Le diorama du projet BATLab112 est développé sur fond propre. En 2018, lorsque j’ai cherché un logiciel de conception et de modélisation 3D , il n’était pas envisageable d’investir sur des logiciels tels que SolidWorks ou AutoCAD. J’ai ainsi orienté mes recherches du côté des logiciels libres de droit en espérant trouver une solution fiable et performante. Un autre paramètre déterminant pour moi, utilisateur quotidien d’ordinateur Apple, ce logiciel devait fonctionner sous MacOS.
Une communauté active.
Mes premiers critères de sélection dans le choix d’un logiciel libre sont le dynamisme de sa communauté de développement ainsi que la pertinence technique des mises à jour. Concernant le dynamisme de la communauté FreeCAD le contenu du site web officiel : https://www.freecadweb.org est suffisant pour ce faire une idée ; les dernières informations sont récentes et le forum très réactif. Pour ce qui est de la pertinence des mises à jours; la page wikipedia https://fr.wikipedia.org/wiki/FreeCAD#cite_note-0.19-73 listant et détaillant ces mises à jour est là aussi suffisante. Elles sont régulières et apportent de réelles plus-values.
Un premier contact satisfaisant.
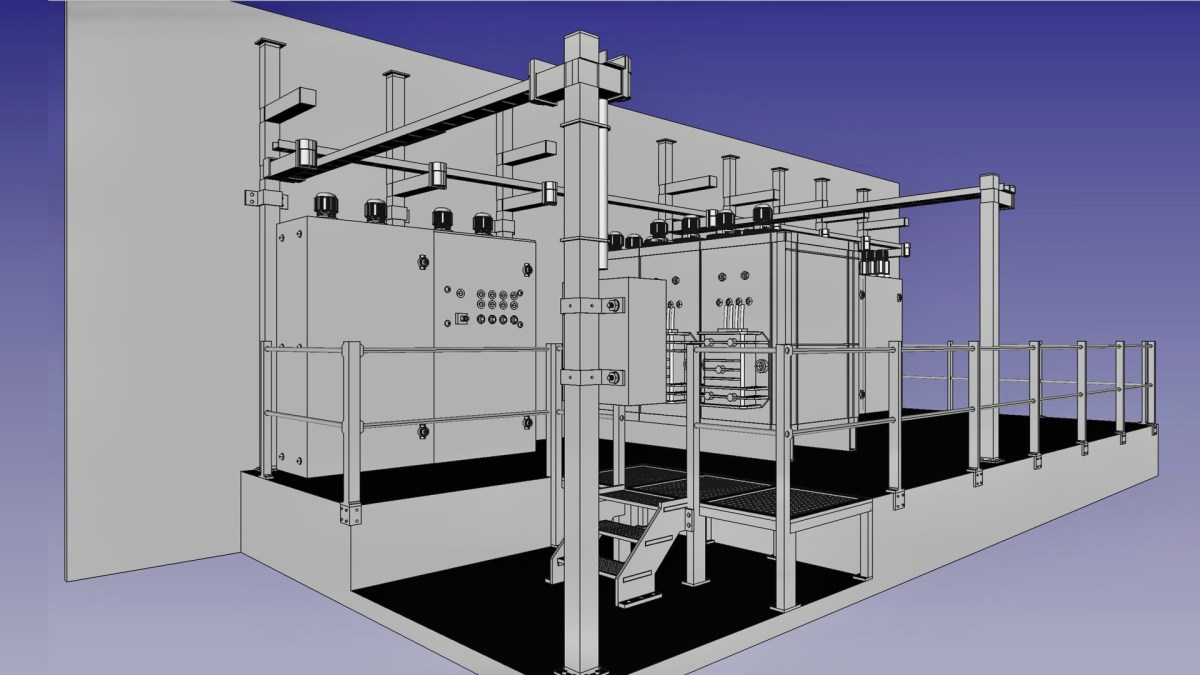
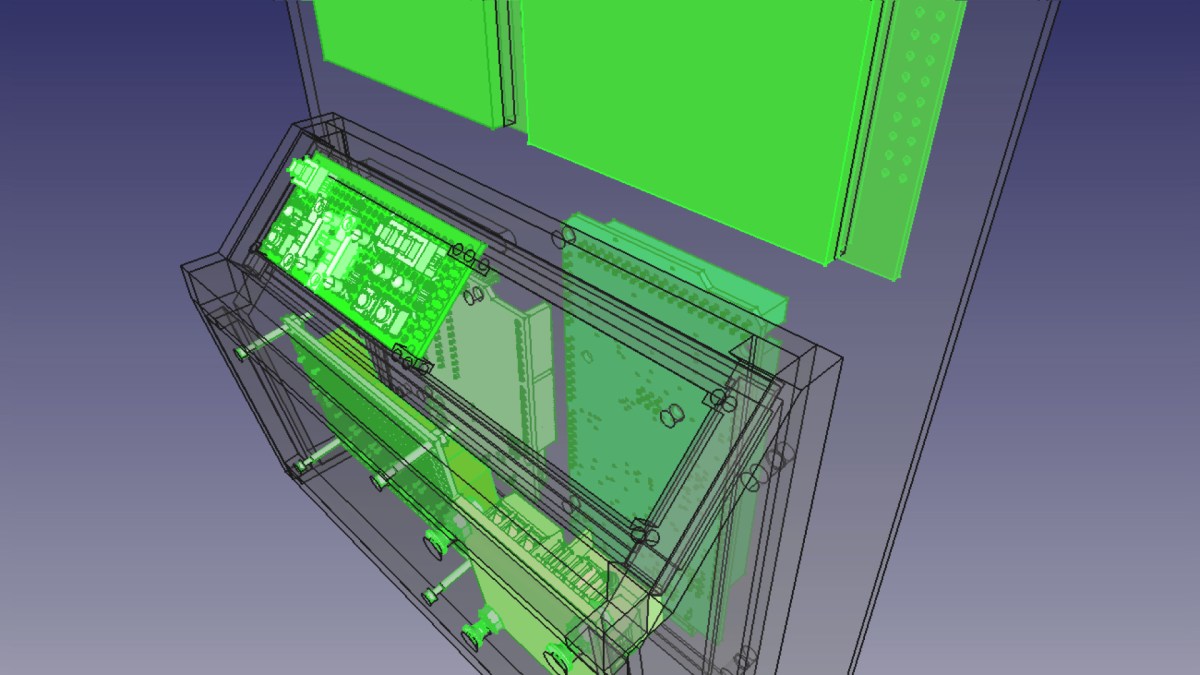
Au début de l’année 2018, je télécharge la version 0.16 de FreeCAD. A l’aide de quelques tutoriels, je me familiarise vite avec son ergonomie, après avoir compris l’essentiel dans son processus de conception : objet, esquisse, … Le diorama du projet BATLab112 commence alors à prendre forme.
