Permettre aux élèves de découvrir les principes fondamentaux de l’électricité et de l’électronique à travers l’expérimentation, sans apport théorique préalable, en développant la curiosité scientifique et la compréhension intuitive des phénomènes électriques.
Objectifs détaillés
Identifier les éléments essentiels d’un circuit électrique simple.
Comprendre les notions de circuit fermé, polarité, tension et résistance à partir de manipulations concrètes.
Expérimenter différents montages et observer leurs effets.
Coopérer au sein d’un groupe pour résoudre un défi expérimental.
Verbaliser les observations et en tirer des conclusions collectives.
Compétences mobilisées
Observer et expérimenter.
Travailler en équipe et communiquer efficacement.
Raisonner par hypothèse et déduction.
Relier la théorie à la pratique.
Développer la motricité fine et la rigueur technique dans l’assemblage.
Programme
Mise en situation
Durée : 10 min
Objectif : Eveiller la curiosité et susciter l’engagement.
Présentation du matériel avec une explication technique sommaire.
Question-problème : « Comment faire s’allumer cette LED ? »
Les élèves formulent des hypothèses et mettent en oeuvre un montage validé par l’intervenant-e.
Expérimentation libre
Durée : 20 min
Objectif : découvrir le fonctionnement d’un circuit simple par essai-erreur.
Par petits groupes, à partir du montage réalisé précédemment, les élèves testent différentes configurations de branchement.
L’intervenant-e guide par questionnement :
« Pourquoi cela ne s’allume-t-il pas ? »
« Que se passe-t-il si on inverse la polarité ? »
Les élèves apprennent par tâtonnement et observation directe.
Structuration des connaissances
Durée : 30 min
Objectif : consolider les apprentissages issus de la manipulation.
Cet article présente la première partie de la conception et du prototypage de l’électronique de commande du pont élévateur, du diorama de la Batcave à l’échelle 1/12, du projet BATLab112.
Cet article fait suite à la conception détaillée mécanique et la réalisation des quatre prototypes de la plateforme de motorisation des axes du pont élévateur. Cet article présente la conception détaillée de l’électronique de commande qui va contrôler les mouvements du pont élévateur en pilotant les moteurs des plateformes.
Atelier de la Batcave – Cahier des charges – Freecad 3D
Le cahier des charges de l’électronique de commande est conforme au cahier des charges général du projet BATLab112 présenté dans l’article ci-dessus. La vidéo associée est la mise à jour de l’illustration de ce cahier des charges initial, intégrant l’avancement de la conception 3D des différents composants du diorama.
L’électronique doit permettre de commander le pont élévateur par la mise en oeuvre des fonctions suivantes :
Commander le sens de déplacement à la verticale du pont élévateur en fonction des actions sur les commandes manuelles.
Maintenir une vitesse constante lors du déplacement à la verticale du pont élévateur pour maintenir l’horizontalité du pont élévateur lors de son déplacement à la verticale.
Détecter les positions haute et basse du pont élévateur pour interdire le déplacement au-delà de ces positions.
Détecter un défaut de rotation d’un des moteurs pour anticiper un éventuel défaut d’horizontalité.
Transmettre des informations sur l’état du système : Position des commandes manuelles, vitesse de rotation des moteurs, défauts …
L’ensemble des fonctions décrites dans le cahier des charges doit être entièrement compatibles avec un raccordement du pont élévateur sur un modèle de console de commande déjà mise en oeuvre dans le diorama pour piloter la plateforme rotative et le pont roulant.
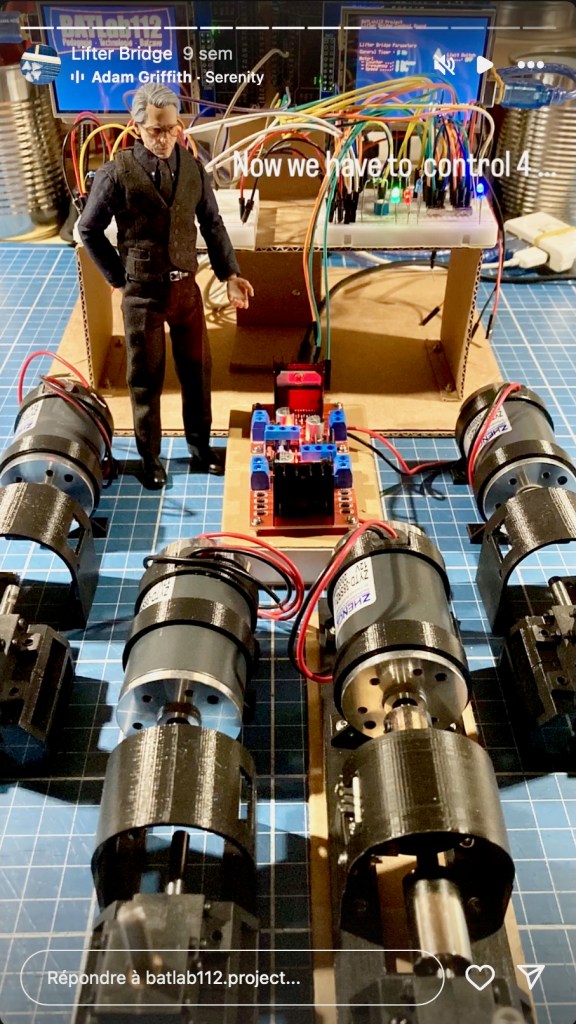
Le mouvement vertical du pont élévateur est assuré par les 4 plateformes de motorisation des 4 axes verticaux. Le principe est très simple la rotation des moteurs entraine la rotation des 4 axes. Ces axes sont des vis sans fin, sur lesquelles est fixé le pont élévateur. La rotation de ces vis sans fin entraine le déplacement verticale du pont.
La console de commande regroupe l’ensemble des commandes manuelles et automatiques pour contrôler la vitesse et le sens de rotation des moteurs, mais aussi les écrans d’affichage de ces informations. La conception de la console de commande a déjà donné lieu à la réalisation de deux modèles opérationnels mis en œuvre pour commander la plate-forme rotative et le pont roulant bipoutre.
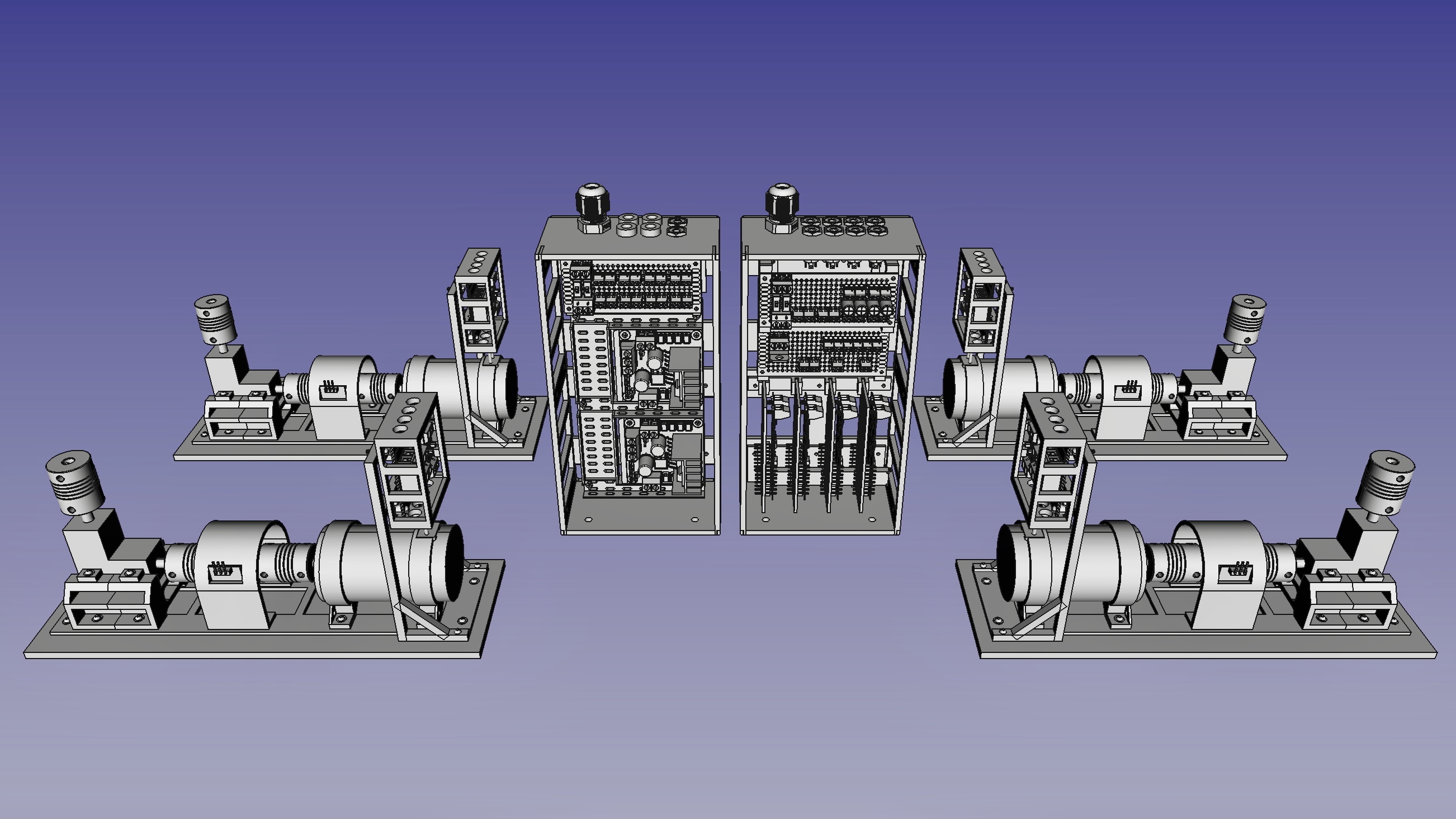
Deux armoires électriques regroupent l’ensemble des composants, des circuits électriques et électroniques nécessaires pour transmettre et convertir les signaux électriques.
Les signaux de commandes issues de la console de commandes sont transmises à une armoire électrique dans laquelle se trouvent deux PCB de type : Double Pont en H à base de L298N. Ces PCB convertissent les signaux de commandes du sens de déplacement vertical du pont élévateur, portés par des tensions de 5VDC, en signaux de tension 12VDC, compatibles avec l’alimentation électrique des moteurs.
