Informations générales
Cet article présente le premier modèle opérationnel du local électrique à l’échelle 1/12 du diorama pédagogique Batcave du projet BATLab112. Il décrit la fabrication itérative du poste électrique fonctionnel, sa distribution des tensions adaptées à des contraintes techniques et de sécurité, ainsi que des aspects de réalisation mécanique et d’éclairage intégré.… Lire la suite →
Première publication :
Dernière mise à jour :
Temps de lecture :
Mots clés :
Catégorie :
Sommaire
- Introduction : rôle et enjeux du poste électrique dans le diorama pédagogique de la Batcave
- Architecture générale du poste électrique du diorama BATLab112
- Caractéristiques électriques du réseau électrique du diorama
- Éléments de réalisme et intégration mécanique
- Système d’éclairage du poste électrique du diorama
- Modélisation 3D du diorama avec FreeCAD
- Impression 3D du diorama
- Voir aussi
Introduction : rôle et enjeux du poste électrique dans le diorama pédagogique de la Batcave
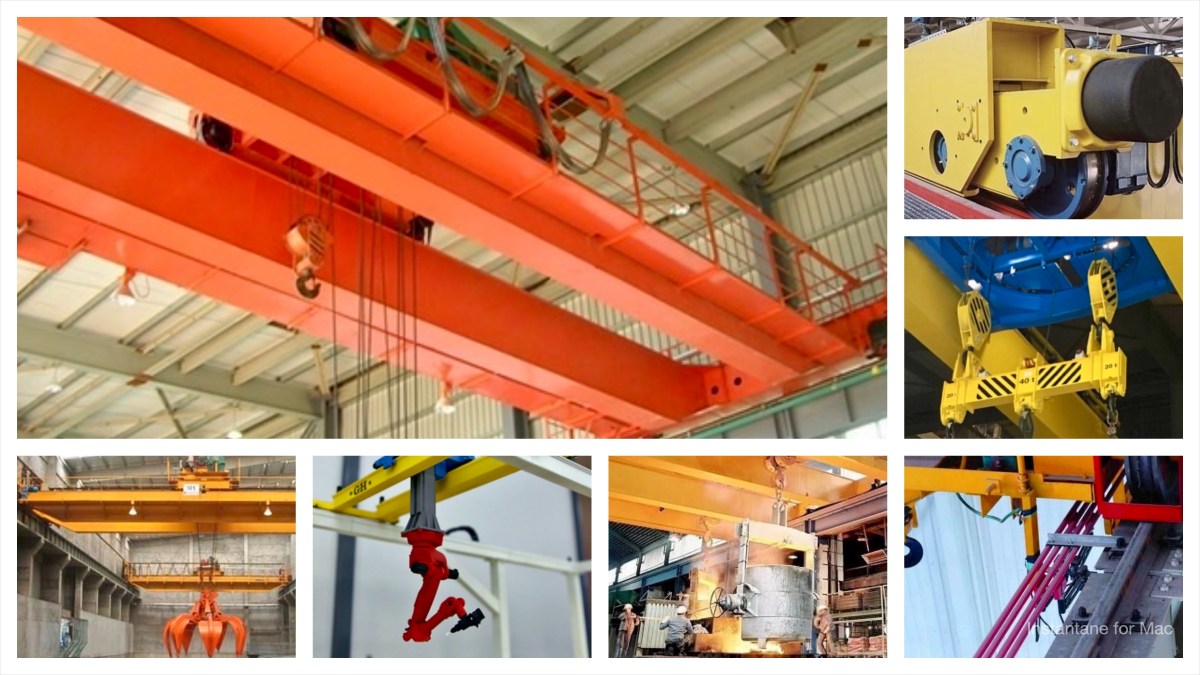
Le poste électrique intégré au diorama de la Batcave du projet BATLab112 constitue un élément structurant et central de l’infrastructure technique du diorama. Il assure la distribution de l’énergie électrique nécessaire au fonctionnement de l’ensemble des systèmes industriels miniaturisés à l’échelle 1/12. Conçu comme un équipement pleinement opérationnel, ce poste électrique vise à reproduire, avec un haut degré de fidélité, les principes de fonctionnement d’un poste électrique réel, tout en étant adapté aux contraintes propres à un dispositif pédagogique et expérimental.
La réalisation de ce prototype ne s’est pas inscrite dans une démarche linéaire aboutissant à une version définitive unique, mais s’est développée de manière itérative tout au long de la phase de conception. Cet article s’inscrit ainsi dans la continuité de la troisième évolution de la conception détaillée du poste électrique.
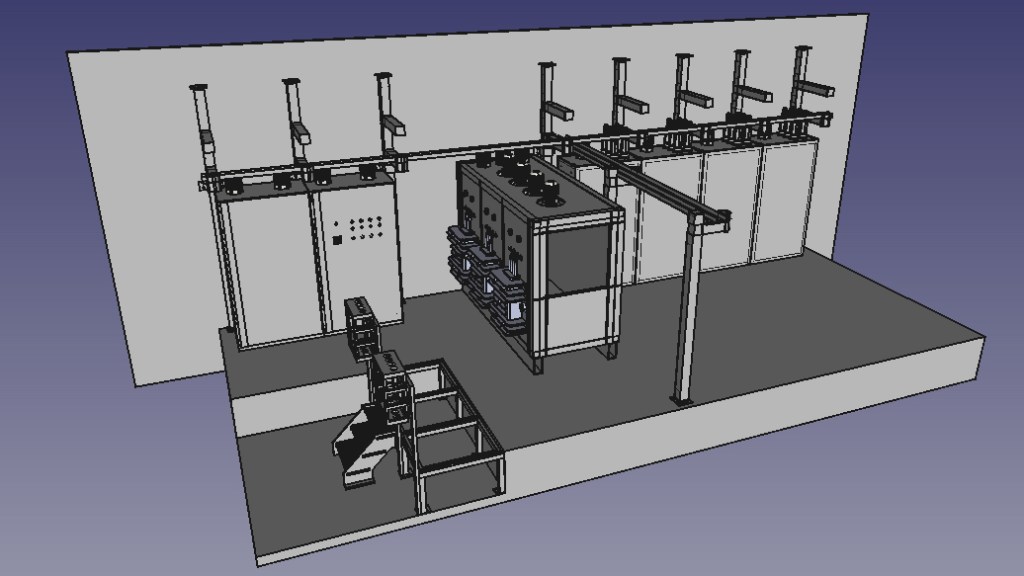
