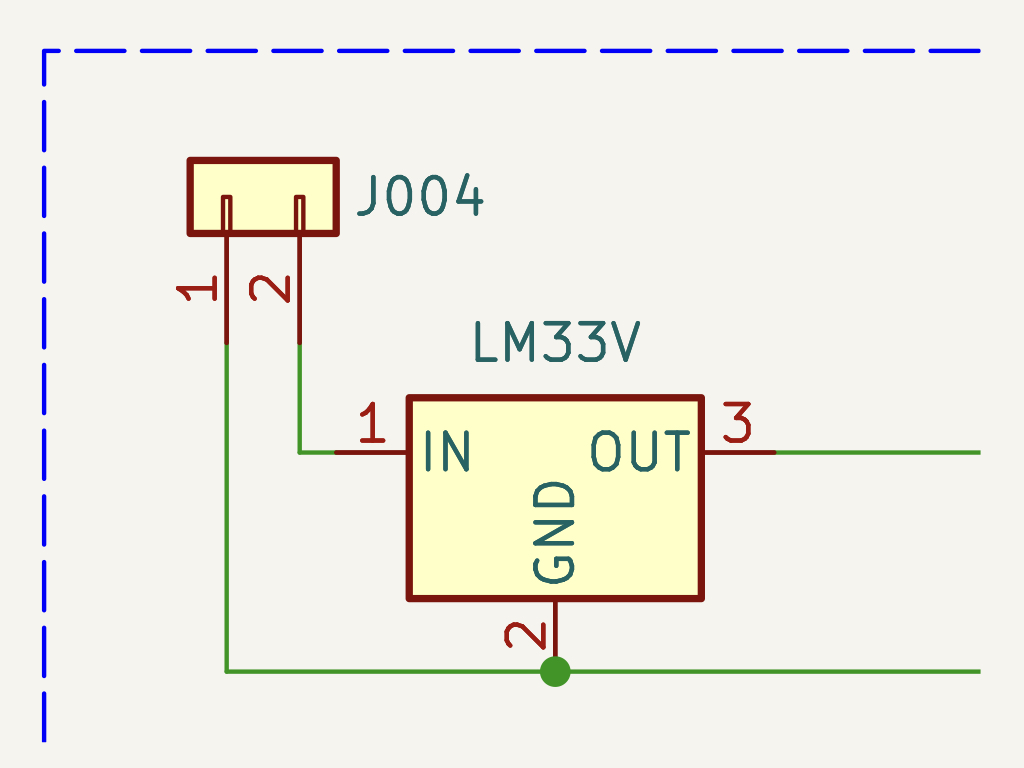
Le convertisseur Hz to V ayant besoin d’une tension d’alimentation électrique de 3,3V, un convertisseur Tension / Tension, LM33V assure la conversion de la tension d’alimentation électrique de 5VDC en 3,3VDC.
Edition des schémas électroniques

LEs schéma électriques et électroniques du diorama de la Batcave du projet BATLab112 sont édités avec la suite logicielle Open Source KiCad .
Sourcing
Le sourcing des composants principaux est réalisé dès la phase de conception pour intégrer la modélisation 3D de ces composants dans la conception détaillée des armoires électriques.
Le sourcing est réalisé à partir d’une plateforme de ventes en ligne. Ce choix est essentiellement dicté par un objectif de limitation du nombre de fournisseurs, mais aussi de centralisation des commandes et ainsi envisager des économies d’échelle, notamment sur les frais de livraison.
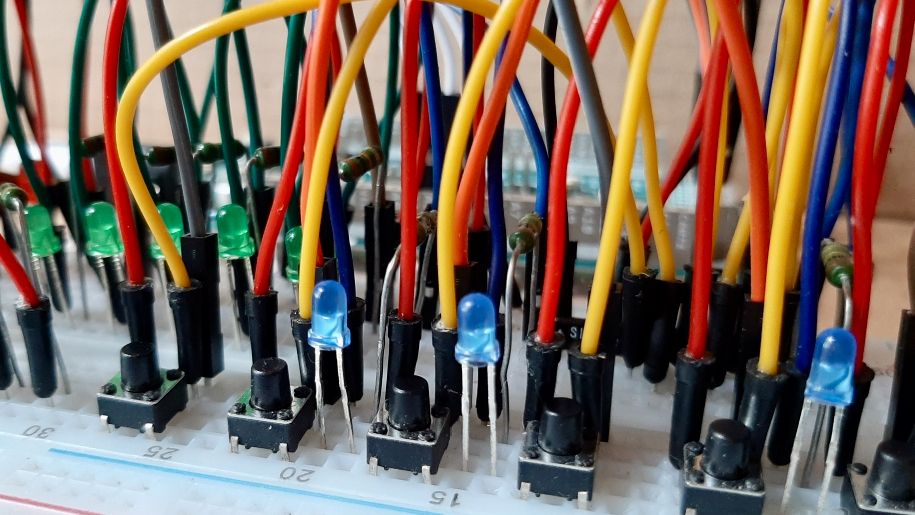
Sourcing câblage

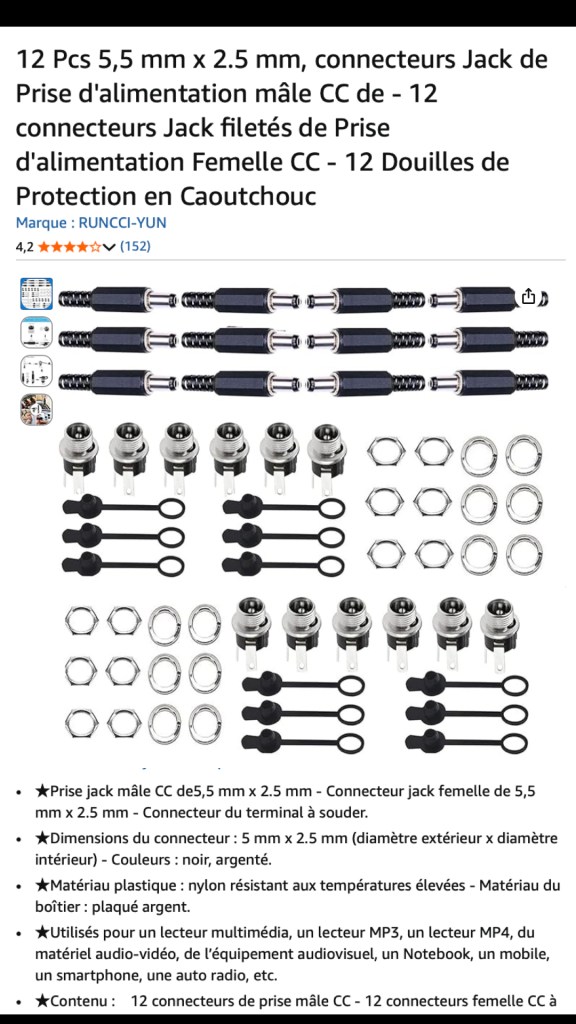


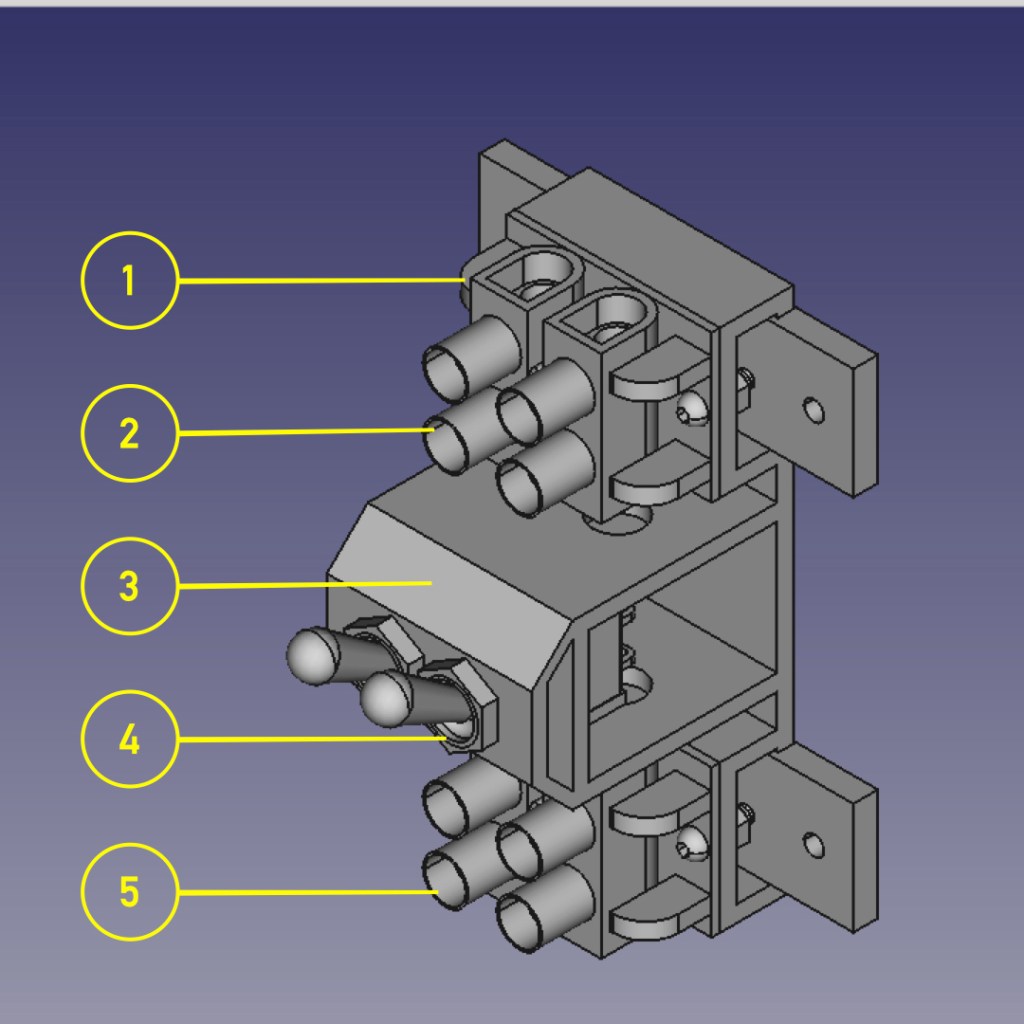
- Les prises Jack 3,5 mm sont utilisées en entrées/sorties pour connecter des câbles de très petites sections véhiculant des signaux de commandes de très faibles intensités.