ScreenShot FreeCAD Conception 3D
Les plateformes de motorisation des axes du pont élévateur sont connectées, d’une part à l’armoire de contrôle des moteurs, et d’autre part, à une deuxième armoire électrique dans laquelle se trouvent 4 PCB de type convertisseur de fréquence en tension. Ces PCB transforment les signaux électriques en fréquence, issus des photocoupleurs des capteurs de vitesse de rotation présents sur chacune des plateformes, en signaux électriques en tension, compatibles avec les broches d’entrées de l’Arduino en charge de l’affichage de ces informations sur les écrans de la console de commande.
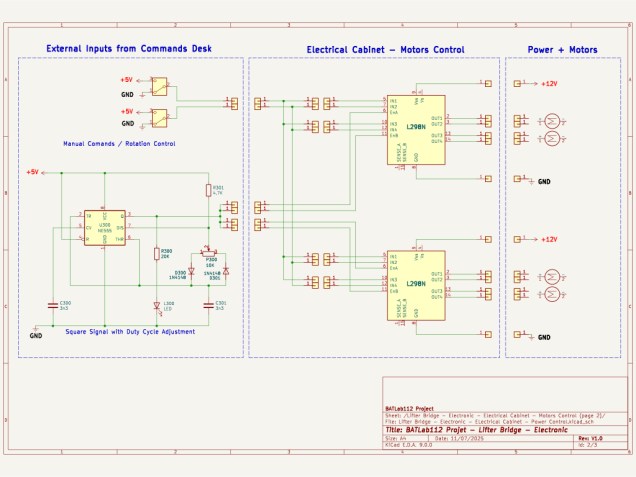
Le schéma du montage électronique se partage en deux parties. La première partie correspond au circuit de contrôle de la vitesse et du sens de rotation des moteurs. La deuxième partie correspond au circuit de conversion des signaux électriques issus des capteurs photocoupleurs de mesure de la vitesse de rotation des moteurs.
Contrôle de la vitesse et du sens de rotation des moteurs
Au centre de ce schéma on retrouve les deux doubles pont en H à base de composants L298N. Chaque pont en H pilote 2 moteurs directement raccordés sur chacune de ses sorties.
Le signal carré à rapport cyclique variable est dirigé vers les entrées EnA et EnB des deux double pont en H pour garantir une vitesse de rotation des moteurs identiques.
Comme mentionné au dessus, la variation de la vitesse de rotation des moteurs est commandée par un générateur de signal carré, à rapport cyclique variable. Ce montage est réalisé à partir d’un oscillateur NE555.
Dans ce montage la résistance R301 et le condensateur C301 fixe la valeur de la fréquence. Le potentiomètre P300 permet le réglage du rapport cyclique.
Les commandes manuelles ont été schématisées le plus simplement possibles ; Deux switches dont la combinaison de leurs positions donne la commande du sens de rotation.
S2
S1
Moteur
0
0
Stop
0
1
Sens 1
1
0
Sens 2
1
1
Stop
Le détails de ces commandes sera développé lors de la conception de la Console de commandes associée au pont élévateur.
Mesure de la vitesse de rotation des moteurs
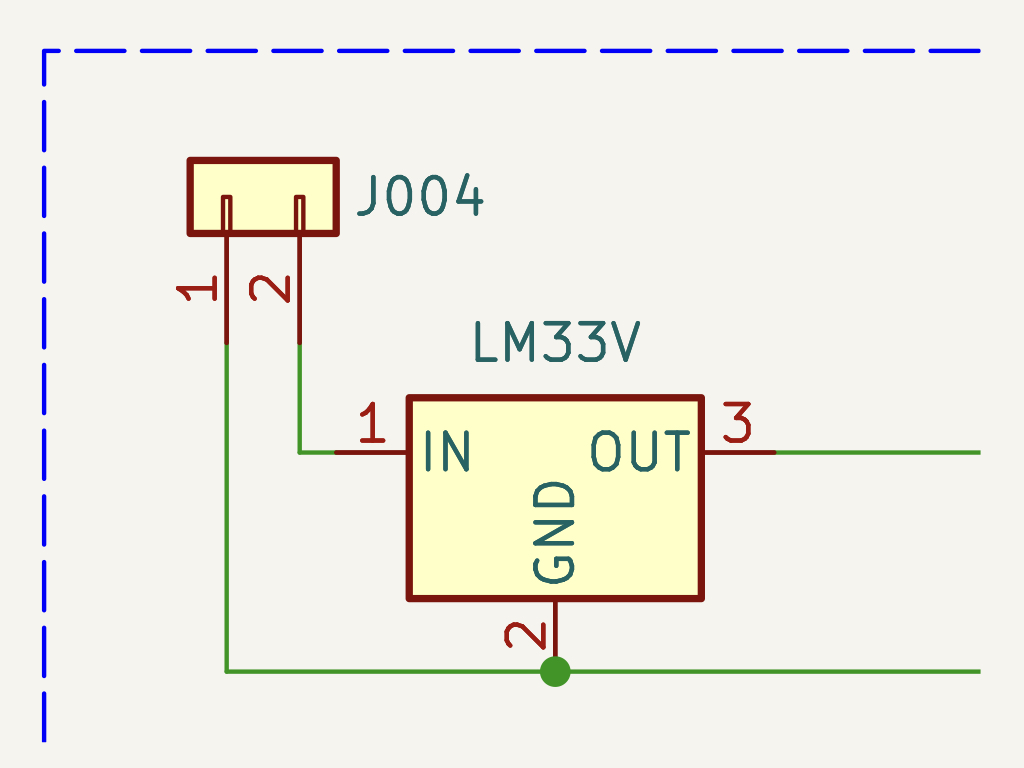
Au centre de ce schéma, on retrouve quatre convertisseurs de fréquence en tension (Hz to V), MIKROE 2890. Ces convertisseurs transforment les signaux électriques en fréquence, issus des photocoupleurs des capteurs de vitesse de rotation, en signaux électriques en tension, compatibles avec les broches d’entrées de l’Arduino.
Le convertisseur Hz to V ayant besoin d’une tension d’alimentation électrique de 3,3V, un convertisseur Tension / Tension, LM33V assure la conversion de la tension d’alimentation électrique de 5VDC en 3,3VDC.
Edition des schémas électroniques
LEs schéma électriques et électroniques du diorama de la Batcave du projet BATLab112 sont édités avec la suite logicielle Open Source KiCad .
Le sourcing des composants principaux est réalisé dès la phase de conception pour intégrer la modélisation 3D de ces composants dans la conception détaillée des armoires électriques.
Le sourcing est réalisé à partir d’une plateforme de ventes en ligne. Ce choix est essentiellement dicté par un objectif de limitation du nombre de fournisseurs, mais aussi de centralisation des commandes et ainsi envisager des économies d’échelle, notamment sur les frais de livraison.
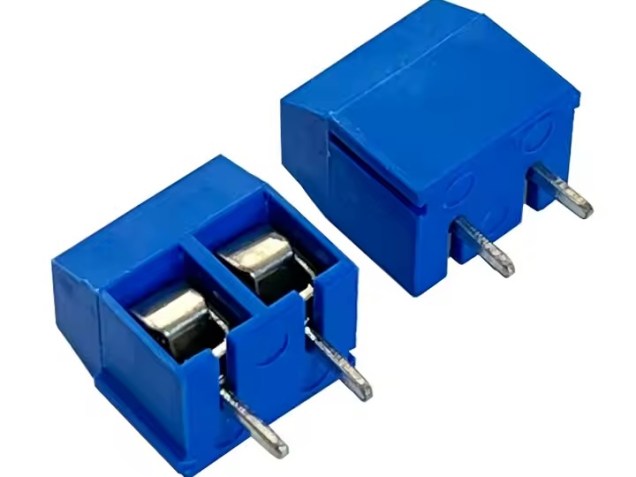
Sourcing câblage
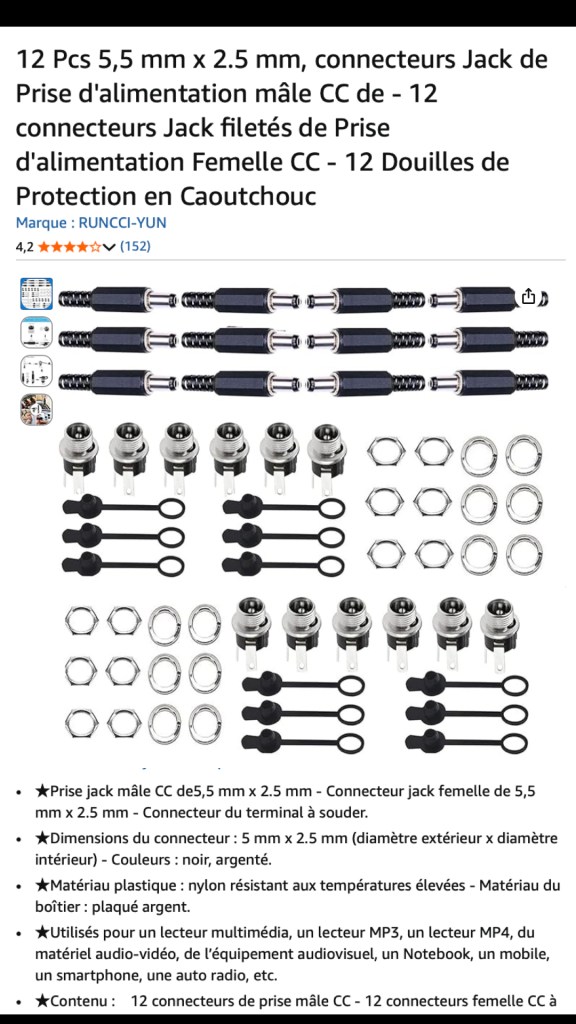
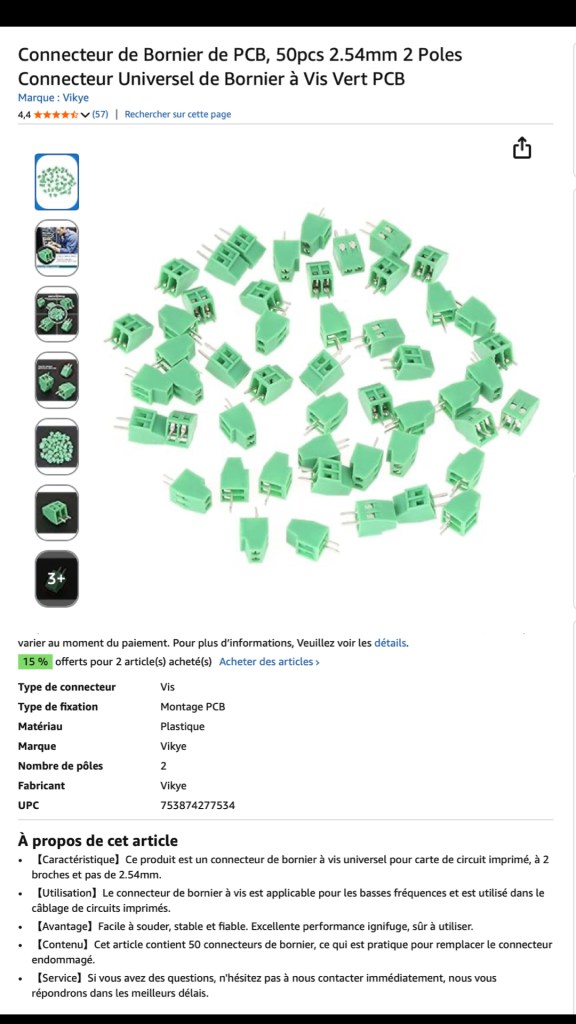
1. Jack 3,5 mm2. Jack 5,5 mm3. Bornier vert4. Bornier bleu5. Presse étoupe
Les prises Jack 3,5 mm sont utilisées en entrées/sorties pour connecter des câbles de très petites sections véhiculant des signaux de commandes de très faibles intensités.