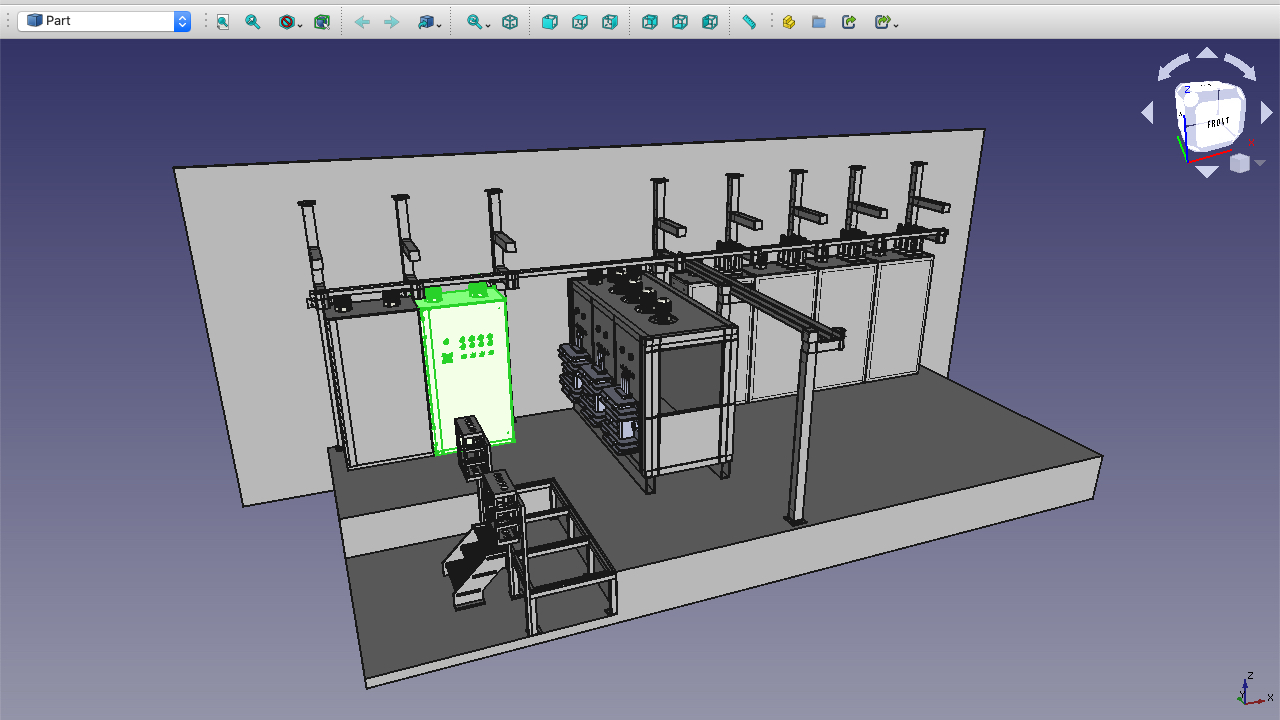
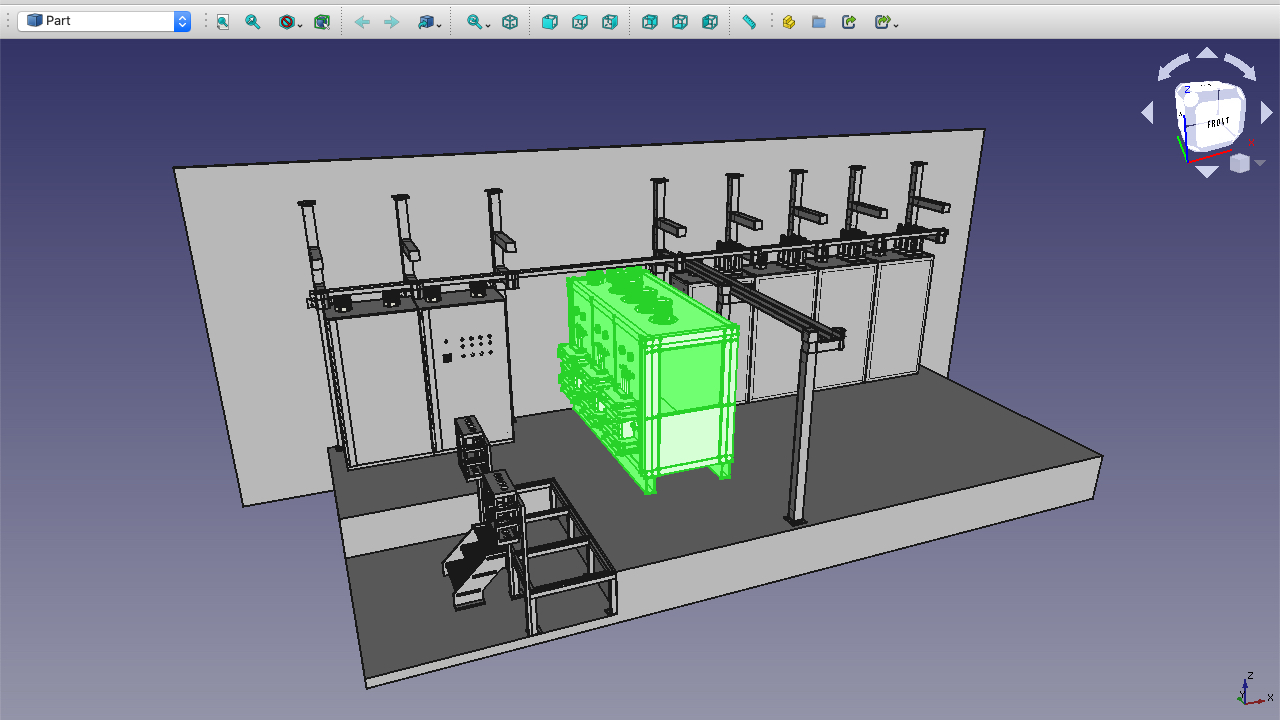
Architecture générale du poste électrique du diorama BATLab112
Le poste électrique du diorama se compose de deux sous-ensembles distincts, chacun ayant fait l’objet de phases spécifiques de conception et de prototypage : le poste de transformation HT/BT et les armoires de distribution électrique.


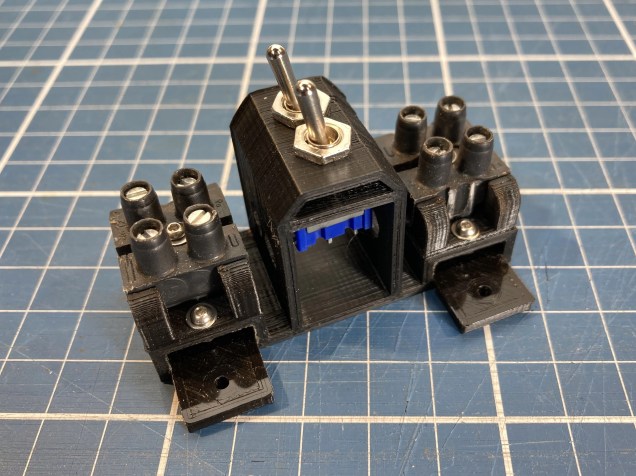
Poste de transformation HT/BT à l’échelle 1/12 : adaptation fonctionnelle et contraintes de sécurité
Le poste HT/BT, réalisé à l’échelle 1/12 dans le cadre du diorama pédagogique du projet BATLab112, reproduit le fonctionnement général d’un poste de transformation réel. Toutefois, les niveaux de tension et les caractéristiques électriques des tensions d’entrée et de sortie ont été volontairement adaptés. Ces ajustements répondent, d’une part, aux contraintes techniques inhérentes au diorama et, d’autre part, aux exigences de sécurité liées à la manipulation des équipements. Dans ce contexte, la « haute tension » correspond à l’alimentation électrique générale du diorama, fournie par une prise secteur de 230 V en courant alternatif (AC), tandis que la « basse tension » est définie comme une tension de 12 V en courant continu (DC), compatible avec les besoins des modules électroniques intégrés au diorama, tels que les cartes Arduino, les écrans tactiles et les circuits imprimés.
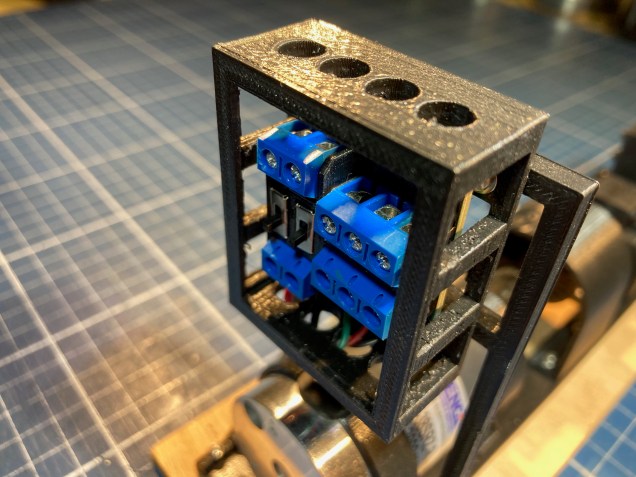
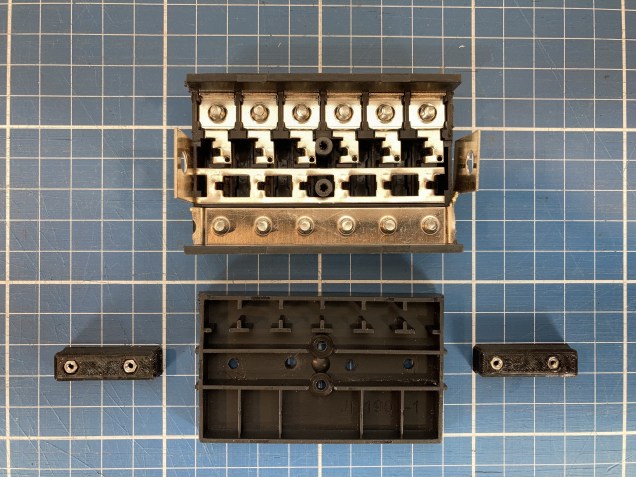
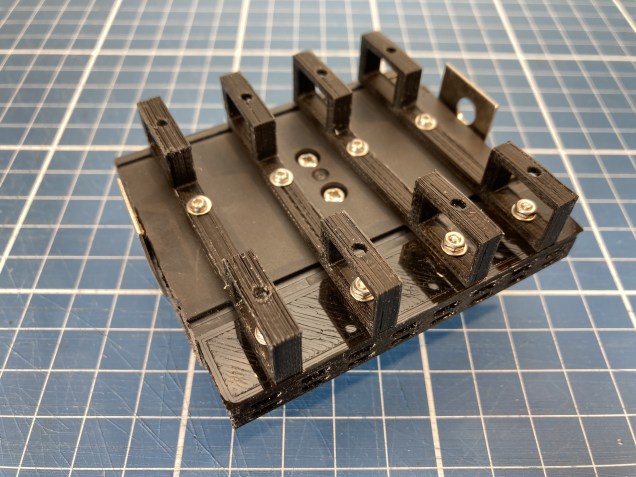
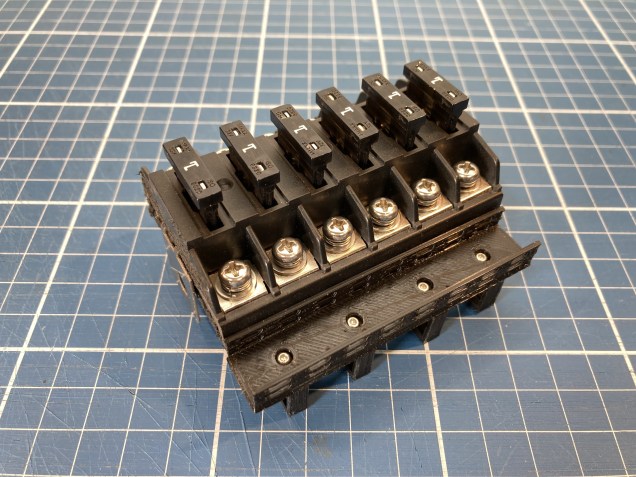
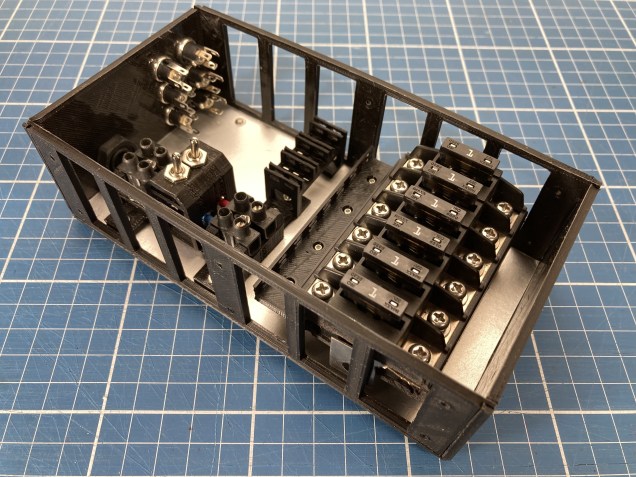
Armoires de distribution électrique : gestion des tensions et rationalisation énergétique du diorama