- Les prises Jack 5,5 mm sont utilisées en sorties pour connecter des câbles de sections plus importantes pour alimenter des éléments tels que les moteurs à courant continu.
- Les borniers verts sont utilisés en entrées/sorties pour connecter des câbles de très petites sections véhiculant des signaux de commande en interne d’une armoire électrique.
- Les borniers bleus sont utilisés en entrées/sorties pour connecter des câbles de sections plus importantes véhiculant des tensions d’alimentation d’éléments tels que des moteurs.
- Les presse étoupes sont utilisé en entrées d’une armoire électrique pour connecter le câble d’alimentation général de l’armoire.
Sourcing des composants actifs

Le contrôle du sens et de la vitesse de rotation des moteurs à courant continu est assuré par une carte électronique de type Double pont en H équipée d’un composant L298N.
Une carte est capable de piloter deux moteurs simultanément, par conséquent, deux cartes de ce type sont nécessaires pour piloter les moteurs des quatre plateformes de motorisation des quatre axes du pont élévateur.

La mesure de la vitesse de rotation des moteurs est assuré par une carte électronique convertisseur fréquence / Tension. Ce PCB convertit les signaux en fréquence issus des capteurs des plateformes en signaux en tension compatible avec les micro-controlleurs Arduino des consoles de commandes.
Une carte est capable de convertir un signal en fréquence, par conséquent, quatre cartes de ce type sont nécessaires pour mesures les vitesse de rotation des moteurs des quatre plateformes des quatre axes du pont élévateur.
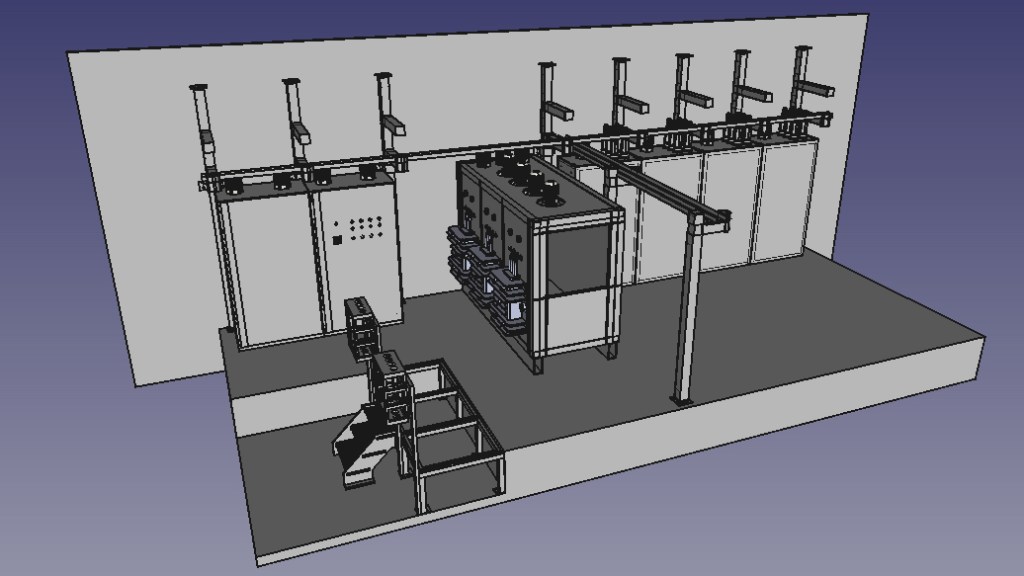
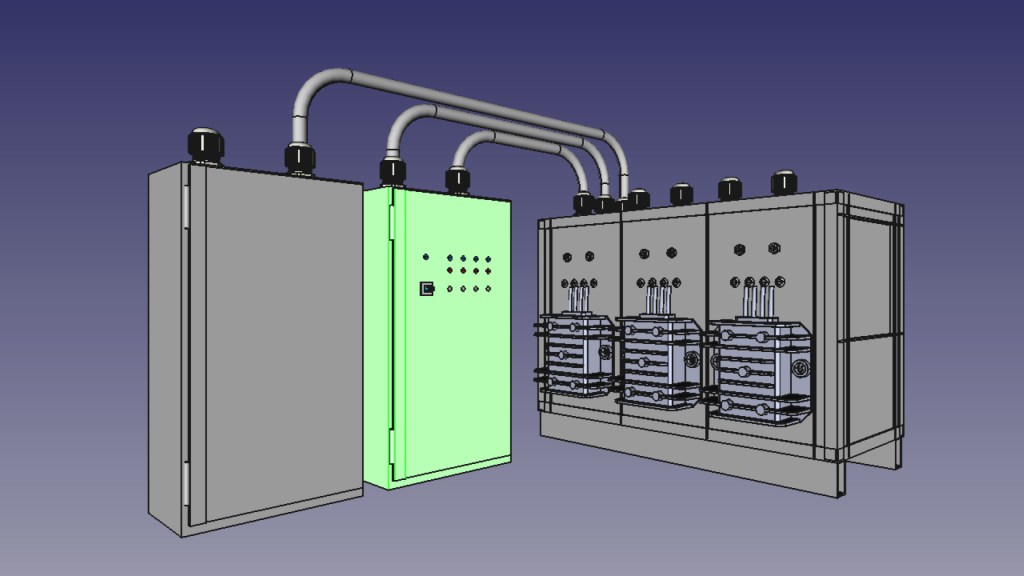
Modélisation 3D
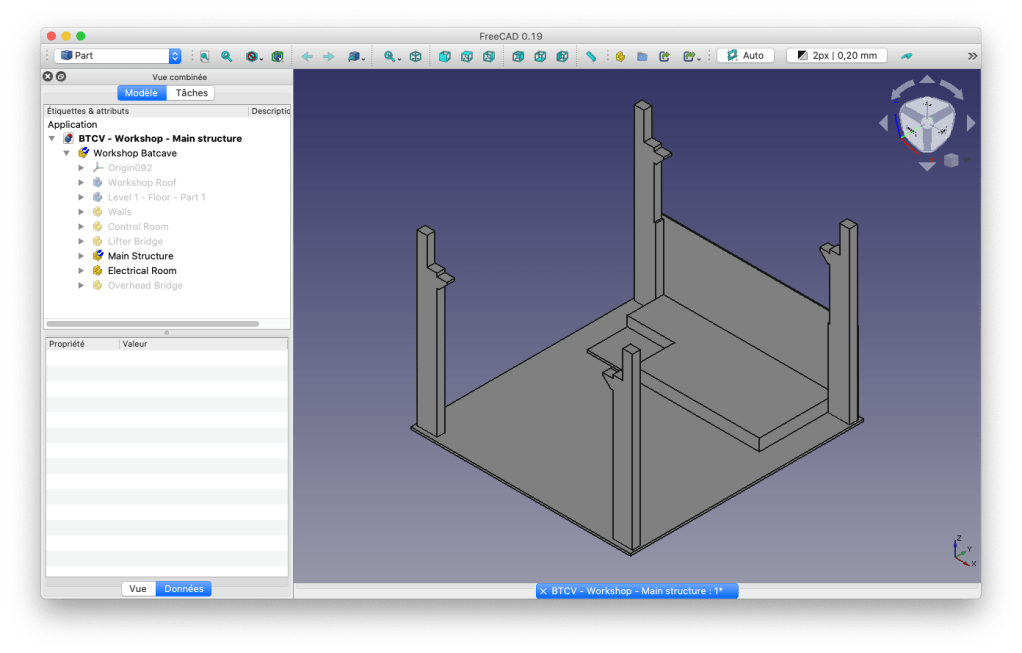
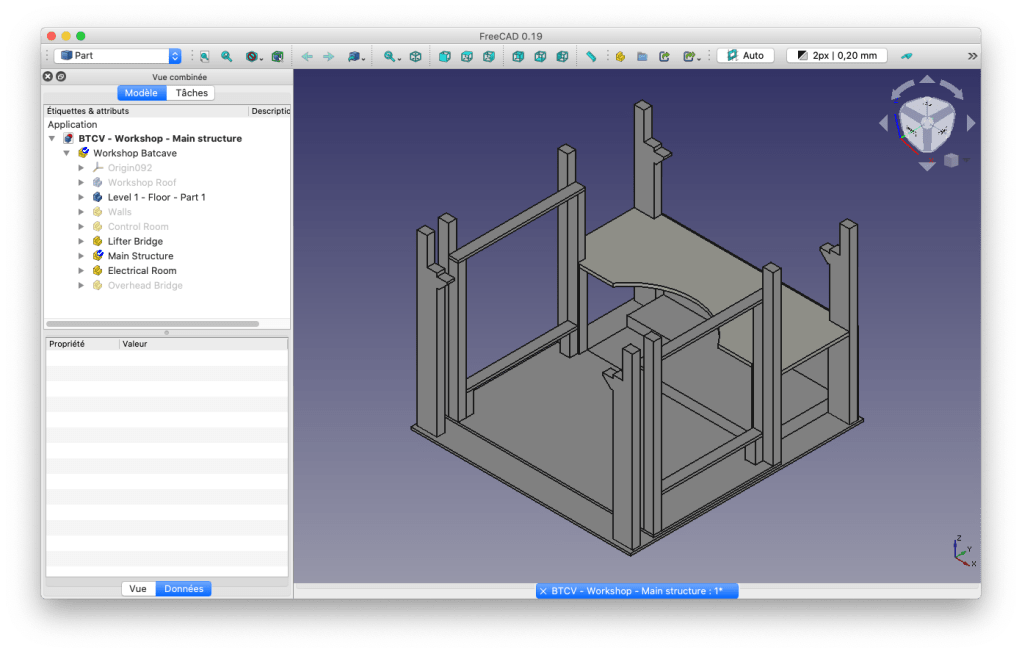
Conception 3D

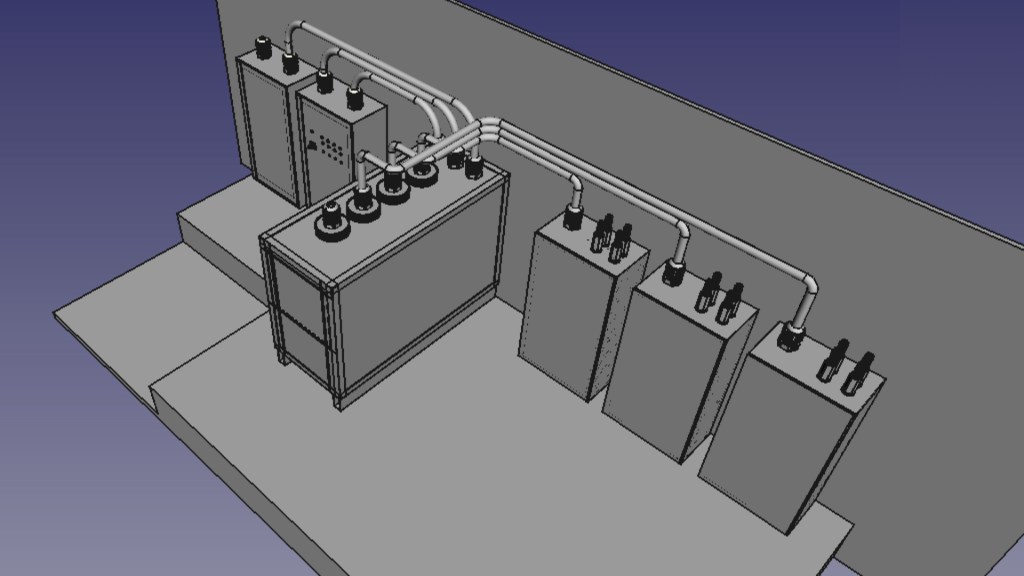