Les prises Jack 5,5 mm sont utilisées en sorties pour connecter des câbles de sections plus importantes pour alimenter des éléments tels que les moteurs à courant continu.
Les borniers verts sont utilisés en entrées/sorties pour connecter des câbles de très petites sections véhiculant des signaux de commande en interne d’une armoire électrique.
Les borniers bleus sont utilisés en entrées/sorties pour connecter des câbles de sections plus importantes véhiculant des tensions d’alimentation d’éléments tels que des moteurs.
Les presse étoupes sont utilisé en entrées d’une armoire électrique pour connecter le câble d’alimentation général de l’armoire.
Sourcing des composants actifs
Le contrôle du sens et de la vitesse de rotation des moteurs à courant continu est assuré par une carte électronique de type Double pont en H équipée d’un composant L298N.
Une carte est capable de piloter deux moteurs simultanément, par conséquent, deux cartes de ce type sont nécessaires pour piloter les moteurs des quatre plateformes de motorisation des quatre axes du pont élévateur.
La mesure de la vitesse de rotation des moteurs est assuré par une carte électronique convertisseur fréquence / Tension. Ce PCB convertit les signaux en fréquence issus des capteurs des plateformes en signaux en tension compatible avec les micro-controlleurs Arduino des consoles de commandes.
Une carte est capable de convertir un signal en fréquence, par conséquent, quatre cartes de ce type sont nécessaires pour mesures les vitesse de rotation des moteurs des quatre plateformes des quatre axes du pont élévateur.
Modélisation 3D
Conception 3D
La modélisation du poste électrique équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
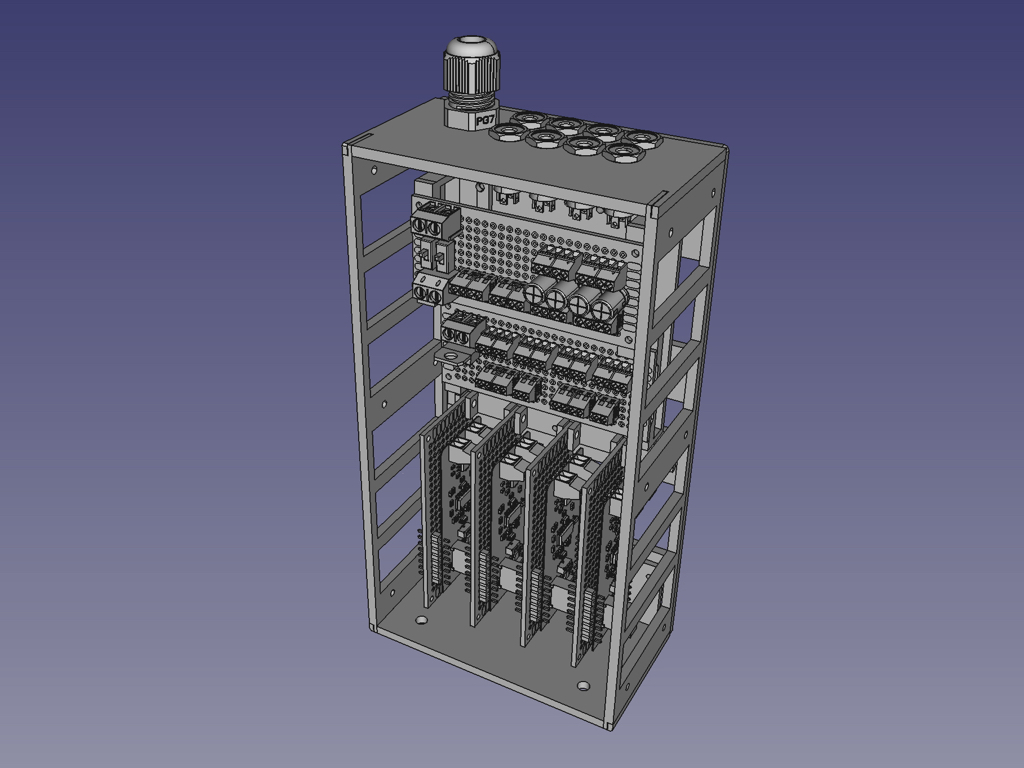
Tous les composants d’une même page de schéma sont regroupés dans une armoire électrique à l’échelle 1/12. On obtient ainsi, une première armoire électrique sur laquelle sont raccordés les moteurs électriques, les commandes manuelles et le signal carré de contrôle de la vitesse de rotation des moteurs, issus de la console de commandes. La deuxième armoire électrique est raccorder aux photocoupleurs des capteurs de mesure de la vitesse de rotation des moteurs et à la console de commande pour lui transmettre les signaux électriques correspondants aux vitesses de rotation.
Cet article ne détaille pas la conception de la structure des armoires électriques. Cette conception a déjà fait l’objet d’un article spécifique.
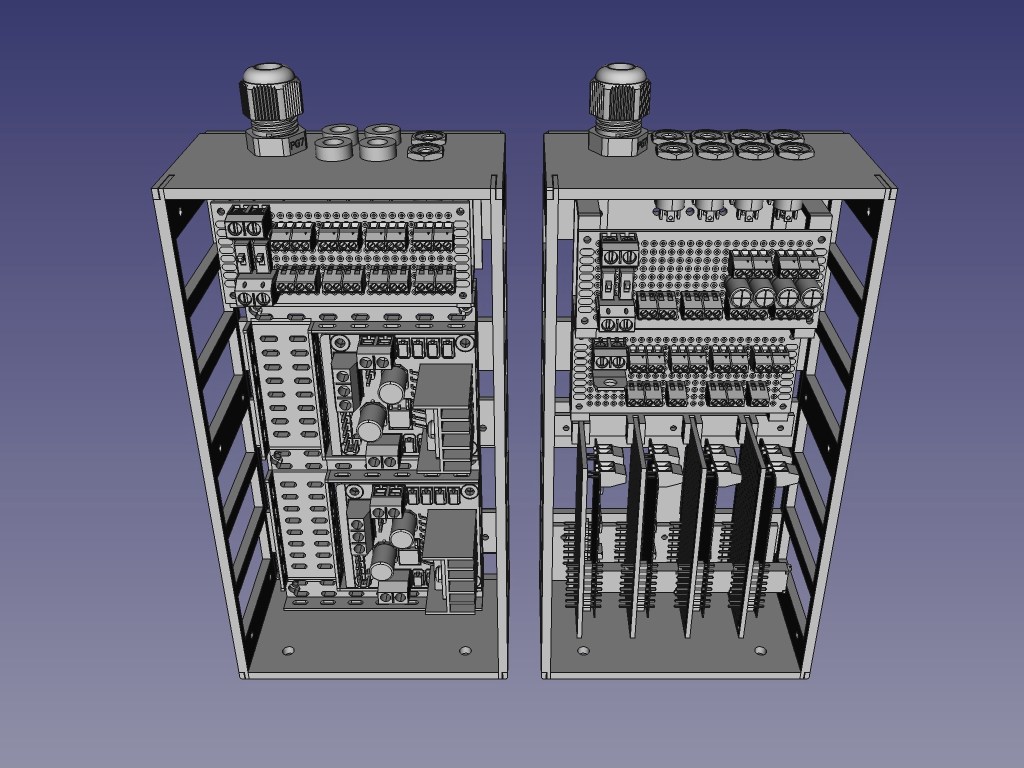
Screenshot FreeCAD Terminal Block Measures Control
Compte tenu des dimensions à l’échelle 1/12 de ces armoires électriques, la conception de l’intégration des composants doit être précise. Le point crucial réside dans le design et l’intégration des borniers de raccordement électriques.
Cet article présente le premier modèle opérationnel du local électrique à l’échelle 1/12 du diorama pédagogique Batcave du projet BATLab112. Il décrit la fabrication itérative du poste électrique fonctionnel, sa distribution des tensions adaptées à des contraintes techniques et de sécurité, ainsi que des aspects de réalisation mécanique et d’éclairage intégré.… Lire la suite →
Introduction : rôle et enjeux du poste électrique dans le diorama pédagogique de la Batcave
Le poste électrique intégré au diorama de la Batcave du projet BATLab112 constitue un élément structurant et central de l’infrastructure technique du diorama. Il assure la distribution de l’énergie électrique nécessaire au fonctionnement de l’ensemble des systèmes industriels miniaturisés à l’échelle 1/12. Conçu comme un équipement pleinement opérationnel, ce poste électrique vise à reproduire, avec un haut degré de fidélité, les principes de fonctionnement d’un poste électrique réel, tout en étant adapté aux contraintes propres à un dispositif pédagogique et expérimental.