Les armoires de distribution électrique assurent quant à elles la répartition des différentes tensions nécessaires à l’alimentation des modules électroniques et des actionneurs électromécaniques. La phase de conception préliminaire, associée au sourcing des composants, a permis de rationaliser l’architecture électrique en limitant à trois le nombre de niveaux de tension requis pour l’ensemble des modules électroniques : 5 VDC, 6 VDC et 12 VDC. Chaque armoire de distribution est dédiée à un niveau de tension spécifique. Une quatrième armoire est exclusivement consacrée à l’alimentation des moteurs du pont élévateur. Bien que ces moteurs fonctionnent également sous une tension de 12 VDC, ce choix vise à limiter la quantité d’énergie électrique transitant au sein d’une même armoire, dans une logique de sécurité et de gestion des flux énergétiques.
Caractéristiques électriques du réseau électrique du diorama
Les caractéristiques électriques détaillées du poste électrique du diorama du projet BATLab112 sont présentées dans l’article suivant :

Câblage électrique du diorama
Cet article propose une analyse technique approfondie des choix relatifs au câblage du réseau électrique du diorama pédagogique de la Batcave, reproduisant à l’échelle 1/12 une infrastructure électrique fonctionnelle. Il s’inscrit dans le cadre de la documentation technique du projet, en explicitant la conception et le dimensionnement du réseau de distribution électrique depuis la sortie du convertisseur de puissance jusqu’aux consoles de commande.
Lire la suite …Éléments de réalisme et intégration mécanique


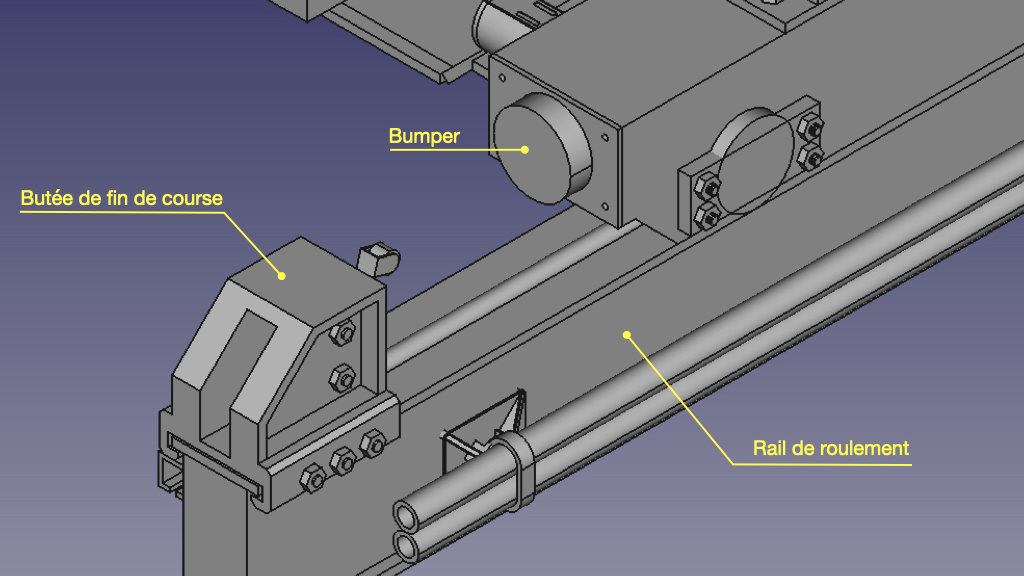
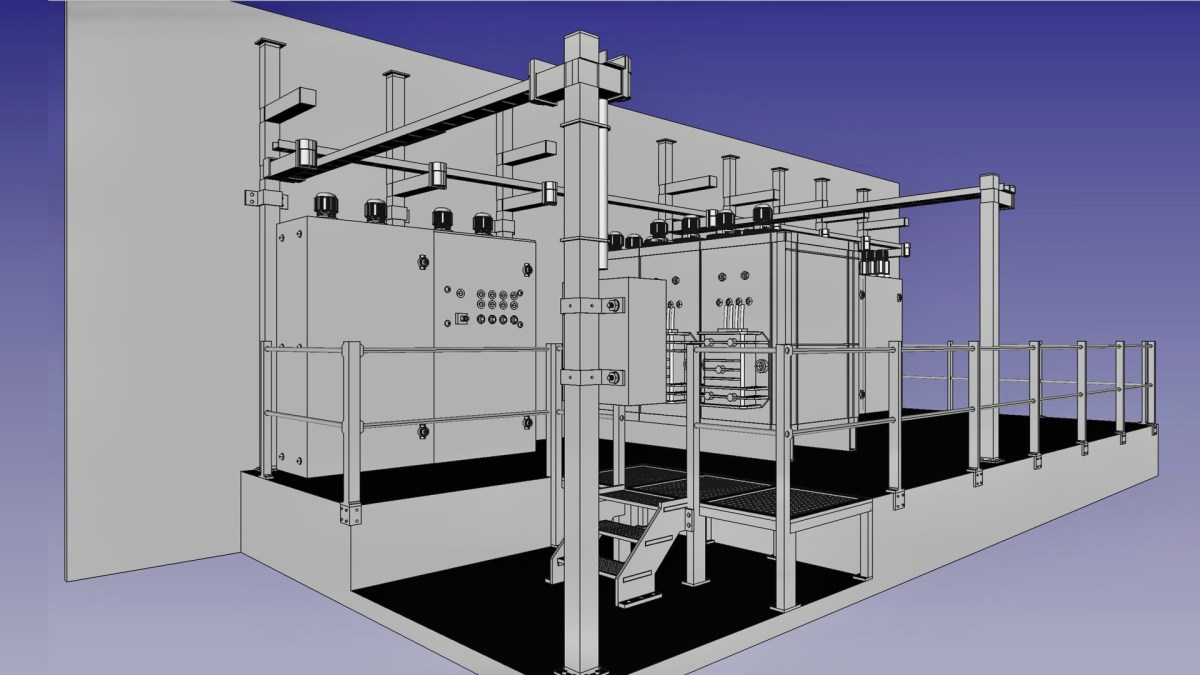
Garde-corps, passerelle et sécurité à l’échelle 1/12
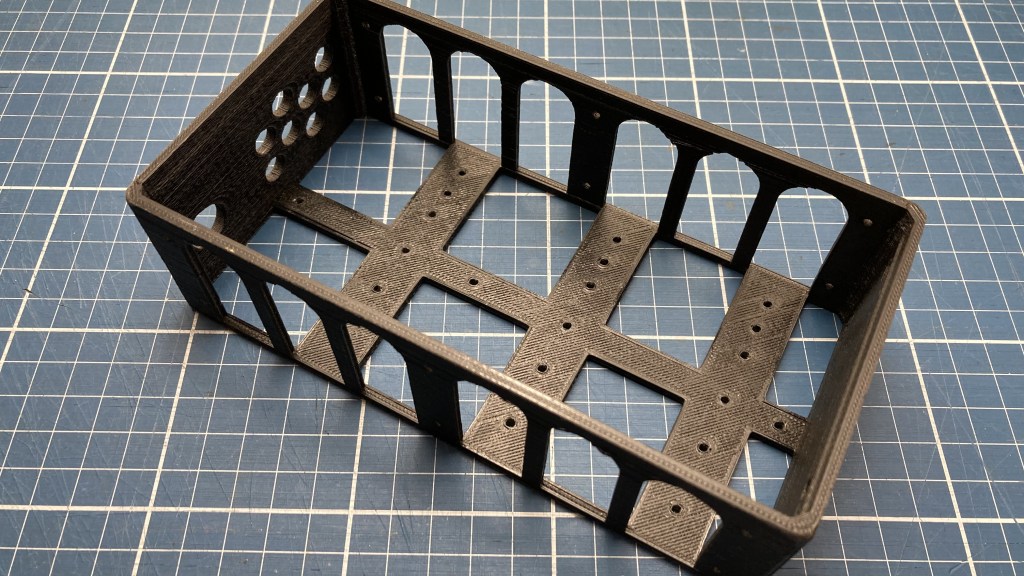
Dans un souci de réalisme et de cohérence avec les standards industriels, la plateforme du local électrique a été équipée de garde-corps assurant la sécurité du personnel, ainsi que d’une passerelle d’accès. Ces éléments ont été réalisés à l’échelle 1/12 par un assemblage boulonné combinant des pièces issues de l’impression 3D — notamment les poteaux des garde-corps et la structure porteuse de la passerelle — et des éléments métalliques, tels que les traverses des garde-corps et le caillebotis de la passerelle.