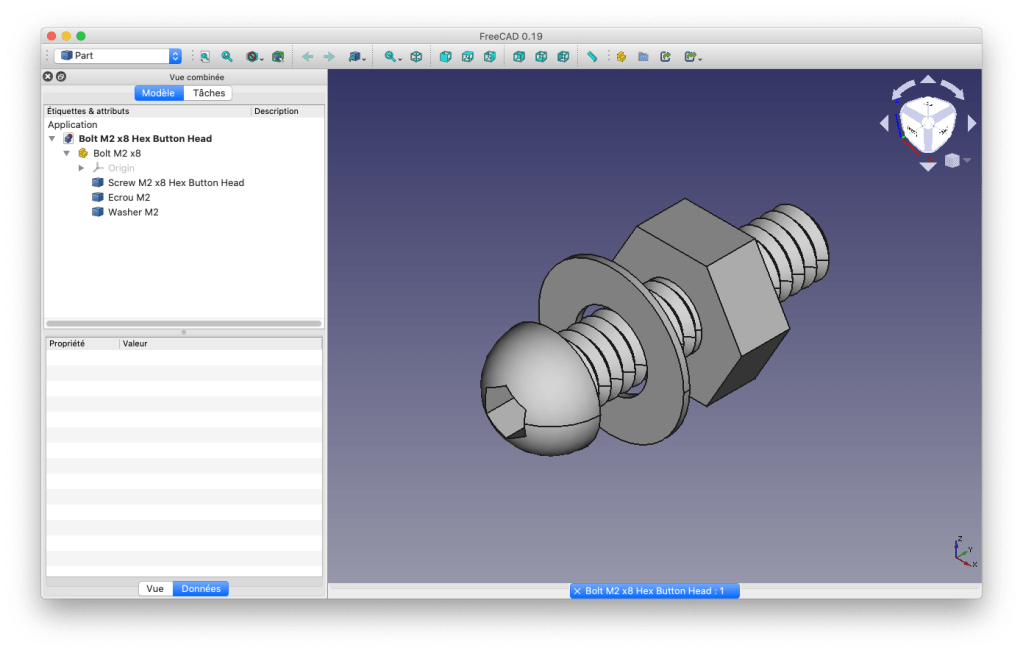
La modélisation du poste électrique équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Bibliothèque de modèles 3D

Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
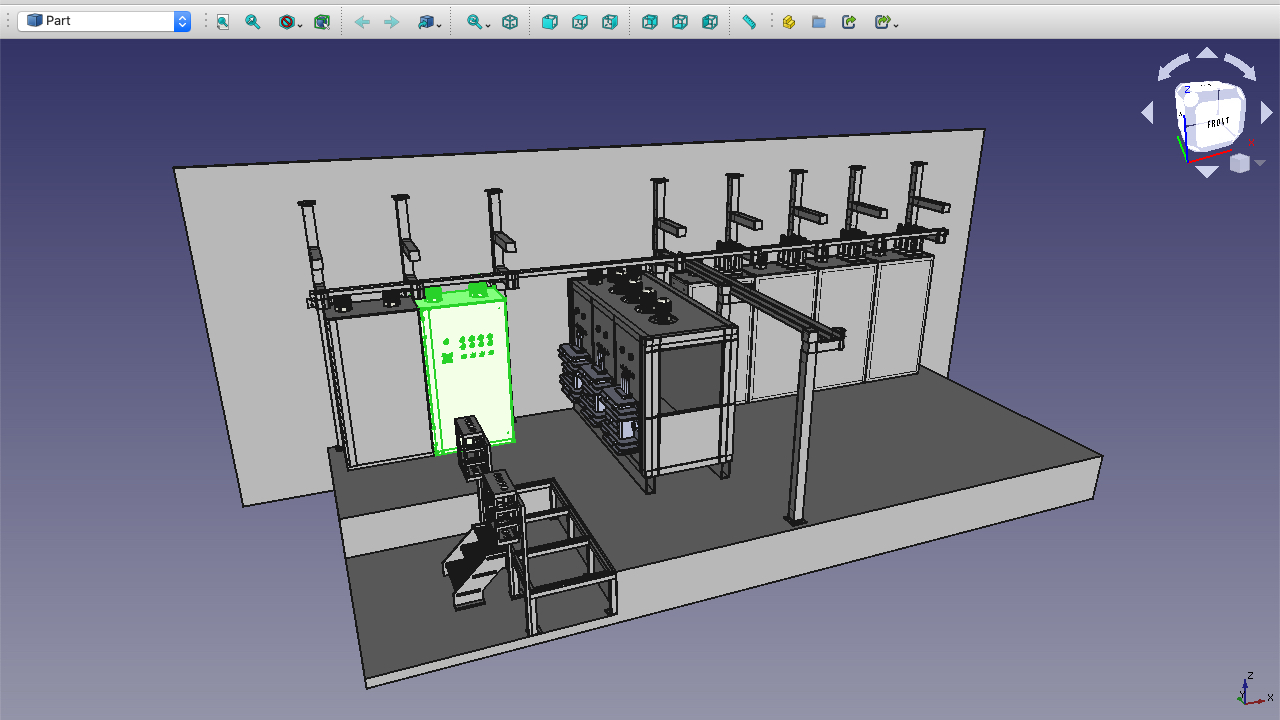
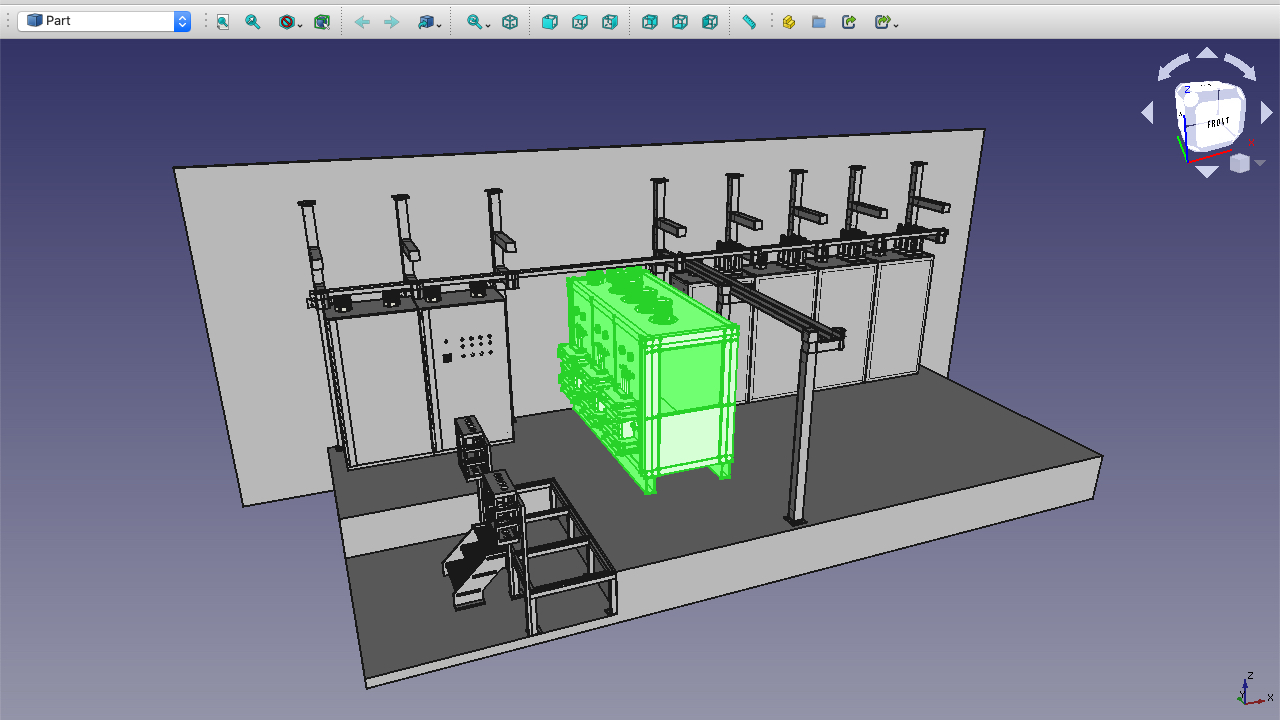
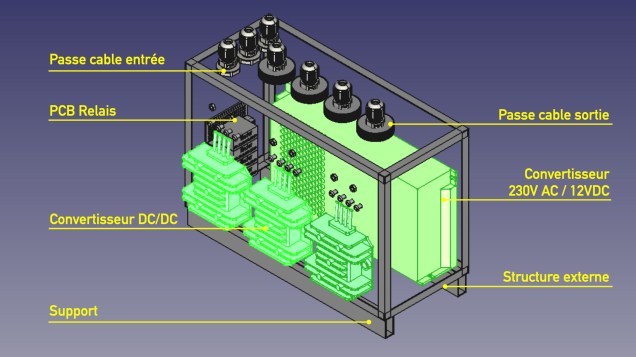
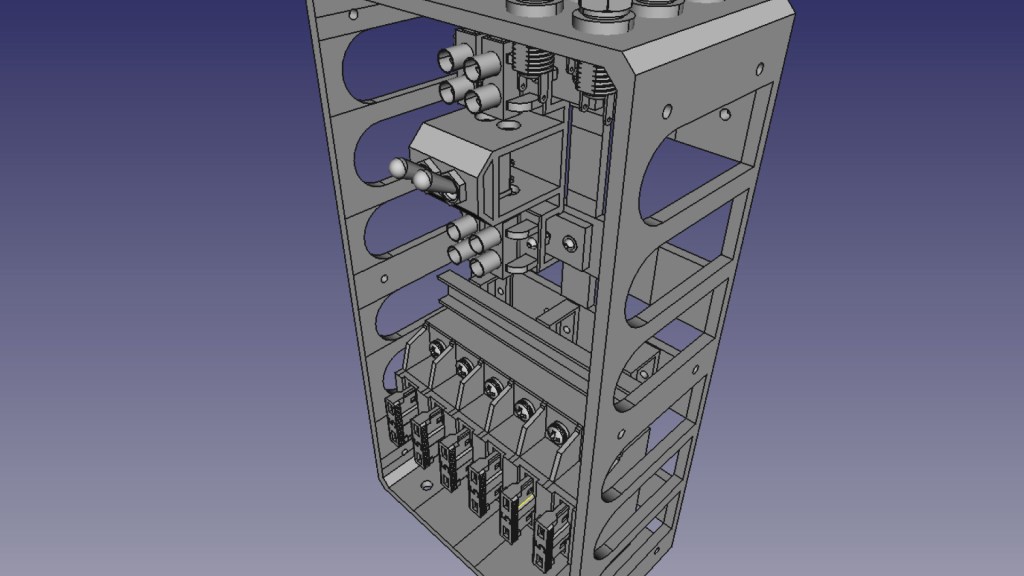
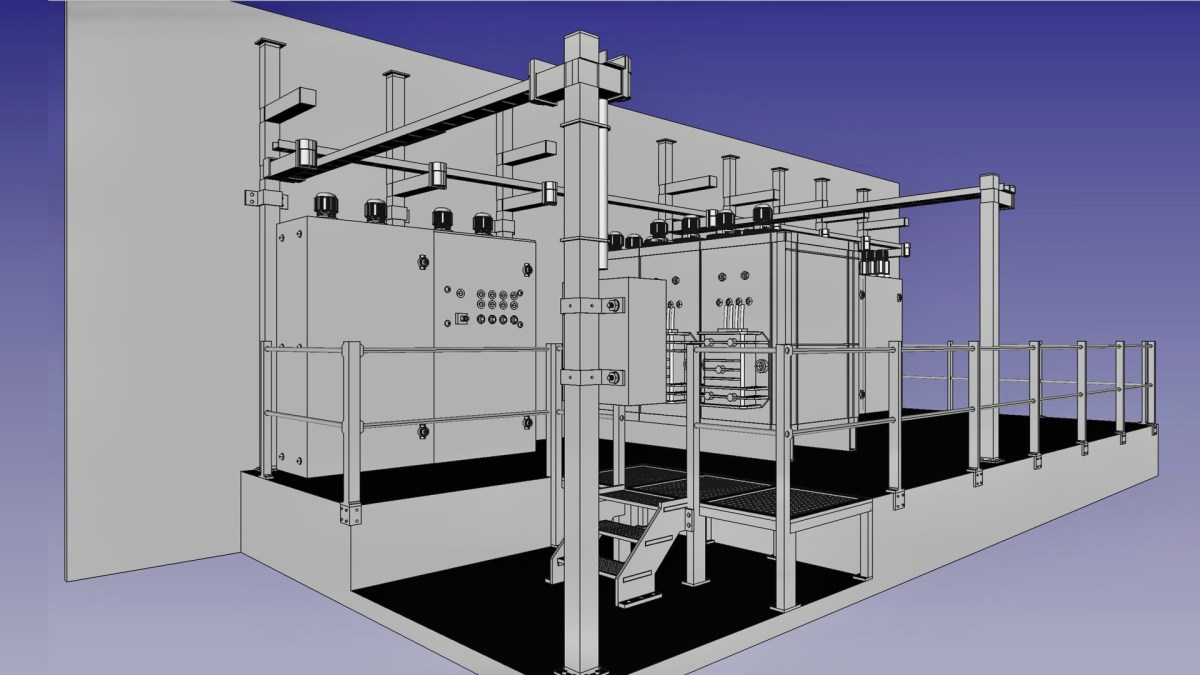
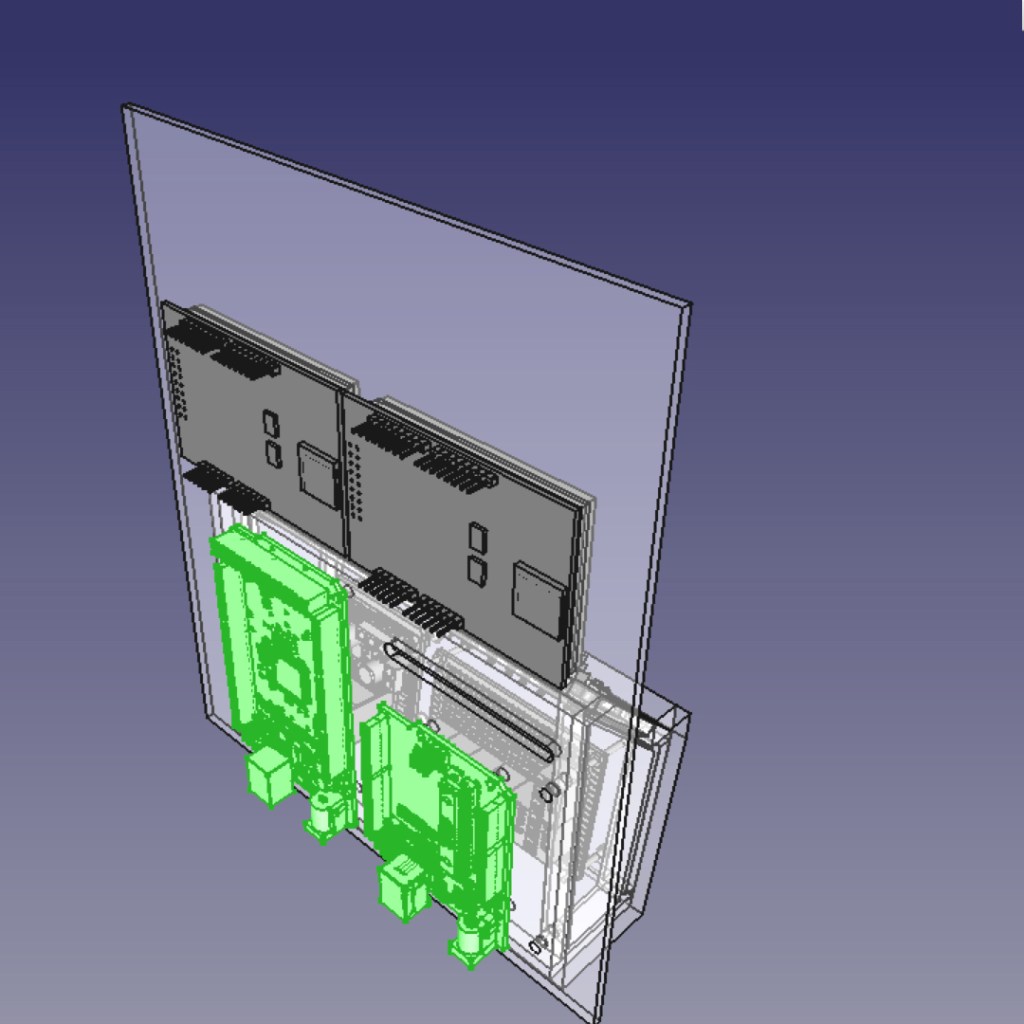
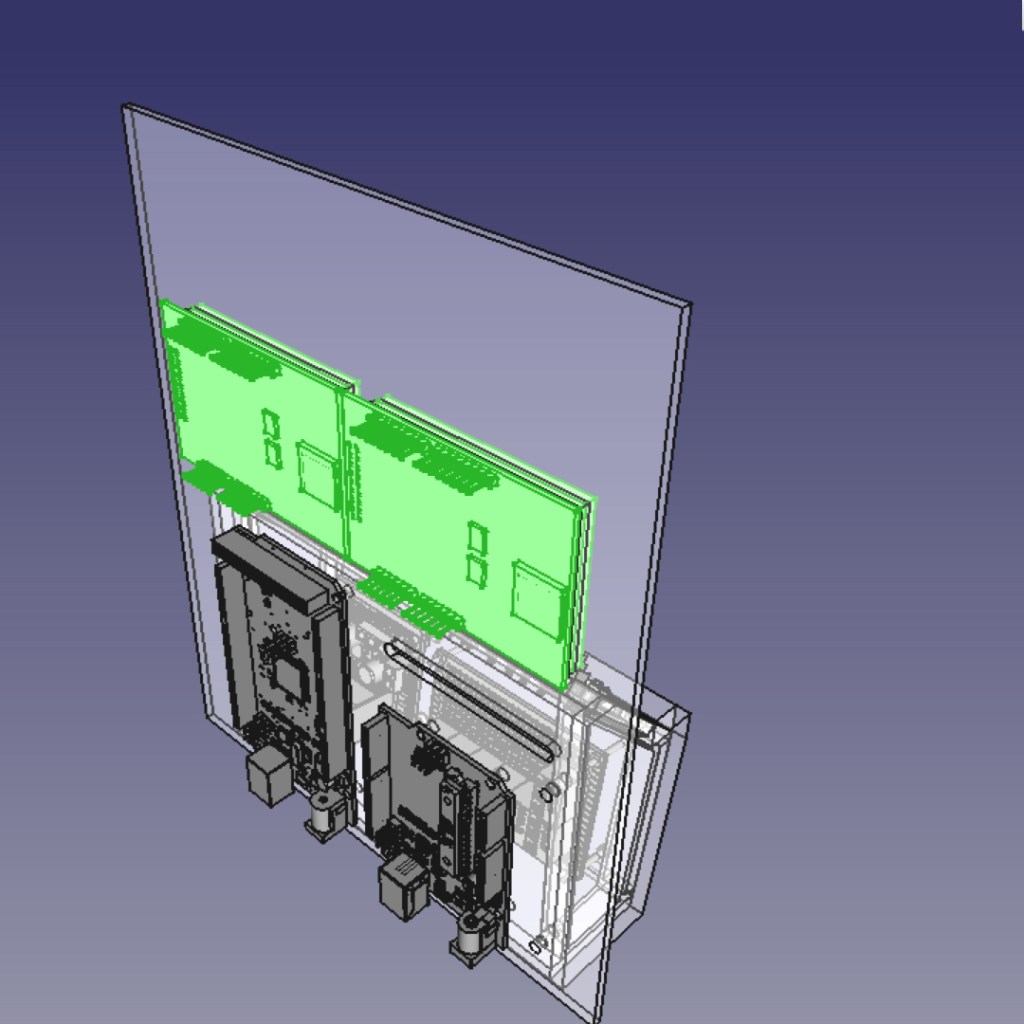
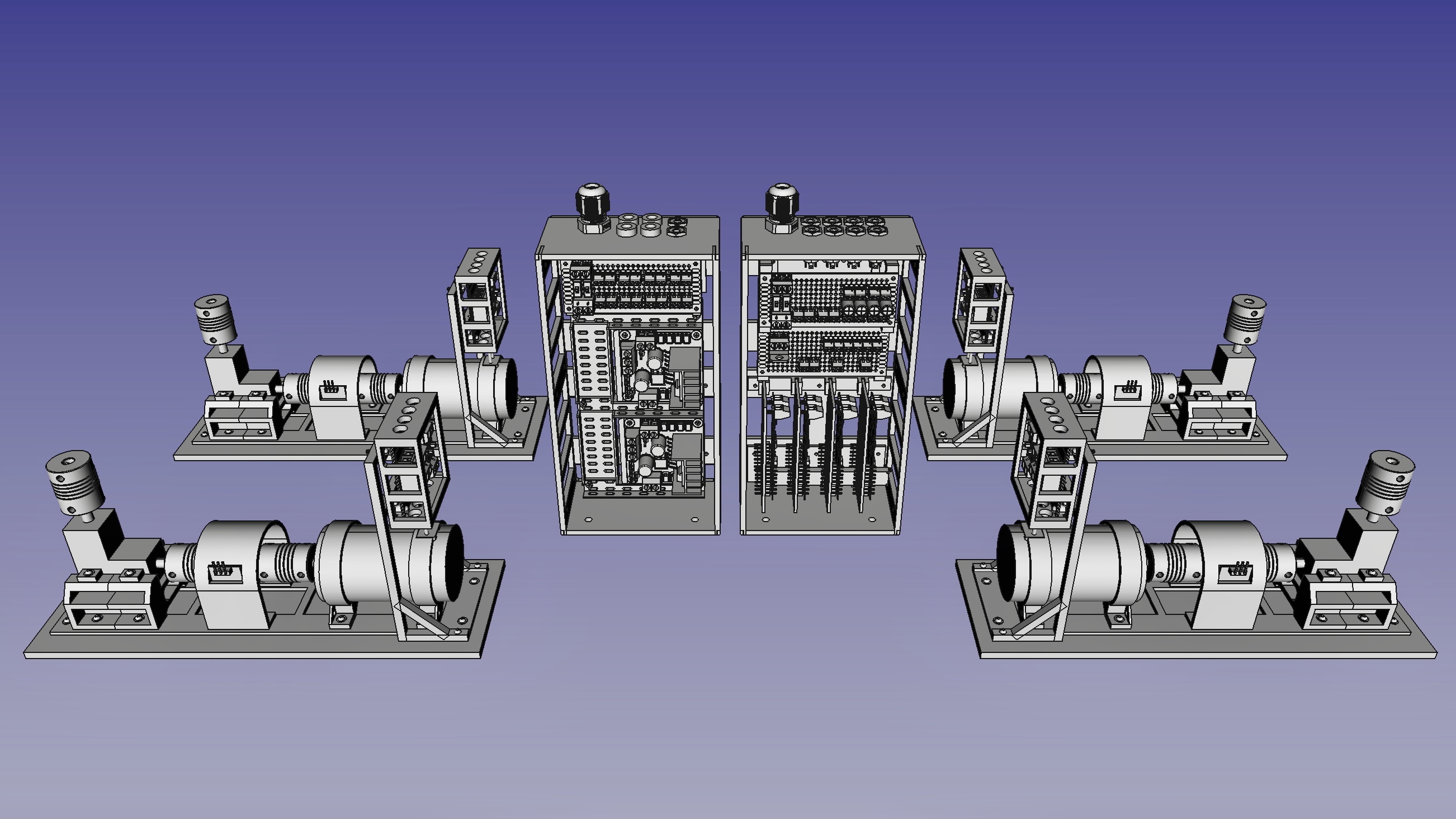
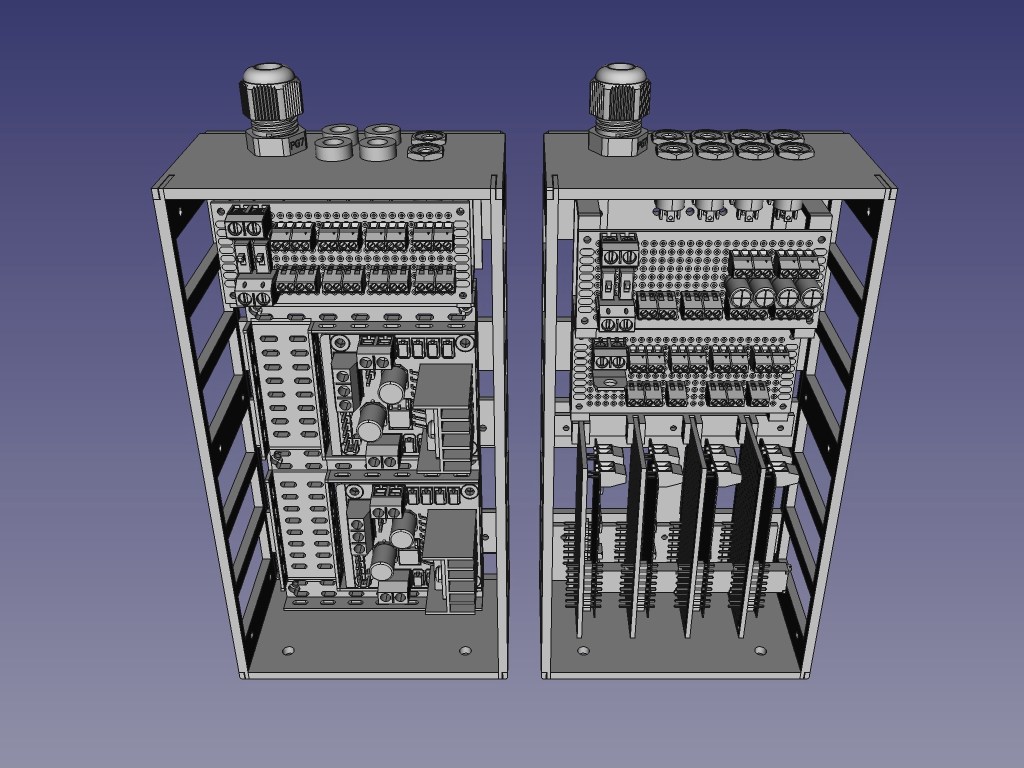
Intégration