La réalisation de ce prototype ne s’est pas inscrite dans une démarche linéaire aboutissant à une version définitive unique, mais s’est développée de manière itérative tout au long de la phase de conception. Cet article s’inscrit ainsi dans la continuité de la troisième évolution de la conception détaillée du poste électrique.
Architecture générale du poste électrique du diorama BATLab112
Le poste électrique du diorama se compose de deux sous-ensembles distincts, chacun ayant fait l’objet de phases spécifiques de conception et de prototypage : le poste de transformation HT/BT et les armoires de distribution électrique.
Poste HT/BT
Armoires de distribution électrique
Poste de transformation HT/BT à l’échelle 1/12 : adaptation fonctionnelle et contraintes de sécurité
Le poste HT/BT, réalisé à l’échelle 1/12 dans le cadre du diorama pédagogique du projet BATLab112, reproduit le fonctionnement général d’un poste de transformation réel. Toutefois, les niveaux de tension et les caractéristiques électriques des tensions d’entrée et de sortie ont été volontairement adaptés. Ces ajustements répondent, d’une part, aux contraintes techniques inhérentes au diorama et, d’autre part, aux exigences de sécurité liées à la manipulation des équipements. Dans ce contexte, la « haute tension » correspond à l’alimentation électrique générale du diorama, fournie par une prise secteur de 230 V en courant alternatif (AC), tandis que la « basse tension » est définie comme une tension de 12 V en courant continu (DC), compatible avec les besoins des modules électroniques intégrés au diorama, tels que les cartes Arduino, les écrans tactiles et les circuits imprimés.
Armoires de distribution électrique : gestion des tensions et rationalisation énergétique du diorama
Les armoires de distribution électrique assurent quant à elles la répartition des différentes tensions nécessaires à l’alimentation des modules électroniques et des actionneurs électromécaniques. La phase de conception préliminaire, associée au sourcing des composants, a permis de rationaliser l’architecture électrique en limitant à trois le nombre de niveaux de tension requis pour l’ensemble des modules électroniques : 5 VDC, 6 VDC et 12 VDC. Chaque armoire de distribution est dédiée à un niveau de tension spécifique. Une quatrième armoire est exclusivement consacrée à l’alimentation des moteurs du pont élévateur. Bien que ces moteurs fonctionnent également sous une tension de 12 VDC, ce choix vise à limiter la quantité d’énergie électrique transitant au sein d’une même armoire, dans une logique de sécurité et de gestion des flux énergétiques.
Caractéristiques électriques du réseau électrique du diorama
Les caractéristiques électriques détaillées du poste électrique du diorama du projet BATLab112 sont présentées dans l’article suivant :
Cet article propose une analyse technique approfondie des choix relatifs au câblage du réseau électrique du diorama pédagogique de la Batcave, reproduisant à l’échelle 1/12 une infrastructure électrique fonctionnelle. Il s’inscrit dans le cadre de la documentation technique du projet, en explicitant la conception et le dimensionnement du réseau de distribution électrique depuis la sortie du convertisseur de puissance jusqu’aux consoles de commande.
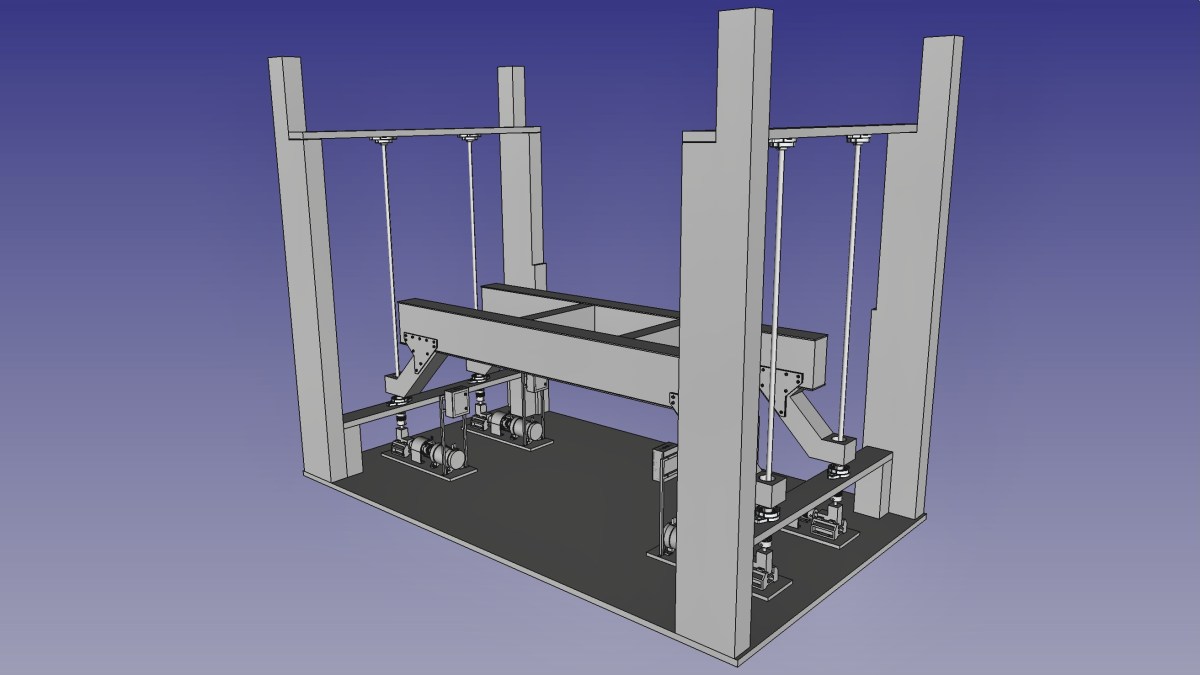
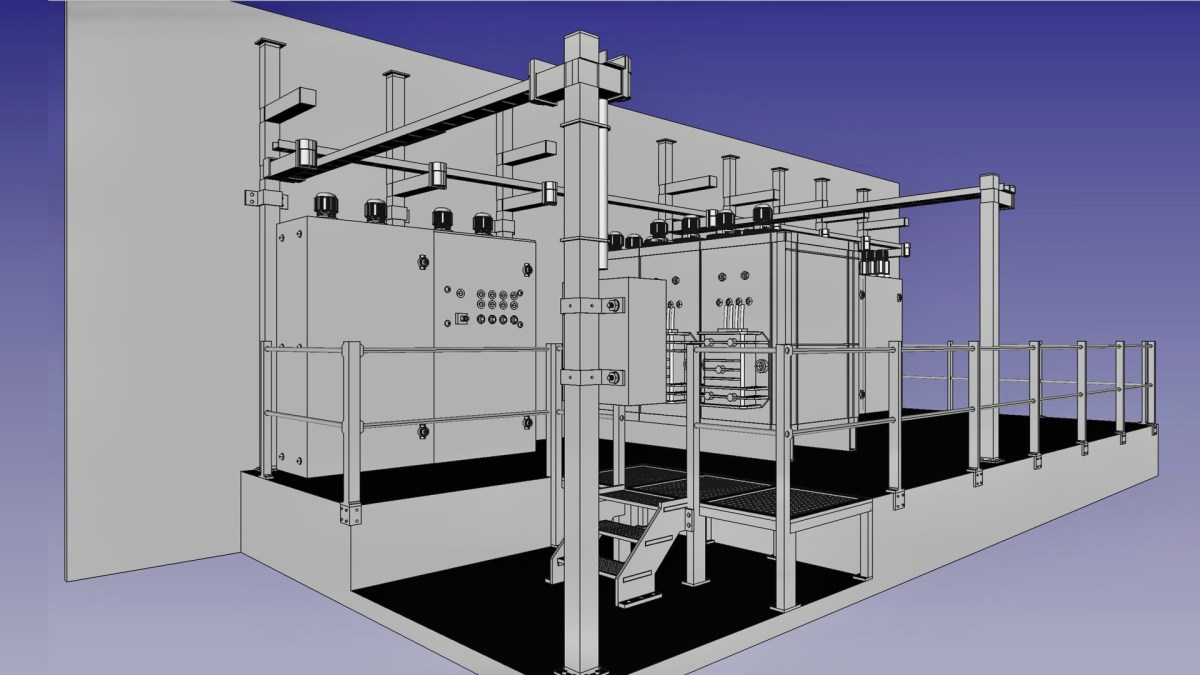
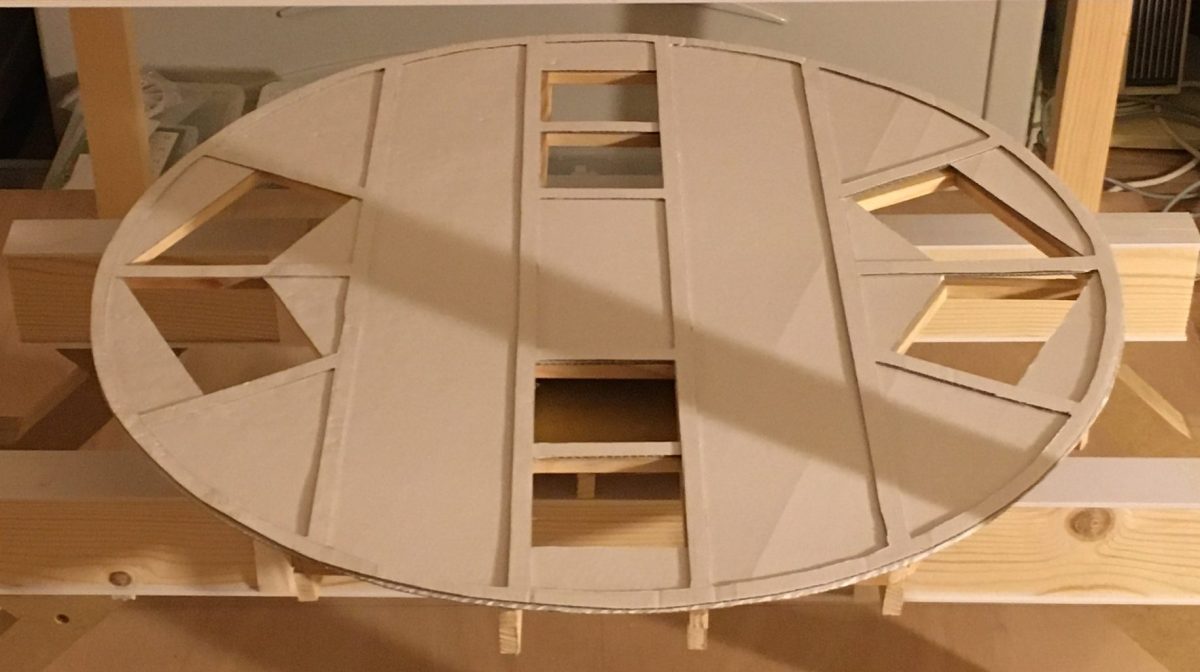
Garde-corps, passerelle et sécurité à l’échelle 1/12
Dans un souci de réalisme et de cohérence avec les standards industriels, la plateforme du local électrique a été équipée de garde-corps assurant la sécurité du personnel, ainsi que d’une passerelle d’accès. Ces éléments ont été réalisés à l’échelle 1/12 par un assemblage boulonné combinant des pièces issues de l’impression 3D — notamment les poteaux des garde-corps et la structure porteuse de la passerelle — et des éléments métalliques, tels que les traverses des garde-corps et le caillebotis de la passerelle.