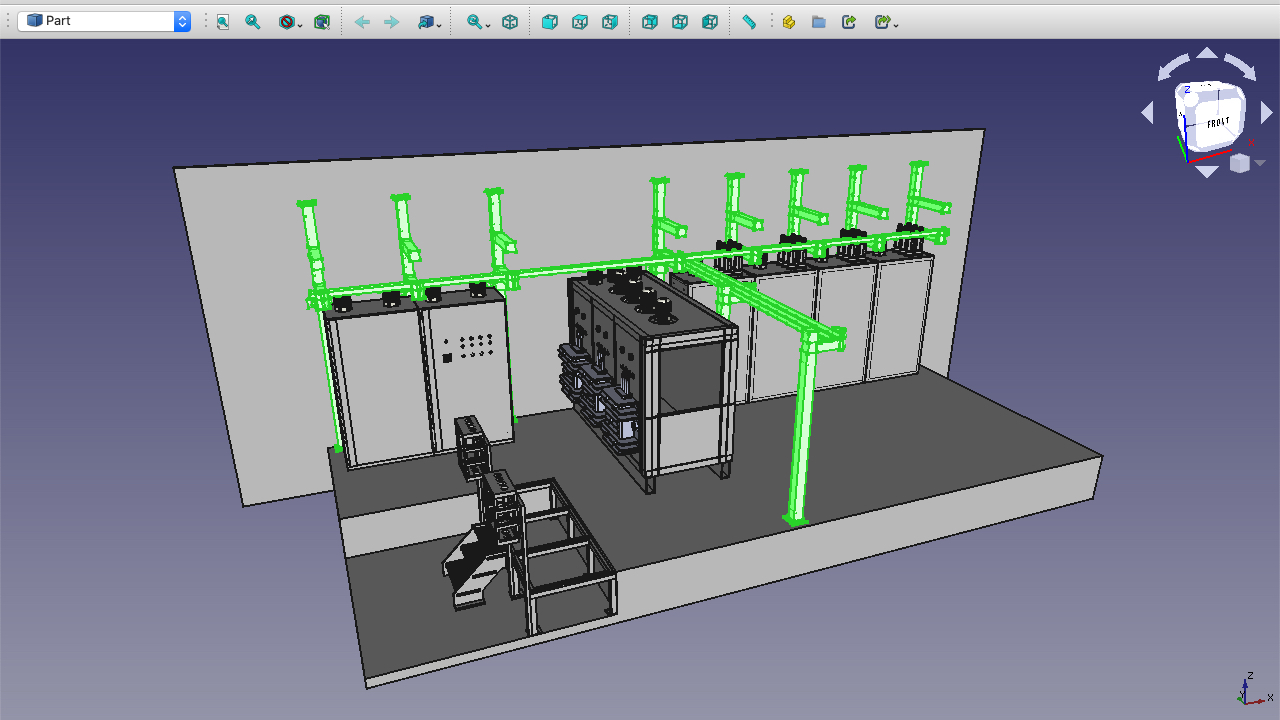
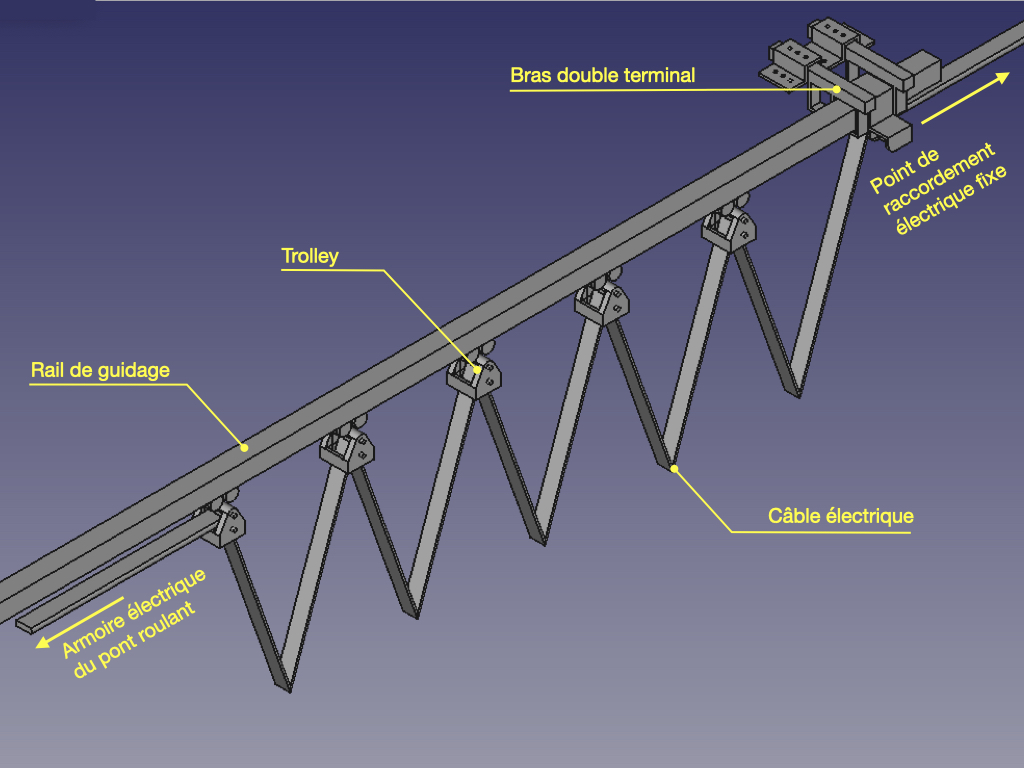
Structure de support des câbles inspirée des racks industriels
Les câbles électriques raccordés aux différents composants du poste sont maintenus par une structure de support directement inspirée des racks de stockage de type cantilever utilisés en milieu industriel. Cette structure a été conçue à partir de profilés en aluminium, associés à des pièces d’assemblage imprimées en 3D, permettant à la fois une bonne rigidité mécanique et une flexibilité dans l’agencement des câbles.