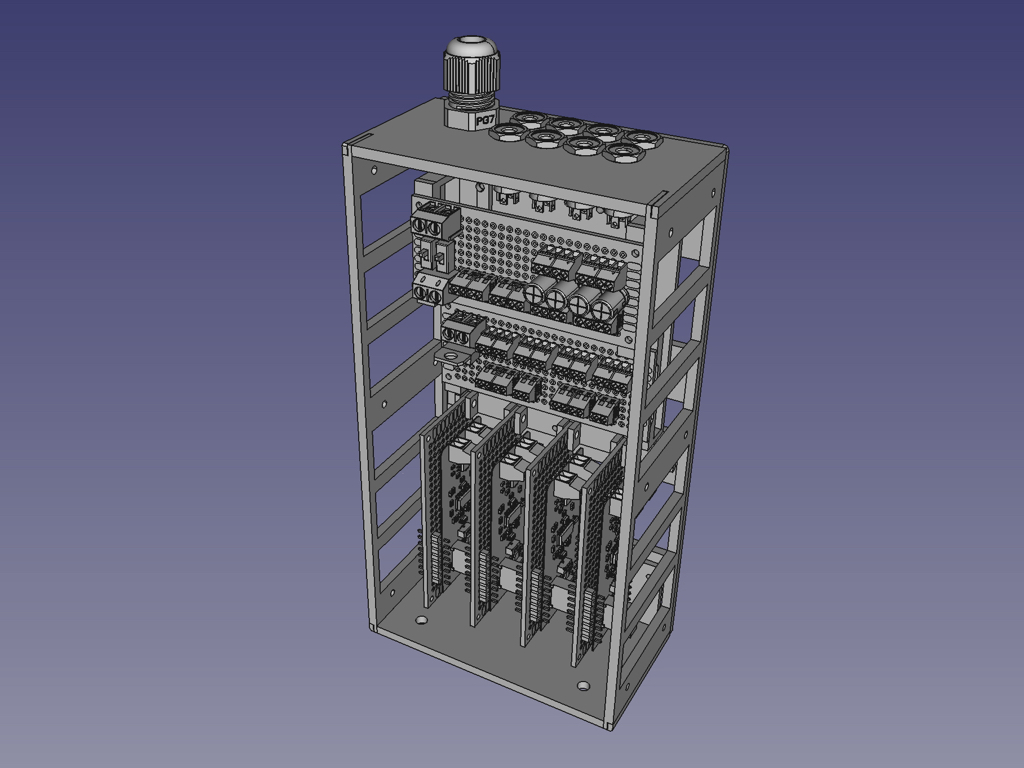
Tous les composants d’une même page de schéma sont regroupés dans une armoire électrique à l’échelle 1/12. On obtient ainsi, une première armoire électrique sur laquelle sont raccordés les moteurs électriques, les commandes manuelles et le signal carré de contrôle de la vitesse de rotation des moteurs, issus de la console de commandes. La deuxième armoire électrique est raccorder aux photocoupleurs des capteurs de mesure de la vitesse de rotation des moteurs et à la console de commande pour lui transmettre les signaux électriques correspondants aux vitesses de rotation.