Structure de support des câbles inspirée des racks industriels
Les câbles électriques raccordés aux différents composants du poste sont maintenus par une structure de support directement inspirée des racks de stockage de type cantilever utilisés en milieu industriel. Cette structure a été conçue à partir de profilés en aluminium, associés à des pièces d’assemblage imprimées en 3D, permettant à la fois une bonne rigidité mécanique et une flexibilité dans l’agencement des câbles.
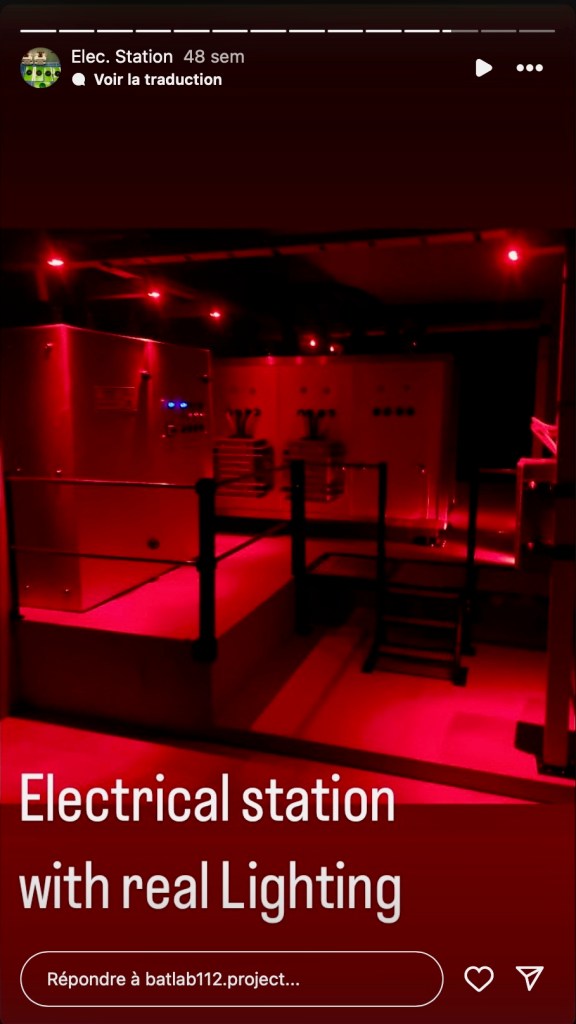
Système d’éclairage du poste électrique du diorama
Principe de câblage et alimentation des luminaires LED
À ce stade d’avancement du diorama, le système d’éclairage du poste électrique relève encore d’un prototype expérimental. Le principe retenu repose sur l’utilisation de boucles composées de six diodes électroluminescentes (LED) rouges montées en série, chacune étant capable de supporter une tension supérieure à 2 VDC. Chaque boucle est alimentée par une tension de 12 VDC. La mise en œuvre de deux boucles distinctes de six LED a été nécessaire pour assurer l’éclairage complet du poste électrique, tel qu’il apparaît sur les supports photographiques associés.
Limites techniques et axes d’amélioration du système d’éclairage
Si le rendu esthétique global est jugé satisfaisant, des améliorations restent à apporter concernant la technique de câblage des luminaires. Ces derniers, réalisés par impression 3D et équipés chacun d’une LED rouge, sont fixés sur les montants horizontaux de la structure métallique supportant les câbles. Toutefois, le raccordement électrique des luminaires au circuit 12 VDC présente une tenue mécanique insuffisante. Les vibrations induites par les opérations de branchement et de débranchement des connecteurs des armoires électriques peuvent entraîner la déconnexion intempestive des luminaires, ce qui souligne la nécessité d’une évolution de cette solution technique.
Modélisation 3D du diorama avec FreeCAD
La modélisation 3D du réseau électrique du diorama de la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCAD.
Le projet BATLab112 utilise la version 0.21.2 du modeleur 3D FreeCAD pour la conception du diorama de la Batcave à l’échelle 1/12. FreeCAD permet de structurer la conception du diorama en amont de sa fabrication, de visualiser des volumes, vérifier des proportions et anticiper des contraintes techniques. L’utilisation de FreeCAD constitue un support méthodologique rigoureux pour la réalisation précise et cohérente de l’ensemble.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
Cet article présente le premier prototype des plateformes de motorisation des axes du pont élévateur à l’échelle 1/12, du diorama de la Batcave du projet BATLab112.
L’article précédent celui-ci, présente la conception détaillée de la plateforme de motorisation des axes du pont élévateur. Cet article se focalise sur le design des composants de la plateforme et leurs dimensionnement pour aboutir à leurs modélisation 3D sur FreeCAD. Cette modélisation permet notamment de s’assurer de la bonne intégration du design général des plateformes de motorisation dans le diorama de la Batcave.
Pour rappel, le fonctionnement de ces plateformes de motorisation des axes du pont élévateur, repose sur trois composants actifs : un moteur, une roue codeuse et un engrenage à renvoi d’angle. Comme ces composants ont déjà été spécifiés dans l’article de conception détaillée, il s’agit ici, plus particulièrement, de focaliser sur la fabrication des pièces nécessaires pour assembler ces composants actifs sur la plateforme.
Sourcing
Le sourcing des composants actifs et des pièces mécaniques est réalisé à partir d’une plateforme de ventes en ligne. Ce choix est essentiellement dicté par un objectif de limiter le nombre de fournisseur, mais aussi de permettre une centralisation des commandes et ainsi d’envisager des économies d’échelle, notamment sur les frais de livraison.
Pour plus d’informations concernant les caractéristiques de ces composants, voir l’article sur la conception détaillée des plateformes moteurs :
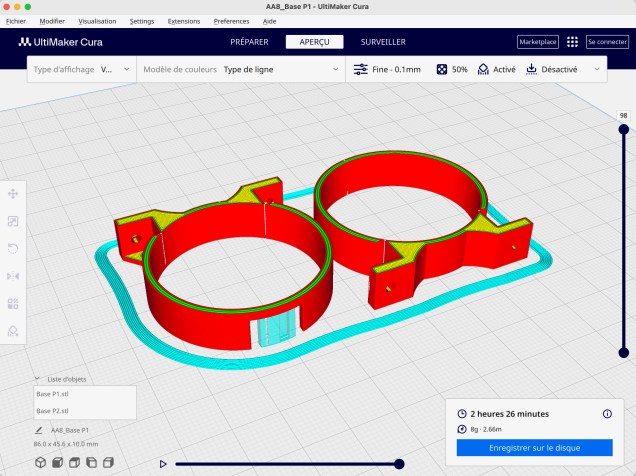
Le support moteur se compose de deux parties réalisées par impression 3D. Le design de ces deux parties est très similaire, la seule différence réside dans l’espace dédié au passage des câbles électriques sur la partie arrière. Chaque partie de ce support est montée sur le moteur par ajustement. La fixation de l’ensemble sur la plateforme est réalisé par boulonnage.
Modélisation 3D sur FreeCAD
Impression via CURA sur imprimante 3D Anet A8
Support du capteur de la roue codeuse
Le capteur de vitesse se compose d’une roue codeuse et d’un capteur photocoupleur fixe qui convertit la vitesse de rotation de la roue codeuse en signal électrique.
Le support du capteur photocoupleur se compose d’une seule pièce réalisée par impression 3D. Ce support assure le maintien du capteur en position et assure la fixation de l’ensemble sur la plateforme, par boulonnage.
Modélisation 3D sur FreeCAD
Conversion des fichiers STL sur CURA
Impression par imprimante 3D Anet A8
Support de l’engrenage à renvoi d’angle
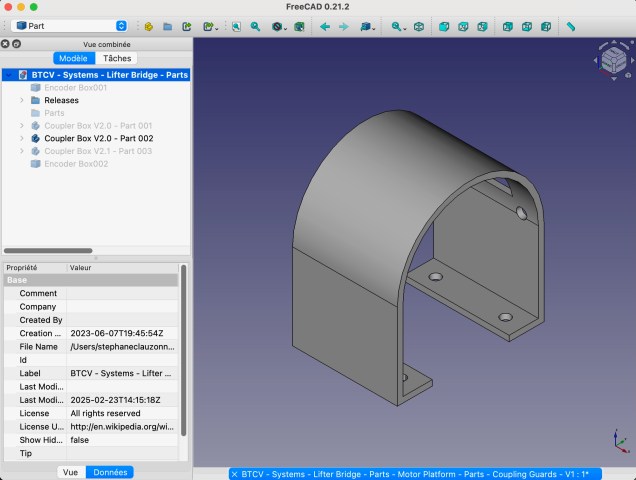
Ce support se compose de deux parties, réalisées par impression 3D, qui s’assemblent par emboitement. La forme de la partie supérieure du support assemblé est conçue pour maintenir latéralement l’engrenage à renvoi d’angle qui est fixé ensuite par boulonnage. Le support assure la fixation de l’ensemble sur la plateforme par boulonnage.