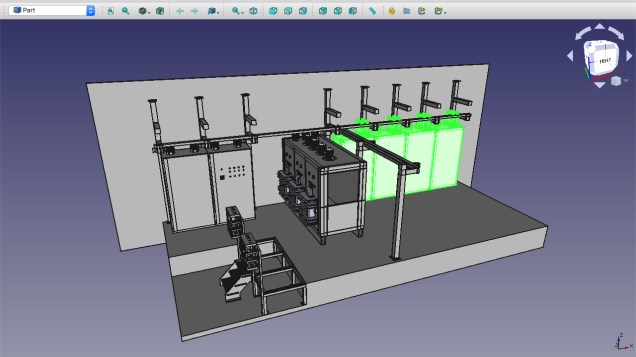
Système d’éclairage du poste électrique du diorama
Principe de câblage et alimentation des luminaires LED
À ce stade d’avancement du diorama, le système d’éclairage du poste électrique relève encore d’un prototype expérimental. Le principe retenu repose sur l’utilisation de boucles composées de six diodes électroluminescentes (LED) rouges montées en série, chacune étant capable de supporter une tension supérieure à 2 VDC. Chaque boucle est alimentée par une tension de 12 VDC. La mise en œuvre de deux boucles distinctes de six LED a été nécessaire pour assurer l’éclairage complet du poste électrique, tel qu’il apparaît sur les supports photographiques associés.