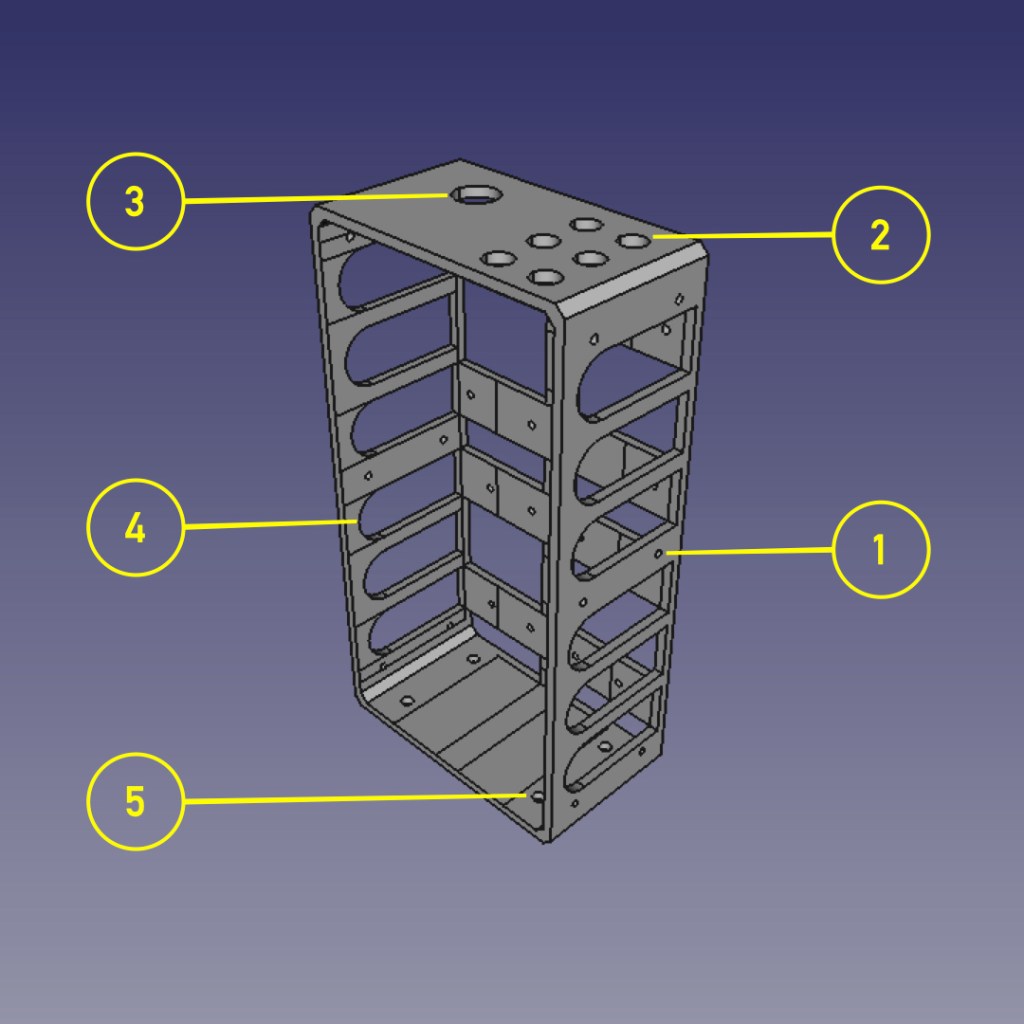
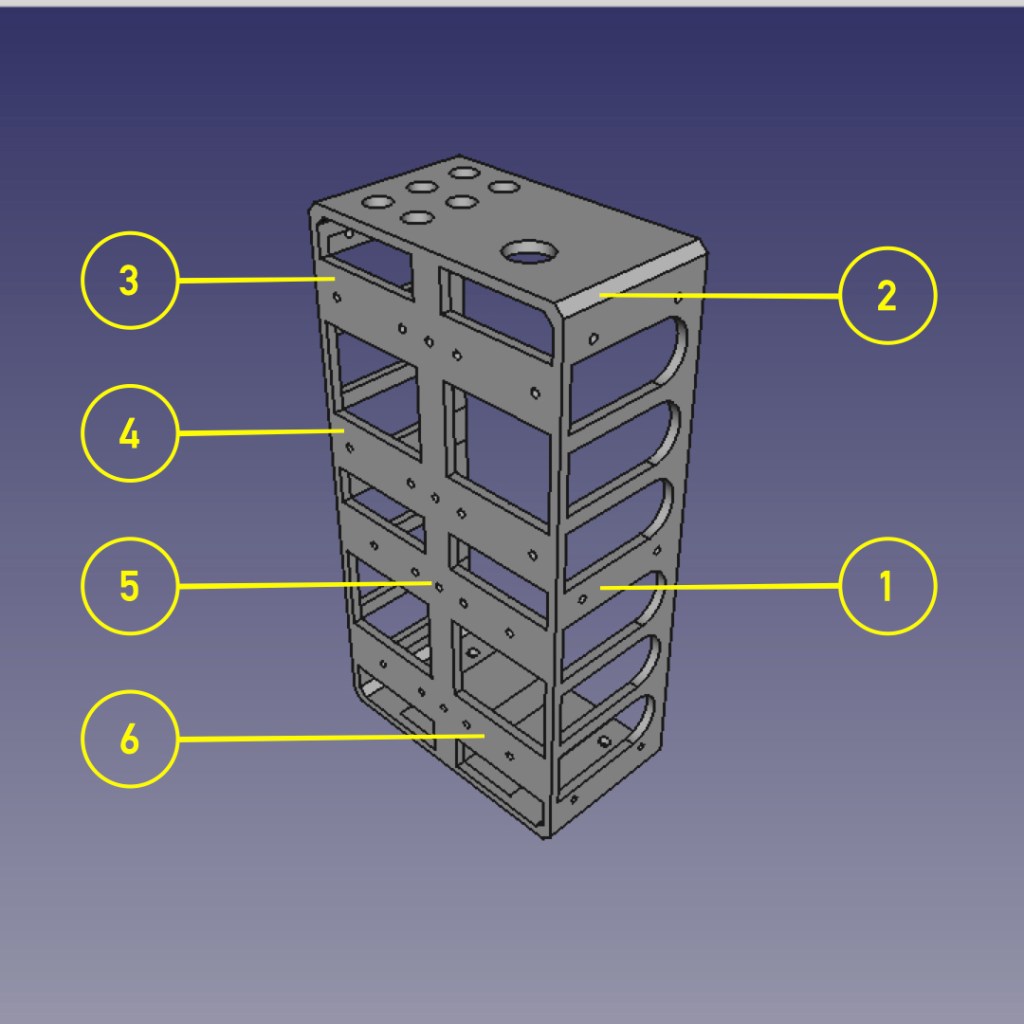
Cet article ne détaille pas la conception de la structure des armoires électriques. Cette conception a déjà fait l’objet d’un article spécifique.
Pour plus d’infos :

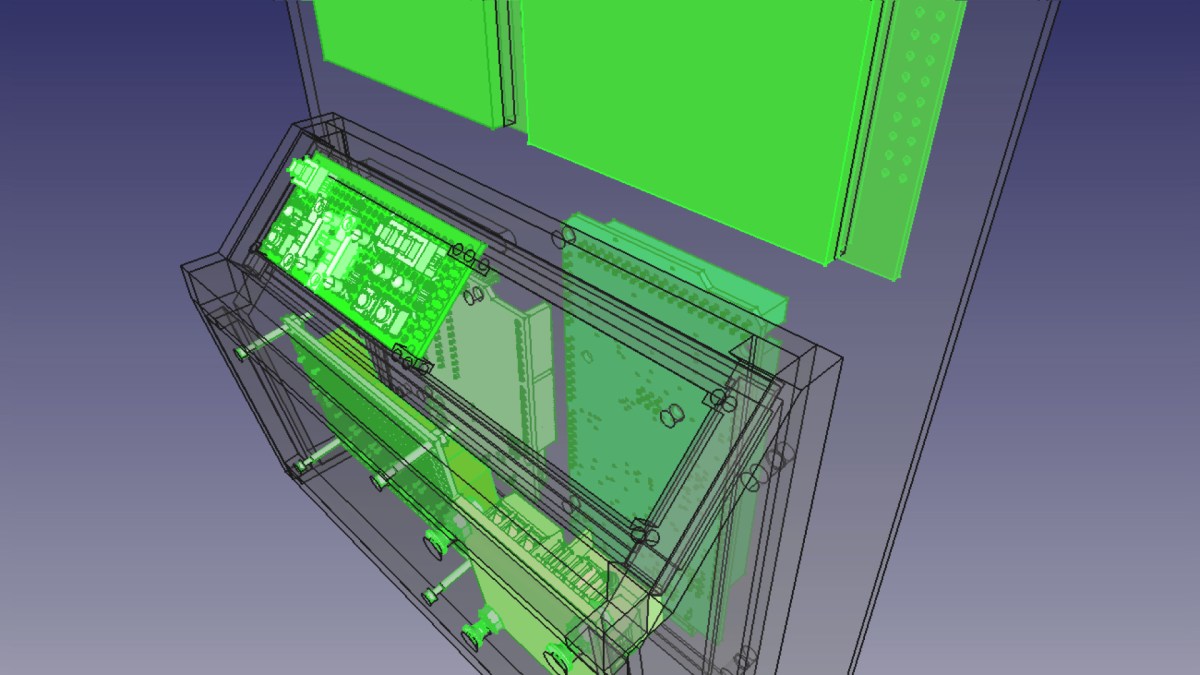
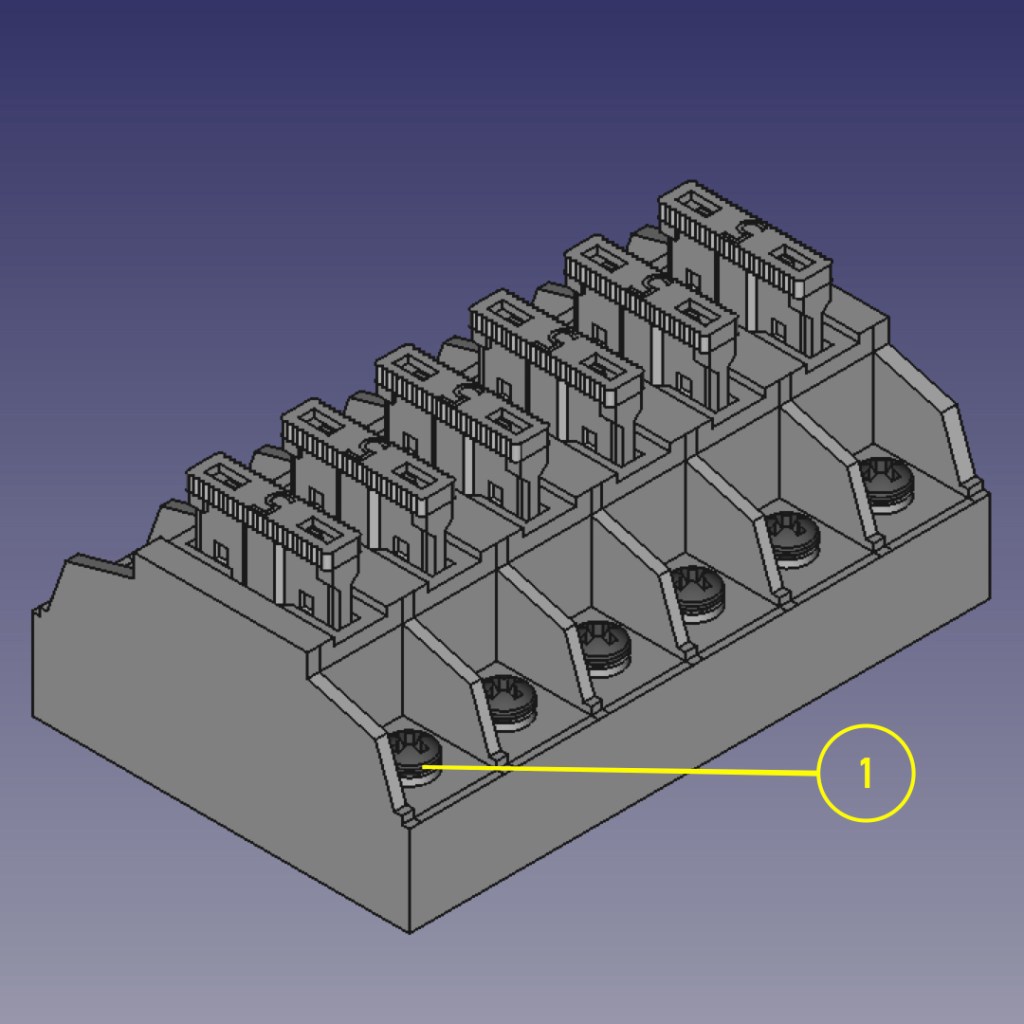