Modélisation 3D sur FreeCAD
Conversion des fichiers STL sur CURA
Impression par imprimante 3D Anet A8
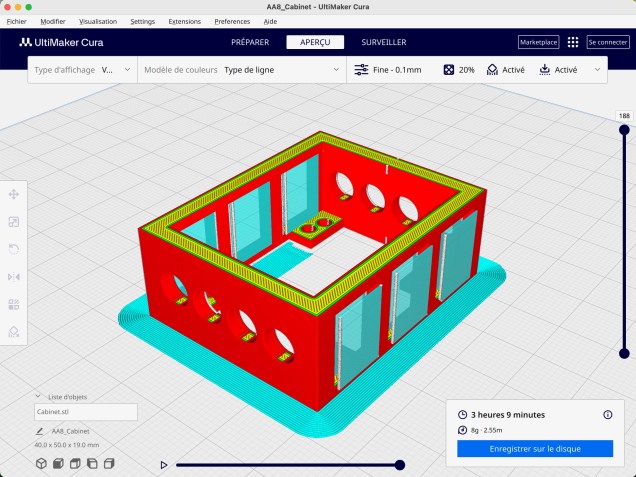
Armoire électrique
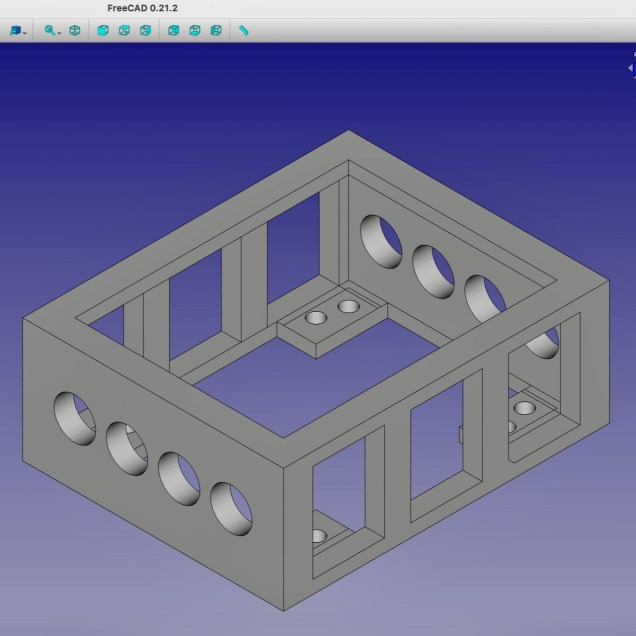
La phase de conception détaillée de la plateforme a apportée une modification au design de la structure des petites armoires électriques par rapport à celles déjà existantes sur le diorama. Ce nouveau design permet de prendre en compte le remplacement du bloc de jonction, initialement présent dans l’armoire, par un mini PCB. Cette structure est réalisée par impression 3D.
L’impression 3D des pièces des équipements industriels de la Batcave du projet BATLab112 a été réalisée avec une imprimante Anet A8 et le logiciel Cura.
La première version de la conception détaillée de tous les composants mécaniques du pont élévateur est achevée. La prochaine étape consiste à concevoir et réaliser le prototype de l’électronique de commande.
Cet article présente la deuxième partie de la conception détaillée, du pont élévateur à l’échelle 1/12, du diorama de la Batcave du projet BATLab112. Cette deuxième partie porte plus particulièrement sur les quatre plateformes moteurs et leur raccordement électrique.
Cet article est la suite de la conception détaillée de la structure mécanique du pont élévateur. L’objectif est à présent de concevoir le design mécanique des 4 plateformes de motorisation des 4 axes du pont élévateur.
Pour respecter l’objectif de réalisme du diorama pédagogique du projet BATLab112, le design des plateformes des moteurs du pont élévateur du diorama est directement inspiré de plateformes réelles.
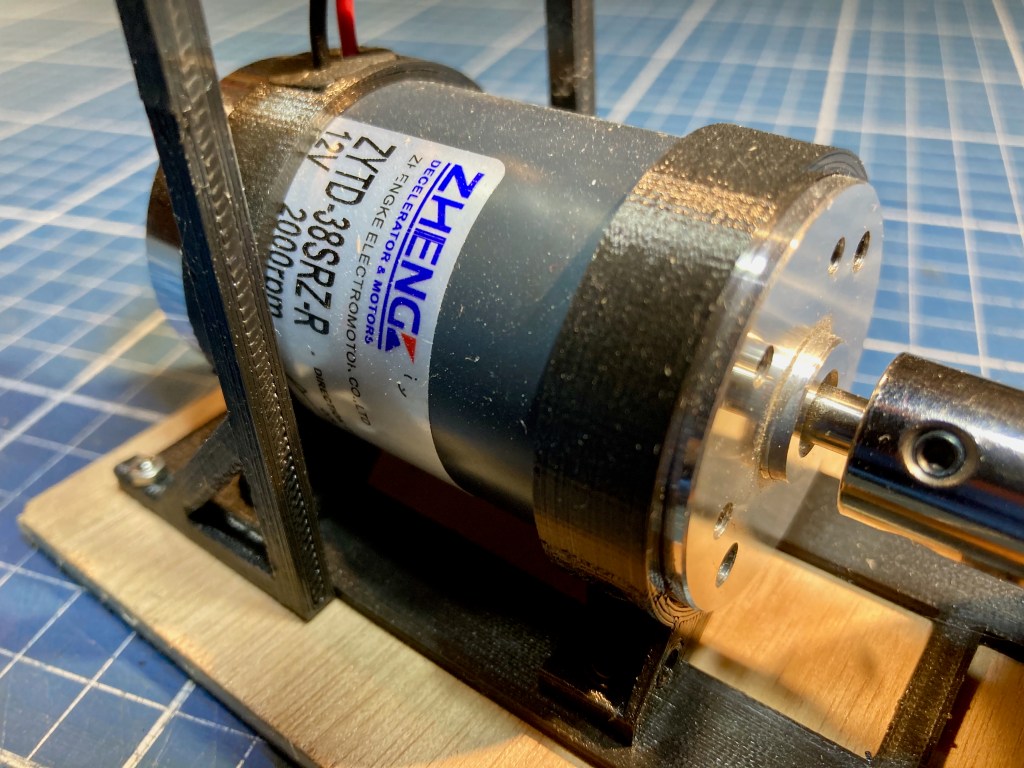
Le type d’équipement représentée sur la photo est une pompe à eau horizontale électrique très largement utilisé dans l’industrie.
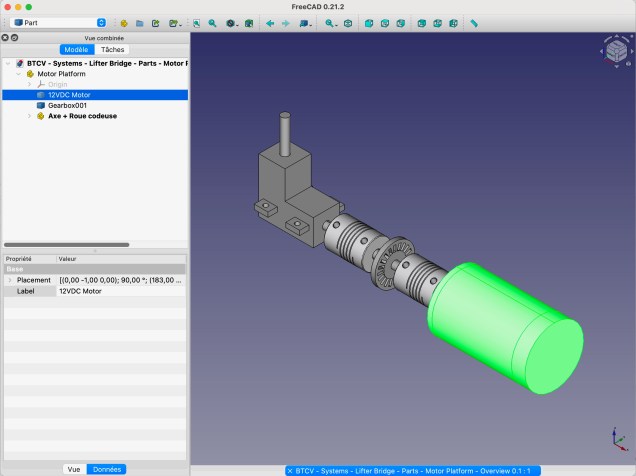
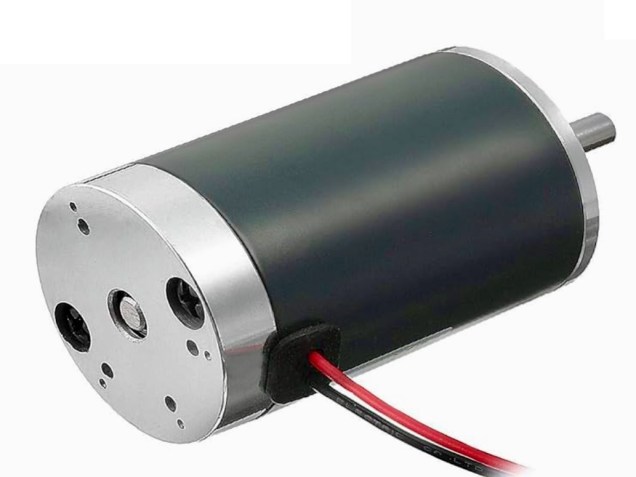
La motorisation des axes du pont élévateur se compose de 4 plateformes identiques, équipées chacune d’un moteur à courant continu couplé à une boîte de renvoi d’angle à 90°. Sur les 4 axes de couplage, une roue codeuse permet à un capteur optique de mesurer la vitesse de rotation du moteur et ainsi de contrôler la vitesse de déplacement vertical du pont élévateur.
BATLab112 Project – Lifter Bridge – Motor Platform – DC Motor
BATLab112 Project – Lifter Bridge – Motor Platform – Encoder
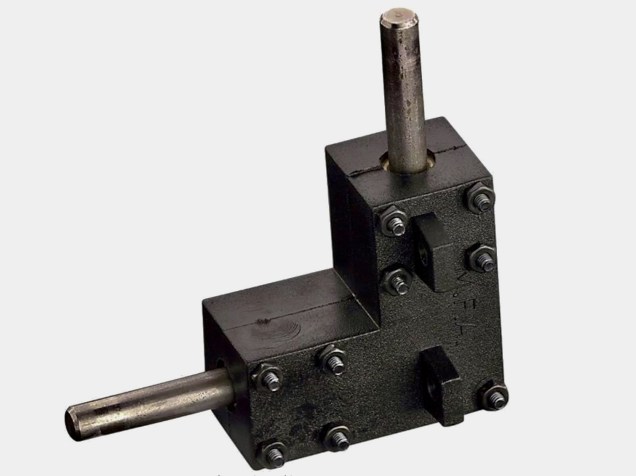
BATLab112 Project – Lifter Bridge – Motor Platform – Gearbox
Sourcing
Pour définir le design final de cet ensemble et s’assurer de son intégration mécanique dans le diorama, les composants sont sélectionnés dans la phase de conception détaillée en fonction de leurs dimensions et de leurs caractéristiques techniques.
Ce modèle de moteur est sélectionné pour ses dimensions mécaniques compatibles avec le rendu réaliste imposé par l’échelle 1/12 du diorama, mais aussi pour ses caractéristiques électriques garantissant le bon fonctionnement final du système. La tension d’alimentation en 12V, associée à une vitesse de rotation nominale élevée, laissent envisager un couple mécanique satisfaisant après réduction de la vitesse de rotation.