Des caractéristiques intéressantes.
Comme évoqué, je ne voulais pas me satisfaire d’un logiciel juste parce que ce dernier est gratuit. Mais, je ne voulais pas non plus me laisser séduire par un logiciel facile à prendre en main et dont je serai vite soumis à ses limites. FreeCAD est un logiciel de conception en 3D volumétrique paramétrique. Ce n’est certes pas le plus simple d’utilisation des logiciels de CAO 3D gratuits, cependant il est certainement parmi les plus performants de sa catégorie. Après quatre ans d’utilisation au service du projet BATLab112, je n’ai encore pas sentis de limites dans ses capacités techniques.
Quelques fonctionnalités intéressantes
Autres que les fonctions conventionnelles que l’on peut attendre d’un logiciel de conception 3D, voici une liste de quelques fonctionnalités que j’ai particulièrement appréciées à l’usage.
- Le module de dessin industriel, autorisant des plans avec cotations
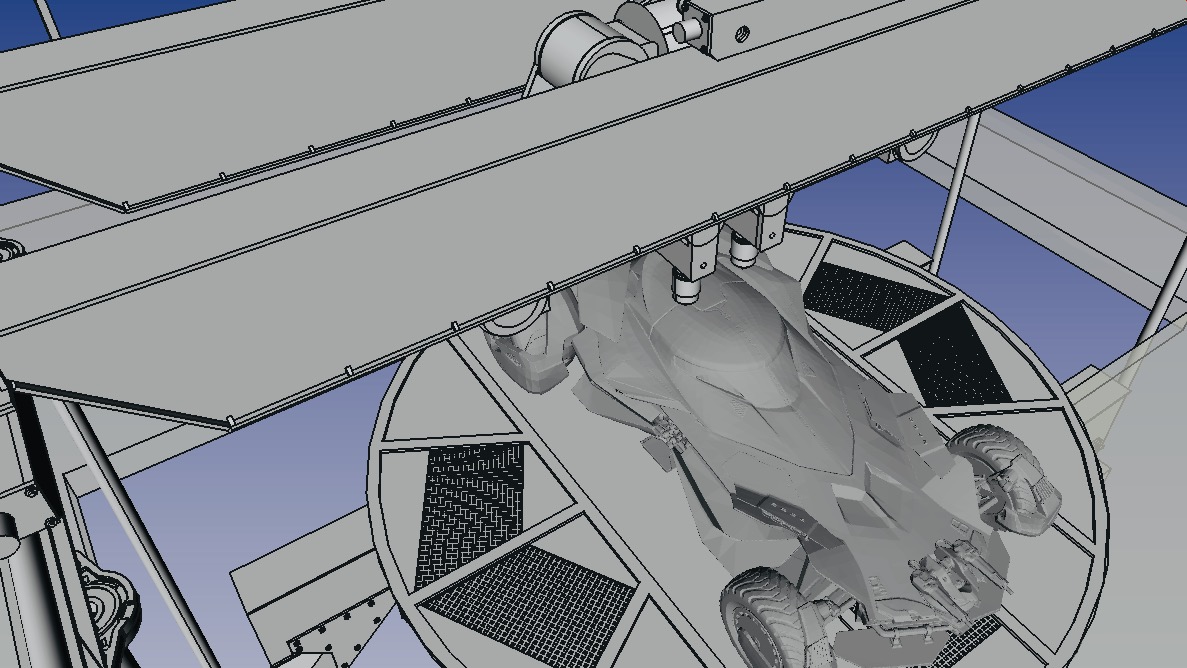
- Le mode d’affichage « vue en perspective » pour un rendu plus réaliste
- Le mode d’affichage « vue en rotation »
- Le module de programmation Python
- L’enregistrement de macros par « apprentissage »