Limites techniques et axes d’amélioration du système d’éclairage
Si le rendu esthétique global est jugé satisfaisant, des améliorations restent à apporter concernant la technique de câblage des luminaires. Ces derniers, réalisés par impression 3D et équipés chacun d’une LED rouge, sont fixés sur les montants horizontaux de la structure métallique supportant les câbles. Toutefois, le raccordement électrique des luminaires au circuit 12 VDC présente une tenue mécanique insuffisante. Les vibrations induites par les opérations de branchement et de débranchement des connecteurs des armoires électriques peuvent entraîner la déconnexion intempestive des luminaires, ce qui souligne la nécessité d’une évolution de cette solution technique.
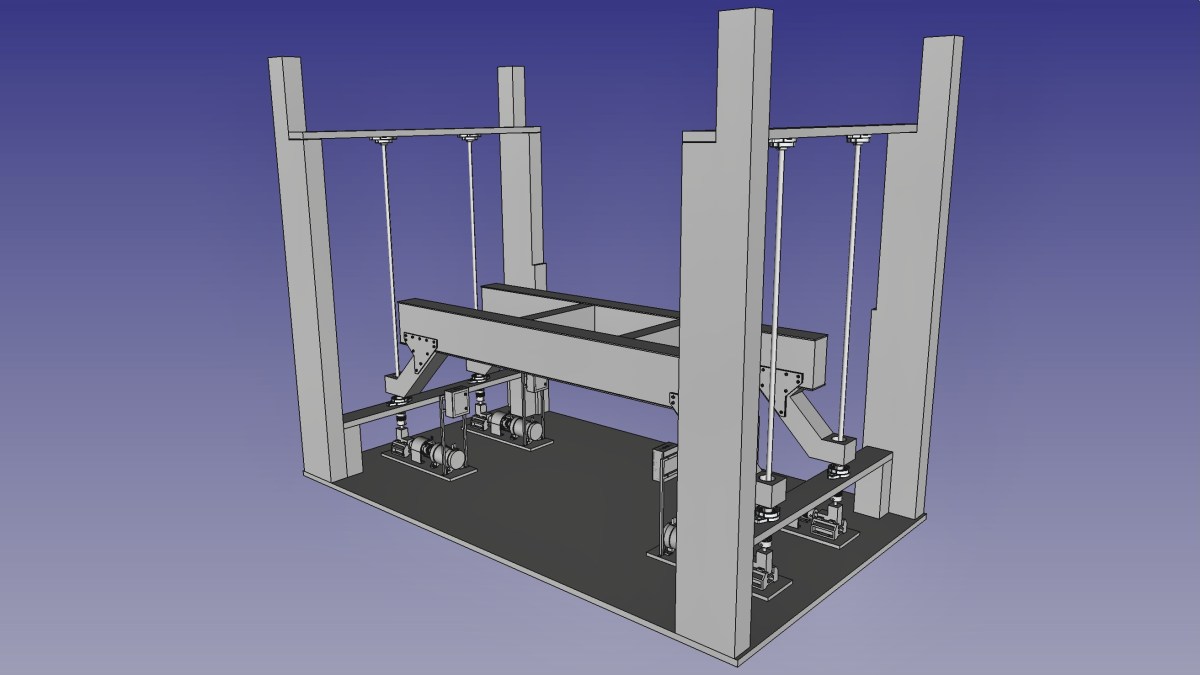
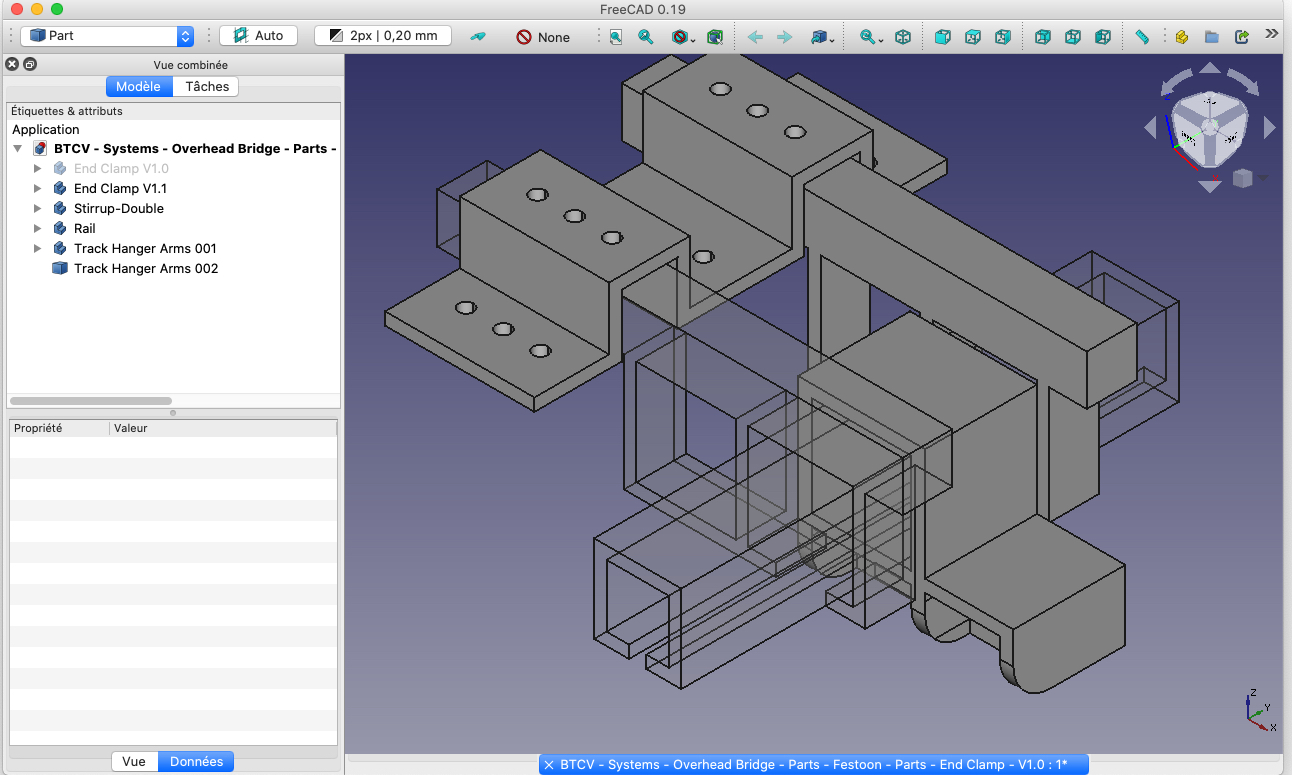
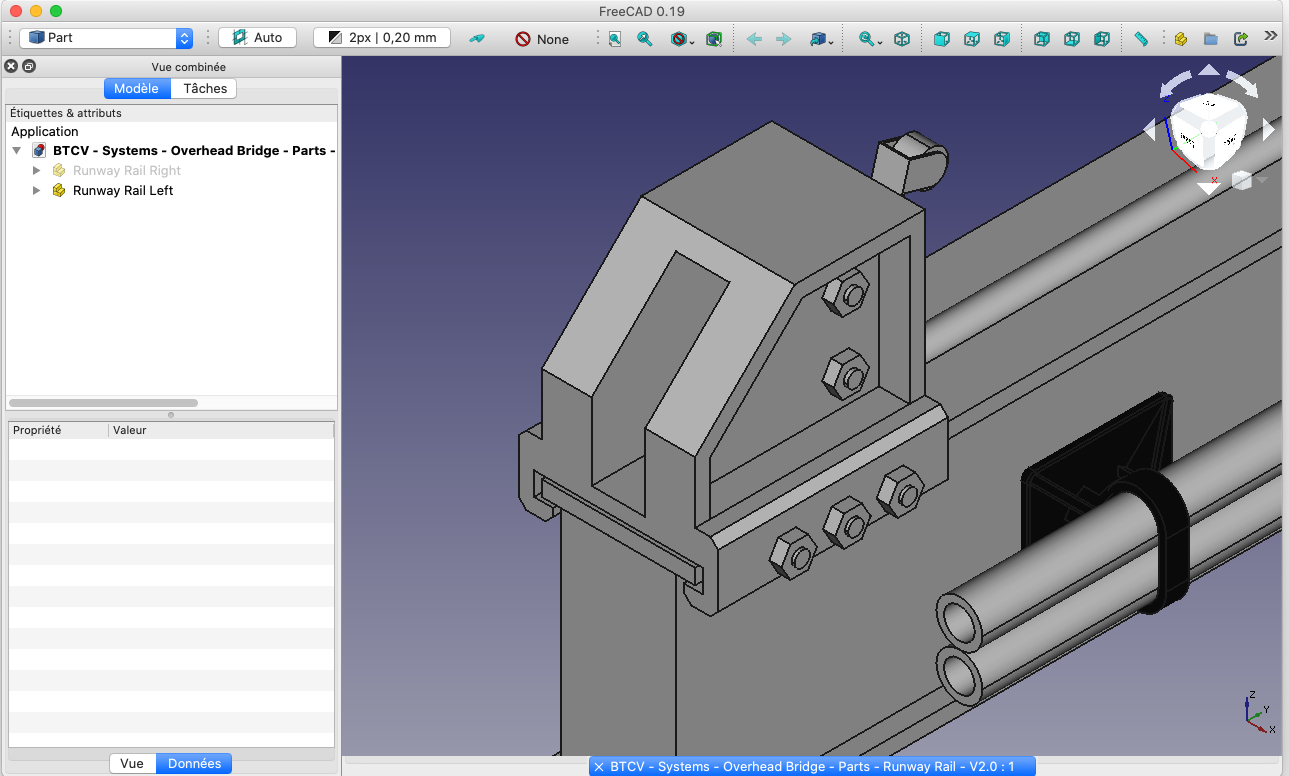
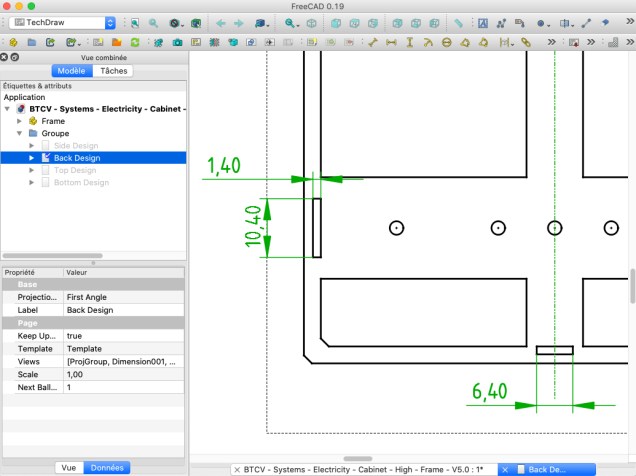
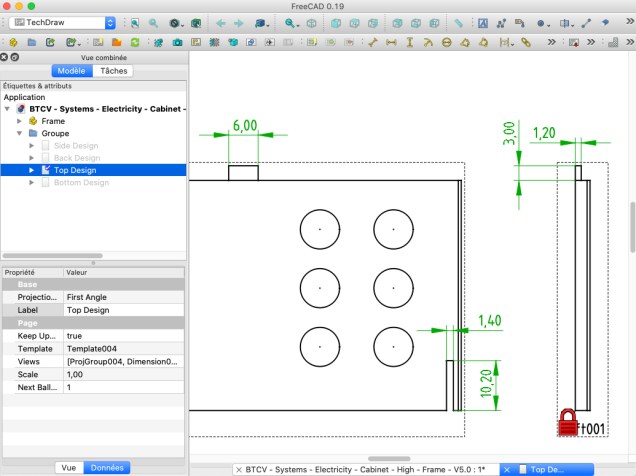
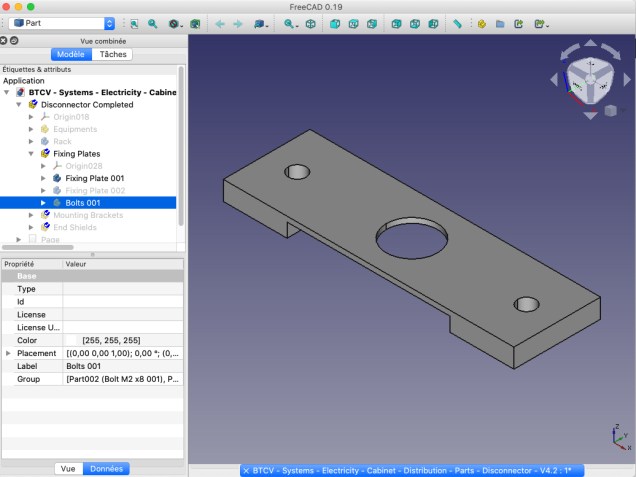
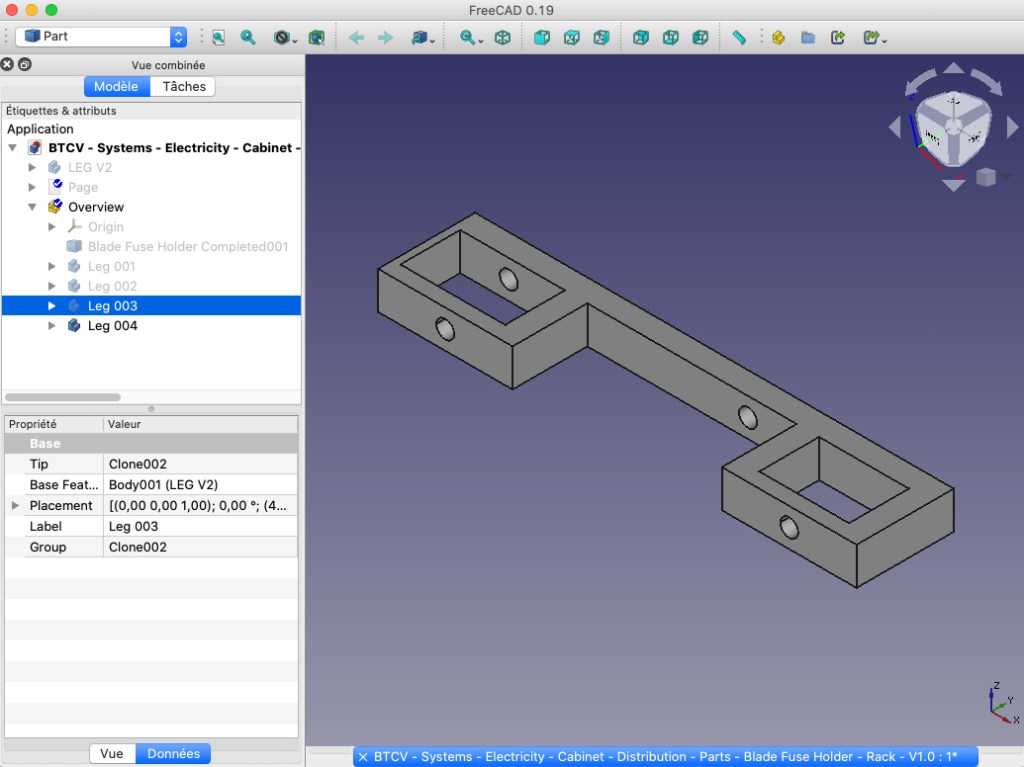
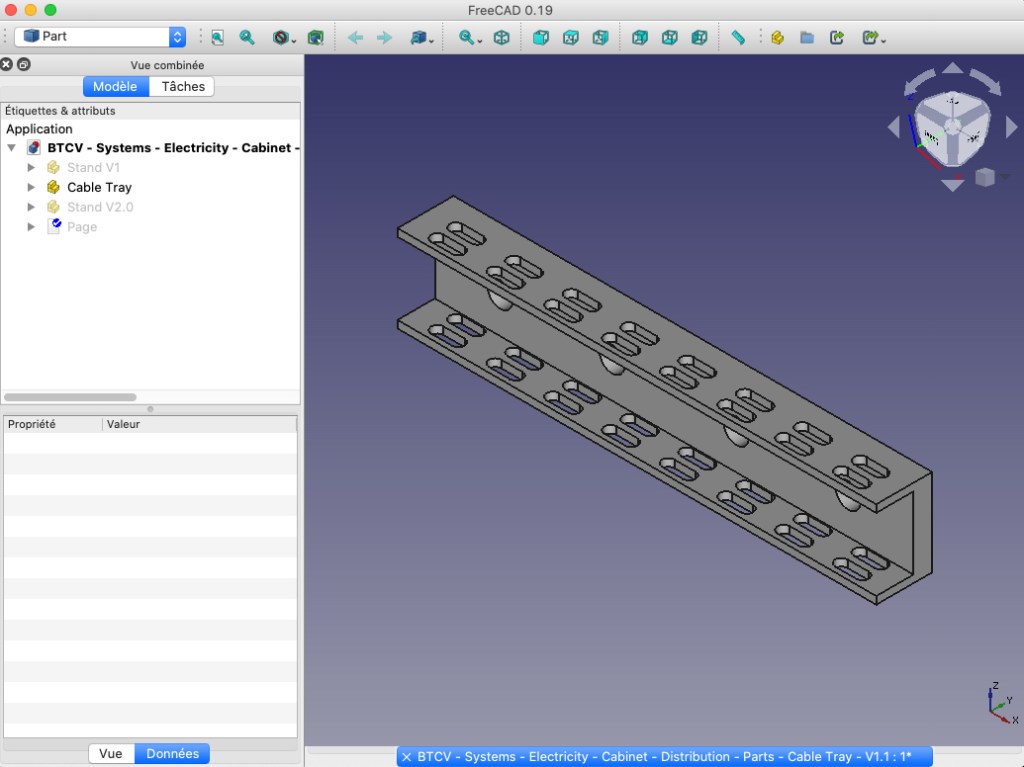
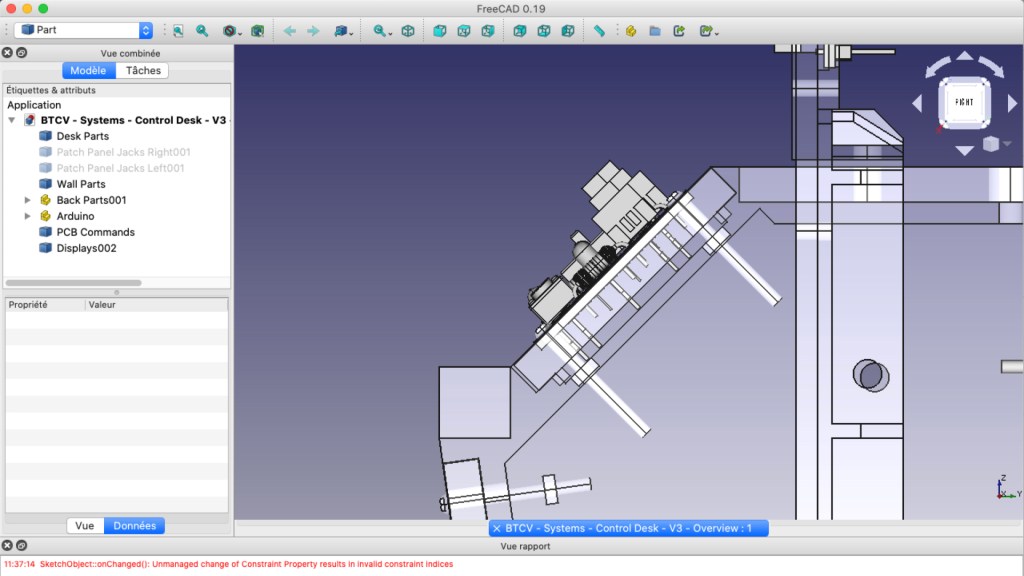
Modélisation 3D du diorama avec FreeCAD
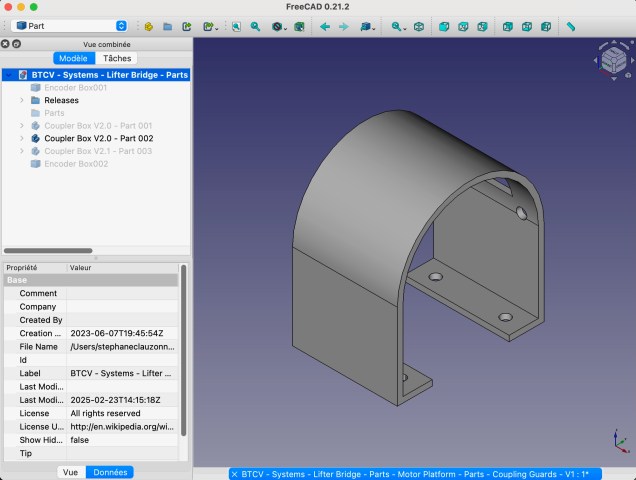
La modélisation 3D du réseau électrique du diorama de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCAD.