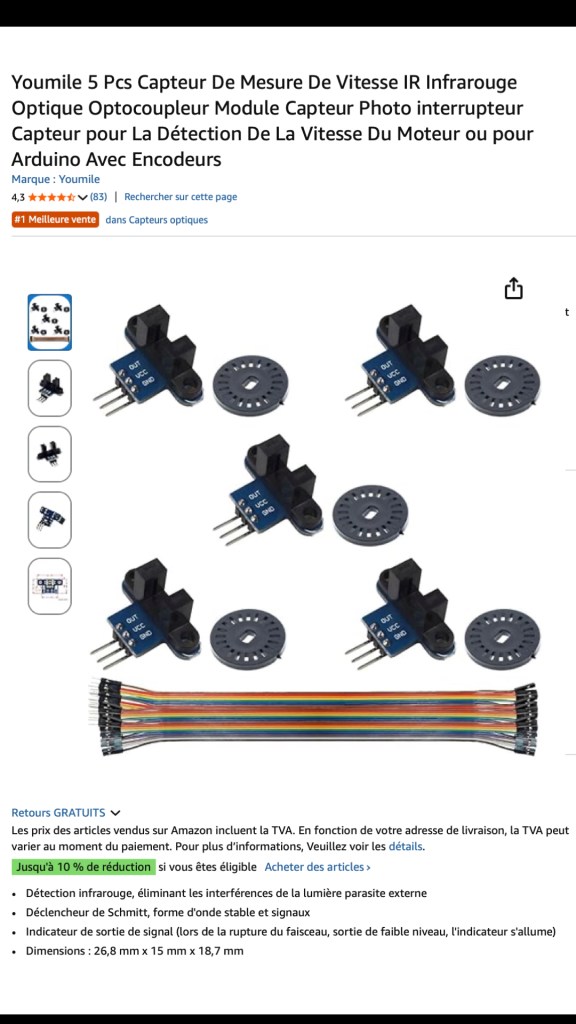
Roue codeuse et capteur optique
Ce capteur est sélectionné pour la simplicité de sa mise en œuvre, son encombrement compatible avec l’échelle du diorama et un signal de sortie numérique. Comme le montre la photo, ce modèle est souvent vendu par petit lot de pièces.
Engrenage angulaire
Le choix de ce type d’engrenage est relativement restreint sur un marché grand public autorisant des commandes à l’unité. Ce modèle d’engrenage angulaire est sélectionné pour son rapport de réduction de 1:1 mais aussi pour son design mécanique robuste, équipé de pattes de fixation.
Conception électrique
La conception électrique porte ici essentiellement sur l’armoire électrique qui doit assurer le raccordement de la tension d’alimentation des moteurs ainsi que le signal de sortie de la roue codeuse. Pour concevoir le design mécanique de cette armoire électrique, ainsi que son intégration générale sur la plateforme, il est nécessaire de penser auparavant sa conception électrique
L’objectif de reproduction réaliste du câblage d’une telle armoire n’est pas envisageable compte tenu des contraintes d’intégration des composants nécessaires. Cependant, les armoires électriques du pont élévateur vont faire l’objet d’une évolution dans leur design, par rapport à la conception des précédentes armoires électriques du diorama du projet BATLab112.
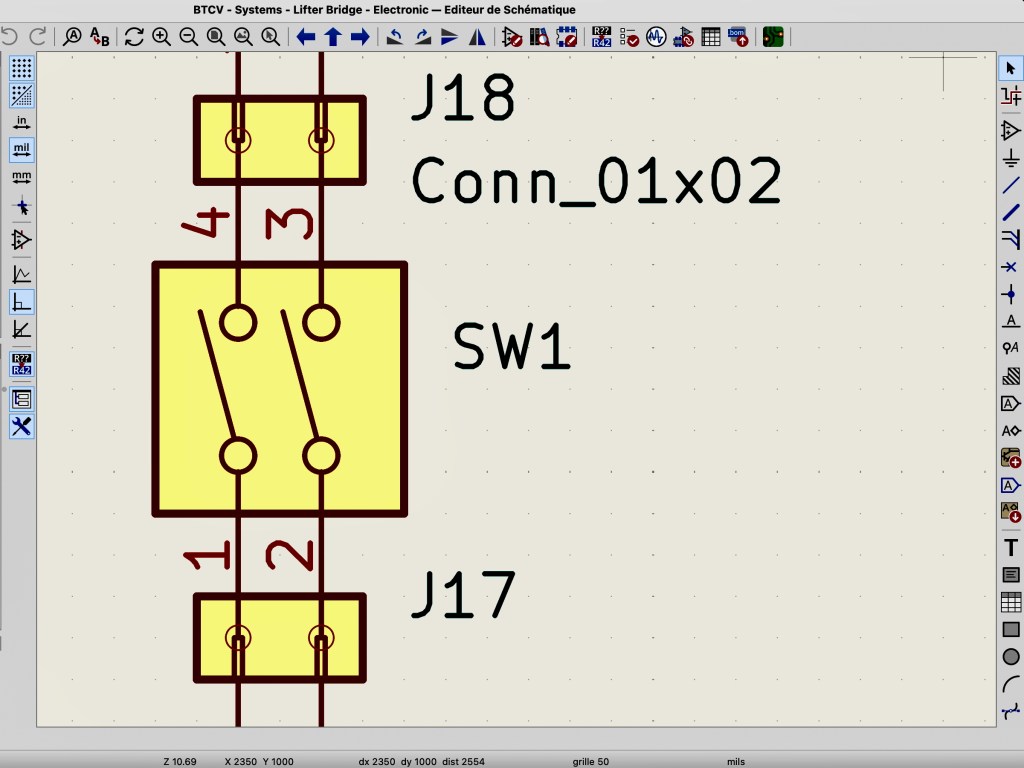
Screenshot
Sectionneur électrique
Le premier objectif est de remplacer le bloc de jonction, présent dans les premières armoires électriques du diorama, pour le raccordement électrique d’alimentation des moteurs, par un système à base de switches et de deux connecteurs, faisant office de sectionneur électrique comme illustré sur l’extrait du schéma ci-contre.
Bornier de raccordement
Le remplacement du bloc de jonction contraint aussi le câblage de la roue codeuse de chaque moteur. Elles seront donc raccordées via un connecteur à trois contacts, faisant office de bornier électrique.
Le projet BATLab112 utilise la version 0.21.2 de FreeCAD dans le cadre de la conception préliminaire et détaillée du diorama de la Batave à l’échelle 1/12.
La modélisation du poste électrique équipant la Batcave du projet BATLab112 a été réalisé avec le logiciel FreeCad V0.21.2
Contrairement à d’autres composants utilisés dans les systèmes industriels de la Batcave, aucun modèle 3D n’est disponible librement pour chacun dses composants de la plateforme ; moteur, roue codeuse, engrenage à renvoi d’angle. Par conséquent, leur modélisation 3D est réalisée avec le logiciel FreeCAD pour définir dans un premier temps leur design général. La prise en compte de leurs dimensions externes permet de présenter leurs intégration sur une plateforme.
Modélisation des composants électroniques
Les modèles 3D des composants électroniques sont disponibles dans la bibliothèque de GrabCAD
Les fichiers des modèles 3D utilisés lors de la conception préliminaire du poste HT/BT équipant la Batcave du projet BATLab112 sont téléchargés à partir de la plateforme GrabCAD.
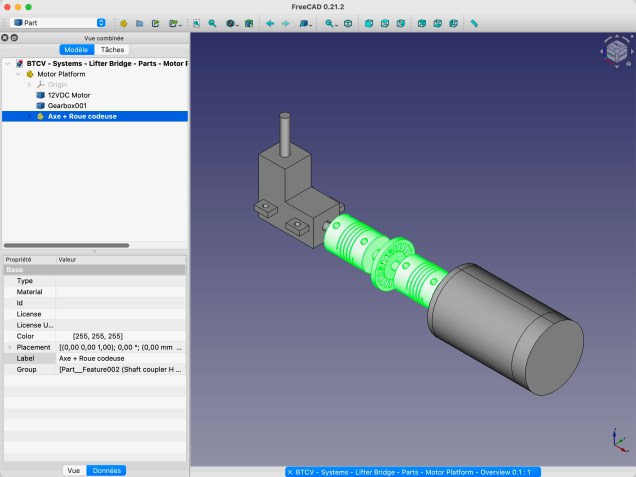
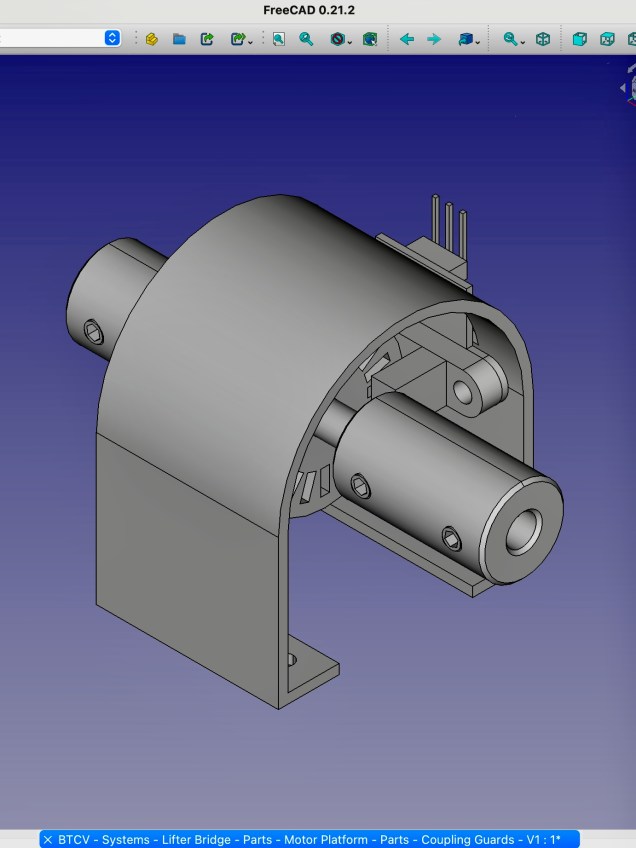
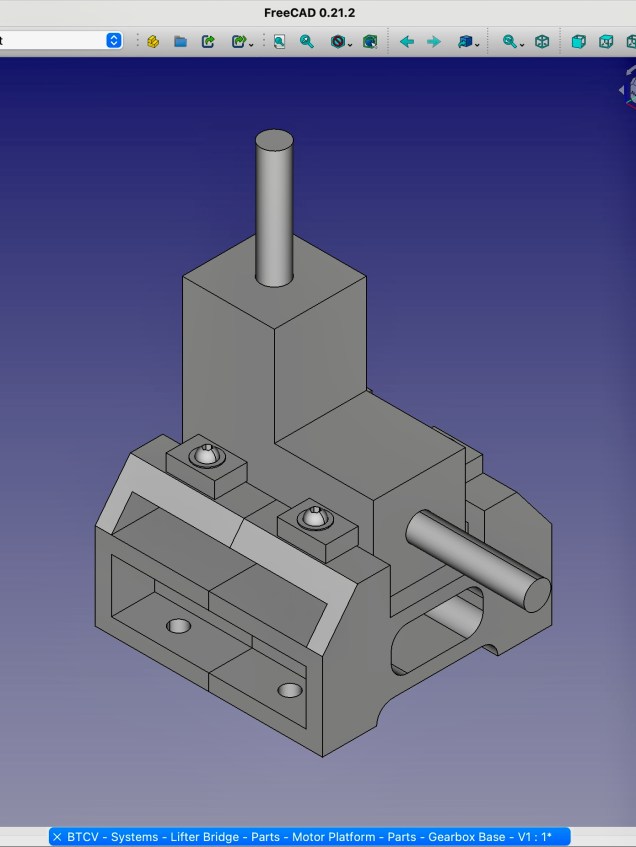
La modélisation complète et détaillée d’une plateforme nécessite l’intégration d’éléments complémentaires, comme le coupleur monté sur l’axe vertical en sortie de l’engrenage à renvoi d’angle, le portique supportant l’armoire électrique et aussi la base d’accueil et de fixation de tous les composants.