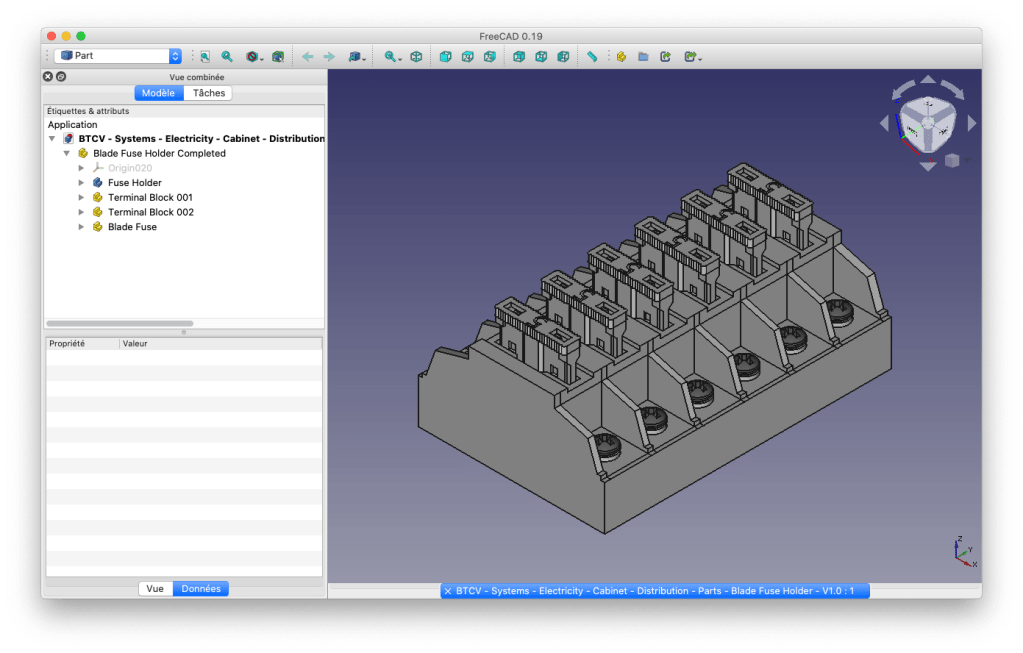
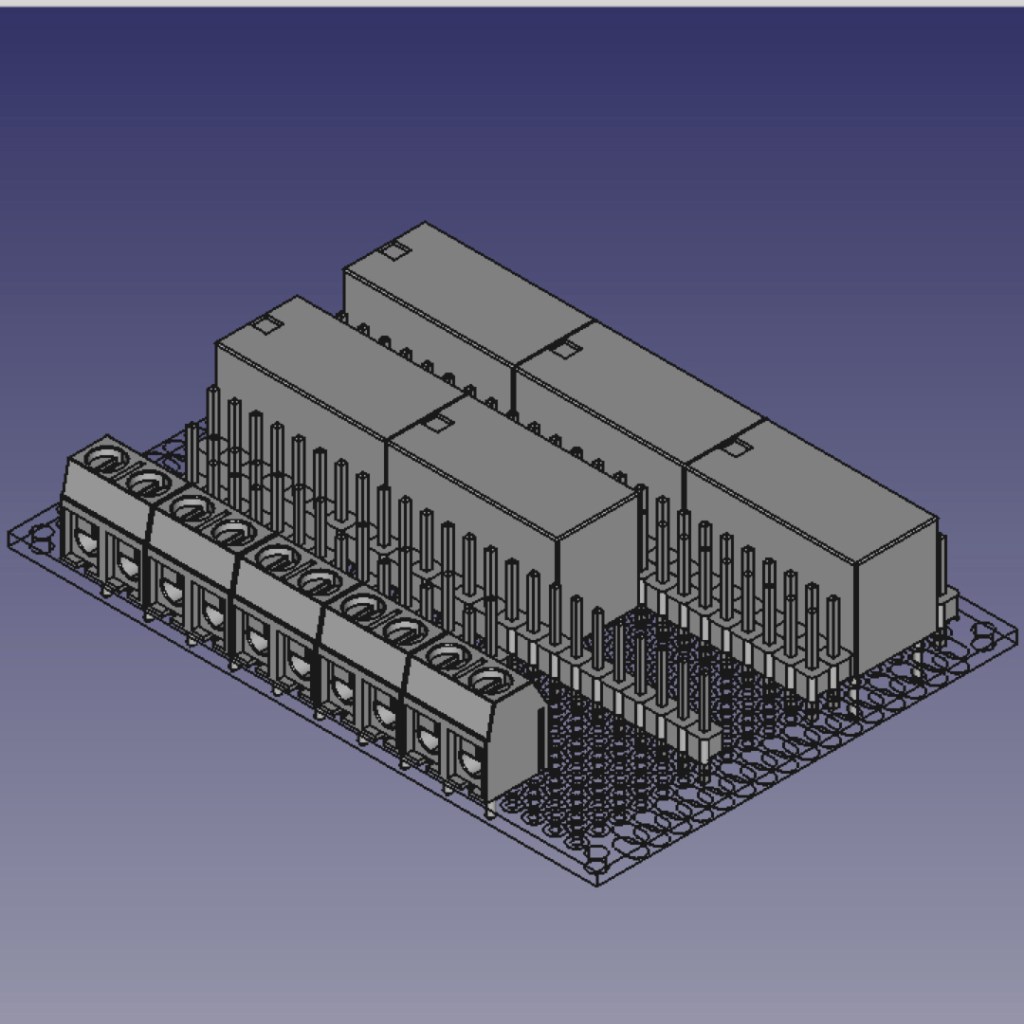
Détail des borniers de raccordement électriques


Compte tenu des dimensions à l’échelle 1/12 de ces armoires électriques, la conception de l’intégration des composants doit être précise. Le point crucial réside dans le design et l’intégration des borniers de raccordement électriques.