Le projet BATLab112 utilise la version 0.21.2 du modeleur 3D FreeCAD pour la conception du diorama de la Batcave à l’échelle 1/12. FreeCAD permet de structurer la conception du diorama en amont de sa fabrication, de visualiser des volumes, vérifier des proportions et anticiper des contraintes techniques. L’utilisation de FreeCAD constitue un support méthodologique rigoureux pour la réalisation précise et cohérente de l’ensemble.



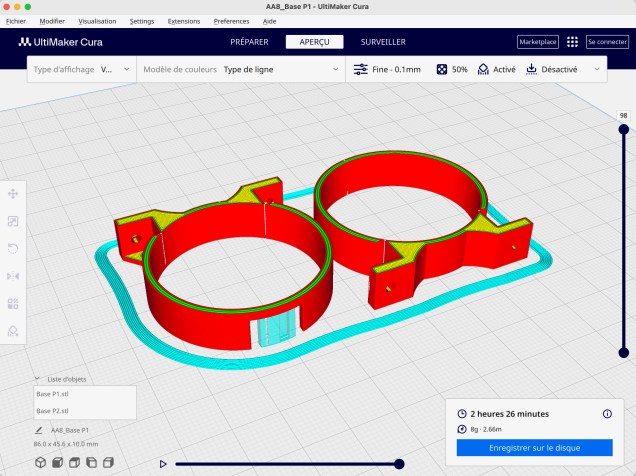
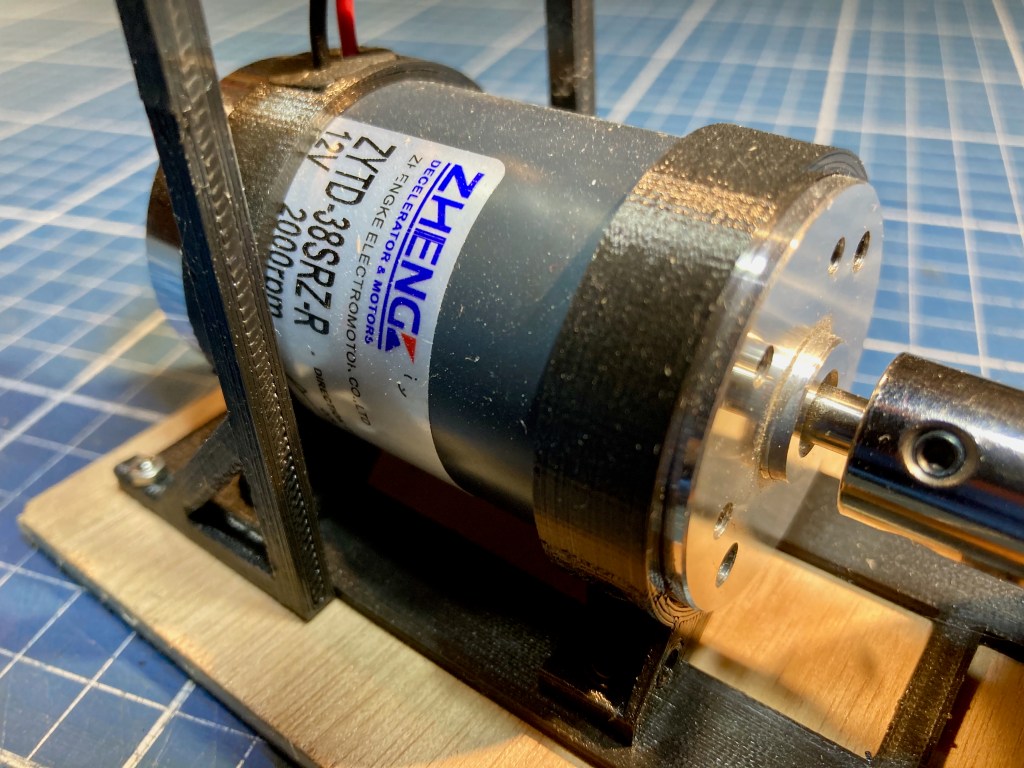
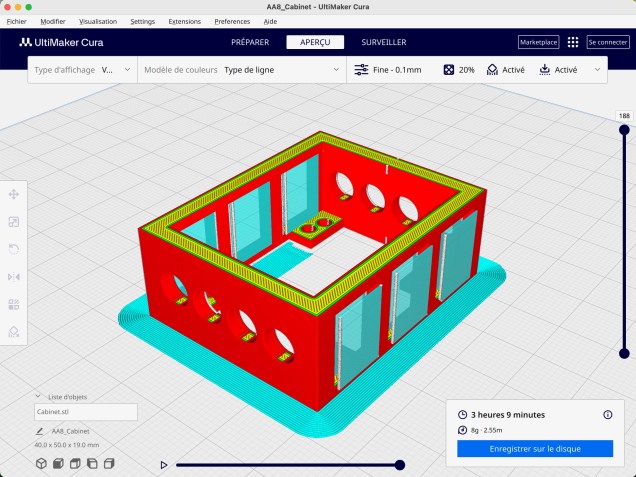
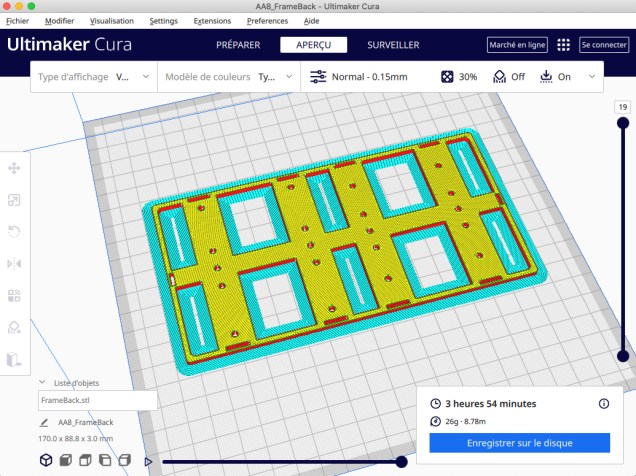
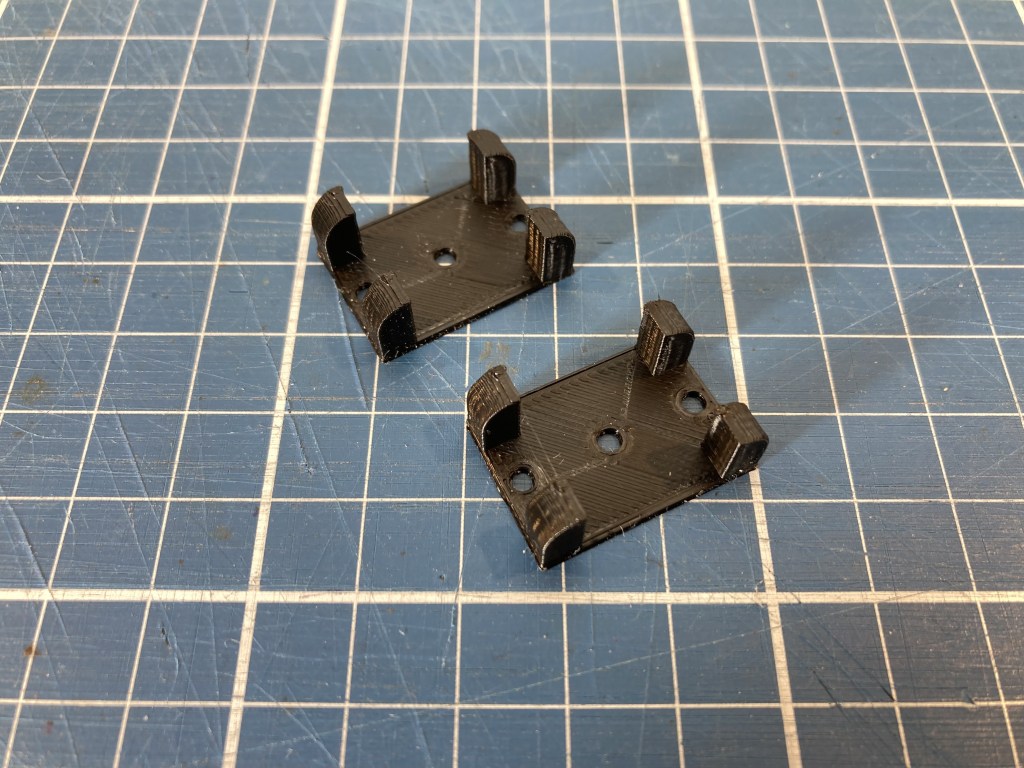
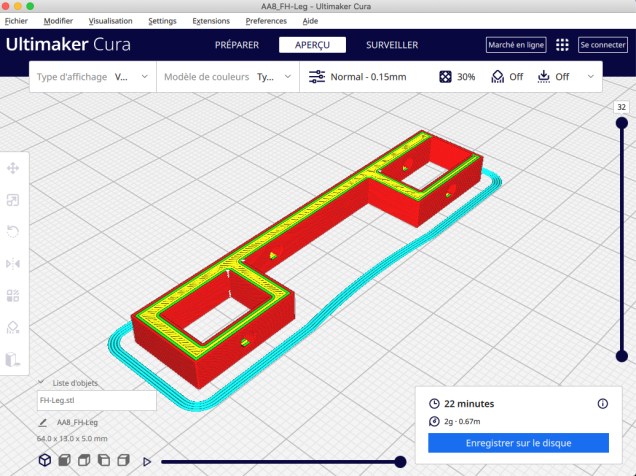
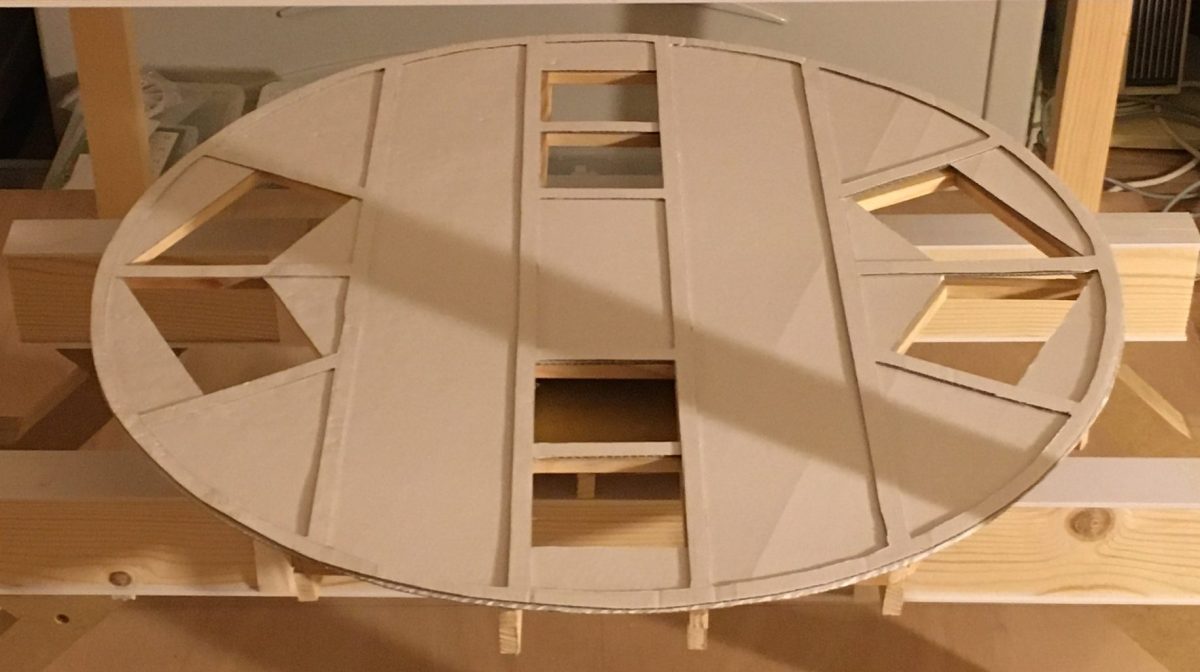
Impression 3D du diorama


L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.