Vue d’ensemble
Prochaine étape
La première version de la conception détaillée de tous les composants mécaniques du pont élévateur est achevée. La prochaine étape consiste à concevoir et réaliser le prototype de l’électronique de commande.
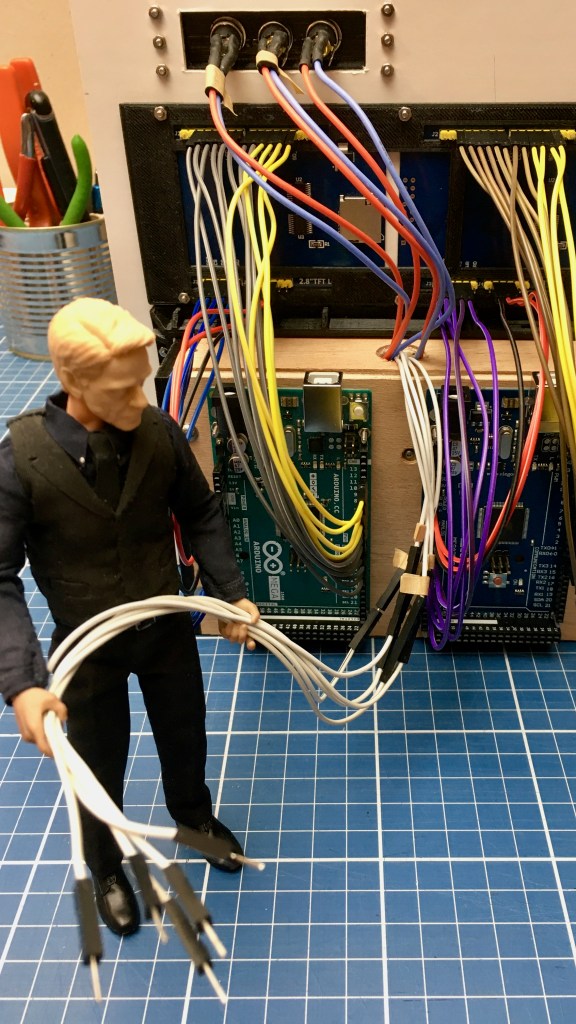
La phase de câblage, quelque soit l’équipement concerné, est toujours une étape très incertaine pour plusieurs raisons.
Intégrer des fils électriques dans un diorama à l’échelle 1/12 pose le problème de la compatibilité de l’espace disponible face aux normes électriques concernant la section des fils électriques.
La phase de conception des équipements de la Batcave du projet BATLab112 passe la modélisation 3D de ces équipements. Cependant, modéliser des câbles est une tâche fastidieuse et chronophage, par conséquent, cette tâche est souvent trop peu développée dans les phases de conception.
Le câblage est généralement la dernière étape dans la fabrication d’un prototype. Mais la fabrication d’un premier prototype nécessite souvent quelques adaptations par rapport à la conception. Donc malgré tout le soin apporté lors de la phase de conception, le câblage mis en œuvre doit s’adapter à ces modifications.
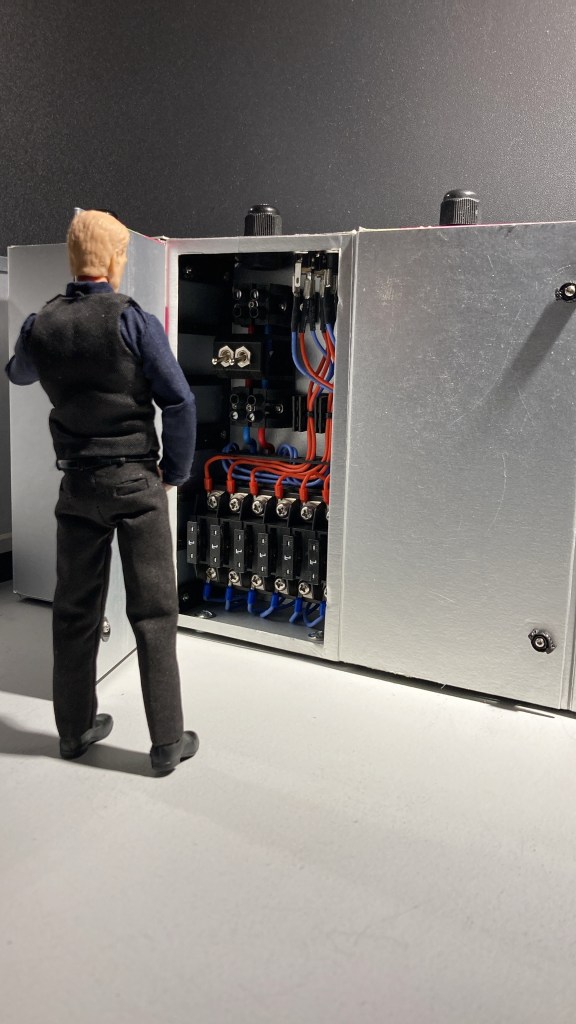
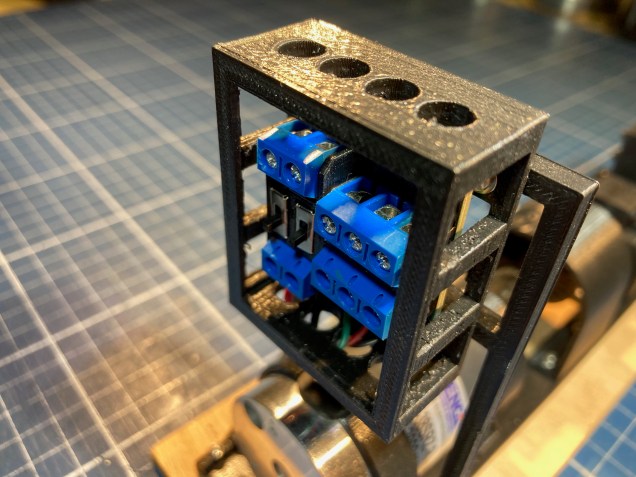
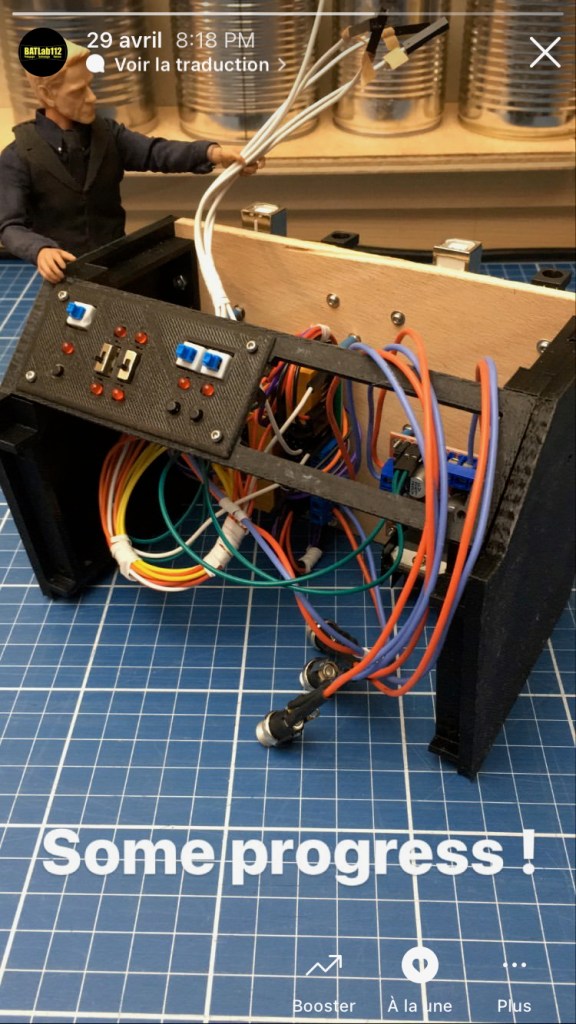
Après soudure des connecteurs sur le PCB installation dans l’armoire électrique.
Les 2 connecteurs bleus et les 2 switches implantés sur la gauche réalisent la fonction de sectionneur générale de l’alimentation électrique de tous les équipements de l’armoire.
Les connecteurs verts sont des bourbiers de connexion entre les équipements internes de l’armoire et les connecteurs externes.
Préparation des connecteurs de la deuxième l’armoire électrique dédiée au Pont élévateur.
1 passe câble presse étoupe pour raccorder le câble d’alimentation électrique de l’armoire
4 connecteurs de type Jack DC pour raccorder l’alimentation électrique des 4 moteurs du pont élévateur.
2 connecteurs de type Jack Audio 3.5mm pour raccorder le câble des signaux de commandes manuelles du sens de rotation des moteurs et le câble du signal PWM de contrôle de la vitesse de rotation des moteurs.